一種新型雙臂協作消化道手術機器人的結構設計與運動學分析
2024-04-22 09:27:44王盛松張濤程天宇蘇靜杜付鑫
機械工程師 2024年4期
王盛松,張濤,程天宇,蘇靜,杜付鑫,3,4
(1.山東省食品藥品審評查驗中心,濟南 250014;2.山東大學 機械工程學院,濟南 250061;3.高效潔凈機械制造教育部重點實驗室(山東大學),濟南 250061;4.山東大學 控制科學與工程學院,濟南 250061)
0 引言
內鏡下微創手術在早期的診斷和治療方面展現出極大的優勢。相較于傳統的開放性手術,內鏡下微創手術能減少創傷和術中出血、降低手術風險,減輕操作醫生的疲勞度,提高手術的成功率[1]。目前其顯著的醫療診斷和治療優勢受到了廣泛的認可,并且深受患者的青睞[2]。然而內鏡下微創手術經消化道進行,空間狹窄,對醫生的要求較高,限制了其大范圍的應用[3]。
如今,各種手術機器人已經逐漸應用于心臟外科、泌尿外科及骨科手術等方面[4-5]。相較于傳統的內鏡下微創手術,消化道手術機器人輔助下的微創手術具有高靈活性、高柔性及高精度的優勢。但該機器人存在操作臂自由度不足、末端控制信息不準確等問題,目前還未進入臨床應用階段。
連續體機械臂已逐步應用于消化道手術機器人的末端操作臂,連續體機械臂具有尺寸小和高靈活性的特點。連續體機械臂的主要構型有關節式、同心管式、切口式等[6],目前已廣泛應用于醫療[7]、救援[8]、航空航天[9]等領域。不同的連續體構型應用于消化道手術機器人的研究仍需進行更加深入的探索。
本文設計了一種新型雙臂協作消化道手術機器人系統,提出一種基于彈性元件的快速更換裝置,可以在手術中實現夾鉗、剪刀、電刀等多種器械的快速更換。
1 手術機器人系統結構設計
1.1 手術機器人構型選擇
在滿足尺寸要求的情況下,消化道手術機器人的操作臂需要具備較高的負載能力和足夠的自由度。以胃鏡下黏膜剝離術(ESD)為例進行手術機器人的具體需求分析。根據需求本文設計了一種消化道手術機器人系統,機器人結構如圖1所示。該機器人手術系統由內鏡的驅動與執行機構、連續體操作臂的驅動與執行機構和中間傳動機構3部分組成。
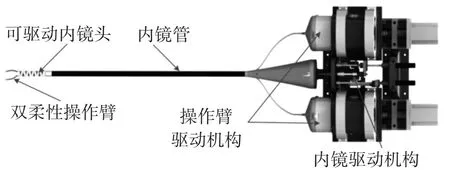
圖1 系統整體示意圖
1.2 可驅動內鏡設計
