基于循環(huán)神經(jīng)網(wǎng)絡(luò)的彈藥著速預(yù)測(cè)
2024-04-16 12:18:40王現(xiàn)磊王義江陳春江吳家健
火力與指揮控制 2024年3期
關(guān)鍵詞:模型
王現(xiàn)磊,王義江,陳春江,吳家健
(解放軍63861 部隊(duì),吉林 白城 137001)
0 引言
在武器系統(tǒng)試驗(yàn)靶場(chǎng),獲取高精度彈道參數(shù)是評(píng)定和分析武器打擊精度的重要內(nèi)容[1]。而彈藥的著速是影響目標(biāo)毀傷程度的重要參數(shù)之一,因此,精準(zhǔn)獲取彈藥的著靶速度成了重要研究目標(biāo)。目前靶場(chǎng)大多采用梳狀靶、電探針等區(qū)截裝置接觸式測(cè)量法[2],測(cè)量值與真值相差較大;高速攝影裝置可以對(duì)彈藥飛行過(guò)程實(shí)時(shí)記錄其影像,但人工判讀底片過(guò)程,不可避免引入一定程度的測(cè)量誤差[3];連續(xù)波測(cè)量雷達(dá)是獲取彈藥徑向速度的重要途徑,具有測(cè)速精度高的優(yōu)點(diǎn),但是立靶對(duì)雷達(dá)回波信號(hào)產(chǎn)生較大噪聲和干擾,后續(xù)對(duì)彈藥著速的提取依賴于信號(hào)的濾波、特征點(diǎn)的提取以及對(duì)數(shù)據(jù)處理的經(jīng)驗(yàn),其精度受到不同程度影響。本文通過(guò)使用雷達(dá)采集的時(shí)間速度序列數(shù)據(jù),將循環(huán)神經(jīng)網(wǎng)絡(luò)應(yīng)用于彈藥著速的預(yù)測(cè),以期提高彈藥著速的精確性,具有較大的理論意義。
彈藥飛行的速度數(shù)據(jù),具有三大特性:隨機(jī)性、連續(xù)性和周期性。當(dāng)前時(shí)間點(diǎn)的速度受到溫度、風(fēng)速等空氣動(dòng)力學(xué)因素的影響,速度數(shù)據(jù)具有隨機(jī)性;相鄰時(shí)間速度的值是連續(xù)的,具有時(shí)間依賴性,因此,具有連續(xù)性;周期性是指時(shí)間速度數(shù)據(jù)呈某種趨勢(shì)的現(xiàn)象,因此,將速度數(shù)據(jù)作為時(shí)間序列進(jìn)行分析與預(yù)測(cè)具有可行性,利用RNN 對(duì)彈藥著速進(jìn)行預(yù)測(cè),并與RFR 算法和基于BP 的MLP 模型預(yù)測(cè)結(jié)果進(jìn)行對(duì)比,取得了滿意的擬合效果,對(duì)彈藥后續(xù)指標(biāo)的評(píng)估具有實(shí)用價(jià)值。
1 時(shí)間序列預(yù)測(cè)
時(shí)間序列預(yù)測(cè)的方法主要包括基于數(shù)學(xué)理論模型的預(yù)測(cè)方法和基于大數(shù)據(jù)驅(qū)動(dòng)預(yù)測(cè)方法[4]。數(shù)學(xué)理論模型預(yù)測(cè)方法主要基于數(shù)學(xué)和統(tǒng)計(jì)學(xué)等知識(shí),僅從時(shí)間的維度對(duì)被預(yù)測(cè)對(duì)象建模,對(duì)復(fù)雜時(shí)間序列數(shù)據(jù)難以建立精確的數(shù)理統(tǒng)計(jì)模型,適用性受到極大限制且預(yù)測(cè)精度大大降低。