基于新型旋轉(zhuǎn)直線往復(fù)機構(gòu)的切片機設(shè)計分析及參數(shù)優(yōu)化
2024-05-08 07:05:19胡福清孫江宏孫英杰孫雨彤馬超周福強
中國機械工程 2024年4期
胡福清 孫江宏 孫英杰 孫雨彤 馬超 周福強


摘要:
針對現(xiàn)有糕點切片機切片效率和質(zhì)量低下的問題,進行基于新型旋轉(zhuǎn)直線往復(fù)機構(gòu)的切片機設(shè)計分析及參數(shù)優(yōu)化。首先對切片機構(gòu)型設(shè)計及橢圓導(dǎo)軌長短徑比和轉(zhuǎn)速進行計算,然后進行運動學(xué)和靜力學(xué)分析,接著分別在不同長短徑比和轉(zhuǎn)速動力學(xué)仿真分析基礎(chǔ)上,構(gòu)建切刀的加速度均值和均方根值三次多項式擬合方程作為目標(biāo)函數(shù),利用NSGA-Ⅱ遺傳算法進行長短徑多目標(biāo)參數(shù)優(yōu)化及轉(zhuǎn)速擇優(yōu),最后搭建樣機完成不同轉(zhuǎn)速對比實驗及玉米餅切片性能測試。結(jié)果表明,最優(yōu)長短徑和轉(zhuǎn)速分別為190 mm、120 mm和20 r/min,優(yōu)化后切刀效率提高75%,切刀進刀加速度的最大和平均誤差分別減小26%和49%,退刀加速度的最大和平均誤差分別減小60%和63%,玉米餅切面整齊美觀,驗證了設(shè)計的可行性。
關(guān)鍵詞:切片機;新型旋轉(zhuǎn)直線往復(fù)機構(gòu);運動學(xué)分析;多目標(biāo)優(yōu)化
中圖分類號:TP23;TP202
DOI:10.3969/j.issn.1004132X.2024.04.005
開放科學(xué)(資源服務(wù))標(biāo)識碼(OSID):
Design and Parameter Optimization of Slicing Machines Based on New
Rotary-straight Line Reciprocating Mechanisms
HU Fuqing1? SUN Jianghong1,2? SUN Yingjie1? SUN Yutong1? MA Chao1,3? ZHOU Fuqiang1,3
1.School of Mechanical Electrical Engineering,Beijing Information Science & Technology
University,Beijing,100192
2.Institute of Mechatronic Engineering,Tsinghua University,Beijing,100084
3.Key Laboratory of Modern Measurement and Control Technology,Ministry of Education,Beijing
Information Science and Technology University,Beijing,100192
Abstract: Aiming at the problems of low slicing efficiency and quality of the existing pastry slicing machines, the design analysis and parameter optimization of a slicing machine was carried out based on the new rotary-linear reciprocating mechanisms. Firstly, the design of the slicing mechanisms and the calculation of the length-diameter ratio and speed of the elliptical guide rail was carried out. Secondly, the kinematics and the statics analyses were carried out, then, based on the simulation analysis of different aspect ratios and rotational speed dynamics, the cubic polynomial fitting equation of the mean and root mean square value of the cutter acceleration was constructed as the objective function. The NSGA-Ⅱ genetic algorithm was used to optimize the long and short diameter multi-objective parameters, and the rotational speed was selected. Finally, a prototype was built to complete the comparative experiments of different