改進的自適應擴展卡爾曼濾波雷達目標跟蹤算法*
2024-04-16 12:17:58楊遵立張從勝
火力與指揮控制 2024年3期
楊遵立,張 衡,呂 偉,余 娟,張從勝
(空軍預警學院,武漢 430019)
0 引言
雷達目標跟蹤是雷達數據處理中非常關鍵的一環,依據獲取的雷達目標點跡,進行航跡起始、關聯、濾波以及預測處理,實現對目標運動的實時跟蹤[1-2]。標準卡爾曼濾波算法是在狀態空間上的線性高斯濾波算法[3],在雷達目標跟蹤理論研究中得到廣泛關注[4]。當機動目標出現非線性運動場景時,目標真實狀態與濾波模型不匹配,卡爾曼濾波算法會出現跟蹤精度下降,出現濾波發散甚至跟蹤丟失的問題。因此,國內外學者進行研究提出了一些改進算法,其中有代表性的是擴展卡爾曼濾波(EKF)算法[5-6]。
EKF 算法對非線性系統濾波函數進行泰勒一階線性展開式并忽略高階項,將非線性系統模型轉化為一個近似線性模型,從而對卡爾曼濾波算法進行修正[6]。該方法簡單計算量小,可較好對線性、非線性機動目標運動狀態進行預測跟蹤。文獻[7]中提出一種改進EKF 算法,通過實時計算新息方差自適應調整濾波增益,從而進行目標跟蹤。
在非線性目標場景中,當系統運動模型與噪聲模型失配,系統積累誤差較大時,EKF 濾波算法也存在濾波效果不佳或出現濾波發散。反向傳播(BP)神經網絡能夠自適應學習,具備良好的非線性映射能力,廣泛應用于雷達數據處理場景中[8-9],本文采用BP 神經網絡對EKF 算法進行自適應修正,同時,根據噪聲情況,引入可調更新因子,采用位置誤差最小化的優化模型自適應地對預測位置信息進行二次優化,從而提高目標位置跟蹤精度和穩定度。
1 EKF 和BP 神經網絡算法原理
1.1 EKF 濾波算法原理
常用的雷達目標運動模型有勻速模型(CV)和勻加速模型(CA),本文以該兩種模型為例考慮目標跟蹤場景,1 個目標進行勻加速運動,另外1 個目標進行勻速運動。勻速或勻加速直線運動目標狀態方程和測量方程可表示如下[1]:
其中,X(k)為k 時刻的目標狀態;F 為狀態轉移矩陣;G 為過程噪聲分布矩陣;Z(k)為測量矩陣;H 為觀測矩陣,v(k)和w(k)分別是系統的過程噪聲和測量噪聲,兩個噪聲相互獨立且服從均值為0 的高斯分布,方差分別為Q 和R,T 為系統采樣間隔。
式(2)中測量矩陣Z(k)表示如下:
其中,(x0,y0)為觀測點的坐標。
EKF 濾波使用展開一階泰勒級數進行近似,從而近似變換為線性系統進行濾波處理。EKF 濾波基本公式如下[7]:
觀測矩陣H 為非線性函數h(X(k))的一階泰勒的雅克比矩陣,表示如下:
k+1 時刻新息u(k+1)、濾波增益K(k+1)和協方差矩陣P(k+1|k+1)更新為:
文獻[7]中噪聲方差R 隨時間分段變化,在長度L 連續區間內可得改進濾波增益為:
上述這些公式完成了EKF 濾波更新過程,只要給定狀態初始值和協方差初始值P(1|1),即可進行全部時刻迭代估計。
1.2 BP 神經網絡算法原理
BP 神經網絡學習過程分信號正向傳遞和誤差逆向傳遞過程。以3 層的BP 神經網絡為例,設各層參數分別為:輸入層中輸入x,神經元個數m;隱含層中輸出a,神經元個數s,激活函數f1;輸出層中輸出o,期望輸出?,神經元個數n,激活函數f2[8-9]。
隱含層第i 個神經元輸出ai,輸出層第k 個神經元的輸出ok,表示如下:
BP 神經網絡輸出誤差定義如下:
經過信息正向傳遞可以求出輸出值,當誤差滿足精度要求時,結束學習;不滿足精度要求時,便通過逆向傳播誤差值,不斷調整權值ω,使誤差E 達到最小。設η 是神經網絡學習率,調整后權重值和如下:
2 改進自適應EKF 濾波算法
2.1 BP 神經網絡自適應修正EKF 濾波
當系統運動模型與噪聲模型失配,系統積累誤差較大時,EKF 濾波算法也存在濾波效果不佳或出現濾波發散。由于BP 神經網絡能夠自適應學習,具備良好的非線性映射能力[8-9],本文采用BP 神經網絡來輔助修正擴展卡爾曼濾波的結果,減小EKF 濾波誤差,從而提高運動目標跟蹤精度。
本文構建了3 層BP 神經網絡,包括輸入層、隱含層和輸出層,如圖1 所示。采用的BP 神經網絡結構中,輸入層參數包括更新信息,EKF 預測參數,濾波增益K(k+1),測量參數Z(k+1),輸出層節點為輸出預測的位置信息。隱含層節點數對BP 神經網絡性能影響巨大,隱含層節點數增多可提高網絡性能,但也會延長訓練時間,隱含層節點數用式(19)確定:
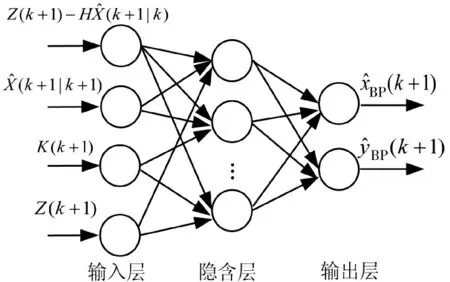
圖1 BP 神經網絡結構Fig.1 BP neural network architecture
式中,M 和N 分別為輸入層和輸出層節點數;a 是[0,10]之間的常數。
BP 神經網絡,給定誤差函數e,設定最大學習次數P 與精度ε,選用Tan-Sigmoid、log-sigmoid、線性purelin 函數分別為輸入層、隱含層和輸出層傳遞函數,采用L-M 算法進行訓練,反復訓練使得網絡均方誤差最小。
測量值Z(k+1)在絕對坐標系下x 和y 軸的測量信息分量xZ(k+1)和yZ(k+1)分別為:
其中,ρ(k+1)和θ(k+1)分別為k+1 時刻測量值Z(k+1)在極坐標下的長度和角度分量,其中,
依據目標運動規律,目標位置存在一定的偏差范圍,不論是EKF 算法還是BP 神經網絡算法的一些預測值可能存在較大偏差,需要對其進行一定的修正,這里假設在絕對坐標系下系統最大的偏差范圍為δ,以測量位置信息為基準,k+1 時刻EKF 預測坐標和滿足如下條件:
不滿足式(19)按如下進行更新修正:
類似的,以修正后的EKF 預測值為基準,BP 神經網絡預測值也滿足如下條件:
2.2 優化模型自適應選擇最佳預測信息
BP 神經網絡算法是一種局部最優算法,結果可能不最優的,需要確定最優的預測位置結果。一種基于實際噪聲情況可調更新因子,類似動態雜波圖的方式自適應產生該更新因子,可根據噪聲情況自適應獲得,用于EKF 和BP 神經網絡映射的位置預測值的加權處理,處理結果可提供進行最優化選擇。
k+1 時刻,EKF 預測和測量值的第1 綜合加權值坐標,表示如下:
BP 神經網絡映射預測和EKF 預測第2 綜合加權值坐標表示如下:
為了獲得最佳的位置預測信息,本文基于誤差最小化的優化模型,從上述EKF 預測值、BP 神經網絡預測值以及加權值中,自適應獲得最優位置預測信息和。從這4 個預測值中自適應選擇最優值;從這4 個預測值中自適應選擇最優值,優化模型表示如下:
本文所提算法如算法1 和圖2 所示。
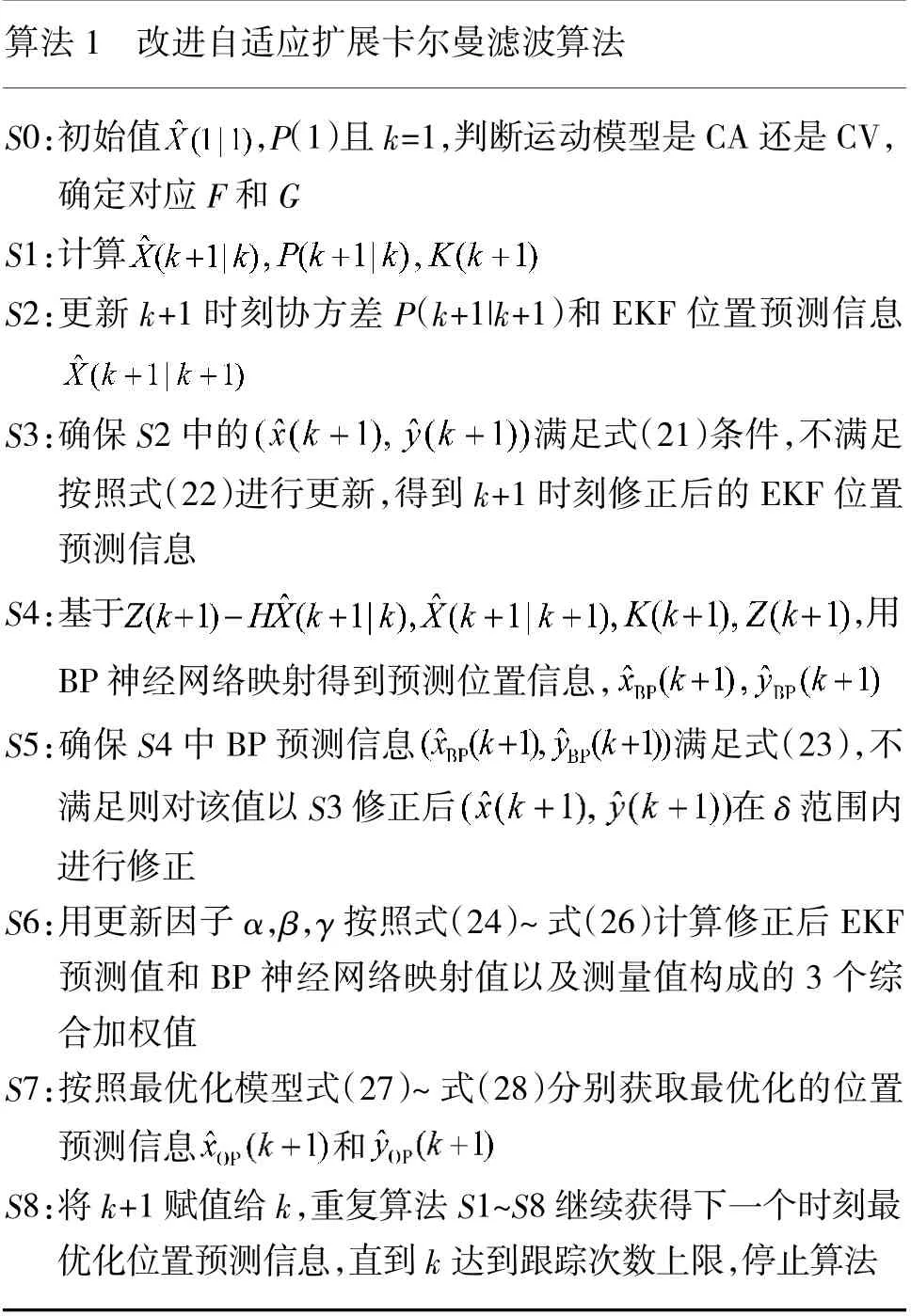
images/BZ_25_1288_427_1947_464.pngS0:初始值images/BZ_25_1454_523_1551_565.png,P(1)且k=1,判斷運動模型是CA 還是CV,確定對應F 和G S1:計算images/BZ_25_1418_646_1854_692.pngS2:更新k+1 時刻協方差P(k+1|k+1)和EKF 位置預測信息images/BZ_25_1343_772_1547_817.pngS3:確保S2 中的images/BZ_25_1548_839_1849_884.png滿足式(21)條件,不滿足按照式(22)進行更新,得到k+1 時刻修正后的EKF 位置預測信息S4:基于images/BZ_25_1413_1024_2188_1078.png,用BP 神經網絡映射得到預測位置信息,images/BZ_25_1935_1100_2218_1146.pngS5:確保S4 中BP 