基于射擊時機的坦克射擊門分析及改進*
2024-04-16 12:18:40張賢椿姚志軍劉宗凱
火力與指揮控制 2024年3期
張賢椿,姚志軍,王 軍,劉宗凱
(1.南京理工大學自動化學院,南京 210094;2.白城兵器試驗中心,吉林 白城 137001)
0 引言
坦克身管作為彈丸的最后投射裝置,在發射條件、氣象條件確定的情況下,彈丸出膛瞬間身管的運動狀態直接決定了彈丸的外彈道軌跡和落點。改進坦克生產制造工藝、火控以及炮控性能可優化身管的動態特性并提升坦克的瞄準精度,是提升坦克行進間射擊精度的主動措施。而在坦克性能確定的前提下,增加對身管振動狀態下對有效射擊時機的實時判斷能力,如引入射擊門體制,是提升坦克的命中精度的被動措施。
傳統射擊門是指以火控計算機輸出的射擊諸元為基準的射擊線角度容許誤差區域,基于身管角度誤差閾值的開火判據稱為簡單射擊門[1-3]。坦克采取射擊門體制的底層邏輯是:在坦克靜止或低速情況下,射擊門與目標截面存在較為確定的“映射”關系,即身管在射擊門內開火大概率可確保彈丸命中目標,這一提升坦克射擊精度的被動措施在實際射擊中亦得到體現。然而隨著坦克在實際路面行進速度的提高,坦克高速行進的可射擊時機和命中概率下降顯著[4-5]。坦克射擊門是決定射擊時機的關鍵環節,故有必要針對坦克射擊門對射擊時機的影響進行分析,以提升坦克在高速行進間的命中概率。本文通過對已有多種射擊門的機理進行分析,指出現有射擊門在射擊時機判斷上的不足之處,并給出了射擊門的改進方法,可使坦克火控最大限度地把握已有的射擊時機。
1 射擊門體制
身管運動基于射擊門向目標射擊時的彈丸落點關系如圖1 所示,在射擊門的作用下,彈丸基于身管炮口端運動曲線g 點飛向目標截面W 所屬平面S 的落點Q,Q 點在W 面上運動形成的曲線s 的映射關系如圖1 所示。這里定義身管在高低向的完整穿越過程,為身管從射擊門一側穿入并從射擊門另一側穿出的過程,理論上身管對射擊門的穿越性對應著彈丸落點Q 對目標截面的穿越性。
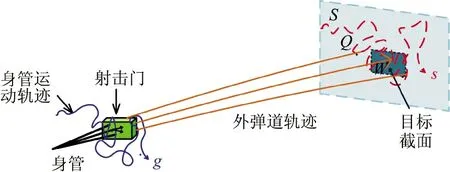
圖1 基于射擊門的彈目交匯圖Fig.1 Projectile and target intersection diagram based on firing gate
坦克高速行進間射擊精度的顯著下降,其主要原因是坦克身管振動強度增大對發射的彈丸落點影響偏差變得不可忽略,主要體現在兩個方面:1)彈丸從開火到出膛的擊發時延導致出膛時的身管角度偏出射擊門[6];2)在彈丸出膛瞬間身管運動賦予彈丸的切向速度導致彈丸飛行軌跡偏離目標截面[7-8]。針對這兩種情況,文獻[6-7]分別給出了針對彈丸膛內運動時延和身管運動切向速度的射擊門改進方法。圖2 分別給出了簡單射擊門、考慮擊發延遲的射擊門(簡稱延遲射擊門)以及考慮身管切向速度的射擊門(簡稱速度射擊門)的控制邏輯。

圖2 不同射擊門控制邏輯Fig.2 Control logic of different firing gates
以上射擊門控制邏輯中,圖2 除了要求的射擊開關、擊發狀態、穩炮狀態和封門信號等使能信號外,其射擊門控制邏輯的主要數學模型如下描述。下面分別對圖2 所示的射擊門的數學控制邏輯進行分析。
1.1 簡單射擊門
簡單射擊門是以射擊諸元高低和方位角度為基準,實際火炮身管角度與射擊諸元角度的誤差允許區間,滿足簡單射擊門的判據邏輯為:身管處于射擊門內時擊發即可命中目標。表達式為:
式中,Mθ與Mφ表示方位及高低向的誤差門限值,θ(t)與φ(t)表示火炮動態高低角及方位角,θ0與φ0火炮高低向與方位向裝定諸元角度,該射擊門僅對身管瞬時角度設置了門限值,對身管振動角速度未作約束。
1.2 延遲射擊門
由于自坦克擊發到彈丸出膛的擊發時延ΔT的存在,ΔT 通常在10 ms 左右,可以近似認為身管在ΔT 時間內的角速度不變,則考慮擊發延遲的射擊門判據邏輯為:在身管進入簡單射擊門的前提下(自動擊發底火),因擊發延遲導致的身管角度依然處于射擊門內。表達式如式(3),其復合射擊門控制邏輯為[6]:
其中,式(3)中ωθ為高低角速度,ωφ為方位角速度。對應的身管運動角速度約束如下:
1.3 速度射擊門
坦克行進間火炮身管振動賦予彈丸切向速度影響彈丸落點,且其落點偏差量與彈丸飛行時間近似呈線性關系[8],通過簡化計算落點偏差,確定射擊門的開火邏輯為:自火炮身管在一側進門時自動擊發底火,彈丸因切向速度及擊發時延引起的落彈偏差依然在目標著彈面內,可得約束身管運動的角速度如式(6),其復合射擊門控制邏輯為[7]:
其中
且
分別為高低向和方位向的彈丸落點偏差,可知彈丸落點偏差方向與身管運動方向保持一致。上式Rgd、Rfw分別為身管高低向和方位向的回轉半徑,B、H 分別為炮目視角下目標的長度和寬度,D 為炮目距離,v 為彈丸出膛時的合速度。
以上不同射擊門的條件可區分為身管角度條件和角速度條件,其中式(1)、式(2)和式(5)為身管角度條件,式(4)和式(6)為身管角速度條件。由上可知,無論是延遲射擊門還是速度射擊門,其判斷射擊時機的核心邏輯是:身管須處于簡單射擊門內,同時要求身管角速度足夠小,以確保擊發時延ΔT 過后的身管繼續處于射擊門內。下面通過分析身管高低角穿越射擊門過程中的開火時機,來闡明現有射擊門在射擊時機的把握上存在的缺陷。
2 射擊時機分析
以身管的高低向運動情況為例,身管從A 到B 一次單向運動過程,形成對高低向誤差門限值[-Mθ,Mθ]的完整向下穿越,如圖3 左側所示;其身管角速度變化如圖3 右側所示。針對以上射擊門的控制邏輯,可知無論火炮采取哪一種射擊門體制,火炮必須在t1(對應s1位置)時刻(含)后的簡單射擊門閾值[-Mθ,Mθ]范圍內擊發。
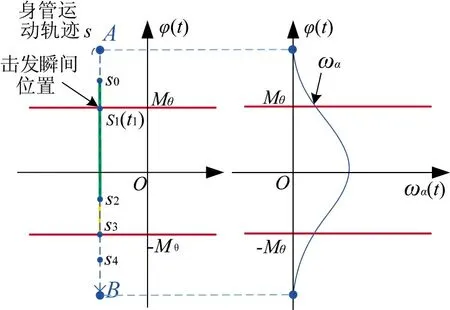
圖3 高低向上射擊時機示意圖Fig.3 Schematic diagram of firing opportunity in elevation direction
由于彈丸落點會基于身管運動方向偏移,式(8)在身管振動速度較快時,其在射擊時機的判斷上存在以下兩個問題:
一是部分在簡單射擊門外的身管位置也是有效的射擊時機,由于簡單射擊門的角度約束導致該部分射擊時機無效,如圖3 中s0s1線段所示;
二是部分在簡單射擊門范圍內的開火時機為無效射擊時機,卻被已有射擊門當成有效射擊時機,如圖3 中s2s3線段所示。
同時,由于延遲門及速度門均設置了角速度的約束條件,坦克行進速度增加使得身管振動速度過大時,會導致身管在完全穿越情況下也沒有射擊時機。然而從原理上分析,無論身管振動速度多大,對于身管的一次完全穿越過程,如圖3 中身管高低向從A 到B 點的運動過程,其對應的彈丸落點軌跡s(見圖1)亦對目標截面形成穿越(方位向同理),存在有效射擊時機,只要火炮的擊發時刻控制合理即可。
由以上分析可知,現有的射擊門均存在對有效射擊時機判斷不準確或錯失射擊時機的情況,為更好地把握可能的射擊時機,本文提出了一種射擊時機快速預測機制下的射擊門改進方法。