speeds and the performance tests of corn cake slices. The results show that the optimal long and short diameters and rotation speeds are as 190 mm, 120 mm and 20 r/min respectively. After optimization, the cutter efficiency is increased by 75%, the maximum and average errors of the cutter feeding acceleration are reduced by 26% and 49% respectively, and the maximum and arerage errors of retract acceleration are reduced by 60% and 63% respectively. The corn cake section is neat and beautiful, which verifies the feasibility of the design.
Key words: slicing machine; new rotary-linear reciprocating mechanism; kinetics analysis; multi-objective optimization
收稿日期:20230704
基金項目:國家重大科學(xué)儀器專項(2014YQ24044504);2019年產(chǎn)業(yè)技術(shù)基礎(chǔ)公共服務(wù)平臺項目(0714EMTC000898)
0? 引言
糕點是以谷類、豆類、薯類等食材中一種或幾種為主要原料,經(jīng)調(diào)制、成型、熟制等工序制成的食品[1-2],為廣大人民群眾所喜愛。在糕點生產(chǎn)加工過程中需要對其切片后才能進行包裝,故切片是糕點制作工藝的重要環(huán)節(jié)[3-4]。
目前常用于糕點和果蔬切片的有傳統(tǒng)手工和機器兩種方式。傳統(tǒng)手工[5]存在切片效率低、人力成本高和切片厚度不一致等多種缺點,且美觀性也遠不如機器切片。但是,現(xiàn)有的切片機仍存在效率低[6]、切痕傾斜和轉(zhuǎn)速不匹配[7]導(dǎo)致切片整齊度和均勻度下降等問題,影響糕點品質(zhì)[8]。因此,研究一種高效高質(zhì)切片機具有重要意義[9-11]。國內(nèi)外對切片機已有相關(guān)研究。MEI等[12]設(shè)計了一種水果蔬菜切片機,分別采用高速滾筒和圓盤工具進行果蔬傳送和切片,從而通過連續(xù)切割提高切片效率,10~12 mm不同切片厚度實驗結(jié)果表明,切片厚度相對誤差隨厚度增大而減小。THANGDEE等[13]設(shè)計了一種檸檬草切片機,通過旋轉(zhuǎn)刀具實現(xiàn)快速切割,采用豎直和傾斜兩種傳料方式,工作效率分別達48.9 kg/h、35 kg/h,但以上傳送方式僅適用于水果類質(zhì)地較硬物體,對柔軟類物體易造成變形。針對柔軟物體傳送,HUANG等[14]設(shè)計了一種在圓盤上布置的有4種形狀刀片可更換、切片厚度可調(diào)的切菜機,通過主軸帶動圓盤與刀片旋轉(zhuǎn)切片,并采用彈簧壓縮擋板方式進行蔬菜傳送,實現(xiàn)了機器自動切割,但采用彈簧壓縮方式不能精確控制傳送量。LEI等[15]設(shè)計的切菜機通過電機帶動刀軸轉(zhuǎn)動刀片,同時推盤在絲杠作用下將蔬菜傳送至切片位置,通過電機轉(zhuǎn)動一圈帶動雙半圓中心對稱結(jié)構(gòu)的刀片切片兩次提高切片效率。但以上旋切式切片對塊狀柔軟類物體不易實施[16-18]。目前對糕點等柔軟物體切片研究較少,QIU等[19]設(shè)計了一種通過棘輪機構(gòu)間歇傳送實現(xiàn)切片厚度可調(diào)的糕點切片機,其切片厚度受棘輪齒尺寸影響無法實現(xiàn)精確調(diào)控,且棘輪傳送易造成傳送帶振動,降低切片美觀性。ODIOR[20]設(shè)計了一種切片厚度為5 mm不可調(diào)的面包切片機,但一個切片周期長達12 s。
基于新型旋轉(zhuǎn)直線往復(fù)機構(gòu)的切片機設(shè)計及參數(shù)優(yōu)化——胡福清? 孫江宏? 孫英杰等
中國機械工程 第35卷 第4期 2024年4月
相較現(xiàn)有旋切式切片機難以滿足糕點類柔軟物體切片需求,往復(fù)式切片能很好地保證糕點切片和傳送互不干涉且更加滿足塊狀糕點整齊度和均勻度需求。目前往復(fù)式切片采用凸輪轉(zhuǎn)子和連桿帶動刀片上下往復(fù)運動,切片效率相較人工切片效率得到提升。橢圓轉(zhuǎn)子為軸對稱兼具中心對稱的特殊結(jié)構(gòu),相較于凸輪轉(zhuǎn)子通過半徑改變進而帶動刀片運動具有雙倍功效。FAN[21]設(shè)計了一種橢圓齒輪驅(qū)動的雙旋翼發(fā)動機,通過輸出軸連接橢圓齒輪將圓形齒輪的輸入增加為兩倍后進行輸出,仿真試驗發(fā)現(xiàn),轉(zhuǎn)子速度和傳動效率隨長半軸偏心輪增大而增大。因此,橢圓轉(zhuǎn)子在功率和效率輸出上更具優(yōu)勢[22]。同時,剪式機構(gòu)因其可展性與承載性好、組裝方便等特點常用于直線展開升降操作[23-25],因此將其與橢圓轉(zhuǎn)子結(jié)合進而完成往復(fù)式切片動作,研究橢圓轉(zhuǎn)子與剪式機構(gòu)對提高切片效率和質(zhì)量影響具有重大創(chuàng)新意義。
