帶式輸送機不停機更換托輥機器人研究與應用
2024-06-06 11:02:43田立勇唐瑞于寧楊秀宇秦文光
中國機械工程 2024年5期
田立勇 唐瑞 于寧 楊秀宇 秦文光
摘要:
針對帶式輸送機托輥更換頻繁、人工更換工具笨重、作業勞動強度大、停機更換效率低等問題,以王家嶺煤礦主平硐帶式輸送機為研究對象,根據巷道參數和更換托輥流程,研究不停機更換托輥機器人,制定機器人總體研究方案。基于功能分析法與不停機更換托輥理論研究,利用SolidWorks軟件建立機器人三維實體模型,并對行走機構、姿態調整平臺、伸縮支撐平臺、拆裝機械手參數進行優化。通過ANSYS Workbench軟件對支撐平臺和皮帶舉升機構進行有限元分析,伸縮支撐平臺采用滑軌式結構,滑軌在懸臂和舉升額定載荷下應力分別為15.647 MPa和66.395 MPa,最大變形位移出現在額定載荷條件下,位移為1.0742 mm。皮帶舉升機構選用剪叉式結構,額定舉升時最大應力為152.82 MPa,最大位移為0.7331 mm。依據設計參數加工機器人樣機,以功率為64 kW的柴油發動機為動力,通過液壓馬達驅動履帶行走,速度范圍在3~8 km/h,姿態調整平臺可實現升降高度0~357 mm、俯仰角度±15°、側傾角度-4°~7°、旋轉角度-10°~20°、橫移范圍0~400 mm、縱移范圍0~350 mm,多級伸縮機構采用組合滑軌方式實現平臺0~2.1 m伸縮,采用五自由度機械手可實現對不同位置托輥進行拆裝。通過地面及井下試驗測試對機器人樣機的行走、姿態調整、舉升皮帶、拆裝托輥功能進行試驗驗證,結果表明:機器人在主平硐狹窄巷道行駛通過性良好,伸縮支撐平臺在輸送機不停機狀態下舉升皮帶最大高度為241 mm,為機械手拆裝不同位置托輥提供足夠操作空間以達到設計性能要求,研究帶式輸送機不停機更換托輥機器人可為煤礦帶式輸送機維修提供新途徑。
關鍵詞:帶式輸送機;維修機器人;更換托輥;不停機舉升皮帶
中圖分類號:TH112
DOI:10.3969/j.issn.1004132X.2024.05.019
開放科學(資源服務)標識碼(OSID):
Study and Application of Roller Replacement Robots with Non-stopping
for Belt Conveyors
TIAN Liyong1? TANG Rui1? YU Ning1? YANG Xiuyu1,2? QIN Wenguang3
1.School of Mechanical Engineering,Liaoning Technical University,Fuxin,Liaoning,123000
2.China Coal Tianjin Design Engineering Co.,Ltd.,Tianjin,300120
3.China Coal Huajin Group Co.,Ltd.,Hejin,Shanxi,043300
Abstract:In view of the problems of frequent replacement of belt conveyor rollers, heavy manual replacement tools, high labor intensity and low shutdown replacement efficiency, taking the belt conveyor in the main adit of Wangjialing Coal Mine as the research object, the roller replacement robots with non-stopping were studied according to roadway parameters and roller replacement processes, and the overall research plan of the robots was formulated. Based on the functional analysis method and the theory of roller replacement with non-stopping, the 3D solid model of the robots was established by using SolidWorks software, and the parameters of the walking mechanism, attitude adjustment platform, telescopic support platform and disassembling manipulator were optimized. The finite element analysis of the support platforms and belt lifting mechanisms was carried out by ANSYS Workbench software. The telescopic support platform adopted a sliding rail structure, and the stresses of the sliding rail under the cantilever and lifting rated load are as 15.647 MPa and 66.395 MPa respectively. The maximum deformation and displacement occur under the rated load. The displacement is as 1.0742 mm. Belt lifting mechanism adopted shear fork structure, the rated lifting maximum stress is as 152.82 MPa, the maximum displacement is as 0.7331 mm. According to the design parameters, the robot prototype was processed with the power of 64 kW diesel engine as the power, and the crawler was
收稿日期:20231228
基金項目:國家自然科學基金(52174143)
driven by the hydraulic motor. The speed range is as 3~8 km/h. The attitude adjustment platform may realize the lifting height 0~357 mm, the pitch angle ±15°, the roll angle -4°~7°, the rotation angle -10°~20°, the transverse movement range 0~400 mm, the longitudinal movement range 0~ 350 mm, the multi-stage telescopic mechanism adopted the combined slide to achieve the platform 0~2.1 m telescopic. Using a five-degree-of-freedom manipulator may disassemble and assemble rollers in different positions. Through the ground and underground tests, the robot prototype walking, attitude adjustment, lifting belt, disassemble roller functions were verified experimentally. The results show that the robots may pass well in the narrow tunnel of the main tunnel, and the maximum height of the lifting belt of the telescopic support platform is as 241 mm when the conveyor is not stopped, which provides enough operating space for the robots to disassemble and assemble the rollers under different positions to meet the design performance requirements. The study of roller replacement robots with non-stopping for belt conveyor provides a new way for the maintenance of coal mine belt conveyor.