3 射擊時機預測模型
記身管t 時刻運動狀態向量
狀態向量中各分量分別為身管高低及方位的角位置、角速度和角加速度。坦克身管的運動狀態可通過在身管上加裝傳感器的方式并進行相關的數據處理得到[10]。身管在預測時長Δt 后的高低及方位向的預測角度可表達為
影響彈丸外彈道飛行軌跡的身管運動狀態參數有身管角度和角速度,加速度對彈丸落點不產生直接影響[11]。由于擊發時延Δt 非常短,可認為身管角速度在Δt 內保持不變,則身管角速度影響彈目偏差近似表達如下[6]:
其中,ΔB(t)與ΔH(t)為彈丸落點在目標截面高低及方位向上相對射擊諸元對應理想落點的偏差,v表示彈丸出膛時的平均飛行速度。對于坦克炮這類低伸彈道,該彈目偏差對應的身管指向角偏差亦可近似表達為
將擊發時延Δt 后的預測角度θ(t+Δt)、φ(t+Δt)考慮進來,則
相當于火炮在考慮擊發時延和身管切向速度影響下的對等靜態開火角度。這樣可基于式(13)中的身管預測角度和的計算結果,以簡單射擊門為身管預測角度的“目標區域”,動態判斷坦克火炮的開火時機,即滿足
由此給出具備身管運動預測能力的射擊門控制邏輯如圖4 所示,圖中給出的射擊門控制邏輯與傳統的簡單射擊門控制邏輯類似,僅在簡單射擊門前端增加了身管運動狀態的預測模型,即引入的判斷變量由原來的身管當前角度替代為角度預測值,該預測值已將擊發時延和身管切向速度的影響考慮在內,且無需考慮身管須處于簡單射擊門內的角度約束。
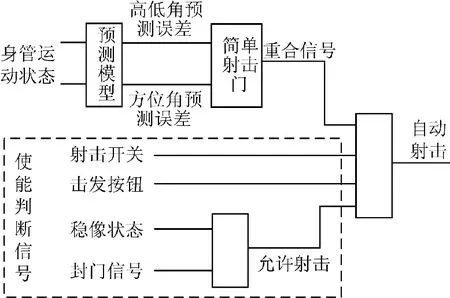
圖4 基于預測模型的射擊門控制邏輯Fig.4 Control logic of firing gate based on the prediction model
需指出,本文對身管在擊發時延內的運動過程做了簡化,僅采用了較為簡單的線性預測模型描述擊發時延內的身管運動過程,這是現有改進射擊門的通用做法[2,7],該簡化處理不會對改進射擊門模型在射擊時機判斷上造成顯著影響。受篇幅和本文研究方向所限,身管運動預測模型可單獨研究,新的預測模型可替換圖4 中的對應模塊,亦對該射擊門的整體控制邏輯不產生影響。
4 數值仿真分析
為驗證預測機制射擊門在射擊時機把握上的合理性,本文通過坦克動力學模型在路面譜激勵下實現身管振動特性的仿真,采取數值分析法對以上各種射擊門決定的射擊時機進行計算和對比分析,驗證本射擊門在射擊時機把握上的優越性。
4.1 坦克系統動力學建模簡介
坦克武器系統主要由坦克底盤和炮塔火炮組成。其中,坦克底盤由車體、車體左右兩側的履帶、車體兩側的多個負重輪,以及連接履帶和負重輪的懸掛裝置組成,懸掛裝置包括減震器、彈性裝置等器件。炮塔火炮部分包括炮塔(含座圈)、火炮身管、炮塔軸承裝置、火炮耳軸起落裝置等,炮塔在座圈回轉平面內相對于坦克底盤做方位旋轉運動,火炮身管在耳軸回轉平面繞耳軸做俯仰運動。
為簡化分析,作如下假設:
1)車體視為剛體,其載荷和負重輪簡化為集中質量和彈簧、阻尼的組合,懸掛裝置簡化為彈簧、阻尼的組合;地面激勵輸入為點輸入,忽略因平衡肘擺動造成的輸入點與車體相對位置的變化,忽略因角振動引起的負重輪相對于車體的位置變化,仿真運算時不考慮車輛的結構振動。
2)火炮系統各部件均視為剛體,不考慮身管、炮尾、搖架之間存在的間隙,以及身管的彎曲變形。
根據以上假設,坦克系統建立下頁圖5 所示的受力結構。