本文針對現(xiàn)有切片機切片質(zhì)量和效率低下問題,通過橢圓導(dǎo)軌剪叉機構(gòu)進行往復(fù)式切片研究,提出一種基于新型旋轉(zhuǎn)直線往復(fù)機構(gòu)的切片機。首先在構(gòu)型設(shè)計及參數(shù)計算基礎(chǔ)上進行靜力學(xué)和動力學(xué)分析,接著通過不同長短徑比和轉(zhuǎn)速動力學(xué)仿真分析構(gòu)建優(yōu)化目標(biāo)函數(shù),利用NSGA-Ⅱ遺傳算法對長短徑比多目標(biāo)參數(shù)優(yōu)化及轉(zhuǎn)速擇優(yōu),最后搭建樣機進行不同轉(zhuǎn)速實驗對比分析,驗證設(shè)計的可行性。
1? 構(gòu)型設(shè)計及理論分析
1.1? 設(shè)計要求
經(jīng)市場調(diào)研,目前常見面包等糕點尺寸長×寬×厚度分別為(30~100)mm×(30~100)mm×(5~80)mm,此類糕點現(xiàn)有機器切片效率為10切/min。本文針對此類糕點設(shè)計一種切片高度為10 mm、切片效率不小于10切/min的切片機,同時,為保證糕點均勻度和整齊度,要求切片和傳送兩個運動循環(huán)交替進行。
1.2? 構(gòu)型設(shè)計及參數(shù)確定
1.2.1? 構(gòu)型設(shè)計
本文基于橢圓導(dǎo)軌剪叉機構(gòu)設(shè)計了一款新型旋轉(zhuǎn)直線往復(fù)運動的切片機,如圖1所示。橢圓導(dǎo)軌通過V形帶由電機2驅(qū)動,并將電機轉(zhuǎn)動轉(zhuǎn)換為切刀豎直往復(fù)移動,同時引入導(dǎo)向裝置保證切口整齊度。傳送帶由電機1驅(qū)動,實現(xiàn)糕點恒定速度水平間歇傳送,從而保證切片均勻度。
1.2.2? 橢圓導(dǎo)軌剪叉機構(gòu)理論分析及參數(shù)確定
根據(jù)圖1所示整機結(jié)構(gòu)建立橢圓導(dǎo)軌剪叉機構(gòu),其運動簡圖見圖2。
該機構(gòu)活動構(gòu)件個數(shù)m=8,低副個數(shù)pl=10,高副個數(shù)ph=3,則該機構(gòu)自由度
F=3m-2pl-ph=3×8-2×10-3=1(1)
因此單個電機驅(qū)動滿足工作要求。基于糕點10 mm厚度要求對橢圓導(dǎo)軌長短徑和連桿長度進行設(shè)計,切片行程
s=l2-R21-l2-R22≥10(2)
式中,l為連桿長度;R1為橢圓導(dǎo)軌短半徑;R2為橢圓導(dǎo)軌長半徑。
為減小機構(gòu)振動,設(shè)置橢圓長短徑尺寸相近,本設(shè)計中橢圓導(dǎo)軌長短徑分別為160 mm和150 mm,長短徑比為1.07。設(shè)計連桿長度為220 mm,由式(2)求得切片行程為10 mm,滿足工作需求。
1.3? 單周雙切工作原理
切片過程需考慮切片運動與糕點傳送耦合關(guān)系,因此本文提出一種單周雙切與間歇傳送耦合工作機制,如圖3所示。
連桿上端均處于橢圓導(dǎo)軌長徑的位置為切刀退刀極限位置①,連桿上端均處于短徑的位置為切刀進刀極限位置②。以橢圓導(dǎo)軌長短徑之差為輸入,切刀切片行程③為輸出,根據(jù)長徑和短徑周期性變化交替控制①和②,基于橢圓導(dǎo)軌剪叉機構(gòu)將輸入的旋轉(zhuǎn)運動轉(zhuǎn)換為直線往復(fù)運動,實現(xiàn)往復(fù)式切片工作。由于橢圓導(dǎo)軌每轉(zhuǎn)動一周分別經(jīng)過兩次長短徑位置,故橢圓導(dǎo)軌每轉(zhuǎn)動一周切刀切片兩次,從而實現(xiàn)切片機單周雙切工作機制。
2? 運動學(xué)及靜力學(xué)分析
2.1? 運動學(xué)分析
橢圓導(dǎo)軌剪叉機構(gòu)帶動切刀進行豎直往復(fù)切片運動,其運動性能好壞對切片質(zhì)量產(chǎn)生重要影響,故建立該機構(gòu)坐標(biāo)系進行運動學(xué)分析,如圖4所示。
以橢圓中心O為坐標(biāo)系原點,由圖4可知,橢圓導(dǎo)軌轉(zhuǎn)動時點A和點B做水平方向往復(fù)直線運動,當(dāng)其轉(zhuǎn)動一定角度θ到點P(x0,y0)時,點A和點B分別運動到A′和B′,此時點E運動到點G,切刀質(zhì)心由點K運動到點H。
根據(jù)已知參數(shù),由下式可得任意時刻t下橢圓轉(zhuǎn)動角度:
θt=2πnt(3)
式中,n為橢圓導(dǎo)軌轉(zhuǎn)速。
進而由下式確定橢圓導(dǎo)軌任意點P與圓心距離:
ρt=R1R2(R2sin θt)2-(R1cos θt)2(4)
式中,ρt為P點極半徑。
對ρt求二階導(dǎo)可得到任意點P加速度:
aP=ρ¨t(5)
