山區高速公路霧區行車安全預警系統設計
2024-05-27 12:23:58王曉安WANGXiaoan楊俊YANGJun徐民XUMin趙鵬燕ZHAOPengyan
價值工程 2024年14期
王曉安WANG Xiao-an;楊俊YANG Jun;徐民XU Min;趙鵬燕ZHAO Peng-yan
(云南省交通科學研究院有限公司,昆明 650011)
0 引言
隨著全球氣候環境惡化,山區高速公路團霧霧發頻次和路段數逐年遞增,加之機動車輛數激增,因團霧誘發的行車風險不斷加大,特別是近年來山區高速公路因團霧導致的交通事故呈高發態勢,但現有研究成果對于有效降低團霧段行車風險的效果不明顯,且存在諸如概念模糊不清、方法手段普適性差等問題[1][2]。因此,對山區高速公路霧區行車安全預警技術進行研究,將能有效提高山區高速公路霧區行車的安全水平和服務能力。
隨著移動互聯技術的發展和“工業4.0”理念的提出,霧區智能誘導系統亦需要向更高級的霧區交通信息物理系統發展,真正做到將氣候預測監測、多源異構信息收集傳輸處理、管控預判決策等多階段信息元和物理元融為一體[3][4]。國外現有研究主要從提示車的主動避碰探測入手,研究無人駕駛技術和車聯網技術,但本文認為單純從提高車輛的智能性出發并不能在短期內有效解決團霧環境行車安全,在團霧頻發的事故黑點段,通過對現有路段的附屬設施進行升級改造,可在短期內有效解決道路交通安全問題[5][6]。我國近年研發的霧區智能誘導警示系統設計理念較國外更先進,與我國國情結合更加緊密,但存在使用耐久性差,安裝維護成本高,缺乏國家和行業標準,理論研究有待深入等問題[7][8]。
本文首先對攝像法能見度檢查方法的原理進行介紹,然后對霧天限速值進行了定義,最后在此基礎上對山區高速公路團霧預警系統進行了設計。
1 山區高速公路團霧預警系統設計
1.1 系統布設位置、密度設計
團霧在空間尺度上的覆蓋范圍大小不一,一般來說較大范圍的團霧可覆蓋長約5 公里,較小的則低至1 公里。因此,山區高速公路團霧路段監測設備的布設密度對預警精度具有十分重要的影響。本系統為實現對團霧多發路段的全范圍實時監測,根據團霧發生范圍的特點,決定對團霧監測設備的布設密度是每一公里設置一套團霧信息采集單元,并在相應位置配備可變信息標志牌,其中,圖像采集設備安裝在高速公路中央分隔帶,如圖1 所示。下面假設一個場景,在這段高速公路上產生了局部團霧:
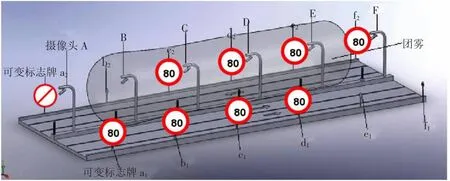
圖1 團霧預警系統布設示意圖
當C 處團霧監測裝置,監測到能見度為300m 團霧,根據團霧能見度大小,向雙向車道上游可變信息標志牌發送限速80 的限速信息,即b1處、d2處可變信息標志牌顯示限速80km/h。
與C 處相鄰的團霧監測裝置B、D 監測團霧信息,當B 處也檢測到團霧時,向al、c2發送限速信息;當D 處也檢測到團霧時,向c1、e2發送限速信息。
與以上同理E、F 處也進行團霧監測,當F 處沒有檢測到團霧時,即對其一側的道路(團霧路段的下游)f1處的可變信息牌發送解除限速信息。
同理,當A 處沒有檢測到團霧時,其路側可變標志牌a2顯示解除限速信息。
1.2 系統總體設計
系統采用模塊化設計,其主要模塊有:圖像采集模塊、圖像處理模塊、電源控制模塊、溫度檢測模塊、無線通信模塊、信息發布模塊。圖2 展示了其基本工作流程。
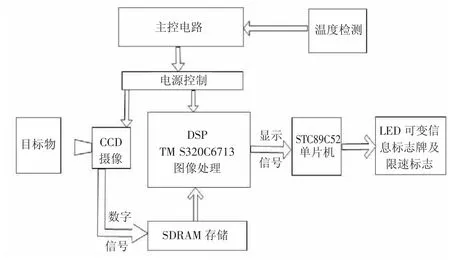
圖2 系統工作流程圖
1.3 系統芯片介紹及硬件設計
1.3.1 圖像采集模塊
本系統采用以ICX205AL 為核心的高速面陣型CCD攝像機,其被廣泛應用于高速攝像領域,是團霧檢查的不二選擇。ICX205AL 為一種對角線8mm 線間CCD 圖像傳感器,方形像素陣列和1.45M 有效像素,水平驅動頻率為14.318MHz,HAD 傳感器,具有高分辨率(總像素1434×1050)、靈敏度高、低暗電流、涂抹量低和抗暈性能好的特點。其采用漸進掃描信號在1/7.5 秒內獨立輸出,同時其也支持每秒30 幀的高幀速率輸出模式。該芯片采用可變電荷存儲時間的電子快門,無需機械快門即可實現對曝光時間的靈活控制,便于操作和使用。
