一種紅外經(jīng)緯儀-雷達引導方法的設計與研究*
2024-04-16 12:19:00遲明祎陳爽爽魏炳捷王家永
火力與指揮控制 2024年3期
遲明祎,陳爽爽,魏炳捷,王家永,周 磊
(解放軍63861 部隊,吉林 白城 137001)
0 引言
光學紅外經(jīng)緯儀和彈道雷達都是重要的靶場測量設備,主要用于各類導彈、火箭彈外彈道測試測量任務。光電經(jīng)緯儀具有高精度、寬視場和多目標跟蹤識別等優(yōu)勢[1-2],目標出炮口即跟蹤,但是隨著目標飛行距離漸遠、火焰漸弱或云層遮擋,目標在經(jīng)緯儀視場中的成像質(zhì)量逐漸變低,自動跟蹤和手動跟蹤均難以辨識,故經(jīng)緯儀的探測距離有限[3-4],主要用于主動段坐標測量。雷達測量系統(tǒng)主動段因地表雜波影響、脈沖反應時間不夠、布站遠作用距離較長等因素的制約,通常在目標飛行達到一定高度以后才能捕獲目標[5],與光學經(jīng)緯儀相比,雷達系統(tǒng)定位精度略低[4],但跟蹤距離遠,所以彈道雷達主要用于中后段坐標測量。針對上述問題,本文提出一種經(jīng)緯儀-雷達協(xié)同跟蹤測量策略,即目標出離主動段由雙側布站的兩套經(jīng)緯儀自動跟蹤,實時粗略解算目標空間位置,通過通訊鏈路發(fā)送至雷達控制程序,根據(jù)目標空間坐標和雷達站址,實時解算出雷達照射數(shù)據(jù):方位、俯仰和距離(A,E,R)引導雷達,實現(xiàn)雷達在目標出離之后短時間內(nèi)即捕獲目標,增長雷達有效數(shù)據(jù)段長度。其工作原理如圖1所示。
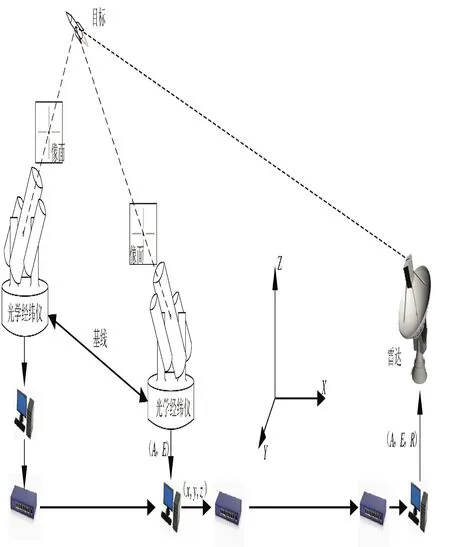
圖1 經(jīng)緯儀-雷達引導示意圖Fig.1 Schematic diagram of theodolite-radar guidance
1 傳統(tǒng)的經(jīng)緯儀事后交會
經(jīng)緯儀對空中目標的坐標交會解算通常在事后進行。在目標提取過程中,需要疊加兩個因素:1)經(jīng)緯儀的指向值,即經(jīng)緯儀視軸對空角度值(方位和俯仰)(A,E);2)目標的像面坐標(x,y)換算成目標亮度中心偏離經(jīng)緯儀視軸的角度值。經(jīng)緯儀具有一定的視場角,目標并未在經(jīng)緯儀視軸上(即視場中心)成像,所以需要通過目標提取解算出目標偏離經(jīng)緯儀視軸的角度值。經(jīng)緯儀視軸的角度與目標偏離視軸的角度二者疊加即得到目標的實測角度,如圖2 所示。
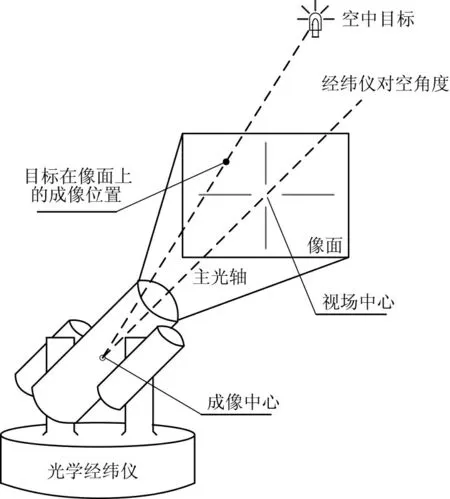