基于兩連桿在橢圓導(dǎo)軌上運動的對稱性,可知A′O與OB′距離相等,且A與D及B與E分別對應(yīng)的橫坐標(biāo)相同,從而確定點G的坐標(biāo)(xG,yG)為
xG=ρt(6)
yG=l2-4ρt(R2sin θt)2-(R1cos θt)2(7)
根據(jù)剛體運動理論,進一步解得t時刻質(zhì)心點H坐標(biāo):
xH=0
yH=l2-4ρt(R2sin θt)2-(R1cos θt)2+d(8)
對質(zhì)心坐標(biāo)表達式(式(8))進行t的一階和二階求導(dǎo),分別得到速度和加速度:
vyH=
8πnR1R2(R21+R22)sin θtcos θtl2-4R1R2(R2sin θt)2-(R1cos θt)2[(R2sin θt)2-(R1cos θt)2]2(9)
ayH=
16R1R2π2n2(R21+R22)(cos θ2t-sin θ2t)l2-4R1R2(R2sin θt)2-(R1cos θt)2[(R2sin θt)2-(R1cos θt)2]2-
64R21R22π2n2(R21+R22)2(cos θtsin θt)23l2-4R1R2(R2sin θt)2-(R1cos θt)2[(R2sin θt)2-(R1cos θt)2]4-
64R1R2π2n2(R21+R22)(cos θ2tsin θ2t)l2-4R1R2(R2sin θt)2-(R1cos θt)2[(R2sin θt)2-(R1cos θt)2]3(10)
2.2? 靜力學(xué)分析
橢圓導(dǎo)軌剪叉機構(gòu)工作中切刀切割糕點所需的力由AE和BD兩根連桿傳遞,切刀進刀和退刀兩個極限位置受力情況對整機沖擊和振動至關(guān)重要,因此構(gòu)建其力學(xué)模型,因機構(gòu)為左右對稱結(jié)構(gòu),故取連桿BD進行靜力學(xué)分析,如圖5所示。
橢圓導(dǎo)軌順時針轉(zhuǎn)動下,點B水平向左、點C豎直向下、點D水平向右運動,C為連桿鉸鏈位置剛體BD上一點。根據(jù)剛體力學(xué)平移原理,C處受力將沿連桿傳至點D,最終帶動點K豎直向下做加速度為aH的加速運動。由2.1節(jié)運動學(xué)分析結(jié)果可得K點力學(xué)表達:
FK=m1aH=2(FDy-FND)(11)
式中,m1為切刀質(zhì)量;aH為切刀加速度;FDy為FD沿y軸分力;FND為D點支撐力。
對點D進行受力分析可得
FDxFDy=FDcosβ2sinβ2(12)
fDFDx=μmDFNDaP+0fD(13)
式中,F(xiàn)D為點D受力;μ為點D與切刀摩擦因數(shù);mD為點D(刀片滑塊)質(zhì)量;fD為點D所受摩擦力;β為連桿間夾角;aP為橢圓上任意點P瞬時加速度,其數(shù)值與B、D兩點水平加速度aB、aD相等。
對桿BD受力分析得
FB=FDcosβ2(14)
FC=FDsinβ2(15)
式中,F(xiàn)B為點B受力;FC為點C受力。
整理得點D受力表達式及fD為
FD=mDaB-12μm1aHcosβ2-μsinβ2(16)
fD=μmDaBsinβ2-12μm1aHcosβ2cosβ2-μsinβ2(17)
進而得到點B和點C受力表達式:
FB=mDaB-12μm1aHcosβ2-μsinβ2cosβ2(18)
FC=2mDaB-μm1aHcosβ2-μsinβ2sinβ2(19)
由于切刀從糕點切入位置運動至退刀極限位置過程中,夾角β變?yōu)樽钚≈岛笤僭龃螅虼耍墒剑?6)可知切刀加速度也呈先減小后增大的規(guī)律。當(dāng)連桿材料為鋁合金時,工程上常取摩擦因數(shù)為0.5,故連桿加速度方向變化臨界角β′=126.86°,大于該角度時加速度數(shù)值小于0(加速度方向向下)。
3? 動態(tài)性能仿真及多目標(biāo)參數(shù)優(yōu)化
3.1? 基于設(shè)計的長短徑比和轉(zhuǎn)速動力學(xué)仿真
為分析本文設(shè)計的機構(gòu)動態(tài)性能,將橢圓導(dǎo)軌剪叉機構(gòu)長短徑比為1.07的簡化模型導(dǎo)入ADAMS進行動力學(xué)仿真。根據(jù)各零件配合關(guān)系添加約束副,添加橢圓導(dǎo)軌滑塊與橢圓導(dǎo)軌內(nèi)外環(huán)的接觸力,并設(shè)置動摩擦因數(shù)為0.1、穿透深度為0.1 mm、力指數(shù)為2.2、阻尼為10 N·s/mm,各部件質(zhì)量屬性均配置為鋼,添加驅(qū)動轉(zhuǎn)速為5 r/min,進而設(shè)置整機工作周期12 s為仿真時間、步長為0.01 s,得到切刀位移、速度和加速度曲線如圖6所示。
由圖6可知,轉(zhuǎn)速5 r/min、長短徑比1.07下切刀每個周期切片兩次且工作行程為10 mm,與理論計算一致。位移和速度均為周期性連續(xù)光滑變化,切刀第3 s和第9 s切入時最大加速度為5 mm/s2且無突變產(chǎn)生,第6 s退刀處最大加速度為-4.5 mm/s2,中間產(chǎn)生小幅波動,原因是此時兩連桿夾角最小,運動阻力加大造成小幅機械振動,但此時為退刀狀態(tài)對切片不造成影響。
綜上,在設(shè)計的長短徑下切片機滿足工作要求。為進一步得到更優(yōu)性能,對橢圓導(dǎo)軌剪叉機構(gòu)不同長短徑比和轉(zhuǎn)速下的性能進行對比分析。
