基于激光測距的橡膠樹樹干輪廓曲線自動化提取方法
2024-05-22 00:28:31黎土煜劉青鄭勇黃敞曹建華王玲玲
中國農機化學報 2024年2期
黎土煜 劉青 鄭勇 黃敞 曹建華 王玲玲
摘要:為獲取橡膠樹樹干輪廓曲線模型,解決割膠裝備難以精準貼合樹干輪廓導致作業精度差、仿形效果不理想的關鍵問題,提出一種橡膠樹樹干輪廓曲線自動化提取方法。研制橡膠樹樹干輪廓點云數據自動采集平臺,該平臺由電源模塊、控制模塊、驅動模塊、采集模塊、數據傳輸模塊以及數據記錄處理模塊組成,可實現樹干外輪廓曲線點云數據的自動采集、傳輸、記錄與處理。開展橡膠樹樹干輪廓曲線自動化提取試驗,基于統計學方差分析法,通過曲線面積對比分析樹干輪廓提取精度。結果表明,連續采集30組橡膠樹樹干輪廓點云數據,其輪廓特征有效識別度較高,輪廓特征點位置與實際位置基本符合;輪廓曲線重復提取變異系數為0.001 3;樹干輪廓曲線提取精度不受樹干位置和采集方向變化的影響,該技術方案具有較強可行性。
關鍵詞:橡膠樹;激光測距;點云數據;輪廓曲線;自動提取
中圖分類號:S794.1
文獻標識碼:A
文章編號:20955553 (2024) 02019406
收稿日期:2022年4月16日 ?修回日期:2022年6月27日
基金項目:中央級科研事業單位基本科研業務費專項(1630022022005);海南省自然科學基金項目(320QN349、323QN273)
第一作者:黎土煜,男,1992年生,海南樂東人,碩士,研究實習員;研究方向為農業機械化。Email: li_tuyu@163.com
通訊作者:鄭勇,男,1984年生,湖南祁陽人,碩士,副研究員;研究方向為機械裝備與自動化。Email: zhengyong07@163.com
Automatic extraction method of the outline curve of rubber tree
based on the laserranging technology
Li Tuyu1, Liu Qing2, Zheng Yong1, Huang Chang1, Cao Jianhua1, Wang Lingling1
(1. Rubber Research Institute, Chinese Academy of Tropical Agricultural Sciences, Haikou, 571101, China;
2. Zhanjiang Agricultural Reclamation Modern Agriculture Development Co., Ltd., Zhanjiang, 524200, China)
Abstract:
In order to acquire the contour curve representation of rubber tree trunks and address the significant industrial challenge stemming from inadequate operational precision and suboptimal shaping outcomes resulting from the challenges associated with accurately fitting tapping equipment to the trunk contour, a method to automatically extract rubber tree outline curve based on laserranging technology was proposed. The automatic data acquisition platform of rubber tree trunk contour point cloud is developed, which is composed of power module, control module, drive module, acquisition module, data transmission module, data recording module and processing module. The platform has the function of automatic collection, transmission, recording and processing of the outline curve point cloud data. The automatic extraction experiment of rubber tree outline curve was carried out, and the accuracy of rubber tree outline extraction was analyzed by comparing the outline curve area based on statistical variance analysis. The results showed that the position of contour feature points was basically consistent with the actual position with a high recognition when 30 groups of contour point cloud data were collected continuously, and the coefficient of variation of repeated extraction of contour curves was 0.001 3. The extraction accuracy of trunk contour curve is not affected by the change of trunk position and acquisition direction, which means that the technical scheme is very feasible.
