感應(yīng)電機(jī)損耗最小化預(yù)測(cè)控制策略研究
2024-04-03 14:42:44賀鴻彬顏秉洋汪鳳翔
微特電機(jī) 2024年3期
賀鴻彬,何 龍,顏秉洋,汪鳳翔
(1.福建農(nóng)林大學(xué) 機(jī)電工程學(xué)院,福州 350100;2.中國(guó)科學(xué)院海西研究院泉州裝備制造研究中心,泉州 362216;3.福州大學(xué) 先進(jìn)制造學(xué)院,泉州 362251)
0 引 言
感應(yīng)電機(jī)(以下簡(jiǎn)稱IM)具有經(jīng)濟(jì)性高、易于維護(hù)、體積小巧和耐用性強(qiáng)等優(yōu)點(diǎn),以感應(yīng)電機(jī)為動(dòng)力裝置的驅(qū)動(dòng)系統(tǒng)是工業(yè)領(lǐng)域的主流方案[1]。IM消耗的電能約占工業(yè)用電總量的60%,其運(yùn)行效率與其負(fù)載密切相關(guān),輕載工況下運(yùn)行效率較低,因此長(zhǎng)期處于輕載狀態(tài)下的IM具有較大的節(jié)能空間[2-4]。
損耗模型控制(LMC)是一種基于電機(jī)參數(shù)建立損耗模型的節(jié)能算法,通過對(duì)損耗模型求解,得到損耗最小時(shí)的磁鏈來提升效率[5-7]。傳統(tǒng)LMC具有簡(jiǎn)單、快速和不需要額外硬件等優(yōu)點(diǎn),但其高度依賴電機(jī)參數(shù),因此在外部干擾過大時(shí)電機(jī)系統(tǒng)的性能將大幅下降。文獻(xiàn)[8]采用模型參考自適應(yīng)算法(MRAS)對(duì)模型參數(shù)的集總進(jìn)行觀測(cè),重構(gòu)電機(jī)損耗模型,解決了LMC參數(shù)依賴的問題,但其缺少對(duì)電流側(cè)的優(yōu)化,因此系統(tǒng)的動(dòng)態(tài)性能較差。