3.2? 不同長短徑比下切刀動態(tài)性能分析
以20 mm為一個單位增大長半徑和縮小短半徑,分別構(gòu)建橢圓導(dǎo)軌剪叉機構(gòu)3種不同長短徑比模型并導(dǎo)入ADAMS中,設(shè)置與3.1節(jié)相同參數(shù)后進行轉(zhuǎn)速5 r/min下的動力學(xué)仿真,參數(shù)見表1,得到切刀位移和加速度分別如圖7和圖8所示。
由圖7可知,不同長短徑比下位移均呈周期性連續(xù)光滑變化,隨著長短徑比R從1.07增為1.82,切刀位移相應(yīng)由10 mm增至99.8 mm,均在第3 s和第9 s達到最大切片行程,第6 s處切刀返回初始位置并準(zhǔn)備進入下一切片周期,因此單次切片總時間為6 s。
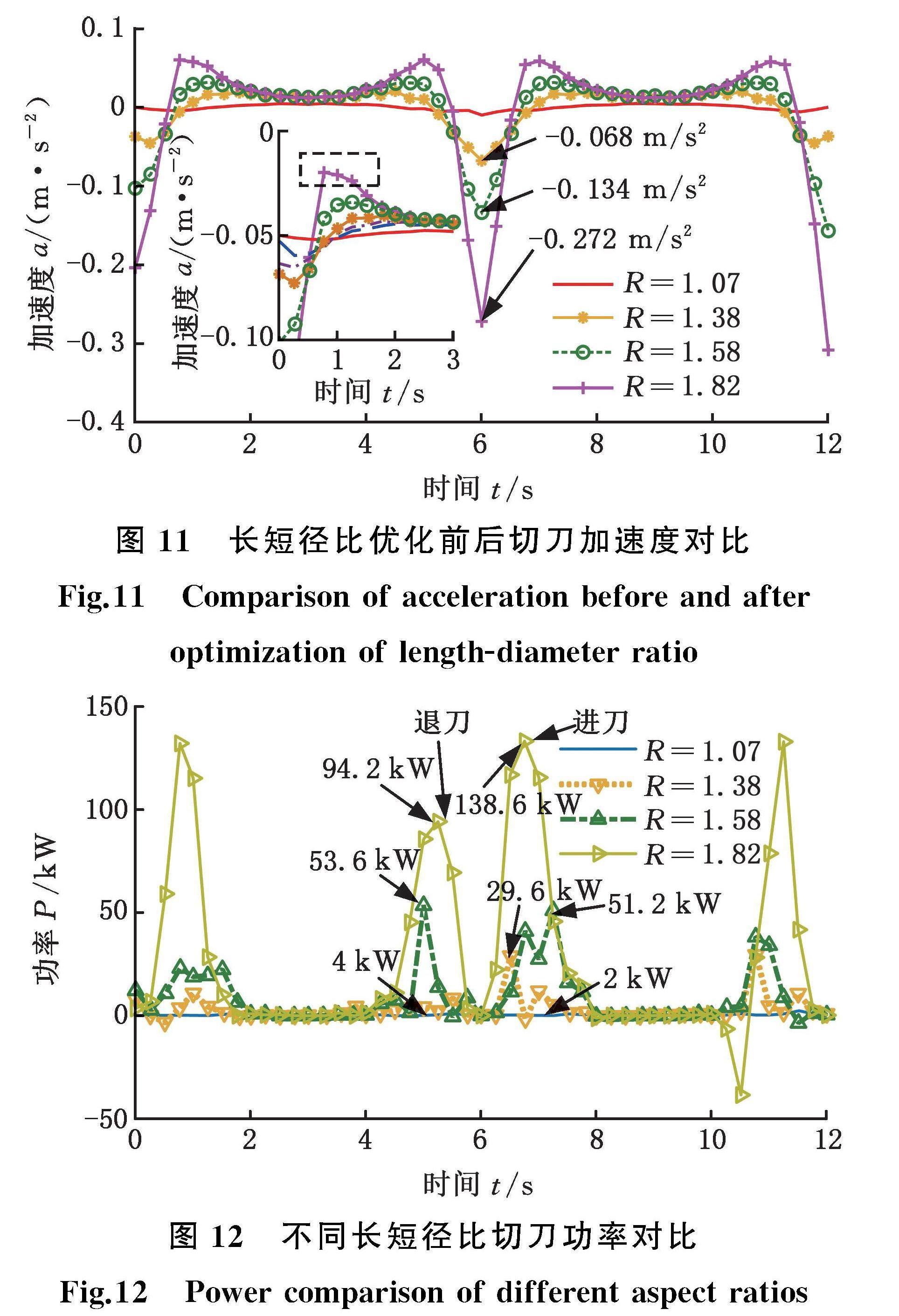
由圖8可知,不同長短徑比下切刀加速度均周期性連續(xù)變化,0~3 s段均先以較大變加速度增速至峰值,再以較小變加速度緩慢降速后進行切片,而后按相反規(guī)律進行退刀以完成一次切片工作。加速度隨長短徑比增大而增大且波動愈加明顯,長短徑比為1.82時最大退刀加速度為-0.272 m/s2,而長短徑比為1.38時該值僅為-0.068 m/s2,表明長短徑比超過一定值后退刀極限位置加速度增大明顯,進而導(dǎo)致切刀退至極限位置產(chǎn)生沖擊,加快橢圓導(dǎo)軌及連桿磨損,降低切片質(zhì)量。以長短徑比1.82為例并根據(jù)連桿長度220 mm計算,兩連桿夾角變化范圍為60°~130°,此時切刀工作到切入位置加速度變化較緩慢,而退刀至退刀極限位置加速度變化急促,此時易發(fā)生沖擊現(xiàn)象,該變化規(guī)律由連桿加速度方向臨界角β′變化造成退刀角度區(qū)間較小導(dǎo)致,驗證了2.2節(jié)靜力學(xué)理論推導(dǎo)的正確性。因此,在工程上可采取減小連桿長度或增大長徑長度的措施來同時增大最大夾角和最小夾角從而使夾角范圍右移,減少沖擊破壞。
因此,本文橢圓導(dǎo)軌剪叉機構(gòu)滿足工作要求并具有空行程快行、工作行程慢行高效工作特點。
3.3? 基于NSGA-Ⅱ遺傳算法的長短徑參數(shù)優(yōu)化
橢圓導(dǎo)軌長短徑是影響整機性能的重要參數(shù),通過設(shè)置合適的長短徑可進一步得到更佳的切片性能。因此,在上文研究橢圓導(dǎo)軌剪叉機構(gòu)不同長短徑比對整機性能影響的基礎(chǔ)上,以切刀加速度的均值和均方根值為性能響應(yīng)進行最優(yōu)參數(shù)優(yōu)化,分別得到不同長短徑比R對整機性能的影響,如圖9所示。
n=5 r/min)
whole machine(R=1.07~1.82,n=5 r/min)
不同長短徑比下均值和均方根值三次多項式擬合方程分別為
f1(x)=0.2805R3-11.3405R2+24.6523R-13.6175(20)
f2(x)=44.0809R3-99.0448R2+112.7941R-57.2213(21)
NSGA-Ⅱ遺傳算法具有運行速度快、收斂性高的優(yōu)點,適用于本文多目標(biāo)參數(shù)優(yōu)化,可提高優(yōu)化效率。在MATLAB環(huán)境下搭建優(yōu)化架構(gòu),定義橢圓導(dǎo)軌長徑R2、短徑R1和桿長l約束變量如下:
160 mm≤R2≤200 mm(22)
110 mm≤R1≤150 mm(23)
220 mm≤l≤240 mm(24)
基于不同長短徑比下均值(式20)和均方根值(式21)三次多項式擬合方程構(gòu)建目標(biāo)函數(shù),構(gòu)建的遺傳算法種群系數(shù)為0.3,種群大小為300,初始和截止迭代次數(shù)均為200,迭代自適應(yīng)偏差為10-10,得到Pareto最優(yōu)解如圖10所示,優(yōu)化過程如表2所示。
由圖9、圖10可知,均方根值隨長短徑比增大單調(diào)增大,而均值先從0.2 mm/s2減小到0再從0反向增至-4.6 mm/s2,且①②③三段遞增
趨勢逐漸增大。根據(jù)表2,不同長短徑下目標(biāo)函數(shù)f1(R)相較f2(R)在數(shù)值大小上變化更加明顯,表明加速度均值f1(R)對性能表達相應(yīng)更具代表性,在長徑190.10 mm、短徑120.04 mm下目標(biāo)函數(shù)f1(R)取得極小值0.02。因此最優(yōu)長短徑分別取整為190 mm、120 mm,長短徑比為1.58。
基于優(yōu)化長短徑比構(gòu)建模型進行動力學(xué)仿真,通過ADAMS后處理模塊得到5 r/min下不同長短徑比下切刀的加速度和功率變化分別如圖11和圖12所示。
由圖11可知,長短徑比優(yōu)化為1.58后切刀在進刀和退刀處加速度變化更加光滑,在長徑和短徑數(shù)值大小變化相同情況下,優(yōu)化后退刀極限位置加速度-0.134 m/s2相較長短徑比1.38的-0.068 m/s2增率為97%,長短徑比1.82退刀極限位置加速度-0.272 m/s2相較優(yōu)化后長短徑比1.58的增率為103%,前者較后者小表明優(yōu)化后整機速度變化將更加平穩(wěn)、運行更加流暢。