本系統采用亞德諾公司生產的AD9225 模數轉換器進行信號采樣。其被廣泛應用于高速數據采集領域。AD9225 具有高速采樣率(采樣率65MSPS)和分辨率(分辨率為12 位),能夠滿足高精度數據采集需求。其功耗較低,僅為280mW,且采用5V 電源進行供電,供電方式多樣。同時,其尺寸較小,適用于便攜式和嵌入式系統。其抗干擾性能優越(信噪比為70dB),噪聲低,系統可靠性和精度高。其具有靈活的接口和控制,方便系統集成和調試。
CCD 攝像機通過采集距拍攝點一定距離的目標物或目標燈的圖像,再通過數字圖像采集卡輸入到計算機中。
1.3.2 圖像處理模塊
系統采用TI 公司TM S320C6713 DSP 為核心的嵌入式數字圖像處理芯片,其處理速度快,工作穩定,可滿足攝像機對處理速度的要求。它具有定點/浮點系列兼容,CPU主頻最高可達到1.1GHz,同時,還具有6 個ALU(32/40-bit)),2 個乘法器(16×16),最大執行速度可達每秒4.8×109條指令等優點,能夠很好地完成采集圖像的處理算法。
1.3.2.1 TMS320C6713 的CPU 結構
TMS320C6713 是美國德州儀器公司開發的一種32bit新型浮點DSP 芯片。該芯片的CPU 采用最新的VelociTI體系設計,主要包括;①程序取指令單元、指令分配單元、指令譯碼單元;②2 個數據通道A、B,每個通道中包括一個由16 個32bit 寄存器組成的寄存器組和4 個功能單元;③控制寄存器;④控制邏輯;⑤測試、在線仿真接口和中斷控制。
1.3.2.2 片內存儲器
芯片的片內存儲器采用兩級高速緩存結構,包括4KB 的第一級高速程序緩存(L1P)、4KB 第一級高速數據緩存(L1D)和第二級總共256KB片內存儲容量(64KB 的L2 統一緩存/映射RAM和192KB 的附加L2 RAM)。其采用雙層Cache結構,第一層為4KB 的程序緩沖區和可雙向尋址的數據緩沖區,第二層有256KB 的程序和數據緩沖區,其中64KB 為存儲區,剩下為SRAM區,這種獨特的二級緩存結構大大提高了CPU的工作效率。
1.3.2.3 片內集成外設
為了與主機、片外存儲器、串行設備等外部設備進行連接,該芯片內部集成了大量外設接口。EMIF 是外部存儲器和C6713 的訪問接口,幾乎可與目前各種類型的存儲器無縫連接,數據吞吐較快。2 個McASP;2 個McBSP;2 個32bit 的通用定時器,1 個16bit 的主機接口HPI;程序和數據存儲器控制器、中斷控制器、定時器、時鐘發生器、PLL(鎖相環控制發生器)及掉電邏輯等功能單元。
1.3.2.4 TMS320C6713 DSP 硬件最小系統設計
TMS320C6713 DSP 芯片的硬件最小系統所要完成的主要功能包括:進行基本信號采集、數據運算及數據、程序存儲;音頻信號的采集、處理及輸入、輸出;與主機間的通信及數據、程序傳輸,同時配備了外部擴展接口,方便對系統的功能擴展以實現更廣泛的嵌入式應用。其主要包括音頻處理模塊、數據處理模塊和電源轉換供電模塊設計。
1.3.3 無線通信模塊
ZigBee 技術具有低功耗、低成本、低數據速率、低復雜度和安全可靠等優點,很適合用于高速公路信息傳輸。采用Chipcon 公司的CC2430 芯片作為無線通信模塊,能夠很好地滿足高速公路雙向無線通信技術要求。CC2430 芯片除了包括2.4GHz RF 收發器外,還集成了加強型8051控制器。同時片上還具備FLASH 存儲器,能方便地存儲數據。其采用低電壓供電,靈敏度高達-91dBm,最大傳輸速率為250kbps。
1.3.4 信息發布模塊
當高速公路上發生團霧時,系統能否及時有效地傳遞出團霧信息,使高速公路的使用者和管理者都能盡快獲取信息,是至關重要的。該系統的信息發布主要由可變信息標志(vms),可變限速標志等組成。
可在高速公路路線上,設置門架式可變信息標志,用來發布該路段上能見度情況,原有的靜態限速標志,可由動態LED 可變限速標志代替。
LED 可變限速標志主要由以STC89C52 為核心的信息發布控制模塊和LED 電子顯示屏組成。
1.4 系統軟件設計