圖2 目標視場成像示意圖Fig.2 Schematic diagram of imaging of target field of view
而像面坐標提取通常采用圖像細分方法[6-7],如圖3、下頁圖4 所示,目標在畫面中占有若干個像素,像素灰度值的不同決定該像素參與目標提取計算的權重,最后得到綜合了多個不同灰度值像素點的目標角度值,從而達到較高的提取精度。
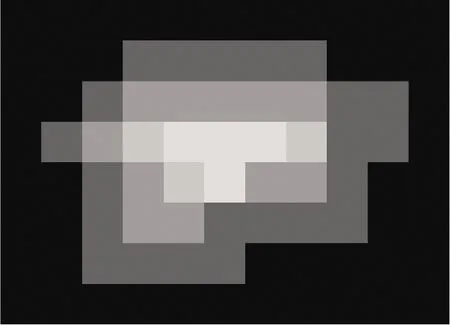
圖3 經(jīng)緯儀對某亮目標拍攝像素圖Fig.3 Pixel map of a light target shot by theodolite

圖4 像面提取中參與計算的像素點Fig.4 Pixel points of calculation during image extraction
在已知經(jīng)緯儀視軸角度(AZX,EZX)和目標的像面坐標(x,y),可通過式(1)計算目標相對于經(jīng)緯儀成像中心的相對角度位置,即經(jīng)緯儀對目標的測角值[1,8],為:
其中,α 為經(jīng)緯儀方位測角值;β 為經(jīng)緯儀高低測角值;x 為水平方向像面坐標;y 為垂直方向像面坐標;f 為經(jīng)緯儀主距;A 為經(jīng)緯儀視軸的方位角;E 為經(jīng)緯儀視軸的高低角。
在事后交會計算中,按照此法分別提取同一時刻下左右兩側經(jīng)緯儀對同一目標的測角值。已知兩側經(jīng)緯儀的站址坐標,交會計算得到該時刻目標的空間坐標,對每一時刻重復上述步驟,即得到目標隨時間的飛行軌跡。上述步驟決定了經(jīng)緯儀高精度解算目標空間位置的過程需要事后進行且需要一定的周期,但在本文中,需要實時解算并發(fā)送至雷達控制程序,傳統(tǒng)的高精度提取目標點的方法不再適用,針對如何實時得到交會結果的問題,考慮到雷達搜索波束范圍較寬,具有一定的容錯能力,本文提出初始段自動跟蹤模式下,基于雙側經(jīng)緯儀視軸指向值實時交會的空間位置解算方法,方法流程步驟如圖5 所示。
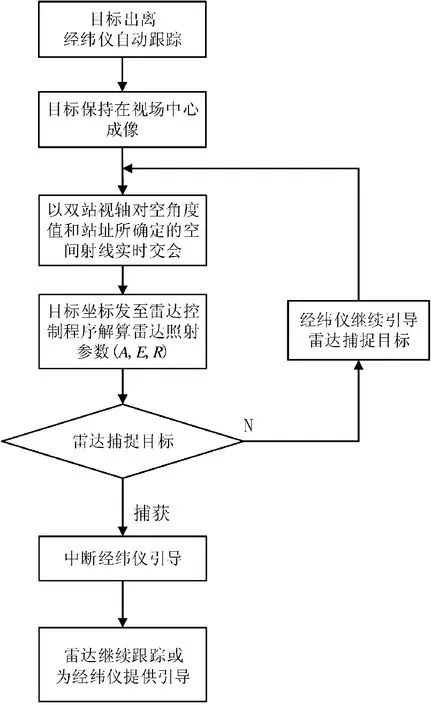
圖5 經(jīng)緯儀-雷達引導方法流程Fig.5 Flow chart of theodolite-radar guidance method
2 經(jīng)緯儀實時交會解算