Keywords:
rubber tree; laserraging; point cloud data; outline curve; automatic extraction
0 引言
天然橡膠是重要的國防戰略物資和工業原料,廣泛應用于國防、航空航天、醫療衛生等領域[12]。目前,天然橡膠主要通過切割橡膠樹樹皮獲取,割膠深度需控制在1.2~1.8 mm,作業過程精度要求較高[3]。橡膠樹樹干輪廓形態復雜[45],具有裂縫、凹凸點等特征,割膠裝備難以精準貼合樹干輪廓,極易導致割膠過深傷樹、割膠過淺減產,無法滿足割膠精度要求[68]。因此,如何獲取樹干輪廓形態曲線,是提升割膠裝備作業精度首要解決的關鍵問題。
橡膠樹樹干輪廓形態曲線提取關鍵在于點云數據采集和曲線擬合。點云數據采集主要有紅外激光測距和超聲探測技術,其中紅外激光測距技術廣泛用于植被輪廓和干形的提取。劉俊焱[9]利用激光測距技術建立了單木樹葉和樹干的三維模型,驗證了該技術在樹干輪廓提取方面的可行性;尤磊[1011]實現了原木楊樹、洋白蠟、大葉白蠟等原木干形的提取,但無法精準表達樹干表面特征;同理,孫智慧[12]建立了黃瓜和玉米葉片曲面模型,提出點云數據采集數量越多,模型精度越高;高士增[13]結合激光掃描技術,搭建了樹木形態的參數化提取系統,提取誤差僅為5%;Lin等[14]則利用地面激光掃描儀實現了森林植被形態分類,分類精度可達0.965 9。與激光測距技術不同,超聲探測技術主要用于小型植被形態與內部結構點云數據的采集。楊誠等[15]利用超聲探測設備,實現蓮藕生長及分布位置的有效檢測;基于超聲探測技術,呂丹桔[16]成功獲取了白玉蘭、芭蕉、向日葵等植被的莖稈形態、結構及含水率數據。相較而言,紅外激光測距技術更適用于橡膠樹樹干輪廓形態點云數據的采集。根據獲取的樹干輪廓形態點云數據,結合貝賽爾曲線(Bézier)[17]、B樣條曲線和非均勻B樣條曲線(NURBS)等方法[18],便可實現樹干輪廓形態曲線的擬合與提取。
由于針對橡膠樹割面區域樹干輪廓提取的理論與技術研究尚少,本文擬通過紅外激光測距技術,搭建點云數據自動化采集平臺,開展橡膠樹樹干輪廓曲線提取相關研究,可為割膠裝備的設計與應用提供理論與技術支撐,對割膠“最后一公里”問題的解決具有重要意義。
1 點云數據自動采集平臺設計
1.1 平臺整體結構
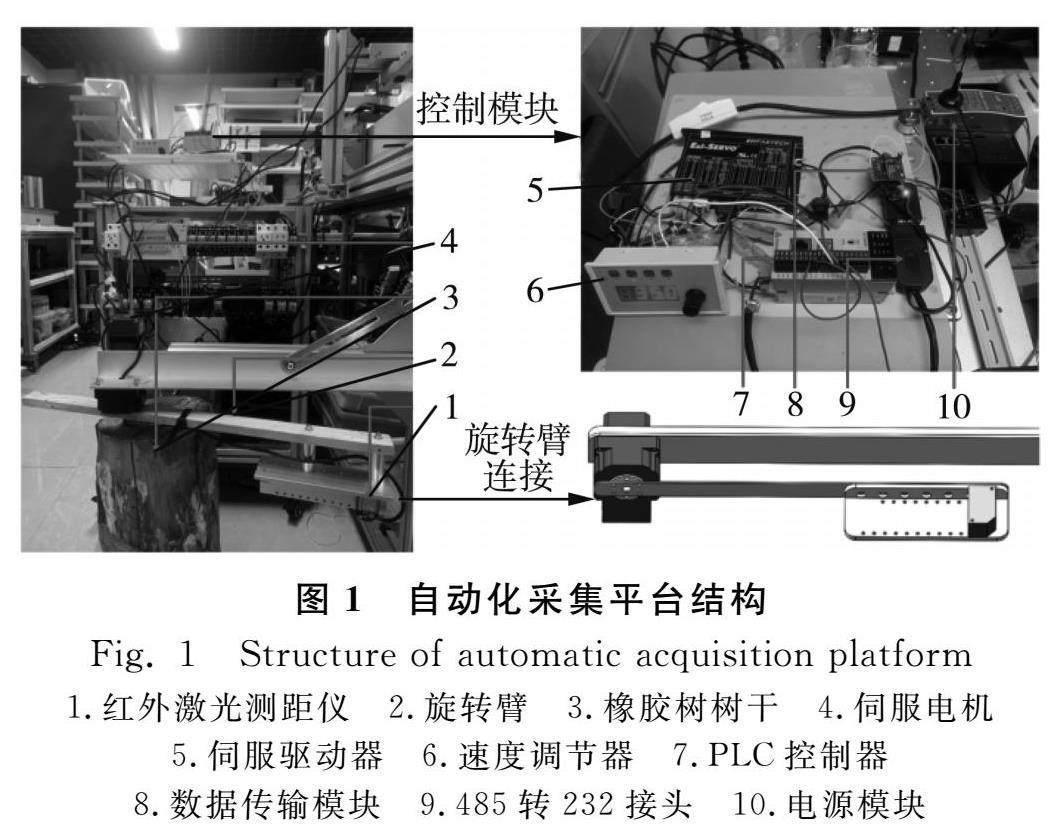
點云數據自動化采集平臺主要由電源模塊、控制模塊、驅動模塊、采集模塊、數據傳輸模塊以及數據記錄處理模塊組成,如圖1所示。其中,紅外激光測距儀通過角鋁轉接板與旋轉臂連接,轉接板上加工等距排孔,用于微調測距儀與橡膠樹樹干間距;旋轉臂通過螺栓與伺服電機軸連接;伺服電機通過螺栓與角鋁懸臂梁連接,并固定在穩固的支架上。
1.紅外激光測距儀 2.旋轉臂 3.橡膠樹樹干 4.伺服電機
5.伺服驅動器 6.速度調節器 7.PLC控制器
8.數據傳輸模塊 9.485轉232接頭 10.電源模塊
啟動前,通過速度調節器設置合適的伺服電機轉速,連接數據傳輸模塊與PC端,使橡膠樹樹干位于伺服電機下方、旋轉臂轉動范圍內;啟動后,伺服電機軸驅動旋轉臂轉動,帶動紅外激光測距儀環繞橡膠樹樹干做勻速圓周運動,從而采集樹干輪廓點云數據,點云數據經無線傳輸模塊發送至PC端進行記錄與處理。
1.2 平臺硬件結構
