伺服傳動系統(tǒng)角度跳變電磁干擾問題研究
2024-04-03 14:42:44陳學文王以波柯昌燕
微特電機 2024年3期
陳學文,王以波,柯昌燕
(中國電子科技集團公司第二十九研究所,成都 610036)
0 引 言
隨著伺服傳動系統(tǒng)的快速發(fā)展,電磁兼容(EMC)日益成為一個突出的問題,也引起了眾多研究學者的探究興趣[1-3]。伺服傳動系統(tǒng)在工作過程中既是一個干擾源又是一個敏感設備,實際工作過程中由于其大負載、大功率的特性,容易成為制約整個系統(tǒng)穩(wěn)定工作的因素,對系統(tǒng)可靠性和安全性帶來挑戰(zhàn),電磁兼容問題嚴重時會導致系統(tǒng)工作流程終止[4-6]。
在多干擾因素疊加的場合,如和大功率發(fā)射機共存的機柜、多設備調試的廠房等,伺服傳動系統(tǒng)在自身運行時也會受到周圍電磁場環(huán)境的影響而無法正常工作[7-8]。基于以上考慮,對伺服傳動系統(tǒng)的電磁兼容性能有嚴格要求時,在產品已經(jīng)基本定型的情況下,如何采取最小代價、制定現(xiàn)場處理措施來解決所發(fā)生的電磁干擾(EMI)問題是需要著重考慮的,這對于降低成本、縮短周期有著重要意義。
本文以某型號伺服傳動系統(tǒng)與系統(tǒng)聯(lián)調過程中實際遇到的角度跳變電磁干擾問題為切入點,對可能引起電磁干擾的多種因素進行了分析,逐步排除,最終定位到具體的干擾源并采取對應的現(xiàn)場處理措施,抑制電磁干擾,通過比較抑制措施實施前后的效果,證實了所提出抑制措施的有效性。
1 伺服傳動系統(tǒng)電磁干擾問題分析
1.1 伺服傳動系統(tǒng)的組成
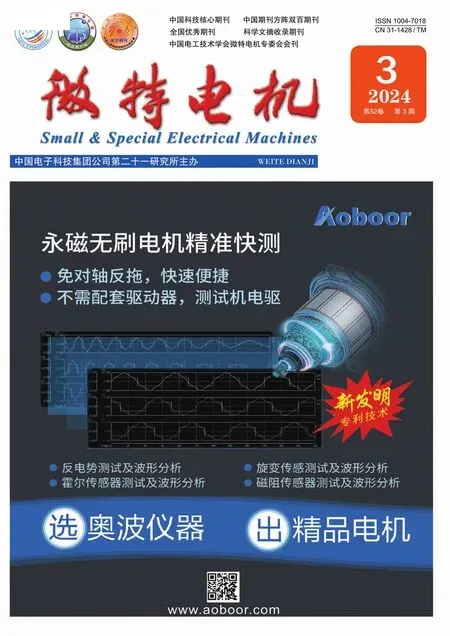