通過對現(xiàn)有經(jīng)緯儀自動跟蹤響應曲線的分析可知,目標出離瞬間火焰較亮,對背景的對比度較高,采用經(jīng)緯儀自動跟蹤模式在0.3 s 內(nèi)即可捕獲,隨即將目標保持在視場正中心持續(xù)穩(wěn)定跟蹤,此種條件下,目標的像面坐標近似為0,目標相對于經(jīng)緯儀的角度近似等于經(jīng)緯儀視軸的角度,即經(jīng)緯儀方位和俯仰編碼器值。因此,本文采用基于視軸角度即編碼器值交會的實時坐標解算方法,省略像面坐標提取的環(huán)節(jié),實現(xiàn)實時坐標解算目的。
事先雙側經(jīng)緯儀設置合適的捕獲亮度閾值,目標出離時采用自動跟蹤,兩側經(jīng)緯儀將目標保持在視軸上,鏡頭穩(wěn)定平滑跟隨目標移動。
采用局部三維右手直角坐標系,設左站站址為(x1,y1,z1),右站站址為(x2,y2,z2)。
t1時刻下,經(jīng)緯儀視軸的指向角可通過編碼器讀出,從而計算出視軸所在直線l1的方向向量(a,b,c),那么左側經(jīng)緯儀視軸所在的空間射線為:
同理,直線l2的方向向量為(m,n,l),那么右側經(jīng)緯儀視軸所在的空間射線為:
由于實際存在誤差,l1和l2并不相交,即空間異面直線。對此,選擇空間異面直線公垂線的中點作為交會點,設l3為兩條空間異面直線的公垂線,l3與l1的交點為,l3與l2的交點為,當兩點的距離趨于最小值,即存在[9-10]:
得到t1時刻實時解算的目標空間坐標。
3 雷達照射參數(shù)解算
通過經(jīng)緯儀編碼器指向值實時交會得到目標空間坐標,通過局域網(wǎng)通信鏈路發(fā)送至雷達控制主程序,在同一個局部右手坐標系下,以t1時刻為例,已知目標坐標(xt1,yt1,zt1),雷達站址為(x3,y3,z3),在主程序中計算出雷達定位的3 個基本要素:方位A、俯仰E 和距離R,如式(6)[4,11]:
目標出離后的初始段,以(A,E,R)引導雷達指向預定空域并在預定空域搜索目標,可極大增加目標捕獲的概率,于短時間內(nèi)在波束內(nèi)發(fā)現(xiàn)目標,待其發(fā)現(xiàn)并鎖定目標后即可切斷經(jīng)緯儀引導。此時經(jīng)緯儀操作人員視情繼續(xù)保持紅外自動跟蹤,如目標減弱自動跟蹤存在丟失風險時(此時目標角速度已經(jīng)降低),可根據(jù)需要切換單桿手動跟蹤。
目標飛行中后段,由于彈丸火焰較弱或云層遮擋,目標成像質(zhì)量降低,人眼借助跟蹤電視難以辨別目標,隨時有丟失風險時,因雷達跟蹤距離較遠且通常能夠跟蹤到目標落地,所以,飛行中后段可視情采用雷達- 經(jīng)緯儀引導使經(jīng)緯儀繼續(xù)記錄數(shù)據(jù)供事后數(shù)據(jù)處理。
4 雷達-經(jīng)緯儀引導