自動化采集平臺硬件結構如圖2所示。電源模塊采用MVI NDR-150-24開關電源,可為各元器件提供穩定的24 V直流電壓;控制模塊采用海為ACM120R系列PLC可編程控制器;驅動模塊由EzM-42XL系列伺服電機和伺服驅動器組成,其中,伺服電機為兩相驅動,輸出扭矩0.65 N·m;采集模塊采用松下HG-C1200紅外激光測距儀,測量精度0.07 mm,零點半徑r為200 mm,有效量程120~280 mm(物體與測距儀間距離);數據傳輸模塊采用藍牙傳輸裝置,波特率800 Bd;數據記錄采用鍵盤輸入程序,將數據轉化為鍵盤信號,實現數據自動化記錄。
1.3 平臺自動采集控制系統結構
自動化采集平臺自動控制系統主要用于控制采集模塊和數據傳輸模塊的啟停,避免橡膠樹樹干輪廓點云數據重復采集,提高點云數據采集精度,自動控制系統結構如圖3所示。該系統可實現以下控制:(1)控制伺服電機勻速轉動;(2)實時監測伺服電機轉動角度,伺服電機轉動360°后電機停轉,點云數據終止傳輸;(3)數據傳輸模塊將點云數據傳輸至PC端。
基于HaiwellHappy V2.2.9可視化編程環境,結合自動控制系統結構編制系統程序,從而實現電機自動啟停、電機勻角度轉動、點云數據傳輸頻率以及點云數據傳輸啟停等方面的精準控制。
1.4 采集間距設置
為適應不同直徑橡膠樹樹干輪廓點云數據的采集,需設定合適的采集間距(即旋轉臂長度),使橡膠樹樹干輪廓在紅外激光測距儀測量范圍內,如圖4所示。其中,r為測距儀零點半徑,r=200 mm;rmin為測距儀最小測量距離,rmin=120 mm;rmax為測距儀最大測量距離,rmax=280 mm。通常達到開割年齡的橡膠樹樹干半徑為R=100~150 mm,則采集間距l∈[r+Rmin,r+Rmax]=[300,350]。由于旋轉臂末端需預留調節板安裝空間,若調節板長度為a,則采集間距l∈[300+a,350+a],本文設定采集間距為325 mm。
2 橡膠樹樹干輪廓曲線提取原理
由于橡膠樹樹干輪廓形態復雜,無法通過規則圖形描述。本文將橡膠樹樹干任意截面處輪廓定義為有限個離散點擬合而成的不規則曲線,曲線上離散點即采集的點云數據。經坐標變換、無效數據過濾后,采用NURBS樣條曲線擬合方法提取橡膠樹樹干輪廓曲線[19]。
2.1 點云數據處理
根據前述點云數據采集方法,以旋轉臂轉動軸心為圓心O,通過環繞掃描樹干任一截面處輪廓,即可獲得樹干輪廓點云數據,如圖5所示。
1.激光測距儀 2.激光測距儀零點半徑
3.運動軌跡 4.橡膠樹
橡膠樹樹干輪廓上任意點Pi均有
Δd=R-ΔL=R-(r+ΔL)
(1)
式中:
Δd——輪廓點與圓心O距離,mm;
R——激光測距儀轉動半徑,mm;
ΔL——點云數據值,mm。
根據式(1),計算所得Δd即輪廓點與環形軌道圓心間距離,已知激光測距儀圍繞樹干轉動角速度、數據傳輸速度為恒定值,則輪廓點可定義為以旋轉臂轉動軸心O為原點、Δd為極徑、極角增量為Δθ,在極坐標系360°范圍內均勻分布的極點集合,如圖6所示,其中xO′y為極坐標系。
由于極坐標系內相鄰極點所對應的極角增量相等,則可將輪廓點極角等同于首項為0、末項為2π、公差為Δθ的等差數列,其中,極角增量Δθ與點云數據采集量相關,假設采集了n+1個點云數據Pi(i=0,1,…,n),則有
Δθ=2π/(n+1)
(2)
式中:
Δθ——極角增量,rad。
根據式(2),以極坐標形式表示輪廓點
Pi=(ρi,θi)=(Δdi,i·Δθ)
(3)
式中:
ρi——輪廓點極徑,mm;