本伺服傳動系統(tǒng)分為伺服部分和傳動部分,伺服部分承擔控制驅動功能,結構形式為金屬機箱,一般安裝于室內機柜中,傳動部分承擔動作執(zhí)行功能,結構形式為傳動座,上方承載天線,外觀分別如圖1(a)和圖1(b)所示。實際使用時兩者通過系統(tǒng)電纜連接,與上位機等通過串口通信。伺服控制驅動分機由伺服控制模塊、伺服驅動器、制動電阻、電源模塊、濾波器、手輪、連接器等組成,前面板有1個數(shù)碼顯示電路,用于顯示當前傳動座角度。傳動座主要包括伺服電機、減速器、電限位裝置、基座等部分。
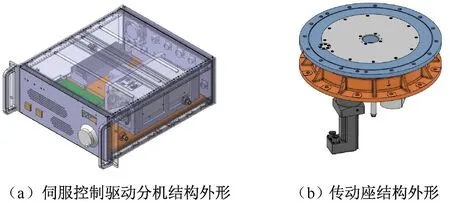
圖1 伺服傳動系統(tǒng)結構外形示意圖
伺服控制驅動分機接收上位機通過串口RS232下發(fā)的動作命令,內部的伺服控制模塊將接收的動作命令轉換為模擬信號輸出給驅動器,驅動器根據(jù)電壓信號的大小計算出脈寬調制驅動電壓的占空比,輸出驅動電壓到電機繞組,完成對電機的速度控制。同時,伺服控制模塊接收傳動座上編碼器的同步時鐘信號,經(jīng)過運算處理得到位置誤差信號,根據(jù)此反饋完成對速度的調節(jié),在到達左、右限位時伺服控制模塊接收低電平信號,控制驅動器驅動傳動座反向運動,實現(xiàn)位置控制。工作期間伺服控制模塊通過RS422串口輸出給數(shù)碼顯示電路進行顯示。圖2為伺服傳動控制系統(tǒng)工作原理圖。
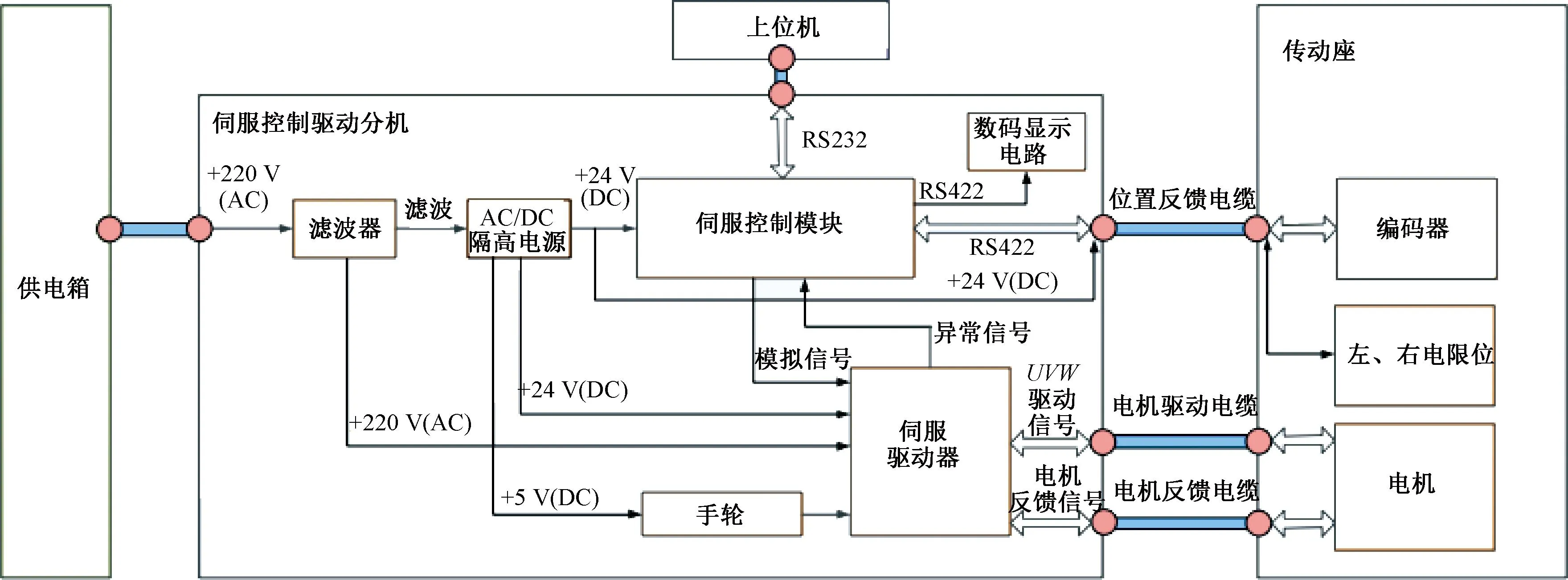
圖2 伺服傳動控制系統(tǒng)工作原理
1.2 伺服傳動系統(tǒng)干擾現(xiàn)象分析
伺服傳動系統(tǒng)的電磁干擾問題發(fā)生于和系統(tǒng)聯(lián)試階段,此時伺服控制驅動分機位于機柜內,安裝位置上方有發(fā)射機等大功率設備。系統(tǒng)供電220 V、未下發(fā)動作指令的情況下,通過串口RS232接收的報文出現(xiàn)角度上報碼值跳變、伺服控制驅動分機前面板數(shù)碼顯示電路角度跳變等異常現(xiàn)象。