可驅動內鏡由驅動機構、執行機構及中間傳動機構3部分組成。本文設計了一種可以進行自由彎曲和旋轉的可驅動內鏡,如圖2(a)所示,內鏡末端提供“Y”形通道使操作臂形成環抱式結構。如圖2(b)所示,采用絲驅動連續體結構降低驅動內鏡的尺寸。驅動機構采用圓周分布的滾珠絲杠副,以提供更大的驅動力,并且使用絲鞘機構進行長距離傳動。
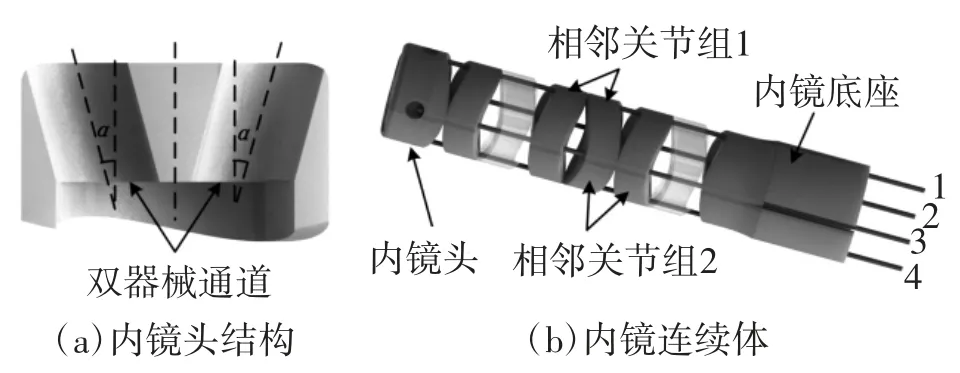
圖2 可驅動內鏡整體結構示意圖
1.3 連續體操作臂設計
本文提出的連續體手術操作臂具有彎曲、旋轉、直線進給及執行機構夾持自由度,并且提出一種快速更換裝置,以實現多種手術器械的快速更換。如圖3所示,快換片一端伸出電動機安裝架,起按鈕作用,卡緊部位設有楔形面,與彈簧配合可以實現自動鎖緊功能。
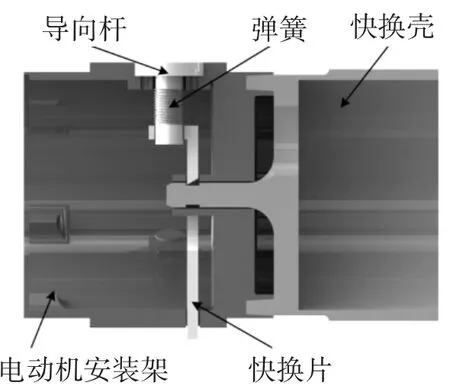
圖3 操作臂快速更換裝置示意
2 運動學分析
本節建立的正運動學模型是針對單段離散關節式連續體,主要內容為實現驅動空間到工作空間的映射。
在對操作臂進行運動學分析時應考慮到內鏡連續體端口處的傾斜角度對連續體操作臂的影響。圖4所示為連續體操作臂彎曲結構示意圖。連續體操作臂具有進給、單方向彎曲及軸向旋轉的自由度,Φm為整體偏轉角度,Θm為彎曲角度。根據常曲率假設,θm為相鄰兩關節之間的夾角,有θm=Θm/(n+1),則驅動絲變化量與彎曲角度的關系如下:
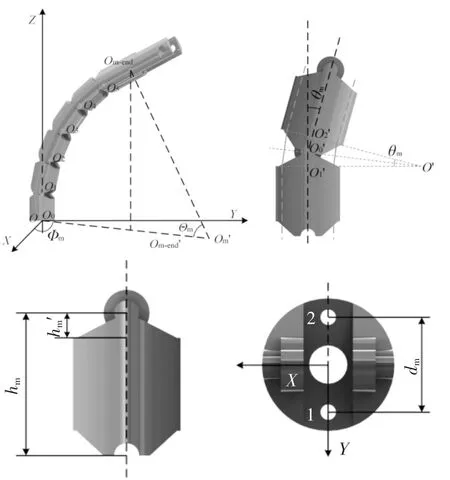
圖4 連續體操作臂彎曲結構示意圖
式中:dL_base與dL_clamp分別為底座與夾鉗基座中穿線孔的長度,lmi_total為第i根驅動絲在連續體操作臂內的長度,Δli為第i根驅動絲的繩長變化量。
連續體操作臂的彎曲情況與末端姿態的關系式如式(2)所示,hbase為底座的底面到其頂端圓柱中心的長度,xend、yend、zend為夾鉗基座末端點的坐標,b為夾鉗基座的姿態向量。
由于操作臂的縱坐標同時受彎曲和進給的影響,縱坐標的逆運動學求解只能用xn或者yn的方程求解:
基于最小二乘法,利用四次方程z=ax4+bx3+cx2+dx+e對軌跡進行擬合,xn、yn、zn的關系為:
其中,Ra為常數。
由三角函數求和公式可得:
將式(6)代入式(5)得
3 仿真分析
本節建立的正運動學模型是針對單段通過分析人體消化道尺寸及常見早期病灶尺寸,可將操作臂的工作空間確定在一個直徑不小于25 mm的球體內[10]。
在連續體內鏡直立時,如圖5(a)所示,雙操作臂的工作空間在坐標系Oe-end的XOZ平面上的投影將直徑為25 mm的圓包含,可滿足設計要求。如圖5(b)所示,雙操作臂的公共工作空間同樣滿足設計要求。

