房建施工塔機防碰撞的機器視覺監測預警方法
2024-04-24 10:11:29王凱
工程機械與維修 2024年1期
關鍵詞:機器視覺
王凱

摘要:簡要介紹傳統的塔機防碰撞監測預警方法及其不足之處,詳細闡述了房建施工塔機基于機器視覺技術的監測預警方法的技術特點、基礎監測預警指標的設置、布設多層級監測預警節點、建立塔機防碰撞監測預警模型、監測鎖定與監測預警等主要內容,闡述了對該監測預警方法進行測試的目的、測試準備、測試過程及其結果。測試結果表明,采用機器視覺技術對塔機防碰撞進行監測預警方法,效果好、針對性強、誤差可控,具有一定的實際應用價值。
關鍵詞:房建工程;塔機施工;防碰撞;機器視覺;監測預警
0? ?引言
在房建等工程施工中,塔機是十分重要且關鍵的設備,塔機的使用頻率很高。但是在塔機使用過程中,會出現一些操作控制方面的問題,例如塔機碰撞引起塔臂斷裂以及操控系統失靈等。塔機碰撞會引發塔機損壞、材料損失甚至人員傷亡,在一定程度上阻礙了工程進度、影響了工程質量和企業效益。因此塔機必須配備防碰撞監測預警裝置。
1? ?傳統的塔機防碰撞監測預警方法
傳統的塔機防碰撞監測預警方法,如北斗定位塔機防碰撞監測預警方法,塔機與建筑物等周邊物體交會防碰撞監測預警方法等,雖然可以實現預期的任務及目標,但是缺乏針對性與穩定性,在不同的施工環境下,較難進行預警的搭接與點位的鎖定,較容易受到外部環境及特定因素的影響[1]。不僅如此,當前所設計的防碰撞監測預警方法一般是單向的,實際應用測定時的效率較低,可控度不高,影響最終的監測預警結果。
2? ?基于機器視覺技術的監測預警方法
2.1? ?技術特點
為克服上述塔機防碰撞監測預警方法的不足,設計了基于機器視覺技術的房建施工塔機防碰撞監測預警方法并進行了驗證分析。所謂機器視覺技術,主要指的是利用機器代替人眼來做測量和判斷。
將機器視覺技術與塔機防碰撞監測預警方法相融合,擴大了實際預警范圍,形成了更加靈活、多變的預警結構,可從多個角度進行實際監測,推動相關技術和行業邁入一個新的臺階[2]。
2.2? ?基礎監測預警指標的設置
通常情況下,在進行房建施工過程中,塔機的監測預警裝置可以保障其施工過程中的穩定性與可靠性,但是需要進行基礎監測預警指標的設置[3]。這就需要對塔機的實際防撞位置和定向點位進行標定處理,并計算出碰撞的可控制距離,該距離一般設置在0.25~0.3m之間[4]。以此為基礎,依據監測預警的實際需求及標準,進行預警指標與參數的設置。階段性基礎監測預警數值的設置如表1所示。