考慮系統(tǒng)實際使用和校驗,為測試丟包率,去掉狀態(tài)自動上報,改為狀態(tài)查詢上報,發(fā)送狀態(tài)查詢命令,伺服回復狀態(tài)信息。實際測試使用和校驗時,發(fā)送查詢報文10 000條,接收狀態(tài)信息報文7 026條,丟包率為29.74%,嚴重影響了信息傳遞的質量和可靠性,這是系統(tǒng)不能忍受的。
關掉機柜內的發(fā)射機等大功率設備后,角度跳變問題仍然發(fā)生,則電磁干擾問題與發(fā)射機等無關。后續(xù)測試轉臺的動作功能正常,但在以恒定速度轉動時也出現(xiàn)角度值階躍跳變的現(xiàn)象。此問題干擾了系統(tǒng)正常工作,嚴重時可能會導致系統(tǒng)誤判、做出錯誤操作。由于伺服傳動系統(tǒng)在實驗室調試過程中一切正常,未出現(xiàn)此現(xiàn)象,系統(tǒng)接線正確,故認為此現(xiàn)象的原因為電磁干擾。考慮到聯(lián)試時的工作環(huán)境和系統(tǒng)電纜均有所差異,需要進行故障定位及分析,同時采取對應的現(xiàn)場處理措施。
2 伺服傳動系統(tǒng)電磁干擾抑制措施研究
電磁干擾具備三要素[9]:電磁干擾源、耦合途徑和敏感設備。發(fā)生電磁干擾問題可以從這三個因素著手,只要消除其中某一個因素,就能解決 EMC 問題。伺服傳動系統(tǒng)實際運行過程中EMI是客觀存在的,干擾的耦合途徑主要是輻射發(fā)射或者傳導發(fā)射,良好的電磁兼容設計可幫助系統(tǒng)工作得更加穩(wěn)定,但在產品已經(jīng)生產完成的情況下,需要盡可能降低成本、縮短周期,主要措施依賴于制定現(xiàn)場解決辦法,以提升伺服傳動系統(tǒng)的電磁兼容性能,使系統(tǒng)恢復正常工作。