θi——輪廓點極角,rad。
樹干輪廓曲線擬合需將點云數據轉換為直角坐標,則輪廓點Pi可表示為
Pi=(xi,yi)=Δdi·[sin(i·Δθ),cos(i·Δθ)]
(4)
2.2 樹干輪廓曲線提取
本文基于NURBS樣條曲線擬合方法,以樹干輪廓曲線點Pi作為樣條曲線擬合控制點,通過求解控制點節點向量,最終實現樹干輪廓曲線的擬合。其中,k次NURBS樣條曲線基函數[1920]為
Ni,0(u)=
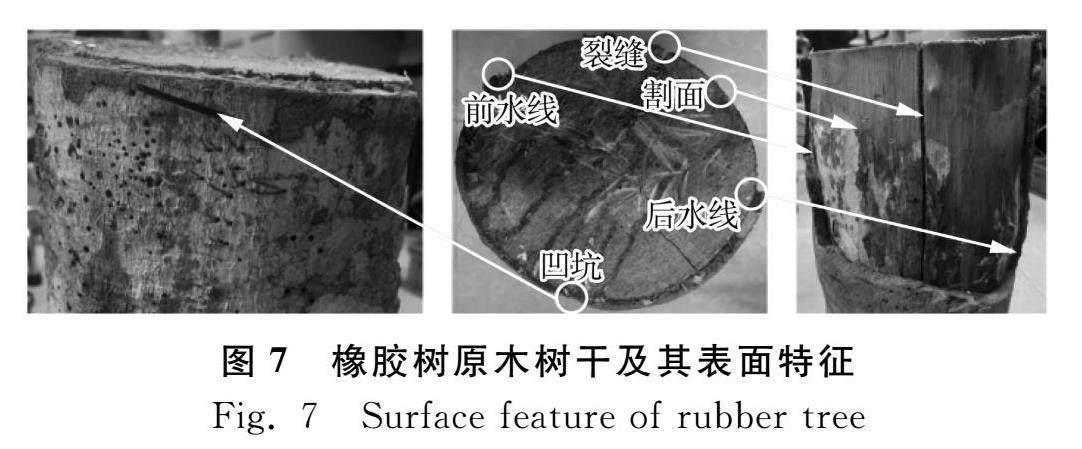
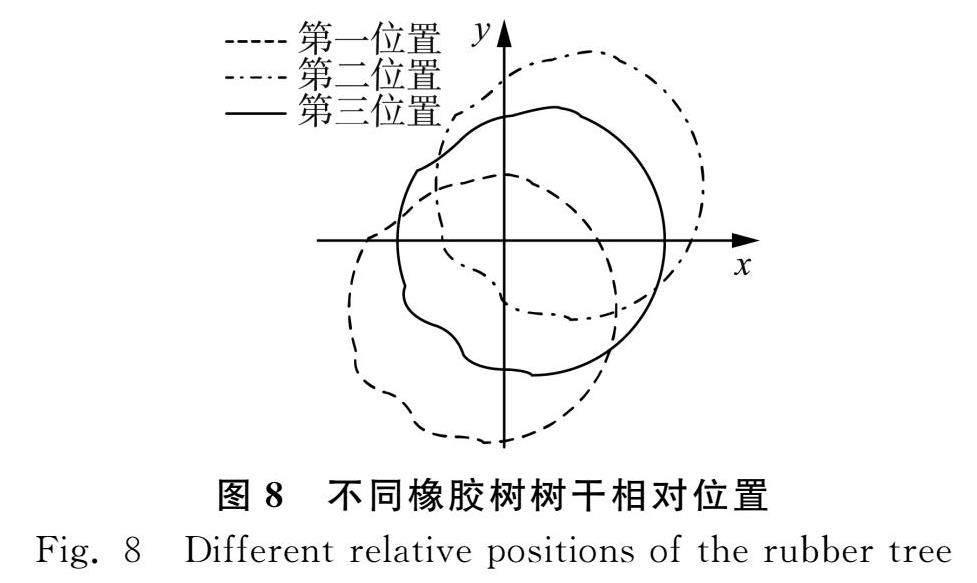
1,ui≤u 0,其他 Ni,k(u)u-uiui+k-uiNi,k-1(u)+ui+k+1-uui+k+1-ui+1Ni,k-1(u) 規定:00=0 (5) 式中: u——節點矢量值。 以第1個輪廓點P0作為樣條曲線的首末端點,剩余n個點作為輪廓曲線途經擬合點,則生成的樣條曲線有n+1個控制點Pi(i=0,1,…,n),n+k+1個節點矢量值ui(i=0,1,…,n+k+1)。根據哈特利—賈德方法[17],定義域[u0,un+k+1]內節點值為u0=u1=u2=u3=0;un+1=un+2=un+3=un+4=1,則有 ui-ui-1=∑i-1j=i-klj∑n+1i=k+1∑i-1j=i-klji=k+1, k+2,…,n+1 ui=∑ij=k+1(uj-uj-1)i=k+1,k+2,…,n lj=Pj-Pj-1j=1, 2,…,n (6) 式中: l——控制點弦長。 聯立式(5)和式(6),求解控制點集P={P0,P1,…,Pn}和節點矢量值u={u1,u2,…,un}。由于橡膠樹樹干輪廓為連續的閉合曲線,則輪廓曲線首末端點一致,即P0=Pn[2122]。至此,求解可得橡膠樹樹干輪廓曲線控制點、節點向量值。由于樹干輪廓點云數據量較多,本文采用AutoCAD軟件自帶的3階NURBS樣條曲線擬合功能提取樹干輪廓曲線。 3 橡膠樹樹干輪廓提取試驗 為驗證橡膠樹樹干輪廓曲線自動化提取技術可行性并評估其提取精度,本文基于研制的橡膠樹樹干輪廓自動化采集平臺,開展了橡膠樹樹干輪廓曲線自動化提取試驗。通過自動化重復采集樹干輪廓點云數據,數據經處理后導入AutoCAD實現樹干輪廓曲線的提取,以曲線面積重復度誤差、樹干輪廓特征識別率為評價指標,對提取的樹干輪廓曲線進行精度評估。 3.1 試驗材料 試驗材料為天然橡膠主栽品系熱研7-33-97原木樹干,樹干半徑R樹≈93 mm,樹干割面區域有清晰的前水線、后水線、割線、裂縫以及凹坑特征,如圖7所示。 3.2 樹干輪廓重復提取精度 針對橡膠樹樹干同一截面輪廓,分別使測距傳感器正向(旋轉臂順時針轉動)、反向(旋轉臂逆時針轉動)采集5組輪廓點云數據(共10組);分別使測距傳感器正向、反向采集3個不同的橡膠樹樹干相對位置(即樹干與旋轉臂軸心相對位置)輪廓點云數據,共計30組,樹干相對位置如圖8所示。根據獲取的樹干輪廓點云數據,通過AutoCAD擬合輪廓曲線并計算曲線面積。 基于統計學方差分析方法,通過橡膠樹樹干輪廓曲線面積,計算輪廓曲線面積均值μ,則有 μ=1N∑Ni=0Qi (7) 式中: N——樹干輪廓曲線采集數量; Qi——樹干輪廓曲線面積。 由式(7)可求得輪廓曲線面積標準差s,則有 s=1N∑Ni=0(Qi-μ) (8) 本文以樹干輪廓曲線面積變異系數表示樹干輪廓曲線精度。