圖12顯示切片機功率隨長短徑比增大而增大,優(yōu)化后退刀最大功率由4 kW增至53.6 kW,增加了49.6 kW,進刀最大功率由2 kW增至51.2 kW,增加了49.2 kW,相較于設(shè)計長短徑比功率明顯增大。
3.4? 不同轉(zhuǎn)速下切刀動態(tài)性能分析
橢圓導(dǎo)軌長短徑比和轉(zhuǎn)速均為影響整機性能的重要參數(shù),且切片效率與轉(zhuǎn)速成正比關(guān)系,因此進一步研究橢圓導(dǎo)軌剪叉機構(gòu)長短徑比為1.58時在不同轉(zhuǎn)速下的動態(tài)性能,得到切刀位移與加速度曲線分別如圖13和圖14所示,不同轉(zhuǎn)速仿真下切刀運動參數(shù)如表3所示。
由圖13可知,單位時間內(nèi)切刀次數(shù)隨轉(zhuǎn)速增大而增加,且在切片處均出現(xiàn)速度增大現(xiàn)象。
由圖14可知,切刀加速度與波動幅度均隨轉(zhuǎn)速增大而增大,切刀向下運動過程中,轉(zhuǎn)速在10,15,20 r/min下工作位置加速度均不超過0.25 m/s2,且20 r/min下加速度變化周期性較好、平穩(wěn)性較高。轉(zhuǎn)速為25 r/min和30 r/min時加速度分別為0.35 m/s2和0.40 m/s2。而向上運動過程中,切刀轉(zhuǎn)速大于20 r/min在極限位置加速度均大于-1.00 m/s2,表明不同轉(zhuǎn)速下切刀均為穩(wěn)定緩慢切片而快速返回并準(zhǔn)備進入下一切片行程。加速度越大產(chǎn)生振動對切片影響越大,因此應(yīng)控制合理轉(zhuǎn)速范圍保證切片質(zhì)量。
表3數(shù)據(jù)顯示,進刀和退刀加速度峰值均隨轉(zhuǎn)速增大而增大,5~20 r/min進刀加速度變化幅度為0.04~0.06 m/s2,而25~30 r/min進刀加速度變化幅度為0.07~0.33 m/s2,表明轉(zhuǎn)速小于20 r/min進刀較平緩。同時,轉(zhuǎn)速為25 r/min時切刀進刀時間少于退刀時間,其余轉(zhuǎn)速時反之,原因在于該轉(zhuǎn)速切片在退刀和進刀之間加速度波動使得整機發(fā)生振動,從而出現(xiàn)圖13所示的切片死點,導(dǎo)致切刀還未到達切片進刀終點便進行退刀,因此,實際切片應(yīng)避免在25 r/min進行。
因此,綜合考慮切片質(zhì)量和效率,本文選取20 r/min為最優(yōu)轉(zhuǎn)速,此時切片周期由6 s縮短為1.5 s,效率提高75%。
4? 實驗及結(jié)果分析
4.1? 不同轉(zhuǎn)速實驗
為分析本文設(shè)計方案的可行性進行了樣機實驗。基于優(yōu)化后橢圓導(dǎo)軌長短徑的實驗平臺如圖15所示。
220 V交流電對直流電源和正點原子STM32F103單片機供電,橢圓導(dǎo)軌通過單片機控制JGB37-3650無刷直流電機進行驅(qū)動,維特智能產(chǎn)IMU慣性傳感器通過藍牙與計算機連接進行切刀加速度測量。6組實驗均測3次,共18組數(shù)據(jù),為提高數(shù)據(jù)信噪比,在MATLAB環(huán)境下對每組數(shù)據(jù)取平均后采用30點5次平滑算法對數(shù)據(jù)平滑處理,進一步構(gòu)建截止頻率為40 Hz的Butterworth 4階低通濾波器對數(shù)據(jù)降噪,得到不同轉(zhuǎn)速下切刀加速度實驗與仿真對比如圖16所示。
由圖16可知,不同轉(zhuǎn)速下切刀加速度均光滑連續(xù)周期性變化且與仿真變化規(guī)律相近,切刀進刀和退刀峰值加速度均隨轉(zhuǎn)速增大而增大。轉(zhuǎn)速為15 r/min和20 r/min下實驗與仿真加速度曲線更加貼合,且兩者不同時刻下退刀加速度峰值大小和時間均相近,切刀切入前后加速度波動小,表明此時切片機受摩擦和振動干擾較小,具有更好的穩(wěn)定性。為進一步分析不同轉(zhuǎn)速下整機性能,得到不同轉(zhuǎn)速實驗下切刀運動參數(shù)見表4。取實驗時間段內(nèi)切入位置仿真與實驗加速度相差最大為最大誤差,所有切入點仿真與實驗加速度誤差取平均為平均誤差,得到進刀和退刀加速度最大和平均誤差對比分別如圖17和圖18所示。
圖17和圖18均顯示不同轉(zhuǎn)速下實驗和仿真切刀加速度均存在誤差且均在10%內(nèi)。圖17表明切入位置加速度最大誤差和平均誤差均先在5~20 r/min區(qū)間遞減后于20~30 r/min區(qū)間遞增,在20 r/min處取得誤差極小值,此時最大誤差和平均誤差相較設(shè)計轉(zhuǎn)速5 r/min分別減小26%和49%。同時,圖18表明退刀加速度最大誤差在5~20 r/min區(qū)間遞減,后于20~30 r/min區(qū)間先增后減,在20 r/min處取得退刀加
速度誤差極小值,此時最大誤差和平均誤差相較設(shè)計轉(zhuǎn)速5 r/min分別減小60%和63%。因此,本設(shè)計在20 r/min下取得最優(yōu)性能,不同轉(zhuǎn)速下