文獻(xiàn)[9]采用遺傳算法提高了電機(jī)的動(dòng)態(tài)性能,并提出一種基于集成損耗模型的最優(yōu)效率控制,該方案綜合考慮了電機(jī)與逆變電路的損耗,但其算法過于復(fù)雜,要求較高的硬件支撐,不具備通用性。文獻(xiàn)[10]提出一種自適應(yīng)LMC方案,并用模型預(yù)測(cè)控制(MPC)提高系統(tǒng)動(dòng)態(tài)性能,但其損耗模型未考慮鐵損及漏感參數(shù)的影響。
針對(duì)上述問題,本文提出一種MRAS與連續(xù)控制集模型預(yù)測(cè)控制(以下簡(jiǎn)稱CCS-MPC)相結(jié)合的效率優(yōu)化策略。基于CCS-MPC的電流環(huán)控制器有效解決了傳統(tǒng)PI控制抗干擾能力差、動(dòng)態(tài)響應(yīng)慢的問題。同時(shí)CCS-MPC具有算法簡(jiǎn)單和控制精度高的優(yōu)勢(shì),較為貼合效率優(yōu)化需求。采用MRAS對(duì)損耗模型中的定子電阻進(jìn)行在線辨識(shí),消除了電機(jī)運(yùn)行發(fā)熱導(dǎo)致參數(shù)失配的問題。最后,仿真與實(shí)驗(yàn)結(jié)果驗(yàn)證了所提算法的可行性和有效性。
1 考慮鐵損的LMC策略
1.1 考慮鐵損的IM模型
三相IM是一個(gè)復(fù)雜的非線性系統(tǒng),傳統(tǒng)損耗模型忽略鐵損以簡(jiǎn)化模型結(jié)構(gòu)。然而,鐵損在實(shí)際系統(tǒng)中是客觀存在的,簡(jiǎn)化模型將會(huì)產(chǎn)生較大誤差,因此本文以IM轉(zhuǎn)子磁場(chǎng)定向?yàn)樗惴ɑA(chǔ),建立基于兩相旋轉(zhuǎn)坐標(biāo)系的鐵損電機(jī)動(dòng)態(tài)模型,如圖1所示。考慮到三相IM的轉(zhuǎn)子漏感對(duì)電機(jī)控制影響較小,可將其忽略。為了更清楚地顯示鐵損與功耗之間的關(guān)系,使用等效鐵損電阻RFe替代鐵心損耗。
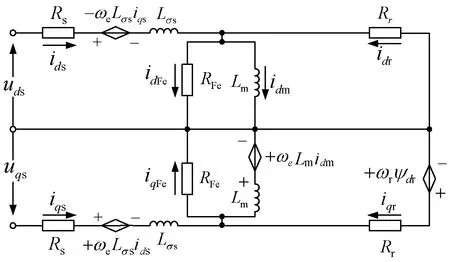