預測信息images/BZ_25_1725_1168_1997_1213.png滿足式(23),不滿足則對該值以S3 修正后images/BZ_25_1768_1235_2059_1279.png在δ 范圍內進行修正S6:用更新因子α,β,γ 按照式(24)~式(26)計算修正后EKF預測值和BP 神經網絡映射值以及測量值構成的3 個綜合加權值S7:按照最優化模型式(27)~式(28)分別獲取最優化的位置預測信息images/BZ_25_1492_1596_1635_1640.png和images/BZ_25_1672_1596_1807_1640.pngS8:將k+1 賦值給k,重復算法S1~S8 繼續獲得下一個時刻最優化位置預測信息,直到k 達到跟蹤次數上限,停止算法
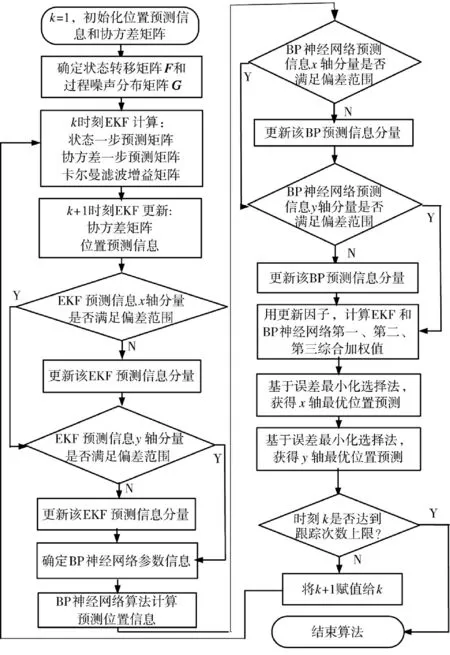
圖2 本文提出算法的流程圖Fig.2 The flow chart of the proposed algorithm
3 仿真分析
基于CA 和CV 運動模型二維平面坐標,通過仿真實現本文基于BP 神經網絡修正和優化的自適應擴展卡爾曼濾波算法,其中,噪聲參數設定是一個變化范圍,分噪聲干擾大和干擾小的場景。仿真參數如表1 所示。
圖3 和圖4 是在噪聲干擾較大時CA 和CV 模型下,仿真出的本算法預測的目標在X 和Y 軸軌跡曲線,前8 個點文獻[7]的EKF 預測作為BP 神經網絡輸入,從第9 個點才是所提自適應BP-EKF 預測修正值。在干擾噪聲較大場景下,不論CA 還是CV 場景,本算法對文獻[7]中改進EKF 算法有一定性能提升,可比較準確進行機動目標位置預測。
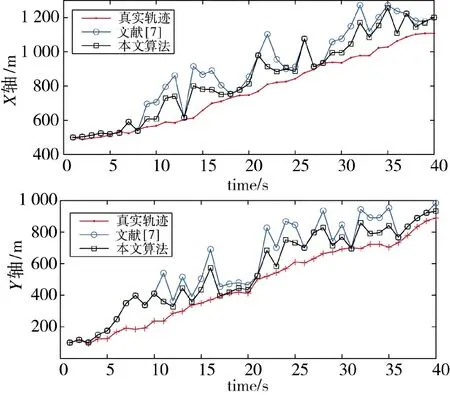
圖3 噪聲干擾較大時,CA 場景預測軌跡曲線Fig.3 Prediction trajectory curve in CA scene with stronger noise interference
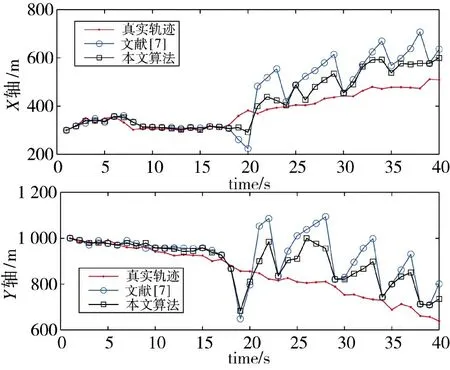
圖4 噪聲干擾較大時,CV 場景預測軌跡曲線Fig.4 Prediction trajectory curve in CV scene with stronger noise interference
圖5 和圖6 是在噪聲干擾較小時,CA 和CV模型下仿真出的預測目標軌跡曲線,此時本算法預測與文獻[7]中算法結果相近,都可較好地進行目標位置預測,佐證本算法是在噪聲較大,與系統模型不匹配場景下,可對目標位置信息的預測有較好的改善。