伺服控制驅動分機內和傳動座內的組成都已經(jīng)完成模塊化設計,角度跳變涉及回路為位置環(huán),則敏感設備可以確定為和系統(tǒng)通訊的伺服控制模塊或上報角度源碼的編碼器,干擾源主要考慮分機內用于給模塊供電的AC/DC電源、伺服驅動器、傳動座內電機,耦合途徑主要考慮分機內電纜、分機機殼、機柜、伺服控制驅動分機和傳動座之間的3根電纜、空氣等。
2.1 電磁干擾抑制常用技術措施
如圖3所示,電磁干擾控制技術可分為以下五類[10-12],下面主要從這五個方面來討論本伺服傳動系統(tǒng)設計階段電磁干擾的抑制技術以及存在的問題。
圖3 電磁干擾控制技術分類
1)電路和電子元器件。此部分對于電磁干擾的影響,在前期設計階段應充分考慮,伺服控制模塊為自研模塊,電路設計時充分考慮外部信號的干擾抑制,具備電源及I/O接口濾波電路,所選擇電子元器件符合國家標準,采用多層電路板設計以減小電源、地的寄生電感,做到了強、弱電分區(qū),數(shù)字、模擬信號隔離,布線間距遵循20H和3W規(guī)則,避免電場干擾和減少串擾。伺服驅動器接口電路設計有濾波電容,可將電路中的高頻噪聲濾除,從而保證信號的穩(wěn)定性和可靠性。編碼器選用外部廠家成熟產品,以RS422標準輸出,控制模塊發(fā)送一串時鐘脈沖鏈,絕對值編碼器響應相應的位置數(shù)據(jù)值。其由旋轉變壓器、解算電路和接口電路組成,解算電路實現(xiàn)數(shù)字量轉換,由接口電路輸出數(shù)字角度,但接口電路缺乏有效的濾波設計。
2)濾波。濾波是指在設備電源或信號進口端采取措施進行噪聲濾除,以減少和釋放干擾,可分為硬件濾波及軟件濾波。電源線中諧波中頻率范圍很廣,從10 kHz~100 MHz均有,共模干擾和差模干擾均較大,需要采用濾波器濾波。所選取的EMI濾波器具備優(yōu)良的共模和差模插入損耗特性,能夠抑制尖峰、瞬態(tài)干擾,減少高壓電源與控制電路的相互干擾。軟件濾波通過對編碼器上報角度碼值實現(xiàn)平滑濾波。AC/DC電源將+220 V(AC)轉換為+24 V(DC)直接給伺服控制模塊和編碼器供電,+24 V(DC)電源輸出無濾波器,存在的高頻噪聲可能導致電源上的干擾直接傳導出機箱。