圖5 雙臂工作空間
4 實驗分析與驗證
4.1 運動學模型驗證
為驗證本文提出的正逆運動學算法的準確性,搭建運動學實驗平臺進行驗證。如圖6所示,連續體操作臂的外徑為3.5 mm,穿線孔之間的距離為2.5 mm,連續體操作臂總長度為34.7 mm,磁跟蹤裝置用于獲取連續體操作臂的末端位置。實驗過程中使連續體操作臂從原點出發。反復進行雙向彎曲,兩方向上分別選取9個目標點,各點均位于圖7(a)中的理想軌跡上。根據目標位置的X、Y坐標確定其雙驅動絲的驅動情況,進而得到末端位置,將其與實際位置進行比較。

圖6 運動學實驗裝置

圖7 實驗結果及誤差分析
連續體機械臂雙向彎曲運動時,位置誤差為所取樣點的實際坐標與理想坐標點之間的直線距離,實驗結果表明,連續體操作臂的定位誤差在1.5 mm以內,占總長度的比例小于5%。
4.2 運動性能驗證
為驗證該消化道手術機器人的運動性能,進行單臂操作臂實驗驗證,模擬機器人手術操作過程。如圖8所示,實驗結果顯示,操作臂在平面內做圓周運動時平均運動精度在1 mm以內,本文提出的消化道手術機器人具有較高的軸向傳動精度。
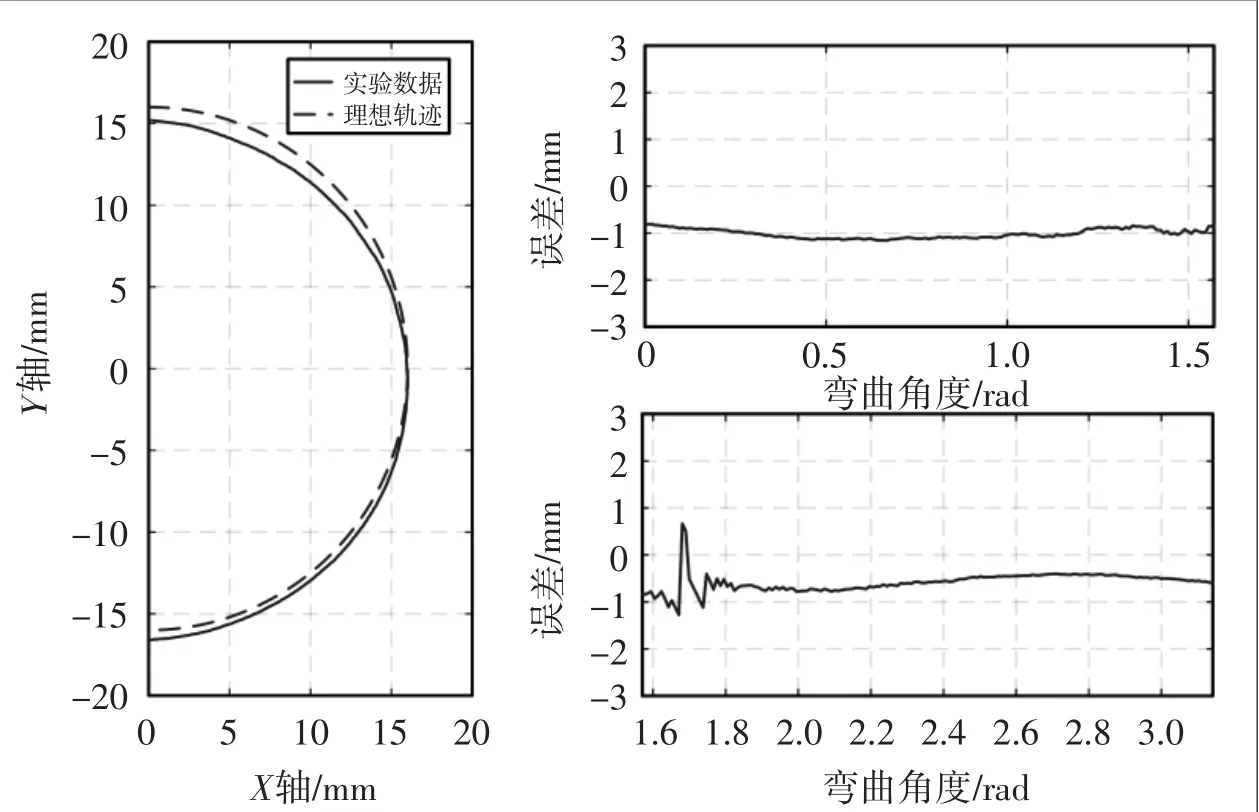
圖8 XOY平面內末端曲線運動及誤差分析
5 結語
消化道手術機器人輔助下的微創手術因其高靈活性、高柔性及高精度的優勢而受到廣大研究人員的關注。本文設計的一種新型雙臂協作消化道手術機器人系統,應用一種基于彈性元件的快速更換裝置。對消化道手術機器人的新構型進行正逆運動學分析,分別對連續體內鏡和連續體機械臂的工作空間進行仿真分析,仿真結果顯示,上述工作空間均能滿足手術機器人的工作空間需求。實驗結果顯示,該消化道手術機器人具有較高的軸向傳動精度,連續體操作臂的定位誤差在1.5 mm以內,表明正逆運動學算法準確性較高。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
河北畫報(2020年10期)2020-11-26 07:20:50
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
中國衛生標準管理(2015年3期)2016-01-14 03:41:47
中國中醫藥現代遠程教育(2014年13期)2014-03-01 04:26:36