圖1 轉(zhuǎn)子磁場(chǎng)定向下的d-q軸動(dòng)態(tài)鐵損IM模型
圖1中:id,qs,id,qr,idm,id,qFe分別為基于dq軸的定子電流、轉(zhuǎn)子電流、互感電流和鐵損電流;ud,qs,ωe,ωr,ψdr分別為輸入電壓、同步角速度、轉(zhuǎn)子電角速度和轉(zhuǎn)子磁鏈;Rs,Rr分別為定、轉(zhuǎn)子電阻;Lm,Lσs分別為互感和定子漏感。
根據(jù)轉(zhuǎn)子磁場(chǎng)定向特性,電機(jī)動(dòng)態(tài)方程應(yīng)滿足以下條件:
(1)
結(jié)合上述條件,電機(jī)的電磁轉(zhuǎn)矩方程如下:
(2)
結(jié)合圖1,根據(jù)基爾霍夫電壓、電流定律和上述條件,得到簡(jiǎn)化電機(jī)動(dòng)態(tài)方程:
(3)
式中:TL表示負(fù)載轉(zhuǎn)矩;p,J分別表示電機(jī)極對(duì)數(shù)和轉(zhuǎn)動(dòng)慣量;Rt表示電機(jī)轉(zhuǎn)子電阻Rr和鐵損等效電阻RFe的并聯(lián)電阻。
1.2 基于LMC的效率優(yōu)化
從圖1能夠得到以下關(guān)系式:
(4)
當(dāng)電機(jī)處于穩(wěn)態(tài)時(shí),電流和磁鏈達(dá)到穩(wěn)定,其變化率接近為零,因此式(4)中的微分項(xiàng)都為零,整理可得:
(5)
電機(jī)的損耗功率可以表示:
(6)
式中:ptotal,pcus,pcur,piron分別表示總損耗、定子銅損耗、轉(zhuǎn)子銅損耗和鐵損耗。
當(dāng)電機(jī)達(dá)到穩(wěn)態(tài)時(shí),ωe和ωr保持穩(wěn)定。此時(shí),電機(jī)的總損耗將取決于ids,iqs和idm,又穩(wěn)態(tài)時(shí)ids=idm,因此總損耗表達(dá)式可簡(jiǎn)化為:
(7)
其中,
(8)
電磁轉(zhuǎn)矩的表達(dá)式可以簡(jiǎn)化如下:
(9)
損耗方程是一個(gè)典型的凹函數(shù),必然存在一個(gè)ids使得總損耗最小。聯(lián)立式(5)、式(7),求得總損耗關(guān)于ids的導(dǎo)數(shù):
(10)
因此,損耗最小時(shí)的磁鏈值可以表示:
(11)
2 基于LMC-MPC的效率優(yōu)化策略
2.1 電機(jī)定子電阻辨識(shí)
LMC算法高度依賴電機(jī)參數(shù)進(jìn)行磁鏈計(jì)算,參數(shù)的變化將降低最優(yōu)磁鏈的精度,為此,引入了MRAS對(duì)電機(jī)定子電阻進(jìn)行實(shí)時(shí)觀測(cè),以提升LMC的參數(shù)魯棒性,其結(jié)構(gòu)如圖2所示。
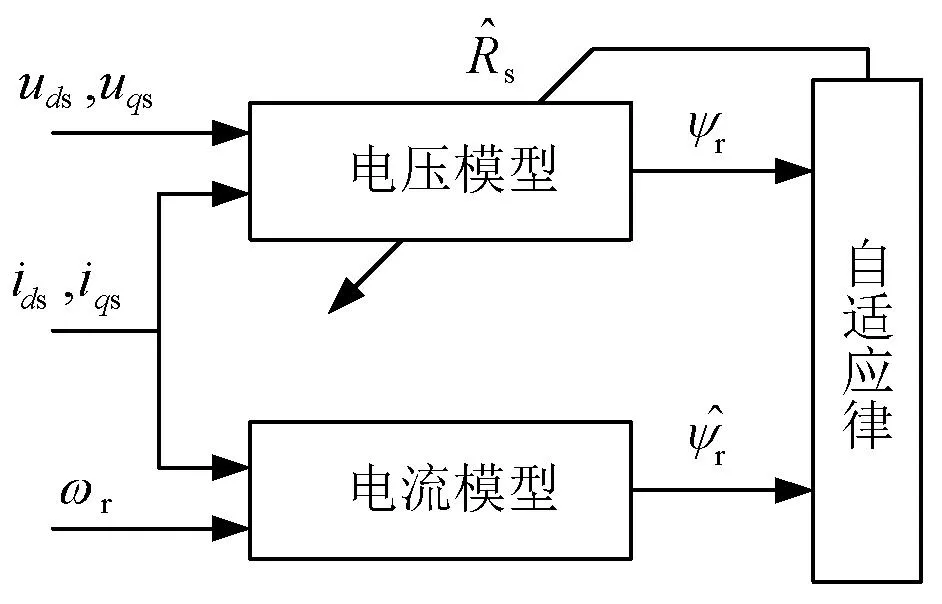
圖2 MRAS算法框圖

電壓模型:
(12)
電流模型:
(13)

(14)
根據(jù)波波夫超穩(wěn)定性理論,系統(tǒng)要達(dá)穩(wěn)定須滿足以下不等式:

(15)
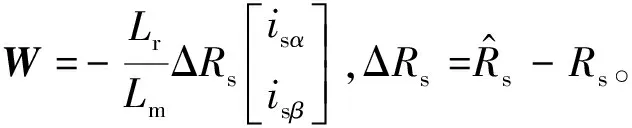
因此,可以得到下述自適應(yīng)律:
(16)
為提高收斂性,引入了比例環(huán)節(jié),最終定子電阻的辨識(shí)可以表示:

(17)
2.2 基于CCS-MPC的電流環(huán)控制器
效率優(yōu)化算法的核心在于精確跟蹤和控制轉(zhuǎn)子磁鏈,因此控制器動(dòng)態(tài)性能的優(yōu)劣將直接影響效率優(yōu)化算法的有效性。常規(guī)PI雖然能一定程度上滿足控制需求,但由于魯棒性差、控制參數(shù)復(fù)雜且難調(diào),無法面對(duì)復(fù)雜工況。為此,設(shè)計(jì)基于CCS-MPC的電流控制器,CCS-MPC具有簡(jiǎn)單的工作原理、靈活的控制模式和強(qiáng)大的非線性約束適應(yīng)性等優(yōu)勢(shì),能夠提供更高的穩(wěn)態(tài)精度和更小的電流紋波,其算法結(jié)構(gòu)如圖3所示。