3)屏蔽。屏蔽是指在干擾或被干擾設備之間形成物理的電磁護層,切斷或減弱干擾的電氣和空間的傳遞。伺服控制驅動分機整機為鋁合金金屬機箱,上下殼體縫隙有導電橡膠條,顯示屏為屏蔽玻璃且與機箱搭接良好,連接器通孔設計為圓形,降低最大開孔尺寸,降低輻射干擾,最大限度形成內外屏蔽保護,提升其內外電磁兼容性。伺服驅動器殼體采用鋁合金整體成型,殼體邊沿圓弧過渡,避免尖角形成發(fā)射天線,接縫和接插件縫隙的設計盡可能小,通風孔加裝了蜂窩結構的通風網(wǎng),增強對高頻信號的衰減。
4)布線。伺服控制驅動分機內部導線均采用屏蔽導線及屏蔽雙絞線,屏蔽層完全包住電纜,并良好接地。分機內部EMI濾波器和驅動器之間距離小于30 cm,電源線與信號線分開走線,避免伺服驅動器的電磁干擾耦合到I/O線纜。驅動器輸出的電機驅動線上套磁環(huán),防止高頻量的發(fā)射。分機和傳動座之間的電纜采用高編織密度的防波套,但是系統(tǒng)電纜編碼器采用普通雙絞線,為提高電磁兼容性應采用屏蔽雙絞線。
5)接地。接地是將干擾源接地以降低對信號的干擾,或將敏感設備接地以將部分干擾引至系統(tǒng)整體以減少對敏感設備的影響。分機內濾波器、AC/DC隔離電源、伺服控制模塊、伺服驅動器與機箱側面或底部接觸,分機自帶接地柱,采用一點接地的方法與機柜接地柱連接共地。傳動座內電機外殼同樣接地,使得接地電阻和電感較小,防止電磁輻射泄漏,避免引入額外的干擾。
2.2 伺服傳動系統(tǒng)干擾抑制措施及效果測試