結合式(7)、式(8),輪廓曲線面積變異系數 σ=s/μ (9) 當變異系數≤0.05,即橡膠樹樹干輪廓提取精度無顯著差異,表明輪廓曲線重復精度較高;變異系數>0.05,表明輪廓曲線重復精度較低。 3.3 樹干輪廓特征點識別度 橡膠樹樹干輪廓特征包括割面、前水線、后水線、裂縫及凹坑。其中,割面即割膠作業結束后樹皮被割除的區域,割面通常作為下一輪割膠作業的基準之一;前水線即割膠作業起刀點基準;后水線即割膠作業收刀點基準,同時后水線可有助于膠乳引流;裂縫與凹坑即橡膠樹表面常見的不規則形狀區域。 本文將試驗所選橡膠樹樹干輪廓特征與輪廓曲線提取結果進行對比,分析輪廓特征的有效識別程度η,主要通過輪廓特征數量識別精度表達。 η=Dm×100% (10) 式中: D——輪廓特征識別數量; m——樹干輪廓特征數。 4 結果與分析 不同相對位置的橡膠樹樹干外輪廓正、反向提取結果如圖9所示,其中割面特征點表示為①;前水線特征點表示為②;后水線特征點表示為③;裂縫特征點表示為④;凹坑特征點表示為⑤。 (a) 正向采集 (b) 反向采集 由圖9可知,樹干輪廓特征點識別數量均為5個,試驗原木樹干特征點數量為5個,結果表明該樹干輪廓曲線自動化提取方法能有效識別樹干輪廓特征,輪廓特征的有效識別度較高,且輪廓特征點的位置與實際位置基本符合,提取結果驗證了本文方法的可行性;通過對比分析同一位置樹干輪廓的正向與反向提取結果可知,互為相反方向提取的樹干輪廓曲線,即為各自繞坐標原點旋轉180°后的水平鏡像曲線;部分樹干輪廓曲線會出現轉動偏移的現象,主要因為點云數據的采集、傳輸存在延時和誤差,但偏移現象并不會影響樹干輪廓曲線精度;提取的樹干輪廓表面裂縫特征④會呈現深度不一,甚至會出現裂縫特征曲線失真的現象,主要原因在于較深的裂縫會對紅外激光傳導產生干擾,導致點云數據采集誤差相對較大。 通過計算橡膠樹樹干輪廓曲線面積,并進行方差分析,結果如表1所示。 根據表1可知,橡膠樹樹干輪廓曲線重復提取精度無顯著偏差,變異系數為0.13%,結果表明該樹干輪廓曲線提取方法精度較高,且點云數據采集穩定性較強,重復提取精度可達到99.87%;當橡膠樹樹干位于點云數據采集范圍內,其輪廓曲線提取精度不受樹干采集裝置相對位置的影響,在提取樹干輪廓曲線時無需對樹干位置進行校準;與此同時,轉變點云數據采集方向并不會影響輪廓曲線提取精度。結果表明該樹干輪廓曲線提取方法相對便捷,并能有效避免校準樹干位置造成的誤差;第二位置標準差與變異系數相對于第一、第三位置較小,結合輪廓曲線提取結果,第二位置裂縫特征與圓心距離最小,即裂縫特征接近于激光測距儀零點半徑位置,據此初步判斷樹干外輪廓越接近激光測距儀零點半徑處,其測量精度越高。 5 結論 1) ?本文提出了一種橡膠樹樹干外輪廓曲線自動化提取方法,通過將樹干外輪廓點云數據轉換為直角坐標點,利用AutoCAD軟件3階NURBS樣條曲線擬合功能提取樹干外輪廓曲線。該方法經驗證具有較強可行性,其中,橡膠樹樹干輪廓特征點有效識別度較高;樹干輪廓曲線重復提取精度>99%。 2) ?研制了橡膠樹樹干輪廓點云數據自動采集平臺,包括電源模塊、控制模塊、驅動模塊、采集模塊、數據傳輸模塊以及數據記錄處理模塊,可實現橡膠樹樹干輪廓點云數據自動采集、傳輸、記錄及處理。 3) ?橡膠樹樹干輪廓曲線重復提取精度較高,不受樹干位置和采集方向變化的影響,即采集點云數據時無需校準樹干位置,提高了采集效率。