中后段,以t2時刻為例,雷達將目標位置以(xt2,yt2,zt2)的格式通過局域網(wǎng)通信鏈路發(fā)送至雙側經(jīng)緯儀控制主程序,對于左側經(jīng)緯儀,已知目標坐標(xt2,yt2,zt2)和經(jīng)緯儀站址(x1,y1,z1),可求出目標與左經(jīng)緯儀成像中心連線的方向向量:
進而可計算出左側經(jīng)緯儀的方位和俯仰角度(A1t2,E1t2),通過伺服電機控制經(jīng)緯儀指向預定空域。同理,右側經(jīng)緯儀在伺服電機的控制下指向角度為(A2t2,E2t2)的預定空域。因雷達引導具有一定的定位誤差,發(fā)送的引導數(shù)據(jù)經(jīng)過解算角度有所偏差,但由于經(jīng)緯儀具有一定角度寬視場的優(yōu)勢,可以保證目標被包括在視場內(nèi)(即并不在像面中心)。
中后段雷達- 經(jīng)緯儀引導的意義在于:在事后數(shù)據(jù)處理中,通過圖像比例放大和高低位圖切換,可以逐幀對微弱目標的像面坐標進行提取,通過交會計算得到目標的空間位置,在沒有雷達引導的情況下,只能測試初始段目標飛行航跡,在有雷達引導的條件下,極大增加了經(jīng)緯儀有效數(shù)據(jù)段的長度。
5 實驗驗證
基于現(xiàn)有的有限條件對論文提出的經(jīng)緯儀-雷達引導方法的可行性和有效性進行驗證。
結合某飛行裝置飛行任務開展實地實驗,選取某型紅外經(jīng)緯儀兩臺置于天文圓頂,具有較好的地基穩(wěn)定性。布站如圖6 所示,目標起飛點距離雷達約3.5 km,距離經(jīng)緯儀左站2.2 km,距離右站1.5 km,經(jīng)緯儀基線(兩經(jīng)緯儀間距)長度2.2 km,交會角71°,符合要求。事前對雙側經(jīng)緯儀和雷達的站址進行高精度大地測量。
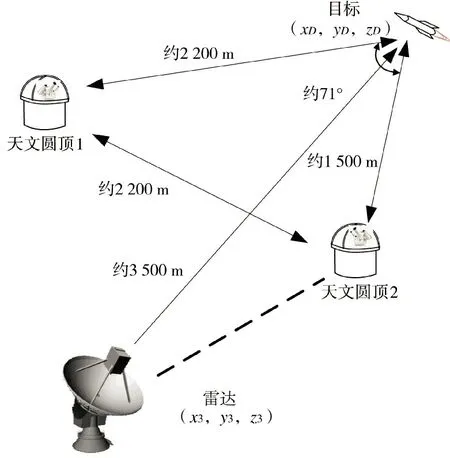
圖6 動態(tài)引導布站圖Fig.6 Dynamic guidance station layout diagram
經(jīng)緯儀跟蹤電視設置合適的套取閾值,目標起飛后,經(jīng)緯儀開啟自動跟蹤,目標在視場中心成像,如圖7 所示。將右站經(jīng)緯儀編碼器值(t,AZX2,EZX2)通過通信鏈路發(fā)送至左站,與左站編碼器值(t,AZX1,EZX1)在左站經(jīng)緯儀控制程序上完成實時交會得到目標坐標(t,xt1,yt1,zt1),發(fā)送至雷達主控程序,解算出雷達的預置照射方向(t,A,E,R),雷達開始搜索目標,記錄雷達搜索結果。結合飛行任務,累計飛行6次,雷達均能在3 s 內(nèi)夠捕獲目標,本文提出的方法經(jīng)實地驗證可行。