根據(jù)以上五個方面的分析,為確定敏感設備,使用軟件仿真模式觀察編碼器上報的角度源碼,發(fā)現(xiàn)存在不連續(xù)跳變現(xiàn)象,敏感設備為編碼器可能性極大。為進一步確認,逐步拔掉伺服控制驅動分機和傳動座之間的3根線,發(fā)現(xiàn)僅拔掉位置反饋電纜時,角度跳變現(xiàn)象停止。使用調試用位置反饋電纜和轉臺上的編碼器連接,無角度跳變現(xiàn)象,即可確認敏感設備為編碼器。位置反饋電纜中包含AC/DC輸出的+24 V(DC)供電及地線2根、RS422信號及地線5根,左、右電限位信號反饋線和地線3根,則干擾來源于伺服控制驅動分機,并且最大可能來源于AC/DC電源。AC/DC電源為開關電源,通過將市電整流濾波后直接將交流電變?yōu)橹绷麟?再在高頻震蕩電路的作用下,用開關管控制電流的通斷,形成高頻脈沖電流,在電感的幫助下,輸出穩(wěn)定的低壓直流電。開關產生的方波富有高頻諧波,能通過寄生電容形成的通路傳播。系統(tǒng)用位置反饋電纜和調試用位置反饋電纜區(qū)別在于調試用位置反饋電纜無防波套,如圖4所示,由此可判斷電磁干擾為傳導干擾,干擾耦合途徑是位置反饋電纜的金屬防波套。
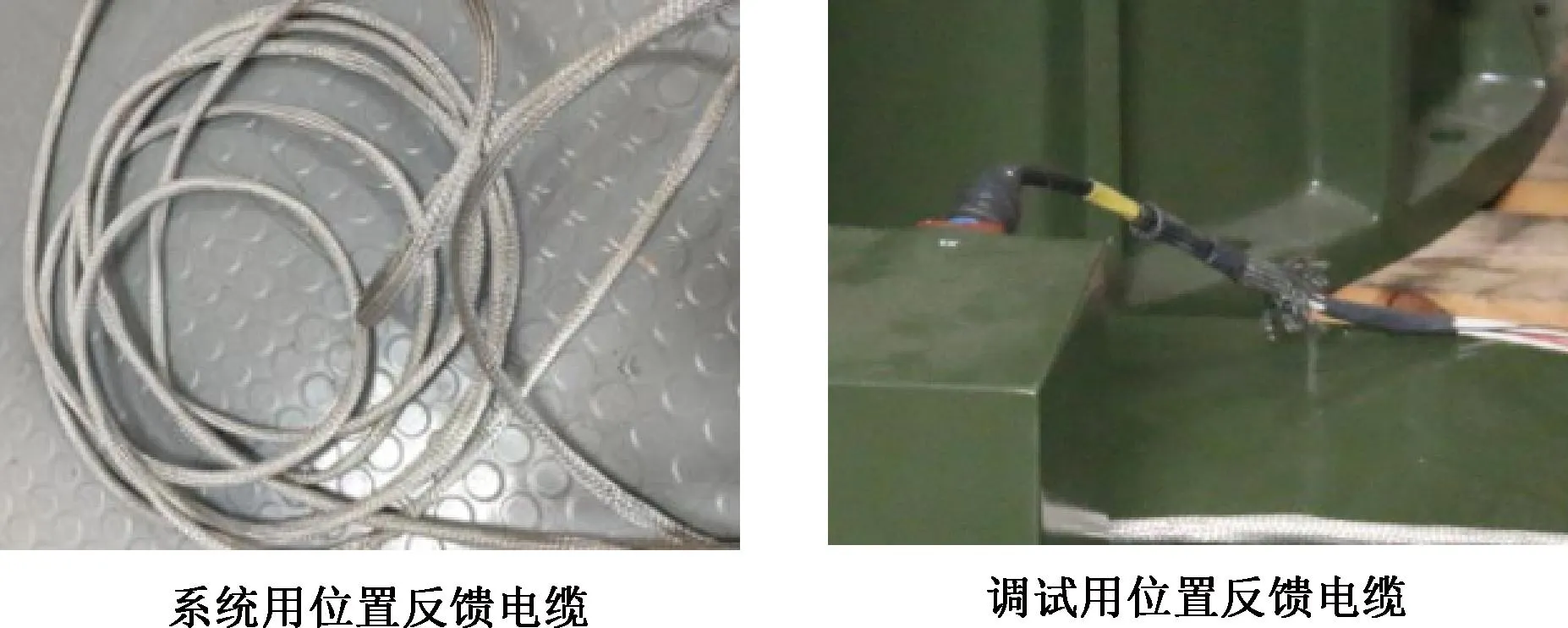
圖4 位置反饋電纜區(qū)別
在系統(tǒng)要求改動量盡可能小、更改周期盡可能短的情況下,不考慮對AC/DC電源和編碼器這兩者都為外部廠家貨架產品進行更改。而考慮在耦合途徑上減小電磁干擾,其中AC/DC電源輸出端增加濾波器,涉及到濾波器定制,機箱內安裝結構變化及分機內重新走線,更改較為繁瑣。同時,電磁干擾存在多種因素的疊加,因此,從屏蔽、接地、濾波三個方向采取電磁干擾抑制措施。
1)屏蔽。系統(tǒng)用位置反饋電纜內部RS422信號線由雙絞線替換為屏蔽雙絞線,屏蔽層選擇具有良好電磁屏蔽效能的鍍錫銅屏蔽材料,增強抗干擾性能,如圖5所示。經(jīng)測試,通信效果沒有改善,仍存在角度跳變。
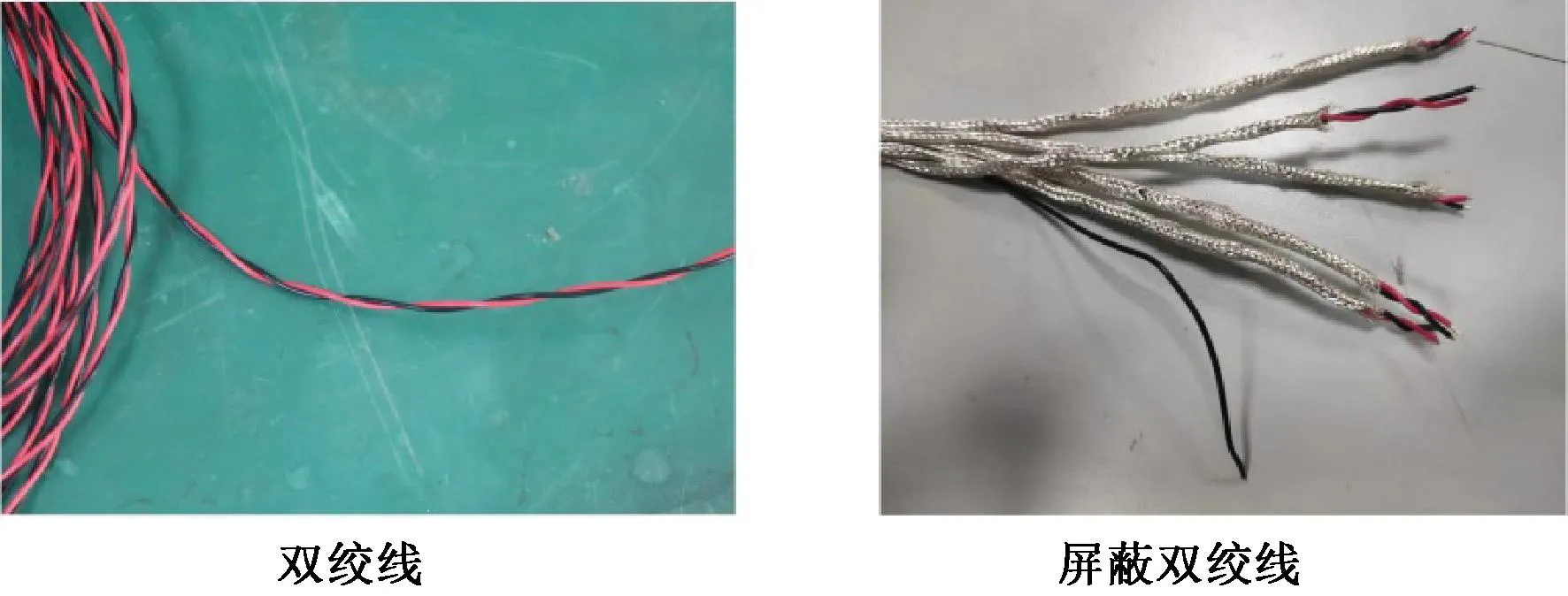
圖5 雙絞線替換前后