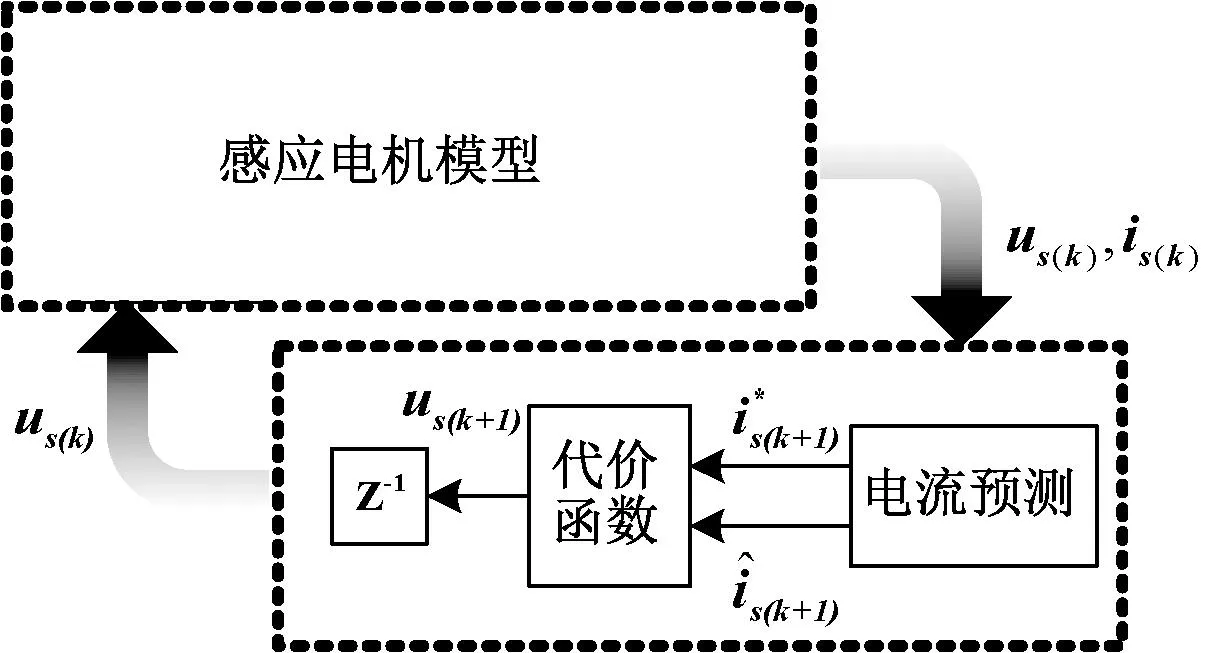
圖3 CCS-MPC結(jié)構(gòu)圖
結(jié)合電機(jī)鐵損模型,根據(jù)前向歐拉法,定子電流可以離散化為:
(18)
CCS-MPC的損失函數(shù)設(shè)計(jì)如下:

(19)
(20)
本文所提策略的控制框圖如圖4所示。其中外環(huán)為轉(zhuǎn)速控制器和LMC算法;內(nèi)環(huán)主為CCS-MPC。MRAS從電機(jī)獲取反饋信號(hào),辨識(shí)出定子電阻輸入到LMC和CCS-MPC;LMC和轉(zhuǎn)速控制器輸出參考電流;CCS-MPC獲取到反饋電流后,輸出最優(yōu)電壓矢量;最后經(jīng)過SVPWM和逆變電路轉(zhuǎn)換為三相正弦電壓。
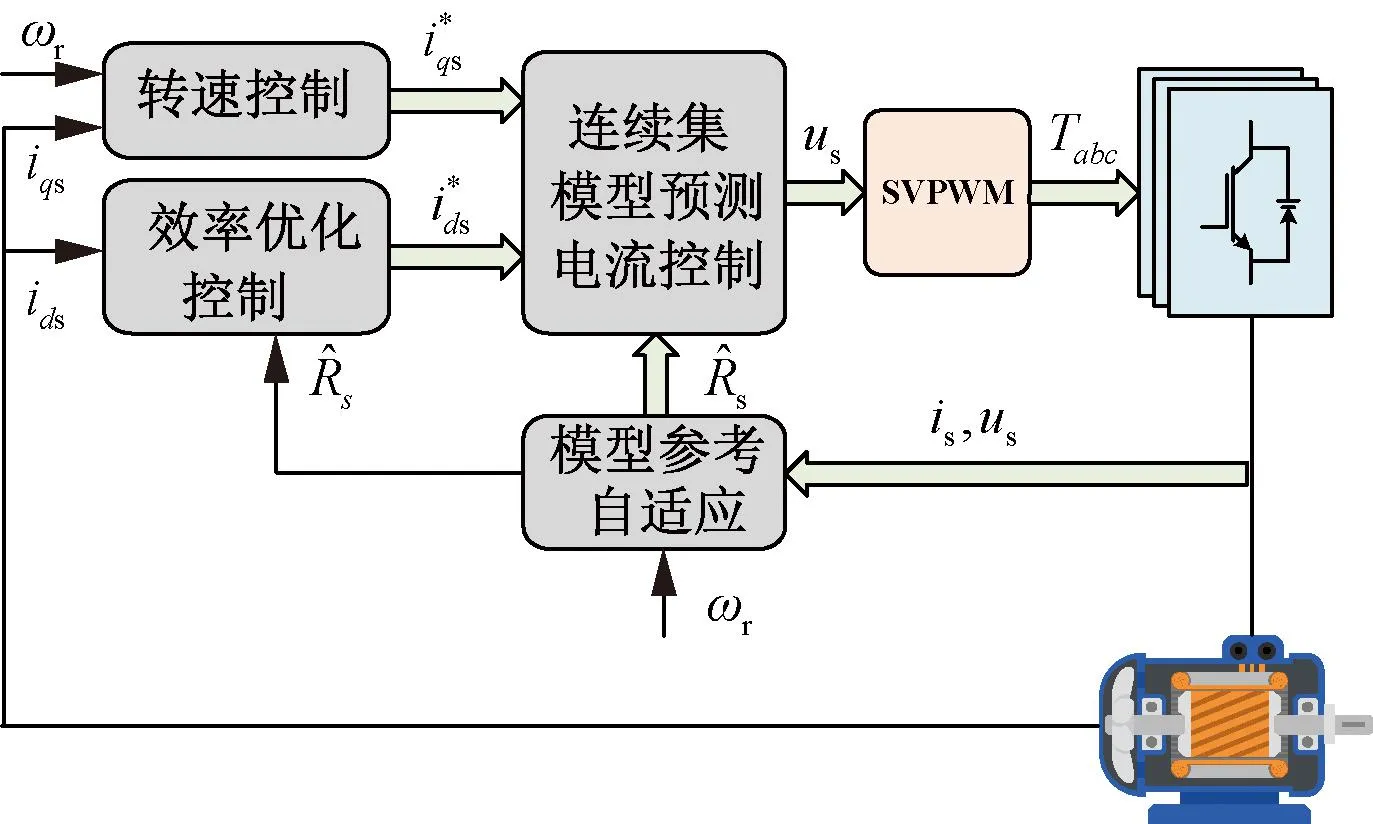
圖4 LMC-CCSMPC結(jié)構(gòu)圖
3 仿真與實(shí)驗(yàn)
3.1 仿真結(jié)果
3.1.1 定子電阻辨識(shí)仿真
為驗(yàn)證所提算法對(duì)定子電阻辨識(shí)的有效性,搭建了基于鐵損電機(jī)模型的參數(shù)辨識(shí)仿真,仿真結(jié)果如圖5和圖6所示。圖5中:Rs-re,Rs-ob分別為實(shí)際電阻與辨識(shí)電阻。圖6中:CM, VM分別表示電流模型與電壓模型。
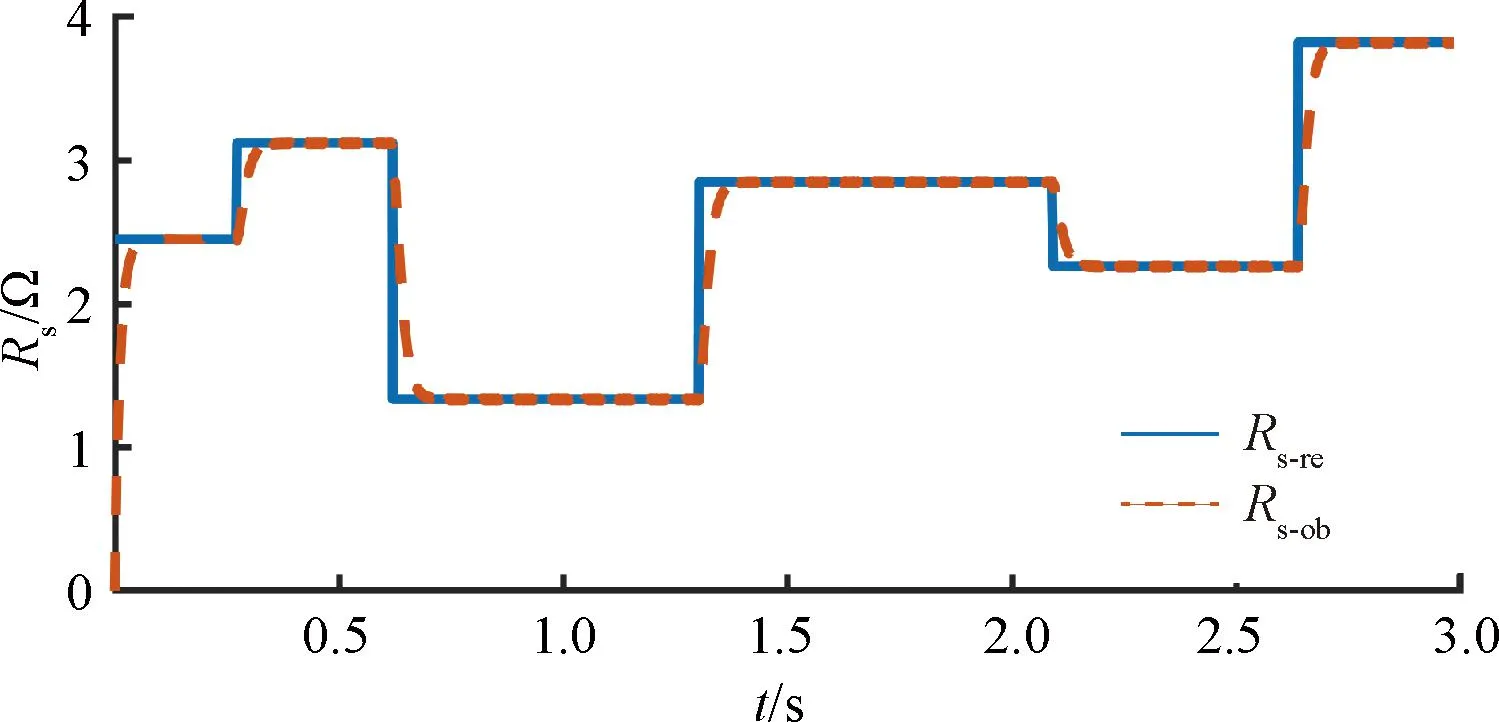
圖5 Rs辨識(shí)結(jié)果
圖5為電阻識(shí)別的結(jié)果,可以看出在電阻頻繁變化時(shí),控制算法仍能穩(wěn)定跟蹤,并且跟蹤誤差為±0.005 Ω。圖6比較了參考磁通鏈和估計(jì)磁通鏈的軌跡,當(dāng)系統(tǒng)穩(wěn)定時(shí),兩者軌跡幾乎重合。從仿真結(jié)果可知,所提算法能夠有效辨識(shí)電機(jī)的實(shí)時(shí)電阻,具備提高LMC參數(shù)魯棒性的功能。