實驗與仿真加速度相異原因為機械零件間滑動摩擦大小與轉(zhuǎn)速成反比,但隨轉(zhuǎn)速增大到一定值,整機振動加大對性能產(chǎn)生明顯影響。
經(jīng)仿真和實驗驗證,本設(shè)計在20 r/min下性能取得最優(yōu)。相較設(shè)計轉(zhuǎn)速5 r/min,20 r/min下加速度實驗仿真誤差均大大減小,原因在于速度增大到一定值后整機振動及受摩擦阻力均減小,實驗條件接近理想無摩擦與振動情況。同時,得到不同轉(zhuǎn)速下切刀實驗與仿真運動參數(shù),為后續(xù)性能優(yōu)化提供數(shù)據(jù)參考。
4.2? 樣機性能
采用10 mm厚度形狀均勻規(guī)則的玉米餅進行切片性能測試,刀片通過膠水粘在切片機刀片上并充分烘干粘牢。不同轉(zhuǎn)速下切片效果如圖19所示,不同轉(zhuǎn)速下玉米餅切口均光滑且無卡頓斷面現(xiàn)象,左右兩端厚度均勻,表明切片整齊度、美觀性和切片過程穩(wěn)定性均較好。因此,經(jīng)實驗驗證,本文設(shè)計具有可行性。
5? 結(jié)論
本文針對糕點切片效率和質(zhì)量低下問題,基于橢圓導(dǎo)軌剪叉機構(gòu)進行豎直往復(fù)式切片研究,通過對新型切片機構(gòu)型設(shè)計、運動學(xué)及靜力學(xué)分析,進一步進行不同轉(zhuǎn)速和長短徑比仿真對比分析,得到加速度均值和均方根值三次多項式擬合函數(shù)。在此基礎(chǔ)上,比對不同轉(zhuǎn)速仿真結(jié)果進行轉(zhuǎn)速擇優(yōu),并以擬合函數(shù)構(gòu)建目標(biāo)函數(shù),進而基于NSGA-Ⅱ遺傳算法對長徑及短徑進行優(yōu)化。對優(yōu)化長短徑后的樣機進行不同轉(zhuǎn)速實驗,驗證擇優(yōu)轉(zhuǎn)速的正確性,玉米餅切割實驗結(jié)果表明,不同轉(zhuǎn)速下切片機均具有可行性。主要結(jié)論如下:
(1)基于橢圓導(dǎo)軌剪叉機構(gòu)提出了一種將旋轉(zhuǎn)運動轉(zhuǎn)換為往復(fù)直線運動的新機構(gòu),進而設(shè)計了一種基于旋轉(zhuǎn)直線往復(fù)機構(gòu)的新型切片機。
(2)在橢圓導(dǎo)軌不同長短徑比和轉(zhuǎn)速動力學(xué)仿真基礎(chǔ)上,獲得最優(yōu)轉(zhuǎn)速為20 r/min。并基于NSGA-Ⅱ遺傳算法對長短徑參數(shù)進行優(yōu)化,得到最優(yōu)長短徑分別為190 mm、120 mm(長短徑比1.58)。優(yōu)化后切片機進刀功率由2 kW增至51.2 kW。
(3)基于橢圓導(dǎo)軌最優(yōu)長短徑比搭建糕點切片機樣機及實驗系統(tǒng),實驗與仿真結(jié)果規(guī)律相近,轉(zhuǎn)速擇優(yōu)后切刀進刀加速度最大誤差和平均誤差分別減小26%和49%,退刀加速度最大誤差和平均誤差分別減小60%和63%,表明優(yōu)化后切片機性能明顯提升。
(4)不同轉(zhuǎn)速下實驗與仿真對比結(jié)果表明,轉(zhuǎn)速優(yōu)化后切刀加速度在切入和未切入狀態(tài)均較優(yōu)化前波動小,驗證了轉(zhuǎn)速為20 r/min下具有更佳的切片性能,切片周期由6 s縮短至1.5 s,效率較優(yōu)化前提高了75%。
參考文獻:
[1]? HU X, HU L, ZHENG J. et al. Classification, Processing Procedures, and Market Demand of Chinese Biscuits and the Breeding of Special Wheat for Biscuit Making[J]. Journal of Food Quality, 2022,2022:6679776.
[2]? ANTONIOS K, LAURENCE S. ADISA A. Evaluating the Environmental Sustainability of Cakes[J]. Sustainable Production and Consumption, 2019, 19:169-180.
[3]? MALIK M, GAHLAWAT V, RAHUL S. Artificial Intelligence and Data Science in Food Processing Industry[M]∥EAI/Springer Innovations in Communication and Computing.Berlin: Springer ,2023, 231-244.
[4]? 江榮花,汪雯,蔡錚,等.肉制品加工過程中食源性致病菌交叉污染及風(fēng)險評估的研究進展[J].食品科學(xué),2018, 39(7):305-311.
JIANG Ronghua, WANG Wen, CAI Zheng, et al. Research Progress on Cross Contamination and Risk Assessment of Foodborne Pathogens in Meat Processing[J]. Food Science, 2018, 39(7):305-311.