2)接地。理想狀態(tài)下伺服傳動系統(tǒng)各個組成部分的電阻都應為零。但在實際工作中,伺服傳動系統(tǒng)各個部分的電阻不可能為零,這會形成電勢差,差值越大,相互之間的影響也就越大。而良好的接地設計可以有效減小電阻,從而減小電勢差,避免積累的靜電對伺服傳動系統(tǒng)造成損害及干擾。為簡化電子設備內的電路結構,給易受干擾的線路增加屏蔽,降低接地阻抗及減少地線間的雜散電感和分布電容造成電路間的相互耦合,伺服控制驅動分機后面板連接器處裸露導線全部使用金屬屏蔽絲網(wǎng)包裹,與分機機箱后面板單點接地,減小了回路面積,增強了屏蔽性能,如圖6所示。經(jīng)測試,通信效果沒有改善,仍存在角度跳變。

圖6 金屬絲網(wǎng)加裝前后
3)濾波。共模噪聲模型如圖7所示,由于高頻信號與地之間通過寄生電容形成回路,故在原本的信號回路中多了一個等大同向的共模電流。
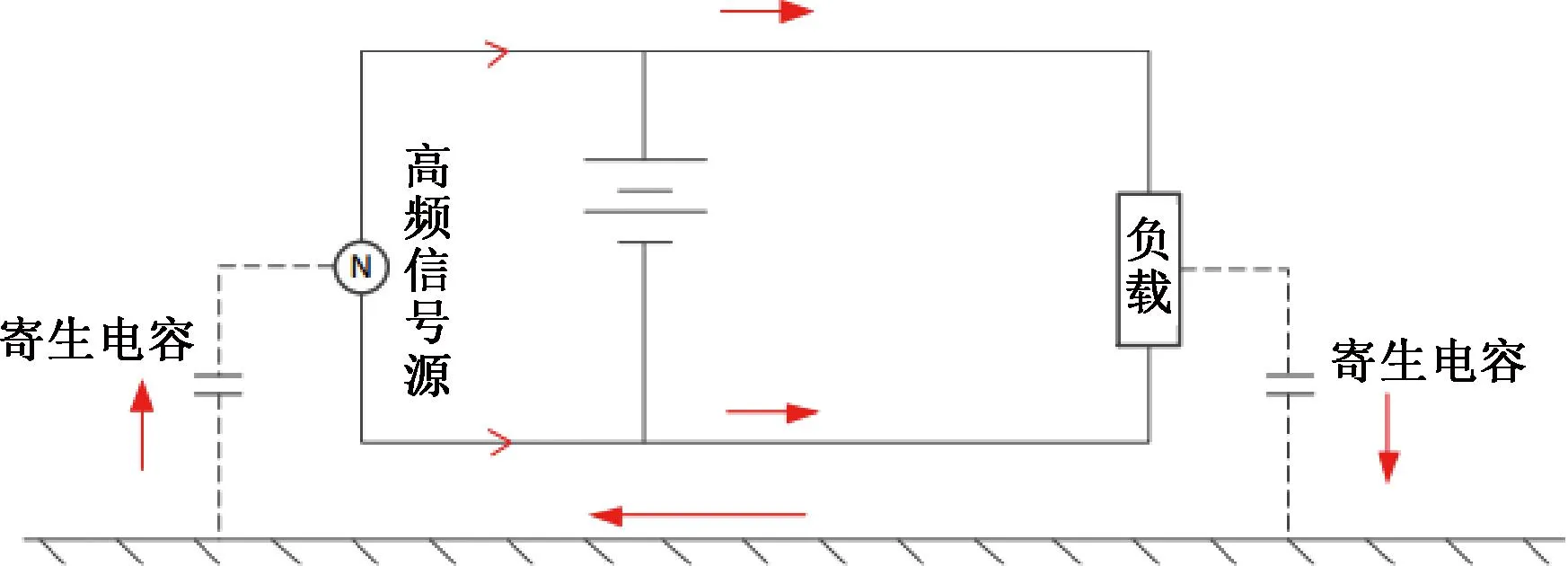
圖7 共模噪聲模型
使用EMI吸收元件來消耗共模電流是一種有效的決策,EMI吸收元件是有耗器件,在組帶內吸收高頻噪聲的能量并轉化為熱量散發(fā),起到濾波作用,可用于抑制電源線、信號線上的噪聲及尖峰干擾,解決DSP等數(shù)字電路控制系統(tǒng)由電磁干擾引起的數(shù)據(jù)錯誤等問題。最常見的吸收元件是由鐵、鎳、鋅氧化物混合而成的鎳鋅鐵氧體磁環(huán),具有很高的電阻率和磁導率,其等效為電感和電阻的串聯(lián),但只對單線加磁環(huán)無法有效抑制共模噪聲。考慮對AC/DC電源+24 V的2根電源線各加裝磁環(huán),如圖8(a)所示,要求磁環(huán)在高頻段有高阻抗,選擇磁環(huán)頻率阻抗特性,見圖8(b),其在25~100 MHz頻段單匝阻抗在100~200 Ω左右。分機內加裝磁環(huán)時每個繞3圈,增加在線路中的高頻阻抗,見圖9,加裝磁環(huán)前后測試分機內AC/DC電源輸出端的頻譜圖如圖10所示。