基于大數(shù)據(jù)驅(qū)動(dòng)預(yù)測(cè)的方法主要有傳統(tǒng)機(jī)器學(xué)習(xí)方法、前饋神經(jīng)網(wǎng)絡(luò)方法和循環(huán)神經(jīng)網(wǎng)絡(luò)等[5]。傳統(tǒng)的機(jī)器學(xué)習(xí)方法,如線性回歸、支持向量機(jī)、隨機(jī)森林等算法[6-8],對(duì)于時(shí)間序列的處理,是利用數(shù)據(jù)中的維度特征,進(jìn)而構(gòu)建起從因變量到目標(biāo)預(yù)測(cè)值的函數(shù)方程,通過(guò)不斷優(yōu)化構(gòu)建的損失函數(shù),來(lái)構(gòu)造回歸模型。但是該類(lèi)模型在建模時(shí)僅考慮時(shí)間序列當(dāng)前時(shí)間點(diǎn)的特性,忽略了數(shù)據(jù)彼此間具有時(shí)間依賴性,因此,預(yù)測(cè)精度不高。
神經(jīng)網(wǎng)絡(luò)是一種由大量運(yùn)算節(jié)點(diǎn)之間互相連接構(gòu)成的運(yùn)算模型。每個(gè)節(jié)點(diǎn)代表一種特定的輸出函數(shù),即激勵(lì)函數(shù)。每?jī)蓚€(gè)節(jié)點(diǎn)間的連接都代表一個(gè)對(duì)于通過(guò)該連接信號(hào)的加權(quán)值,稱之為權(quán)重,這相當(dāng)于人工神經(jīng)網(wǎng)絡(luò)的記憶。網(wǎng)絡(luò)的輸出則以網(wǎng)絡(luò)的連接方式、權(quán)重值和激勵(lì)函數(shù)的不同而不同。而網(wǎng)絡(luò)自身通常都是自然界某種算法或者函數(shù)的逼近,也可能是一種邏輯策略的表達(dá)[9]。神經(jīng)網(wǎng)絡(luò)模型的神奇點(diǎn)就在于它是一個(gè)“黑盒”模型,輸入大量歷史數(shù)據(jù),模型就可以自動(dòng)學(xué)習(xí)到序列之間的規(guī)則以及依賴關(guān)系。神經(jīng)網(wǎng)絡(luò)方法彌補(bǔ)了傳統(tǒng)統(tǒng)計(jì)模型固有的劣勢(shì),可以處理具有非線性模式數(shù)據(jù)。根據(jù)需要,僅對(duì)前饋神經(jīng)網(wǎng)絡(luò)做簡(jiǎn)單介紹。
2 前饋神經(jīng)網(wǎng)絡(luò)
2.1 多層感知機(jī)
人工神經(jīng)網(wǎng)絡(luò)(artificial neural network,ANN)由神經(jīng)生理學(xué)家Warren McCulloch 和數(shù)學(xué)家Walter Pitts 于1943 年首次提出,通過(guò)對(duì)生物神經(jīng)元進(jìn)行建模,首次提出了一種形式神經(jīng)元模型;1957 年Frank Rosenblatt 提出了感知機(jī),感知機(jī)是最簡(jiǎn)單的ANN架構(gòu),能夠確定神經(jīng)元的連接權(quán)重,但無(wú)法解決線性不可分問(wèn)題,基于此人們提出了MLP 模型,也稱為前饋網(wǎng)絡(luò)模型。MLP 通常采用3 層結(jié)構(gòu),由輸入層、隱藏層及輸出層組成。如圖1 所示。