根據表1完成對階段性基礎監測預警數值的設置,然后以此為基礎,對當前的監測預警環境和條件進行調整調度。需要注意的是,所設計的監測預警標準并不是固定的,可以依據自身的施工需求作出調整,具有較強的靈活性[5]。
2.3? ?布設多層級監測預警節點
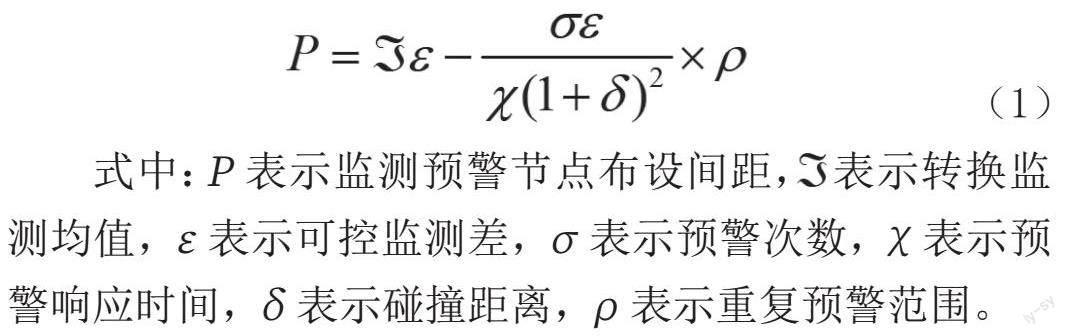
傳統的塔機防碰撞監測預警節點設置方式大多是單向,雖然可以實現預期的預警任務,但是缺乏針對性和穩定性,獲取的預警數值也并不精準可靠[6]。為解決這一問題,結合實際預警需求和標準,將所設計的節點預警方式分為多層級,這樣可以加強對監測情況的多維控制,進一步滿足實際的預警要求。為此,需計算出監測預警節點的布設間距,具體計算如公式(1)所示。
(1)
式中:P表示監測預警節點布設間距, 表示轉換監測均值,ε表示可控監測差,σ表示預警次數,χ表示預警響應時間,δ表示碰撞距離,ρ表示重復預警范圍。
結合當前的測試結果,依據設置的間距,調整節點的具體位置。同時,根據監測位置和預警方向的變化,需將當前的預警標準劃分為多個層級,以便更好地將預警的目標進行匹配,形成相對應的預警關系,為后續數據、信息采集,甚至對異常碰撞位置的標定提供參考。
2.4? ?建立塔機防碰撞監測預警模型
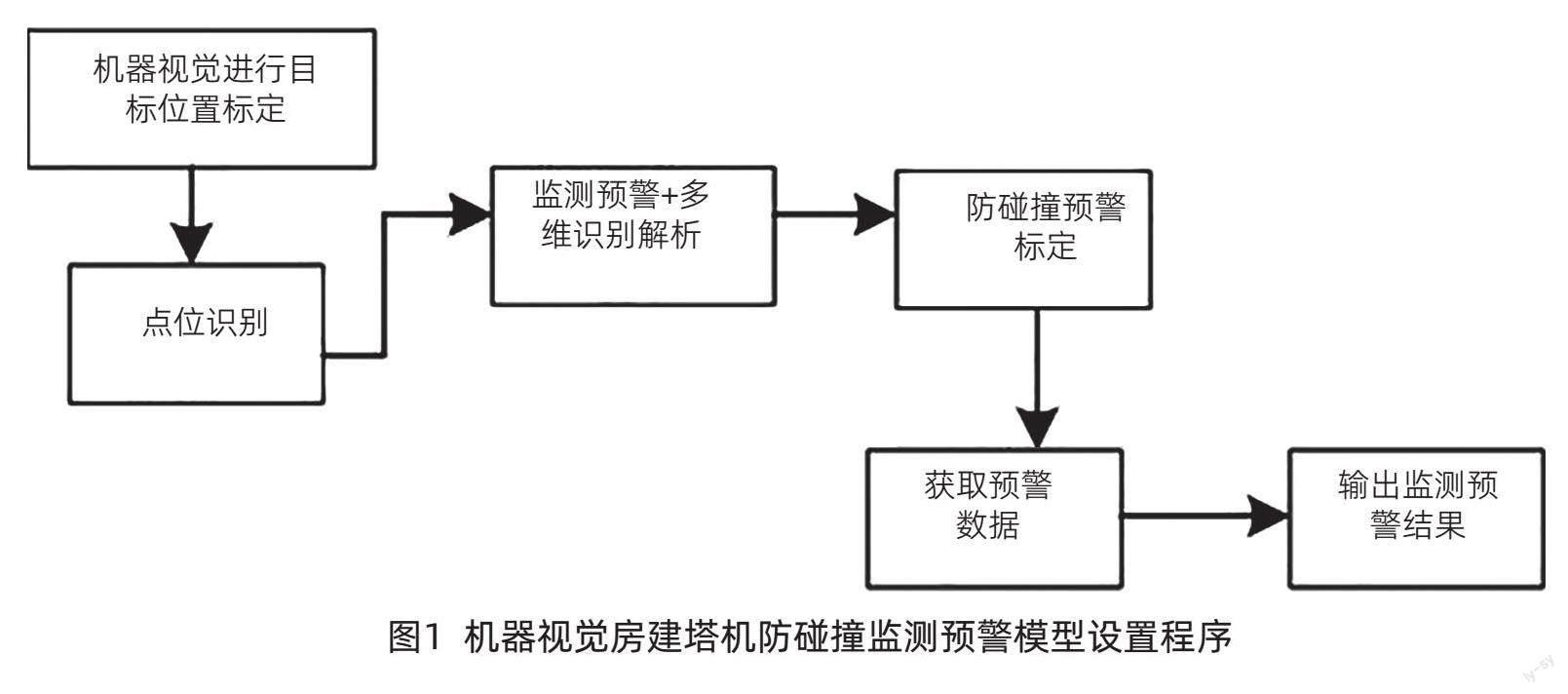
采用機器視覺技術,構建房建施工塔機防碰撞監測預警模型。利用部署的監測預警節點進行數據信息的采集,為此需要在當前的模型中設計一個機器視覺監測矩陣,進行預警限值的計算,并將其設定為預警的限制標準,以構建對應的預警模型結構。機器視覺房建塔機防碰撞監測預警模型設置程序如圖1所示。
根據圖1展示的設置程序,完成對機器視覺房建塔機防碰撞監測預警模型的設計與驗證分析。然后以此為基礎,通過機器視覺技術,處理各個階層的防碰撞監測預警目標,并獲取模糊的預警結果,以待后續進行修正處理。
2.5? ?監測鎖定與監測預警
所謂監測鎖定,主要指的是針對預警模型處理的結果進行修正的一種方式。當前對于塔機防碰撞的位置以及距離進行標定,作為初始鎖定的目標,在實際建設施工的過程中,每一個階段均需要進行對應的鎖定處理,將各個階段的監測鎖定數值進行匯總整合,并利用預警的標準作出比對,以此來消除各個環節的預警誤差,強化預警結果的真實性與可靠性,進一步擴大實際的監測預警范圍,從多個角度保證預警結果的穩定與可靠,營造更為真實的監測預警環境。