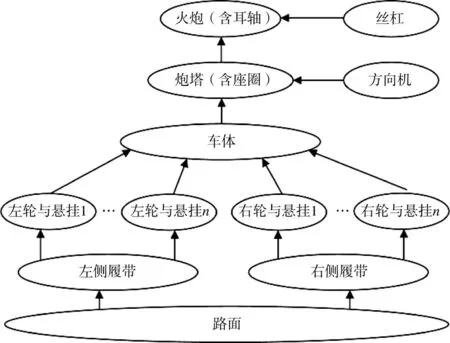
圖5 路面-車體-火炮系統受力結構圖Fig.5 Stressed structure diagram of road-vehicle-artillery system
通過建立圖5 所示的坦克系統各部件的動力學模型(具體各部件動力學建模本文不深入闡述),結合RecurDyn/Control 模塊實現坦克系統的動力學仿真,可獲得不同行進速度和路面等級下的坦克身管振動特性數據。
4.2 射擊時機仿真分析
已知某坦克擊發時延約為10 ms,以30 km/h 的車速對2 000 m 外寬4.0 m×2.0 m 的固定目標實施行進間射擊,高低向及方位向的火炮回轉半徑Rgd=5.5 m,Rfw=6.5 m;其對應的方位向的門限值約為Mθ=0.96 mil,高低向門限值約為Mφ=0.48 mil,其彈丸在飛行距離上的平均飛行速度v=1 600 m/s。
圖6 和圖7 是隨機截取的坦克30 km/h 行進速度下的一段200 s 的身管振動數據,共20 000 個數據點(含高低及方位向身管的角度、角速度、角加速度)。
圖6 身管高低角/角速度/角加速度曲線Fig.6 Curve of elevation/angular velocit/angular acceleration of tank gun barrel
圖7 身管振動方位角/角速度/角加速度曲線Fig.7 Curve of azimuth/angular velocity/angular acceleration of tank gun barrel vibration
基于身管振動數據,對每一數據點分別采用簡單射擊門、延遲門、速度門以及預測射擊門的判斷邏輯來決定該數據點是否為有效射擊點,形成如表1 的統計結果,表中ps為有效射擊時機點數,bl(比率)部分以各類射擊門判斷的有效射擊點數為分子,以簡單射擊門的有效射擊點數為分母,計算的百分比。
表1 不同射擊門對應的射擊時機統計Table 1 Firing opportunity statistical result based on different firing gates
以一次完全穿越過程的身管運動數據為例,其身管運動軌跡如圖8 的圓點跡(身管由下至上運動),簡單射擊門限值如圖8 中紅色矩形框所示。圖8(a)~圖8(d)分別對應基于簡單射擊門、預測射擊門、延遲射擊門,以及速度射擊門模型決定的有效射擊時機(用“×”表示)。由圖8 可知,相對延遲射擊門、速度射擊門對應的射擊時機,預測射擊門的射擊時機更多,且預測射擊門可把握身管尚處于簡單射擊門外的射擊時機,如圖8(b)所示。
圖8 不同射擊門的射擊時機Fig.8 Firing opportunity of different firing gate
由數值仿真的統計結果和單次身管穿越過程對射擊時機的判斷上看,本文給出的基于預測機制的射擊門體制,能更充分地判斷和利用有效的射擊時機,同時能把原本不合理的射擊時機剔除,有利于坦克火控更合理捕捉有效射擊時機,提高坦克高速行進間的射擊效能。
5 結論
本文針對射擊門對高速行進間坦克有效射擊時機的判斷問題,分析了已有射擊門在控制邏輯上的不足,并給出了基于預測機制的射擊門數學模型。通過數理仿真分析,相較簡單射擊門、延遲射擊門和速度射擊門,本文給出的射擊門模型簡單可行,可獲得更多的射擊時機,也能避免無效擊發,這對于提升高速行進間坦克的射擊命中率具有現實意義。