圖1 多層感知機(jī)模型Fig.1 Multi-layer perceptron model
輸入層表示神經(jīng)元接受x1,x2,…,xn作為輸入,隱藏層通過(guò)權(quán)重與輸入層的各單元相連接,通過(guò)激勵(lì)函數(shù)計(jì)算隱藏層各單元的輸出值,同樣通過(guò)權(quán)重與輸出層相連接。由于模型的輸出與模型自身之間不存在反饋過(guò)程,因此,被稱為前饋神經(jīng)網(wǎng)絡(luò)。
2.2 誤差反向傳播算法
1986 年 David Rumelhart、Geoffrey Hinton 和Ronald Williams 發(fā)表的開(kāi)創(chuàng)性文獻(xiàn)[10]介紹了誤差反向傳播訓(xùn)練算法,該算法能夠針對(duì)每個(gè)模型參數(shù)計(jì)算網(wǎng)絡(luò)誤差的梯度,并通過(guò)比較實(shí)際輸出和期望輸出得到誤差信號(hào)E,把誤差信號(hào)從輸出層逐層向前傳播得到各層的誤差信號(hào),再通過(guò)調(diào)整各層的連接權(quán)重以減小誤差。其權(quán)重的調(diào)整主要結(jié)合梯度下降法,過(guò)程如圖2 所示。

圖2 梯度下降法Fig.2 Gradient descent method
通過(guò)實(shí)際輸出和期望輸出之間的誤差E 和梯度,確定連接權(quán)重w0調(diào)整值,得到新的連接權(quán)重w1,然后反復(fù)不斷地調(diào)整權(quán)重以使誤差E 達(dá)到最小,并從中學(xué)習(xí)得到最優(yōu)的權(quán)重連接wopt,即網(wǎng)絡(luò)收斂到最優(yōu)解。
3 著速預(yù)測(cè)網(wǎng)絡(luò)模型
3.1 模型介紹
著速預(yù)測(cè)網(wǎng)絡(luò)模型是一個(gè)從序列到向量的網(wǎng)絡(luò),由連續(xù)波雷達(dá)采集的時(shí)間速度數(shù)據(jù)作為輸入序列,并忽略彈藥著速外的所有輸出,即忽略飛行過(guò)程的速度值,輸出著靶速度。其模型按時(shí)間展開(kāi)的網(wǎng)絡(luò)如圖3 所示。
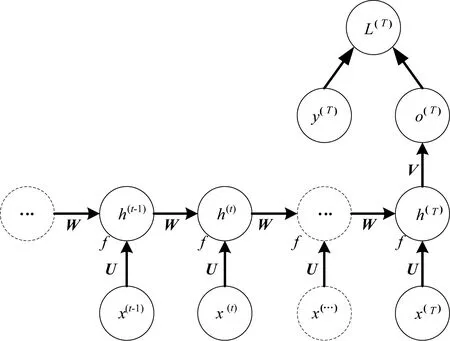
圖3 時(shí)間展開(kāi)的網(wǎng)絡(luò)模型Fig.3 Network model of time expansion
圖3 為含有一層循環(huán)神經(jīng)網(wǎng)絡(luò)、若干隱藏節(jié)點(diǎn)的著速預(yù)測(cè)模型。其中,損失衡量序列結(jié)束時(shí)的輸出與相應(yīng)的訓(xùn)練目標(biāo)的距離;U 表示RNN輸入層到隱藏層的連接權(quán)重矩陣,W 表示隱藏到隱藏的循環(huán)連接權(quán)重矩陣;V 表示隱藏到輸出的連接權(quán)重矩陣;f 為激活函數(shù);為記憶單元且滿足式(1),即在時(shí)間步長(zhǎng)t 時(shí)刻遞歸神經(jīng)元的輸出是先前時(shí)間步長(zhǎng)中的所有輸入函數(shù)