3? ?監測預警方法測試
3.1? ?測試目的
此次主要是對基于機器視覺的房建施工塔機防碰撞監測預警方法的實際應用效果進行分析與驗證研究。考慮到最終測試結果的真實性與可靠性,采用對比的方式展開分析,并選定Q房建工程作為測試的主要目標對象。根據當前測定需求及標準的變化,對最終得出的測試結果比照研究。然后綜合機器視覺技術,進行測試環境的關聯與搭建。
3.2? ?測試準備
設定了北斗定位塔機防碰撞監測預警測試組、塔機與建筑物等周邊物體交會防碰撞監測預警測試組,以及機器視覺塔機防碰撞監測預警測試組。
結合機器視覺技術,對選定的Q房建工程作為測試的主要目標,并建立對應的測試環境與內置搭接結構。根據監測預警的需求,可對塔機的應用范圍進行劃定,并在可控的范圍之內進行一定數量監測節點的布設。需要注意的是,監測節點的設定雖然是獨立的,但是實際應用的過程中盡量將節點搭接在一起,以便于后續數據、信息的采集與匯總。
在當前的檢測系統之中接入一個定向的承接識別程序,并在塔機的操控系統之中增設傳感器、聲光報警器、記錄儀以及外側傳感器等輔助設備。接下來,進行預警監測指標及參數的設置,如表2所示。
根據表2,完成對預警監測指標及參數的設置與分析。以此為基礎,通過機器視覺技術設計一個多層級的監測預警結構,并導入制定的預警目標,完成基礎測試環境及條件的設置,然后綜合機器視覺技術,進行具體的測試與驗證。
3.3? ?測試過程及結果分析
在上述搭建的測試環境之中,結合機器視覺技術,對選定的Q房建工程進行測試與驗證。因為該工程的覆蓋面積較大,所以塔機的應用范圍會更廣一些。將塔機的應用測定區域劃分為4個,并利用各個區域設置的節點進行基礎數據、信息的采集,預設監測預警的對應周期,以待后續使用。利用設定的傳感器及聲光報警器等裝置,首先進行防碰撞報警距離的測試,得出以下數據結果如表3所示。
根據表3,完成對塔機防碰撞報警距離的設置,依據上述情況,利用機器視覺技術,設置可控的視覺監測預警范圍,并分析計算出最終的單元監測預警耗時,具體如公式(2)所示:
(2)
式中:D表示單元監測預警耗時,m表示可控監測范圍,n表示視覺識別區域,u表示識別預警次數,χ表示機器視覺標定距離。結合當前的測定,完成對測試結果的分析,如圖2所示。
根據圖2完成對測試結果的分析。對塔機與建筑物等周邊物體交會進行防碰撞監測預警測試對比,此次所設計的機器視覺塔機防碰撞監測預警測試組,最終得出的單元監測預警耗時被控制在0.2s以下,這說明在機器視覺技術的輔助下,所設計的監測預警方法效果更佳、針對性更強、誤差可控,具有實際的應用價值。