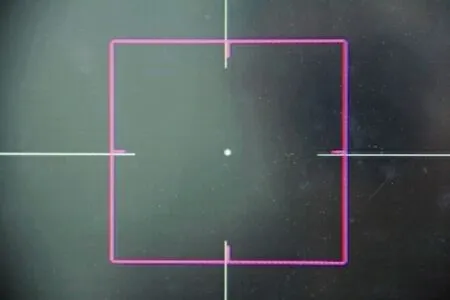
圖7 目標成像圖Fig.7 Target imagining map
本文提出的實時交會空間位置解算方法的關鍵在于兩點:1)初始段經(jīng)緯儀能否將目標套住并保持在視場中心;2)以經(jīng)緯儀視軸進行實時交會引導帶來的誤差應當滿足跟蹤要求。通過合理的閾值設定并預先以信號彈為動目標進行試跟,可以保證目標出離即鎖定并保持目標在視場中心。而經(jīng)緯儀視軸實時交會引導的誤差主要有兩個來源:一是實時交會誤差,二是延時誤差。由前面的論述可知,基于視軸指向值實時交會的過程認定目標亮度中心位于視場中心,即像面脫靶量為0,由式(1)可知,當像面脫靶量(x,y)為0 時,經(jīng)緯儀對目標的測角值等于視軸的角度值,而實際上像面脫靶量近似為0,此外還受經(jīng)緯儀三差、交會誤差等的影響。下面針對以經(jīng)緯儀指向值(編碼器值)代替目標角度值進行實時交會的誤差進行檢測。
采用視場角為20°×20°的某型彈道相機兩臺作為比對設備,分別置于左右兩側的天文圓頂,相機采用凝視狀態(tài),與經(jīng)緯儀同時測試飛行目標,二者采用統(tǒng)一的授時。事后交會得到0.5~5 s 時間段內(nèi)的目標飛行軌跡數(shù)據(jù),根據(jù)萊以特3σ 準則剔除異常值[12],記錄經(jīng)緯儀實時發(fā)送的坐標數(shù)據(jù),剔除異常值。因兩種設備的采樣頻率不同,選取同時刻下經(jīng)緯儀數(shù)據(jù)與彈道相機數(shù)據(jù)進行比對。采用均方根誤差RMSE 公式衡量各方向上誤差的大小,RMSE誤差公式為[13]:
比對結果如表1 所示。
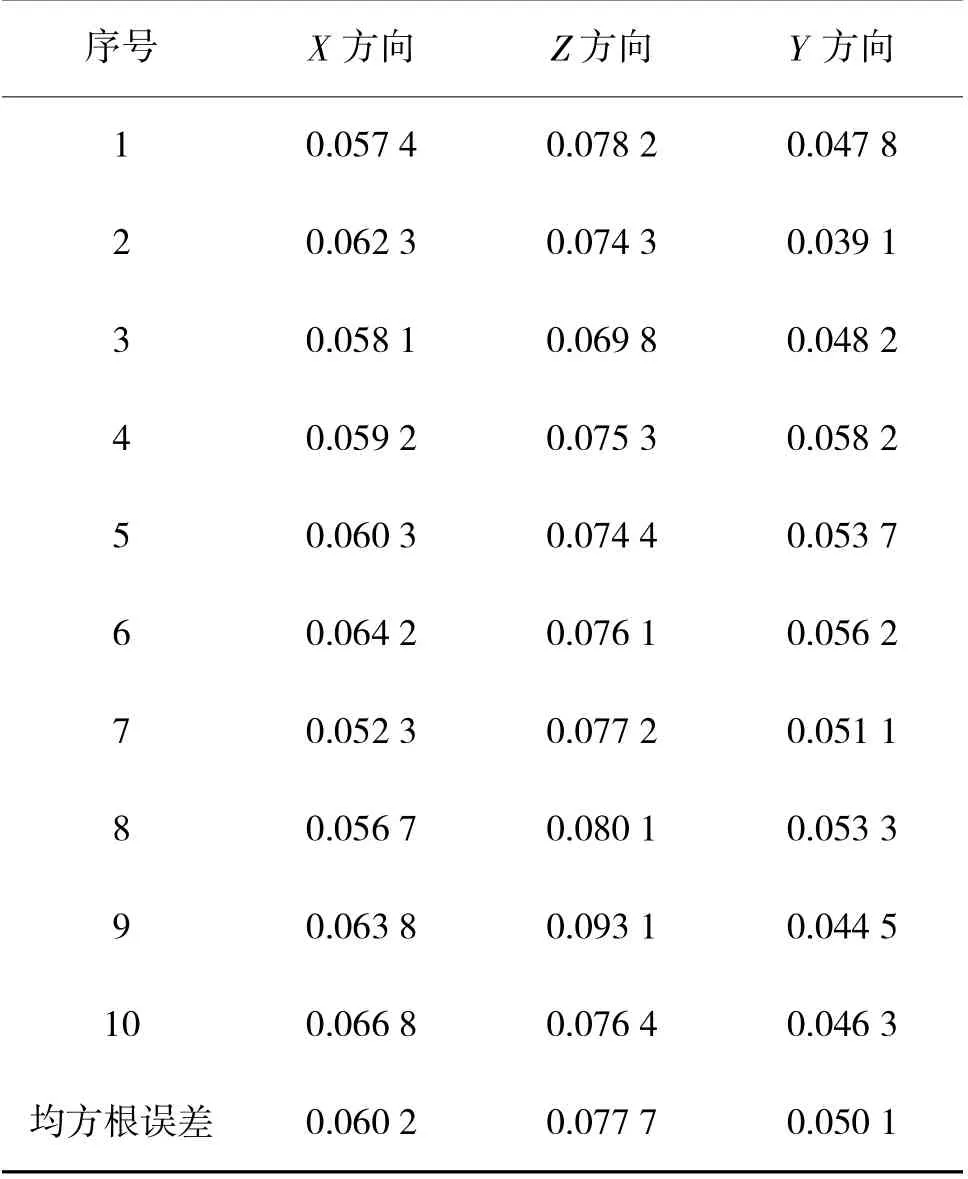
表1 誤差比對Table 1 Error comparison
通過數(shù)據(jù)對比分析可知,Z 方向上的誤差略大,X 和Y 方向(海拔高方向)上的誤差略小,根據(jù):
合并3 個方向的誤差,粗略估算經(jīng)緯儀實時交會結果偏離目標坐標真值的最大距離約為12 cm,對于雷達搜索波束在可接受的范圍內(nèi),本文提出的方法可行。