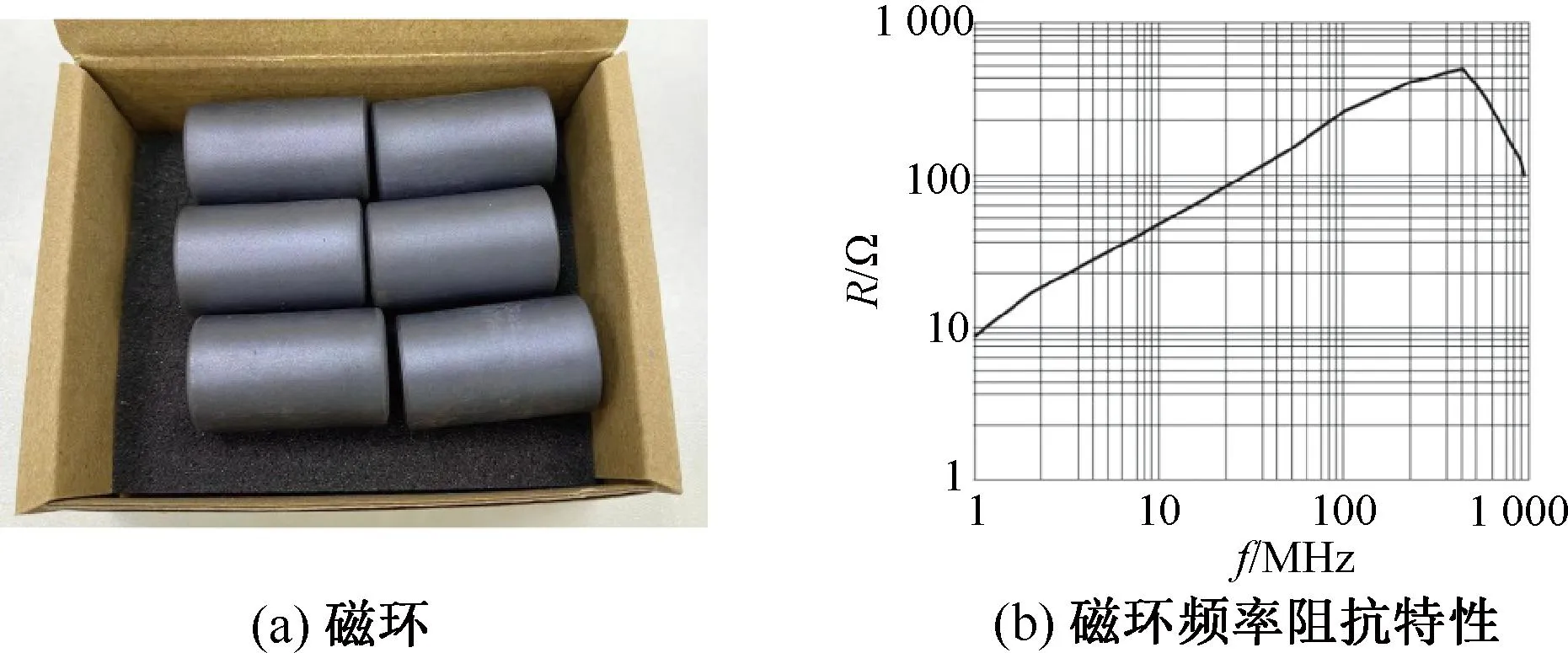
圖8 磁環(huán)阻抗特性
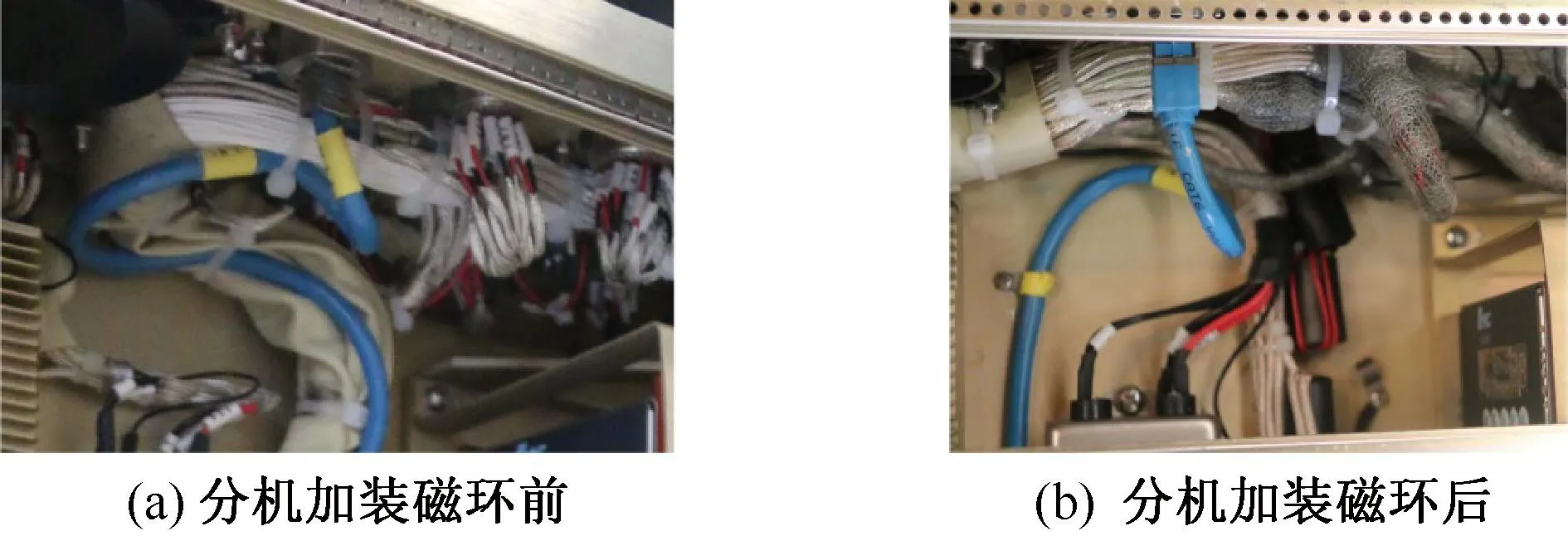
圖9 分機加裝磁環(huán)
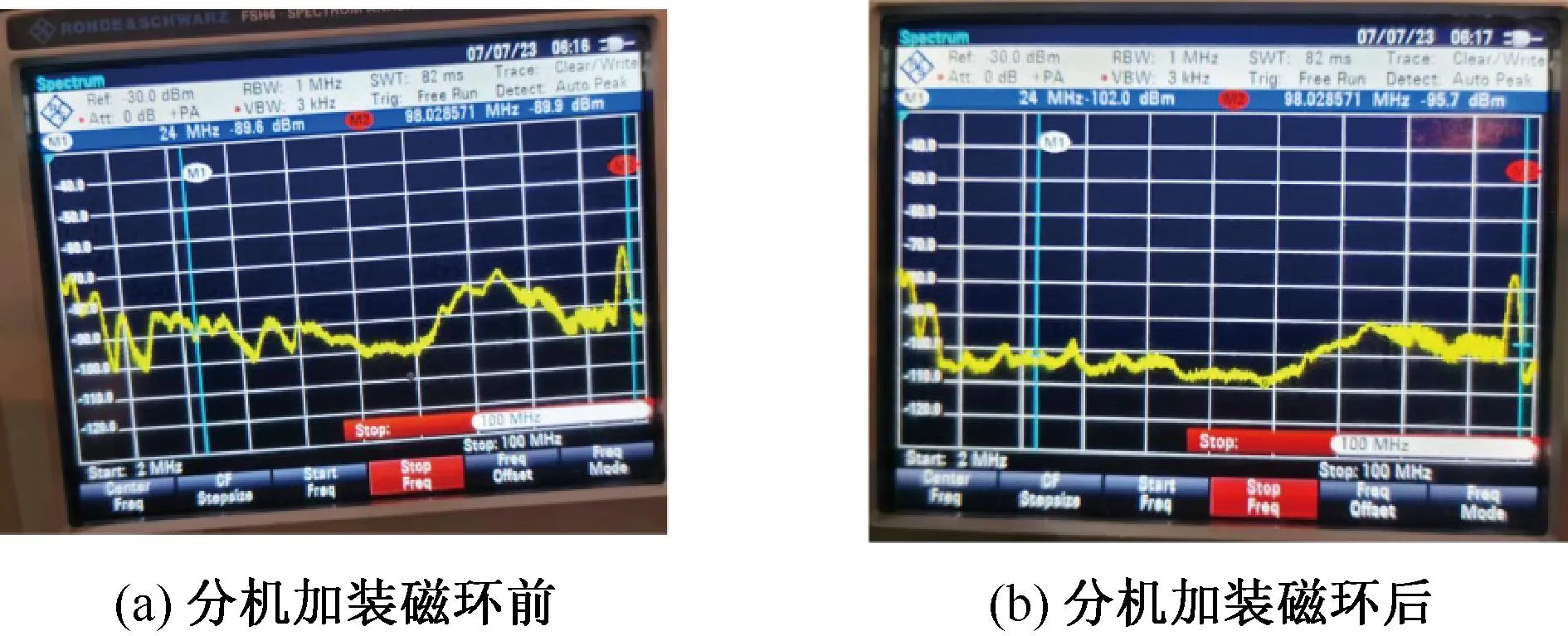
圖10 加裝磁環(huán)前后AC/DC電源輸出端的頻譜圖
屏蔽和接地措施實施之后,分別進行測試,角度跳變現(xiàn)象沒有明顯改善,濾波措施加入磁環(huán)之后,1~100 MHz之間的高頻噪聲降低了5.8~12.4 dB(A),角度跳變現(xiàn)象消失。使用和校驗實際測試10 000幀狀態(tài)報文,接收狀態(tài)信息報文10 000幀,丟包率為0,滿足系統(tǒng)使用要求。因此,電磁干擾是因為AC/DC電源模塊發(fā)射的高頻噪聲直接通過位置反饋電纜傳導出機箱,在編碼器無接口濾波電路的情況下,直接注入了編碼器,導致數(shù)據(jù)傳輸錯誤,通過加入磁環(huán),抑制了電磁干擾,使問題得到解決。
3 結 語
本文以伺服傳動系統(tǒng)中遇到的角度跳變電磁干擾問題為研究對象,探究電路和元器件、濾波、屏蔽、布線、接地等多種因素的影響,最終定位為AC/DC電源輸出的+24 V直流高頻噪聲對編碼器差分信號的影響,在不大范圍改變現(xiàn)有設計的情況下,使用兩個磁環(huán)對電源進行濾波,1~100 MHz范圍的高頻噪聲下降了5.8~12.4 dB(A),消除了高頻噪聲對編碼器差分信號的影響,采集的編碼器角度數(shù)據(jù)恢復正常,驗證了該伺服傳動系統(tǒng)所采取的抑制措施的有效性,可為類似情況下的電磁兼容問題提供借鑒,也提醒設計師在前期設計階段需考慮直流電源高頻噪聲對信號的影響。