[5]? THOMAS D J, RAINBOW J, BARTLEY L E. The Rapid-tome, a 3D-printed Microtome, and an Updated Hand-sectioning Method for High-quality Plant Sectioning[J]. Plant Methods, 2023,19:12.
[6]? NAYAK P K, RAYAGURU K. Design,Development and Performance Evaluation of Elephant Apple Core Cutter[J]. Journal of Food Science and Technology, 2017,54(12):4060-4066.
[7]? WEN Fujun, ZHU Zhengbo. Design and Parameter Study of Banana Crown Mechanical Cutting Device[J]. PloS One, 2022,17(11):e0275365.
[8]? STEFAN S, YVONNE S, HARALD R. High-speed Cutting of Foods:Cutting Behavior and Initial Cutting Forces[J]. Journal of Food Engineering,2018,230:55-62.
[9]? SINGHAL S, MANGAL D, KUMAR R. Smart Vegetable Cutter for Smart Home[C]∥1st International Conference in Advanced Innovation on Smart City. Jeddah, 2023:22888606.
[10]? LEBED N, ANTONOVA N, RUSAKOVA G. Investigation of Process of Cutting Fruit and Vegetable Raw Materials into Slices Using Rotary Chopper[J]. Proceedings of the 5th International Conference on Industrial Engineering, Lecture Notes in Mechanical Engineering. Berlin:Springer, 2020:451-459.
[11]? JIANG X. Development and Trend of Cutting Technology[J]. Non-Ferrous Mining and Metallurgy, 2016,32, 42-44.
[12]? MEI Song, PEI Fengque, SONG Zhiyu, et al. Design and Testing of Accurate Dicing Control System for Fruits and Vegetables[J]. Actuators,2022,11(9):252.
[13]? THANGDEE D, THANGDEE S. The Development of Lemongrass Slicing Machine[C]∥IOP Conference Series:Earth and Environmental Science. Pattaya ,2019:301.
[14]? HUANG Yi, XU Junze, AN Yida. Intelligent Integrated Multifunctional Vegetable Cutter System[J]. Journal of Physics:Conference Series,2021,1865(3):032073.
[15]? LEI Junle, XIAO Jianzhong, LI Xuyong. Structural Design of Small Household Cutting Machine Based on Solidworks[C]∥ Proceedings of the 4th International Conference on Intelligent Information Processing. Guilin ,2019,1865:032072.
[16]? JULIAN C, ARIRIGUZO, CHUKWUMA H. Innovative Okro Slicing Machine Design and Manufacturing[J]. Procedia Manufacturing,2018,17:363-370.
[17]? GAO Guohua, JIN Sipeng. Optimal Design of Edible Areca Catechu Slicer Based on TRIZ[C]∥Proceedings of the 2nd International Conference on Mechatronics Engineering and Information Technology (ICMEIT 2017). Atlantis, 2017:577-580.
[18]? 柏宗春, 呂曉蘭, 夏禮如.蔬菜嫁接苗高速切割裝置設(shè)計[J]. 農(nóng)業(yè)工程學(xué)報,2019,35(17):35-42.
BAI Zongchun, LYU Xiaolan, XIA Liru. Design of High-speed Cutting Device for Vegetable Grafted Seedlings[J]. Agricultural Engineering, 2019,35(17):35-42.
[19]? QIU Y S, WU T H, LIU B H. Design and Simulation of Pastry Slicer Based on Solidworks and ADAMS[J]. Advanced Materials Research, 2011,1442:328-330.
[20]? ODIOR A. Development of a Bread Slicing Machine from Locally Sourced Materials[J]. Journal of Technology and Education in Nigeria, 2007,12(2) :109215707.
[21]? FAN Yi. Design of a Dual-rotor Engine Driving by the Elliptic Gear[C]∥IOP Conference Series:Materials Science and Engineering. 2019 2nd International Conference on Mechanical, Electrical and Material Application. Xian ,2019,740:012028.
[22]? DONGKYU L, KUKHA H, BYUNGKYU K. Design and Simulation for a One-degree-of-freedom-based Rectangular Path Generating Mechanism Using an Ellipse[J]. Journal of Mechanical Science and Technology,2017,31(6):2923-2932.
[23]? 暢博彥, 李文啟, 金國光, 等. 精確直線可展機構(gòu)及其動力學(xué)分析[J].中國機械工程, 2018, 29(11):1303-1309.
CHANG Boyan, LI Wenqi, JIN Guoguang, et al. ExactLinear Deployable Mechanism and Its Dynamic Analysis[J]. China Mechanical Engineering, 2018, 29(11):1303-1309.
[24]? 徐坤, 喬安偉, 丁希侖. 剪叉彎曲折展變胞機構(gòu)的設(shè)計與分析[J]. 機械工程學(xué)報, 2020,56(5):55-62.
XU Kun, QIAO Anwei, DING Xilun. Design and Analysis of Scissor Bending Folding Metamorphic Mechanism[J]. Journal of Mechanical Engineering, 2020,56(5):55-62.
[25]? ARUNKUMAR G, KARTHEESHWARAN R, SIVA J. Investigation on Design, Analysis and Topological Optimization of Hydraulic Scissor Lift[C]∥Journal of Physics:Conference Series, International Conference on Advances in Thermal Engineering and Applications. Tamil Nadu, 2021, 2054:012081.
(編輯? 王艷麗)
作者簡介:
胡福清,男,1998年生,碩士研究生。研究方向為機器人學(xué)、機構(gòu)學(xué)。E-mail:1550669691@qq.com。
孫江宏(通信作者),男,1971年生,教授。研究方向為機器人學(xué)、機構(gòu)學(xué)。發(fā)表論文80余篇。E-mail:278796059@qq.com。