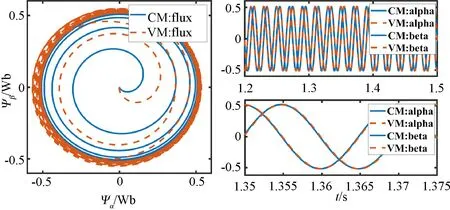
圖6 參考磁鏈與觀測(cè)磁鏈
3.1.2 基于LMC-MPC的效率優(yōu)化仿真
在轉(zhuǎn)速恒定的條件下,分別比較了LMC-MPC和LMC-PI兩種算法的動(dòng)態(tài)性能和效率優(yōu)化效果。仿真條件為:在1 s時(shí)負(fù)載從2 N·m突變到4 N·m;2 s時(shí)再?gòu)? N·m降回2 N·m;3.4 s時(shí),加入效率優(yōu)化算法。
從圖7可知,負(fù)載為2 N·m時(shí),LMC-MPC比LMC-PI效率提升16.7%,負(fù)載為4 N·m時(shí),LMC-MPC比LMC-PI效率提升25.7%。
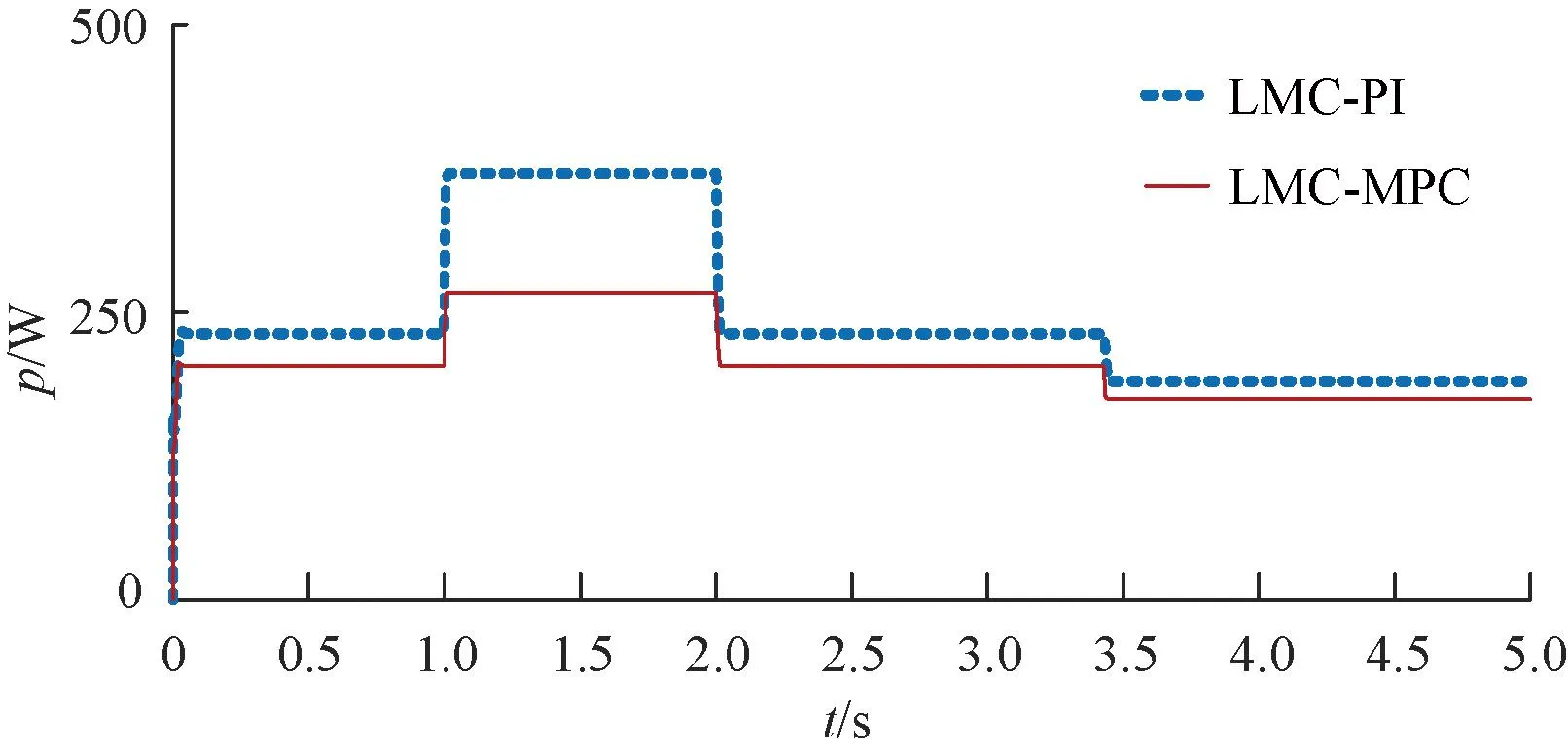
圖7 損耗功率變化曲線
從圖8可知,在負(fù)載突變時(shí),LMC-MPC相較于LMC-PI具有更快的動(dòng)態(tài)響應(yīng)。因此,所提算法能夠有效提高系統(tǒng)的動(dòng)態(tài)性能和效率。
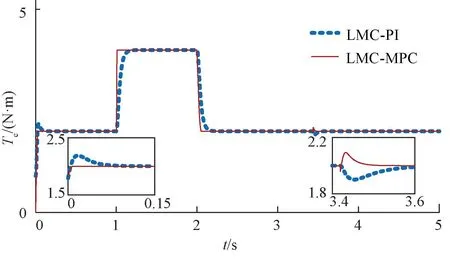
圖8 轉(zhuǎn)矩變化曲線
3.2 實(shí)驗(yàn)結(jié)果
為驗(yàn)證所提算法的有效性,搭建了三相IM效率優(yōu)化對(duì)拖平臺(tái)。該平臺(tái)的采樣頻率和控制頻率都為12.5 kHz,數(shù)字控制器采用FPGA&ARM芯片ZYNQ7000,實(shí)驗(yàn)電機(jī)的主要參數(shù)如表1所示。
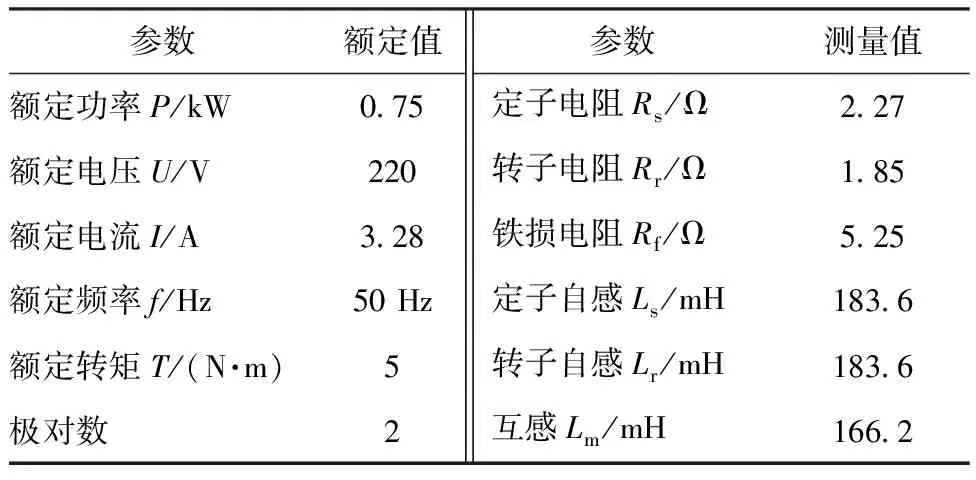
表1 感應(yīng)電機(jī)平臺(tái)參數(shù)