然而,較深的裂縫會影響部分激光反射,造成測量數據存在一定誤差,此處仍需提高與優化。 4) ?本文實現了橡膠樹樹干輪廓曲線的自動提取,后續將開展輪廓曲線提取精度提升相關研究,并應用于割膠裝備,實現割膠軌跡的規劃,提升割膠裝備作業精度和仿形效果。 參 考 文 獻 [1]劉銳金, 莫業勇, 楊琳, 等. 我國天然橡膠產業戰略地位的再認識與發展建議[J]. 中國熱帶農業, 2022(1): 13-18. Liu Ruijin, Mo Yeyong, Yang Lin, et al. Rerecognition and advice on the strategic role of natural rubber industry in China [J]. China Tropical Agriculture, 2022(1): 13-18. [2]Soares F A, Steinbüchel A. Natural rubber degradation products: Fine chemicals and reuse of rubber waste [J]. European Polymer Journal, 2022, 165: 1-11. [3]NY/T 1088—2020, 橡膠樹割膠技術規程[S]. [4]Qi D, Yang C, Xie G, et al. Preliminary study on seedling growth rhythm and grey correlation analysis of rubber (Hevea brasiliensis) seedlings in Danzhou District, Hainan [J]. American Journal of Plant Sciences, 2014, 38(5): 66-72. [5]Yao X, Tu H, Wang X, et al. The effect of supplemental LED night lighting on the growth and physiology of the Para rubber tree [J]. Journal of Rubber Research, 2021(24): 312-316. [6]Silva T, Seneviratne P. Influence of some latex flow dynamics associated with different latex harvesting systems on latex yield of different clones of rubber (Hevea brasiliensis Muell. Arg.) [C]. International Symposium on Agriculture & Environment, 2021. [7]曾霞, 黃華孫. 我國天然橡膠技術發展現狀與展望[J]. 中國熱帶農業, 2021(1): 25-30. Zeng Xia, Huang Huasun.Development and prospects of natural rubber technology in China [J]. China Tropical Agriculture, 2021(1): 25-30. [8]Rukkhun R, Khongdee N, Iamsaard K, et al. Latex diagnosis at the whole trunk level under different tapping systems in youngtapping rubber trees [J]. Indian Journal of Agricultural Research, 2021(51): 59-66. [9]劉俊焱. 