式中,b 為偏置向量。
3.2 評(píng)價(jià)指標(biāo)
為量化實(shí)驗(yàn)結(jié)果便于比較,本文選取了預(yù)測(cè)問(wèn)題的典型性能指標(biāo)均方根誤差(RMSE),其公式如下:
4 實(shí)驗(yàn)及結(jié)果分析
4.1 數(shù)據(jù)集說(shuō)明
實(shí)驗(yàn)選用某型穿甲彈連續(xù)波雷達(dá)采集并處理后的速度數(shù)據(jù)共計(jì)60 發(fā),作為實(shí)驗(yàn)數(shù)據(jù)集,每發(fā)彈的數(shù)據(jù)格式為等間隔的、連續(xù)的81 個(gè)時(shí)間速度點(diǎn),其中,最后一點(diǎn)為彈藥著靶速度。隨機(jī)選取42 發(fā)(占70%)作為訓(xùn)練集,6 發(fā)作為驗(yàn)證集,剩余12 發(fā)(占20%)作為測(cè)試集。樣本輸入特征(x_train,x_valid,x_test)為[42,80,1],即總共42 發(fā)數(shù)據(jù),每發(fā)前80 個(gè)點(diǎn)作為輸入樣本,維度為1;輸出特征(y_train,y_valid,y_test)為[42,1,1],即每發(fā)彈藥的著靶速度,共計(jì)42 發(fā)。
4.2 模型超參數(shù)設(shè)置及訓(xùn)練
激活函數(shù)選擇不同會(huì)導(dǎo)致梯度不穩(wěn)定問(wèn)題,通過(guò)控制變量方法,為著速預(yù)測(cè)網(wǎng)絡(luò)模型選取ReLU 激活函數(shù),并使用其初始化策略即He 初始化;對(duì)比常規(guī)梯度下降優(yōu)化器,選取Adam 優(yōu)化器加快訓(xùn)練速度,由于Adam 是一種自適應(yīng)學(xué)習(xí)率算法,因此,不對(duì)學(xué)習(xí)率超參數(shù)η 進(jìn)行調(diào)整,使用其默認(rèn)值η=0.001。
本實(shí)驗(yàn)中多層感知機(jī)模型和預(yù)測(cè)網(wǎng)絡(luò)模型的隱藏層數(shù)(n_hidden)與每層包含的神經(jīng)元數(shù)(n_neurons),采取RandomizedSearchCV 探索超參數(shù)空間,如表1 所示。
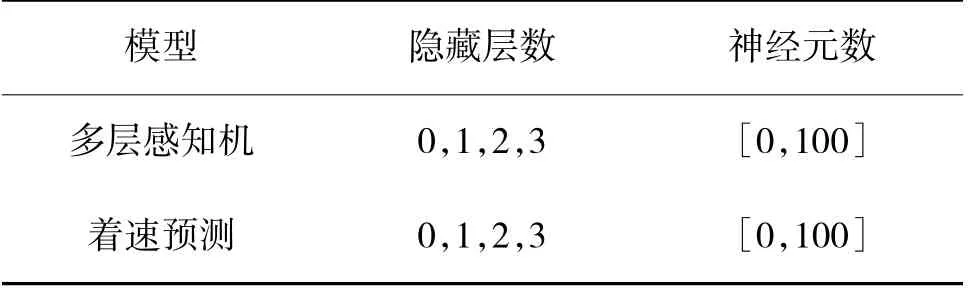
表1 超參數(shù)空間Table 1 Hyperparametric space
設(shè)置n_hidden:[0,1,2,3],n_neurons 為[0,100],設(shè)置最大迭代次數(shù)為200,當(dāng)損失值連續(xù)10 次未發(fā)生改變或至最大迭代次數(shù)時(shí),嘗試其他超參數(shù)組合,結(jié)束并輸出最佳超參數(shù)組合。
經(jīng)過(guò)RandomizedSearchCV 探索超參數(shù)空間,多層感知機(jī)模型和著速預(yù)測(cè)網(wǎng)絡(luò)模型返回最佳超參數(shù)組合及超參數(shù)設(shè)置如表2 所示,根據(jù)訓(xùn)練過(guò)程,兩個(gè)模型epoch 在90 左右RMSE 值收斂于穩(wěn)定狀態(tài),因此,設(shè)置epoch=110。