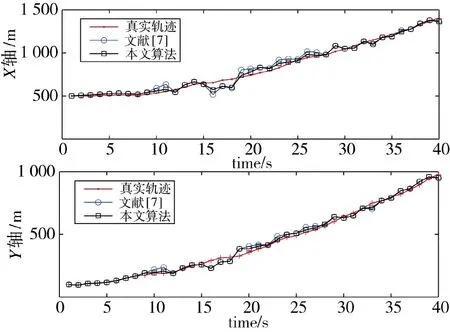
圖5 噪聲較小時,CA 模型預測軌跡曲線Fig.5 Prediction trajectory curve of CA model with weaker noise interference

圖6 噪聲較小時,CV 模型預測軌跡曲線Fig.6 Prediction trajectory curve of CV model with weaker noise interference
目標跟蹤精度衡量的標準是均方根誤差RMSE,設M 為蒙特卡羅仿真次數,Rx(k)和Ry(k)為x 軸和y 軸在k 時刻的均方根誤差,xi(k)和yi(k)為第i 次蒙泰卡羅仿真目標在k 時刻x 軸和y 軸位置真實值,和分別為第i 次蒙泰卡羅仿真目標在k 時刻x 軸和y 軸的預測值。RMSE 表示如下:
圖7 和圖8 分別為CA 和CV 模型下噪聲干擾較大時,仿真的均方根誤差RMSE 曲線圖,經過50次蒙泰卡羅仿真,可看到本算法比文獻[7]中改進EKF 算法均方根誤差低很多,濾波誤差精度和穩定度得到提升。

圖7 CA 模型下預測的濾波誤差曲線Fig.7 Filter error curve of CA model
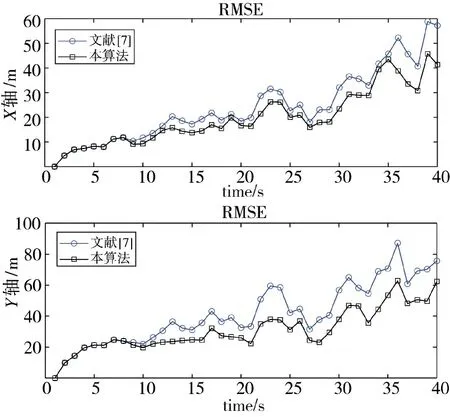
圖8 CV 模型下預測的濾波誤差曲線Fig.8 Filter error curve of CV model
4 結論
本文提出了一種基于BP 神經網絡修正和優化的自適應的EKF 算法進行雷達目標跟蹤,根據噪聲影響情況,使用可調更新因子進EKF 預測位置信息、測量信息和BP-EKF 預測信息值的權重處理,并基于優化模型選擇最優的位置預測信息。仿真分析表明,本算法可以減小濾波目標跟蹤預測的誤差,提高目標跟蹤的濾波精度和穩定度。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中華手工(2017年2期)2017-06-06 23:00:31
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
中外會展(2014年4期)2014-11-27 07:46:46
中學數學雜志(初中版)(2006年1期)2006-12-29 00:00:00
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