基于地面激光掃描點云數據的單木三維建模[D]. 南京: 南京林業大學, 2015. Liu Junyan. Single tree 3D modeling from terrestrial laser scanned point clouds [D]. Nanjing: Nanjing Forestry University, 2015. [10]尤磊. 基于點云數據的樹干干形測量[D]. 北京: 中國林業科學研究院, 2016. You Lei. Stem form measurement based on point cloud data [D]. Beijing: Chinese Academy of Forestry, 2016. [11]尤磊, 哈登龍, 謝明坤, 等. 基于三維激光點云與斷面輪廓曲線的樹干材積計算[J]. 林業科學, 2019, 55(11): 63-72. You Lei, Ha Denglong, Xie Mingkun, et al. Stem volume calculation based on stem section profile curve and three dimension laser point cloud [J]. Scientia Silvae Sinicae, 2019, 55(11): 63-72. [12]孫智慧. 基于點云數據的植物形態建模方法研究[D]. 北京: 首都師范大學, 2012. Sun Zhihui. Research on plant morphology modeling based on point cloud data [D]. Beijing: Capital Normal University, 2012. [13]高士增. 基于地面三維激光掃描的樹木枝干建模與參數提取技術[D]. 北京: 中國林業科學研究院, 2013. Gao Shizeng. Branches modeling and morphological parameters extraction technology based on 3D laser scanning technology [D]. Beijing: Chinese Academy of Forestry, 2013. [14]Lin W, Fan W, Liu H, et al. Classification of handheld laser scanning tree point cloud based on different KNN algorithms and random forest algorithm [J]. Forests, 2021, 12(3): 291-310. [15]楊誠, 王艾倫, 王計劃, 等. 基于ICEEMDAN的蓮藕超聲探測回波HHT時頻能量分析[J]. 