系統軟件是實現山區高速公路霧區行車安全預警的關鍵。系統軟件主要包括DSP 調試軟件CCS2.0 和STC89C52 單片機編譯軟件Keil C51。上述軟件的主要功能為提供預警系統運行的軟件環境,包括系統程序的編輯、編譯和調試環境等。
1.4.1 DSP 調試軟件CCS2.0
CCS 代碼調試器是一種合成開發環境的調試器。其主要的特性有:①使用TI 編譯器的完全集成的環境;②對C和DSP 匯編語言文件的目標管理;③高度集成的編譯器調整C 和DSP 匯編代碼;④編譯和調試時的后臺編輯。
1.4.2 STC89C52 單片機編譯軟件Keil C51
Keil C51 是一款基于Windows 的51 系列兼容單片機C 語言軟件的嵌入式編程集成開發系統,主要用于嵌入式系統的軟件開發、調試和測試。它支持多種不同的微控制器架構和芯片,并提供多種編譯器和調試器。Keil C51 已被完全集成到Keil μ Vision2 的集成開發環境中,包含編譯器、匯編器、實時操作系統、項目管理器和調試器等,便于使用者進行設計和調試。
在C51 中使用C 語言編制STC89C52 單片機芯片的程序。包括接收來自無線信息發射端的信號處理程序,根據圖像處理系統傳來的能見度信息,判斷是否控制LED可變限速標志顯示,如果需要限速,再根據能見度判斷該采用哪一級別的速度,控制LED 顯示屏發布限速信息。
1.5 系統調試
基于CCD 攝像的高速公路團霧預警系統涉及了CCD、DSP、STC89C52、LED 等器件,是比較復雜的系統,因此,影響系統正常運行的因素也是多樣的。因此,選擇合理的系統調試方案是完成系統調試,保證系統正常工作的前提。借鑒以往系統設計的經驗,首先保證硬件平臺的正確,其次進行軟件部分的調試,最后軟硬件聯調,有利于隔離問題,方便快捷地進行故障定位。
1.5.1 系統硬件調試
遵循硬件設計實現的流程,本著先功能模塊后整體模塊的原則,進行系統硬件調試。在設計制作各個功能模塊時,尤其是電路焊接時要用萬用表檢測電路板有無短路、斷路現象,把靜態調試放在硬件調試的首位。
根據本系統的工作原理,設計實現了一個利用煙霧傳感器檢測霧濃度,NRF905 無線傳輸煙霧濃度信息,STC89C52 單片機控制LED 限速標志實時改變限速速度的試驗系統(如圖3)。

圖3 試驗系統調試圖
1.5.2 軟件調試
各個功能單元的軟件編程和算法運行,在運用編譯軟件時都會在設計時逐步修正才能步步進行,關鍵是協調好各個功能單元之間的信息交流和共享。CCS 集成開發環境的調試工具有諸如:設置一個或多個斷點;Watch 窗口查看變量;查看和編輯寄存器、存儲器;對目標系統信號繪圖顯示;查看反匯編和C 指令等特點,可以幫助開發者對系統中的bug 進行實時診斷。同時,通過DSP/BIOS 插件,開發者還可以對DSP 應用程序進行實時跟蹤和監控。
1.5.3 軟硬件整體調試
在完成軟硬件的調試之后,要對系統的總體進行聯調,達到軟硬件的協調工作。
2 結語
本文通過團霧對高速公路行車安全影響的分析,根據能見度理論,在利用天氣氣象裝置、能見度檢測儀收集不同道路環境信息的基礎上,采用模塊化設計,建立了基于數字攝像的高速公路團霧路段行車安全預警系統信息平臺。該平臺能夠實時、高速、高效地向高速公路交通使用者發布團霧的發生及發展情況,通過LED 電子顯示屏顯示該團霧區的車輛行駛限速值,及時提醒過往駕駛員減速慢行,車速控制在限速值以下,可以有效地減少和預防高速公路由于突發團霧造成的交通事故,從而提高了高速公路的安全服務水平及運行效率。
猜你喜歡
電子制作(2018年12期)2018-08-01 00:47:44
制造技術與機床(2017年6期)2018-01-19 02:41:21
中華手工(2017年2期)2017-06-06 23:00:31
電子制作(2017年19期)2017-02-02 07:08:38
中國交通信息化(2016年9期)2016-06-06 07:42:10
當代化工研究(2016年6期)2016-03-20 16:21:46
中外會展(2014年4期)2014-11-27 07:46:46
小說月刊(2014年4期)2014-04-23 08:52:20
河南科技(2014年18期)2014-02-27 14:15:06
祝您健康(1987年3期)1987-12-30 09:52:32