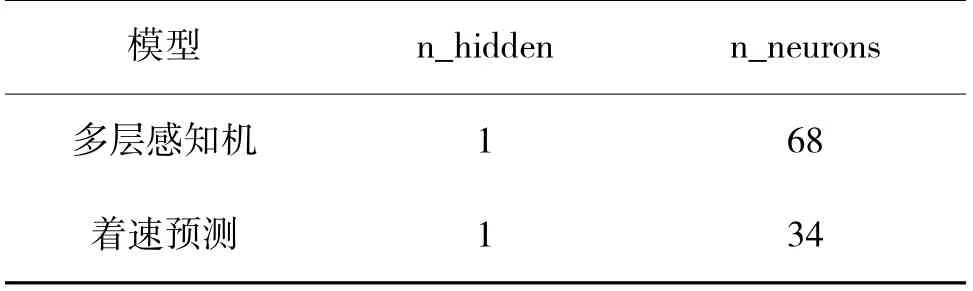
表2 最佳超參數(shù)組合Table 2 Best combination of hyperparametric
多層感知機(jī)模型和著速預(yù)測(cè)網(wǎng)絡(luò)模型訓(xùn)練過(guò)程中其訓(xùn)練樣本RMSE 曲線分別如圖4、圖5 所示;隨機(jī)森林回歸算法,通過(guò)調(diào)整參數(shù)訓(xùn)練樣本并對(duì)測(cè)試集進(jìn)行預(yù)測(cè),其RMSE 值如表3 所示。從圖中可以看出,訓(xùn)練樣本在兩種模型中RMSE 最終均趨于穩(wěn)定的收斂狀態(tài),其網(wǎng)絡(luò)學(xué)習(xí)過(guò)程較為類(lèi)似,相較而言著速預(yù)測(cè)網(wǎng)絡(luò)模型收斂速度更快;由表3 可直觀的看出著速預(yù)測(cè)網(wǎng)絡(luò)模型在測(cè)試集上的RMSE值相比其他兩種更小,即擬合效果更佳。

表3 測(cè)試集RMSE 值Table 3 RMSE values of test set
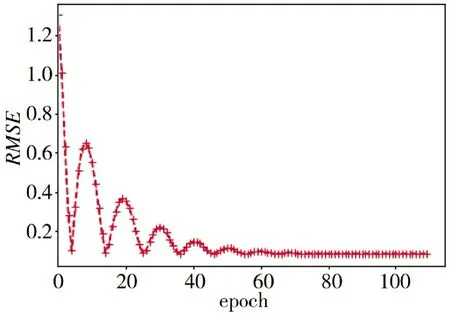
圖4 多層感知機(jī)訓(xùn)練過(guò)程Fig.4 Training process of multi-layer perceptron
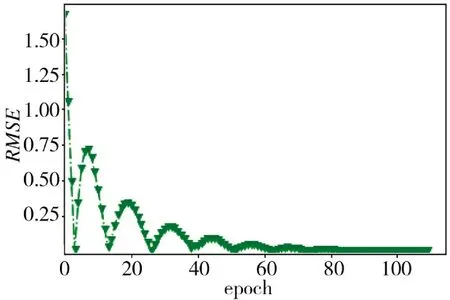
圖5 著速預(yù)測(cè)模型訓(xùn)練過(guò)程Fig.5 Training process of target velocity prediction model
著速預(yù)測(cè)模型真值與預(yù)測(cè)結(jié)果如圖6 所示,實(shí)驗(yàn)結(jié)果表明該模型的適用性較強(qiáng),可通過(guò)網(wǎng)絡(luò)模型的不斷訓(xùn)練較準(zhǔn)確的學(xué)習(xí)出不同彈速的飛行規(guī)律,并給出精準(zhǔn)的預(yù)測(cè),由后續(xù)的測(cè)試誤差圖可知,該模型具有很好的穩(wěn)定性。
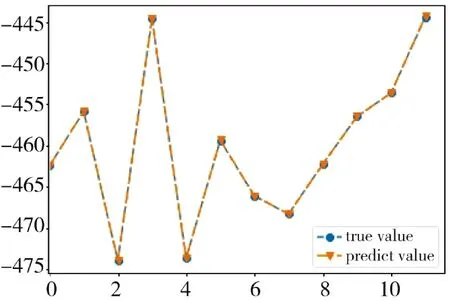
圖6 著速預(yù)測(cè)模型測(cè)試結(jié)果Fig.6 Test results of target velocity prediction model
為了直觀地對(duì)比3 種模型對(duì)彈藥著速的預(yù)測(cè),實(shí)驗(yàn)測(cè)試集誤差結(jié)果如圖7~圖9 所示。
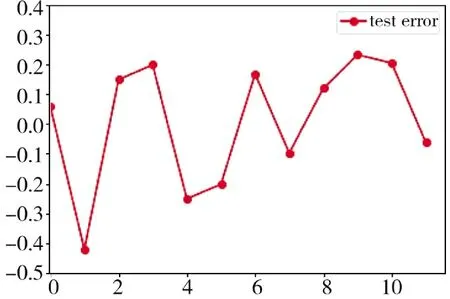
圖7 隨機(jī)森林測(cè)試誤差Fig.7 Random forest test errors