機械工程師, 2021(10): 52-54, 59. Yang Cheng, Wang Ailun, Wang Jihua, et al. HilbertHuang transfer timefrequency energy analysis on ultrasonic signal of detecting lotus root based on ICEEMDAN [J]. Mechanical Engineer, 2021(10): 52-54, 59. [16]呂丹桔. 植物生長中莖體狀況的超聲射頻檢測與分析研究[D]. 昆明: 云南大學, 2018. Lü Danju. Detection and analysis of plant stem status in plant growth based on ultrasonic radio frequency [D]. Kunming: Yunnan University, 2018. [17]Wang G. Visual modeling for branch and trunk of trees based on twin bezier curve location [J]. Computer Applications & Software, 2008(11): 28-30. [18]魏棟, 張樹有, 劉曉健. 非均勻有理B樣條曲線的高精度低速度波動插補算法[J]. 浙江大學學報(工學版), 2016, 50(11): 2215-2223. Wei Dong, Zhang Shuyou, Liu Xiaojian. NURBS curve interpolation algorithm with high accuracy and minimal feedrate fluctuation [J]. Journal of Zhejiang University (Engineering Science), 2016, 50(11): 2215-2223. [19]施法中. 計算機輔助幾何設計與非均勻有理B樣條[M]. 高等教育出版社, 2001. [20]孫迪. 基于三維激光點云的雕塑Nurbs模型構建方法研究[J]. 福建地質, 2021, 40(1): 59-65. Sun Di. Construction of sculpture Nurbs model based on 3D laser point cloud [J]. Geology of Fujian, 2021, 40(1): 59-65. [21]李思, 高健. G1連續的封閉非均勻B樣條曲線迭代算法[J]. 機械設計與制造, 2014(2): 225-228. Li Si, Gao Jian. G1 continuous and closed nonuniform B-spline curve iteration algorithm [J]. Machinery Design & Manufacture, 2014(2): 225-228. [22]林鋒, 汪地. 三次非均勻B樣條曲線插補算法研究[J]. 組合機床與自動化加工技術, 2012(8): 32-35. Lin Feng, Wang Di. A study on interpolation technique of nonuniform B spline curve [J]. Modular Machine Tool & Automatic Manufacturing Technique, 2012(8): 32-35.