下面對延時誤差進行分析,延時有兩個來源:一是經(jīng)緯儀實時交會的計算延遲;二是目標的空間坐標通過通信鏈路發(fā)送至雷達控制計算機,通信造成的延遲。實時交會計算延遲即程序運行造成的延時可忽略不計,故影響主要表現(xiàn)在通信鏈路延遲。據(jù)檢測結果,本文所采用的通信鏈路延遲保持在10 ~20 ms 之間,對某一出離運動速度在40~50 m/s之間的亮目標進行跟蹤,以25 ms 為例進行計算,25 ms 內(nèi)目標飛行約1.25 m,雷達作用距離為1 km時,偏離角度約為5';雷達作用距離為2 km 時,偏離角度約為2.2';雷達作用距離為3 km 時,偏離角度約為1.5',對于發(fā)散角1°左右的雷達來講能夠滿足引導要求。為了進一步分析通信鏈路延遲對引導的影響,本文采用如下方法進行驗證:
仍舊采用圖6 所示的布站方式,經(jīng)緯儀對某一出離運動速度在40~50 m/s 之間的亮目標進行跟蹤,實時交會并發(fā)送坐標引導雷達捕獲目標,此時經(jīng)緯儀中斷數(shù)據(jù)發(fā)送,雷達發(fā)送數(shù)據(jù)引導經(jīng)緯儀轉動,實驗結果為:目標仍舊保持在經(jīng)緯儀視場中但略有偏離,左站作用距離2.2 km,目標偏離視場中心的角度大約為5';右站作用距離1.5 km,目標偏離視場中心的角度約1/10 視場,約為12',對于2°×2°視場的經(jīng)緯儀能夠滿足跟蹤要求。此外,本文提出的經(jīng)緯儀- 雷達引導策略主要用于初始段的目標捕獲,目標在較短距離加速過程后的初速通常不高,故可以滿足一般目標出離捕獲的需求。
對于引導延遲帶來的影響,可采用基于包數(shù)據(jù)交換協(xié)議(PDXP)的通信方式[14],首先,數(shù)據(jù)包發(fā)送后會收到回執(zhí);其次,在統(tǒng)一的授時下,數(shù)據(jù)包接收方會收到發(fā)送方的發(fā)送時刻,從而計算得到準確延時,方便被引導方進行彈道外推修正引導數(shù)據(jù),從而克服遠距離引導跟蹤時延時所帶來的顯著影響。
6 結論
針對彈道雷達在目標飛行初始段難以短時間捕獲目標的問題,本文提出一種在彈道坐標測試過程中,主動段光學經(jīng)緯儀引導彈道雷達跟蹤目標,中末段彈道雷達引導經(jīng)緯儀繼續(xù)成像的經(jīng)緯儀-雷達協(xié)同跟蹤策略,克服單一傳感器的局限和不足。提出初始段自動跟蹤模式下的基于雙側經(jīng)緯儀視軸指向值實時交會的空間位置解算方法,實現(xiàn)空中目標位置的快速解算。基于現(xiàn)有條件,進行了經(jīng)緯儀- 雷達引導實驗驗證并開展與某型彈道相機交會結果的比對,驗證了方法的可行性和有效性,可有效協(xié)助雷達在目標出離后短時間內(nèi)捕獲目標,增加了有效數(shù)據(jù)段的長度,為提升目跟蹤標捕獲率、促進多傳感器數(shù)據(jù)融合和豐富靶場彈道坐標測量方法手段提供理論、方法的借鑒和參考。