實(shí)驗(yàn)平臺(tái)如圖9所示,包含轉(zhuǎn)矩轉(zhuǎn)速分析儀、直流電源、功率分析儀、控制器、控制電機(jī)和對(duì)拖電機(jī)。其中對(duì)拖電機(jī)為三相永磁同步電機(jī),采用某公司的CDHD變頻器驅(qū)動(dòng)。
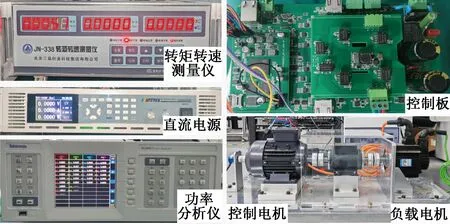
圖9 感應(yīng)電機(jī)平臺(tái)
3.2.1 正反轉(zhuǎn)實(shí)驗(yàn)
為驗(yàn)證CCS-MPC算法在轉(zhuǎn)速反轉(zhuǎn)工況下的魯棒性,就電機(jī)平臺(tái)進(jìn)行了實(shí)驗(yàn),實(shí)驗(yàn)中轉(zhuǎn)速?gòu)? 500 r/min突變到-1 500 r/min。實(shí)驗(yàn)結(jié)果如圖10所示。
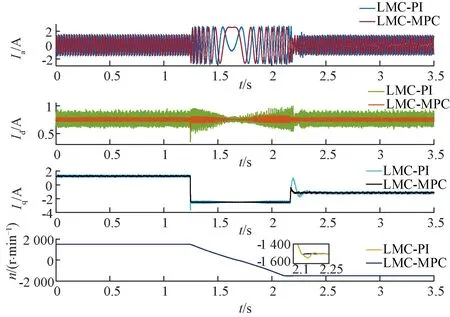
圖10 反轉(zhuǎn)實(shí)驗(yàn)圖
圖10中:Ia,Id,Iq,n分別是電機(jī)的A相電流、d,q軸電流和轉(zhuǎn)速,電機(jī)轉(zhuǎn)速在0.11 s處反轉(zhuǎn)。
如圖10,電機(jī)實(shí)測(cè)轉(zhuǎn)速在1.25 s處開始反轉(zhuǎn),從電流及轉(zhuǎn)速曲線可以得到,LMC-MPC相較于LMC-PI具有更快的動(dòng)態(tài)響應(yīng),并且電流紋波更小、系統(tǒng)更穩(wěn)定。
3.2.2 效率優(yōu)化實(shí)驗(yàn)
為驗(yàn)證LMC-MPC算法的有效性,在不同轉(zhuǎn)速下進(jìn)行效率優(yōu)化實(shí)驗(yàn)。實(shí)驗(yàn)帶載1 N·m,轉(zhuǎn)速分別為300 r/min和600 r/min,實(shí)驗(yàn)結(jié)果如圖11、圖12所示。
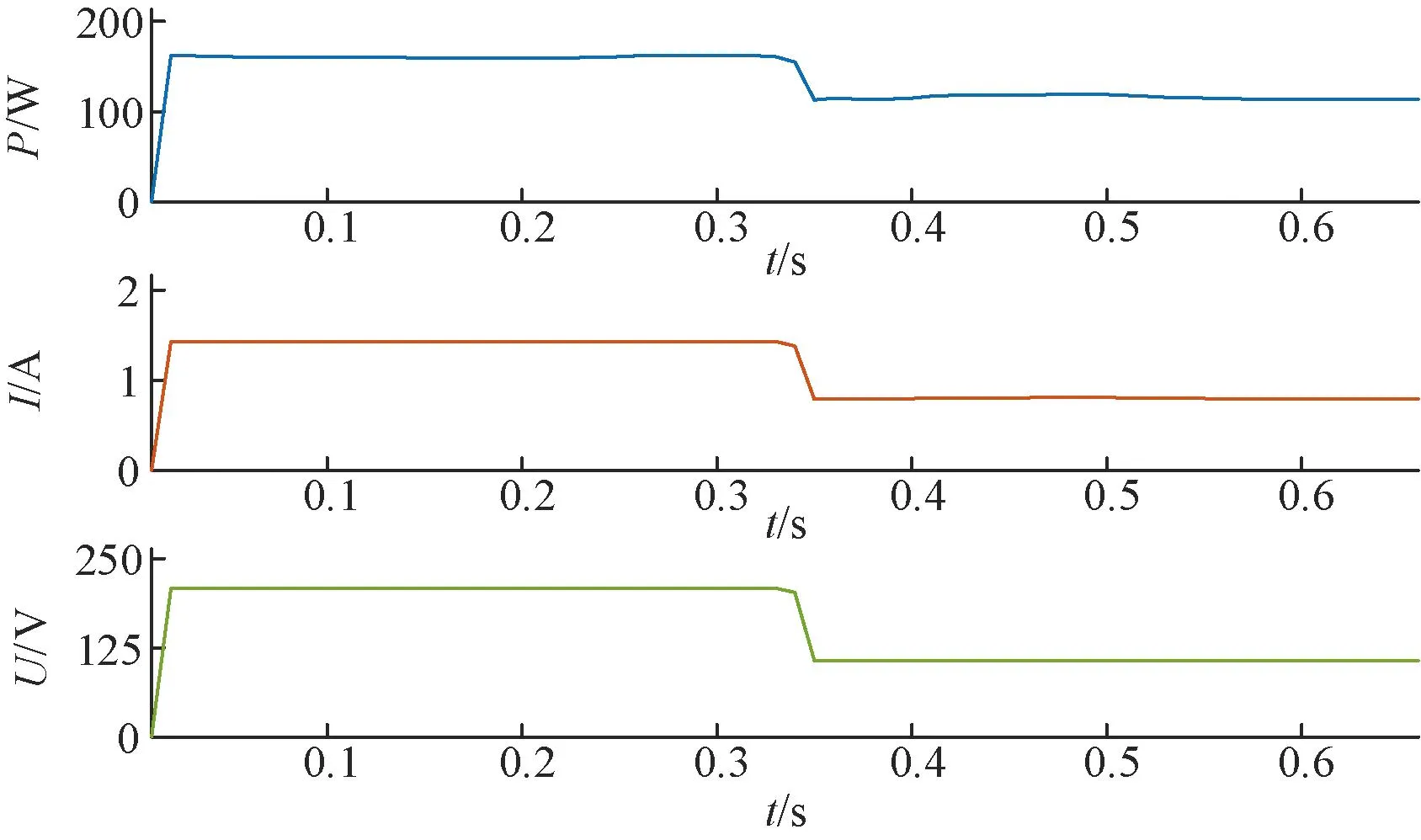
圖11 轉(zhuǎn)速600 r/min時(shí)效率優(yōu)化
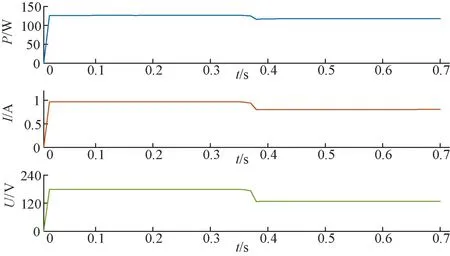