隨機(jī)森林回歸算法是一種基于集成學(xué)習(xí)的監(jiān)督式機(jī)器學(xué)習(xí)算法,通過(guò)加入不同或相同類(lèi)型算法獲取強(qiáng)大且穩(wěn)健的預(yù)測(cè)模型,且不易陷入過(guò)擬合;但因其隨機(jī)性,由圖7 可知預(yù)測(cè)結(jié)果不是很穩(wěn)定,有較大的波動(dòng)性,該算法對(duì)測(cè)試集著速預(yù)測(cè)誤差在0.2 左右。多層感知機(jī)模型,超參數(shù)空間較大且復(fù)雜,其隱藏層包含的神經(jīng)元數(shù)更多,通過(guò)選擇適宜的激活函數(shù)和超參數(shù),基于BP 算法訓(xùn)練其模型用于著速預(yù)測(cè),由圖8 可知,測(cè)試集著速預(yù)測(cè)誤差在0.15 左右,相比于隨機(jī)森林回歸算法預(yù)測(cè)精度和穩(wěn)定性得到改善,但預(yù)測(cè)結(jié)果穩(wěn)定性仍有起伏。而著速預(yù)測(cè)網(wǎng)絡(luò)模型受益于隱藏層之間有循環(huán)連接,考慮了速度數(shù)據(jù)之間存在時(shí)序上的依賴關(guān)系,極大地提高了網(wǎng)絡(luò)模型對(duì)速度數(shù)據(jù)的分析、學(xué)習(xí)能力和預(yù)測(cè)精度,且加快了網(wǎng)絡(luò)模型的訓(xùn)練速度,從而使網(wǎng)絡(luò)學(xué)習(xí)效果得到提高,由圖9 可知,其預(yù)測(cè)誤差絕對(duì)值在0.02 左右,且穩(wěn)定性更好;相比于前兩個(gè)算法模型,其預(yù)測(cè)精度有數(shù)量級(jí)的提升,取得了較好的實(shí)驗(yàn)效果,得到了更精確的預(yù)測(cè)結(jié)果。
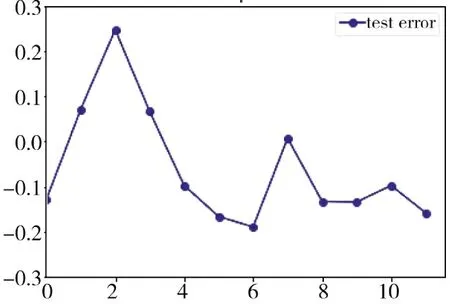
圖8 多層感知機(jī)測(cè)試誤差Fig.8 Multi-layer perceptron test errors
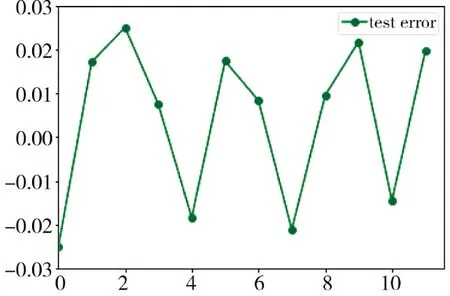
圖9 著速預(yù)測(cè)模型測(cè)試誤差Fig.9 Test errors of target velocity prediction model
5 結(jié)論
本文分別使用隨機(jī)森林回歸算法、基于BP 的多層感知機(jī)模型和基于RNN 的著速預(yù)測(cè)模型,對(duì)某型穿甲彈的著速進(jìn)行預(yù)測(cè),從預(yù)測(cè)結(jié)果分析得出基于RNN 的預(yù)測(cè)模型,可更好地從速度數(shù)據(jù)中挖掘序列之間的內(nèi)部關(guān)聯(lián)且模型的適應(yīng)性較強(qiáng),預(yù)測(cè)精度優(yōu)于傳統(tǒng)方法。實(shí)驗(yàn)結(jié)果表明,基于RNN 的著速預(yù)測(cè)模型,切實(shí)提高了分析預(yù)測(cè)效果,其預(yù)測(cè)結(jié)果可作為彈藥著靶速度。本文構(gòu)建的模型具有一定的應(yīng)用推廣價(jià)值,可推廣應(yīng)用于雷達(dá)測(cè)速數(shù)據(jù)跳點(diǎn)、丟失點(diǎn)的填補(bǔ)。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