4? ?結束語
綜合上述分析可知,將設計的基于機器視覺的房建施工塔機防碰撞監測預警模式,與傳統的塔機防碰撞監測預警模式對比。前者在機器視覺技術的輔助與支持下,所設計的監測預警結構更為多元化、穩定化,自身針對性得到了極大地提升。
基于機器視覺的房建施工塔機防碰撞監測預警模式,可在不同的工程施工背景下,對塔機的可應用位置進行多維標定。利用過程中獲取準確的數據和位置信息,有利于優化預警結構,提升預警精度,給予塔機操作人員提供更為精準可靠的預警信號,從多方面保證塔機群的安全作業。
參考文獻
[1] 胡艷,馮晶晶,姚杰.V2X技術在城市交叉口防碰撞預警中
的應用[J].西華大學學報(自然科學版),2022,41(3):85-92.
[2] 王文,楊昆,何云,等.煤-氣交叉開采區天然氣井防碰撞
預警技術研究[J].礦業科學學報,2022,7(4):490-497.
[3] 彭飛,王艷梅,鳳鵬飛.冰雪天氣下基于GIS的車輛防碰撞
預警模型[J].武漢輕工大學學報,2022,41(2):97-101.
[4] 李永山,劉發永,梁勇,等.基于馬爾可夫過程的水電工程
門塔機群防碰撞預警分析技術[J].四川水利,2021,42(5):
33-36.
[5] 顧昊倫,王軍年,邱鵬鋮,等.基于RFID車-車通信的防
碰撞預警系統設計[J].現代交通技術,2021,18(3):68-73.
[6] 周駱,劉鎮.基于深度學習的多源數據融合下的汽渡防碰撞
預警方法[J].艦船電子工程,2021,41(4):150-155.
猜你喜歡
軟件導刊(2016年11期)2016-12-22 21:52:17
電腦知識與技術(2016年28期)2016-12-21 12:13:14
科技視界(2016年26期)2016-12-17 17:31:58
科技視界(2016年25期)2016-11-25 19:53:52
科技視界(2016年25期)2016-11-25 09:27:34
科教導刊(2016年25期)2016-11-15 17:53:37
軟件工程(2016年8期)2016-10-25 15:55:22
科技視界(2016年20期)2016-09-29 11:11:40
科技視界(2016年6期)2016-07-12 09:12:40
科技視界(2016年15期)2016-06-30 19:03:30