圖12 轉(zhuǎn)速300 r/min時(shí)效率優(yōu)化
轉(zhuǎn)速為600 r/min時(shí),在時(shí)間為0.32 s處加入優(yōu)化算法,電機(jī)功率從165.6 W降低到121.4 W,效率提高了約26.7%。轉(zhuǎn)速為300 r/min時(shí),在時(shí)間在0.37 s處加入優(yōu)化算法,電機(jī)功率從132.5 W降低到103.1 W,效率提高了22.2%。實(shí)驗(yàn)結(jié)果表明,LMC-MPC有效地提升了電機(jī)的運(yùn)行效率。
4 結(jié) 語
本文提出了一種LMC-MPC算法并應(yīng)用于IM效率優(yōu)化。該方案對(duì)傳統(tǒng)效率優(yōu)化控制進(jìn)行了以下幾項(xiàng)改進(jìn):
1)針對(duì)傳統(tǒng)LMC不考慮鐵損和漏感等問題,提出一種綜合考慮各種損耗的LMC模型,實(shí)現(xiàn)了更好的節(jié)能效果。
2)LMC高度依賴模型參數(shù),在面對(duì)復(fù)雜工況時(shí),效率優(yōu)化算法精度將嚴(yán)重下降,提出采用MRAS算法來辨識(shí)定子電阻,仿真結(jié)果表明,所提算法增強(qiáng)了LMC的參數(shù)魯棒性。
3)針對(duì)傳統(tǒng)PI動(dòng)態(tài)性能差的問題,設(shè)計(jì)了一種基于CCS-MPC的電流控制器,實(shí)驗(yàn)結(jié)果表明所提算法能夠提供更高的動(dòng)態(tài)性能。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
甘肅教育(2020年14期)2020-09-11 07:57:42
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
時(shí)代英語·高二(2015年1期)2015-03-16 00:08:11