Key words:belt conveyor; maintenance robot; roller replacement; non-stop lifted belt
0? 引言
帶式輸送機是煤礦輔助運輸主要設備,運輸環境惡劣、線路長、運輸量不均勻、運行時間長等原因導致托輥故障頻發,托輥故障主要包括托輥嚴重磨損、托輥軸承損壞和托輥卡阻等[1]。托輥磨損嚴重時會造成托輥與輸送帶摩擦產生異響且容易造成輸送帶跑偏,甚至刮蹭皮帶導致皮帶損壞造成安全事故[2],因此,為保障礦用帶式輸送機的連續運行和生產安全[3],及時處理輸送機托輥故障問題是至關重要的。
傳統帶式輸送機托輥更換方式為人工更換,人工更換方式效率低、實時性差、更換時間長導致生產效率下降,且維修人員勞動強度大、安全風險高。針對上述問題,美國俄亥俄動力公司的Cardinal發電廠提出一種快速、安全更換運煤輸送帶下槽型托輥組的方法[4]。我國學者對帶式輸送機托輥更換開展了相關研究,設計了一些輔助工具協助托輥更換。翟浩霆[5]提出了一種更換托輥專用工具,利用工具使膠帶脫離待更換托輥;沈鑫等[6]研制了一種皮帶機托輥更換工具,輔助更換上層和調心托輥;周靜等[7]研制了一種皮帶運輸機下托輥專用更換工具,能滿足下托輥更換需求;王冠宇等[8]研制了一種強力帶式輸送機更換托輥專用工具,采用小型液壓千斤頂輔助更換托輥;湯嶸[9]提出一種帶式輸送機托輥快速更換技術,設計了便攜式輔助托輥支架。
經過分析發現,現存托輥更換方式主要采用輔助工具支撐皮帶,然后人工拆卸安裝托輥。支撐方式包括:液壓千斤頂支撐、電動葫蘆絲配合鏈條托舉、自制輔助工具等。傳統人工更換方式需要帶式輸送機停機后清理完皮帶上方物料,再舉升皮帶使其與待更換托輥分離,最后人工將托輥拆卸安裝。井下環境惡劣,作業空間有限,對維修人員而言勞動強度大、危險性高,更換時效性差,傳統更換托輥導致停機停產,嚴重制約了煤礦生產的連續性和高效性。針對上述問題,提出了一種不停機更換托輥機器人,以實現在帶式輸送機工作狀態下完成托輥更換,降低維修工人勞動強度,快速安全完成維修任務,減少輸送機在線故障,保障生產安全和高效。
1? 不停機更換托輥機器人功能分析
以王家嶺煤礦主平硐帶式輸送機為工程研究對象,運輸距離長達12.8 km,托輥損壞頻繁,每年更換托輥數量7000個左右[10]。根據帶式輸送機更換托輥研究現狀,為解決井下輸送機托輥更換問題,對不停機更換托輥機器人進行研究。
基于功能分析設計法的基本原理,將不停機更換托輥機器人作為系統整體,建立系統總功能和特定結構子功能或功能元之間關系,將總功能合理分解為多個子功能,得到相互獨立的子功能,并對各子功能進行分析求解,找出實現功能的解決方案,進行排列組合得出最優組合選擇,形成功能實現的最佳設計方案[11]。
1.1? 更換托輥機器人總功能定義
王家嶺礦主平硐帶式輸送機運輸距離長、運輸量大,輸送機上部槽型托輥可能在任何時間、位置發生故障,需及時處理托輥故障。不停機更換托輥機器人以托輥損壞位置為信號,機器人通過能量傳遞和控制信號輸入,在巷道內行駛至托輥位置,根據現場情況調整平臺姿態,在輸送機不停機狀態下舉升皮帶并對托輥進行拆卸與安裝,實現安全快速更換托輥,保證故障快速應對處理,保障更換托輥安全和高效。借助黑箱法設計思維,確定不停機更換托輥機器人總功能為在帶式輸送機不停機狀態下更換托輥,其黑箱模型如圖1所示。
1.2? 不停機更換托輥機器人功能分解
不停機更換托輥機器人是一系列復雜機械系統組合,其總功能的定義較為抽象模糊,需將其與功能需求和作業環境空間狹小、距離長、坡度及輸送機高度等復雜因素結合,考慮機械零部件設計方法和制造加工現狀,基于更換托輥機器人總功能的基本設計原理,對總功能進行系統分解,并對各子功能進行求解,以達到總功能需求。
將不停機更換托輥機器人總功能分解為以下主要子功能,即行走、姿態調整、支撐、拆裝托輥、控制等功能,對以上子功能再次進行分解,形成圖2所示的不停機更換托輥機器人功能樹。
1.3? 功能單元求解
任何設備產品都是某種科學原理及其技術效
應與功能載體相結合的產物,其功能原理是以此為基礎實現各功能元物理作用[12]。同一功能元可能存在多樣解,需考慮實際加工條件及環境因素并根據其功能需求對各功能元進行求解[13]。利用功能分析法中形態學矩陣對子功能求解,對圖2所示的子功能進行分析,形成圖3所示的不停機更換托輥機器人子功能解決方案,得出功能元組合方案N=2×3×2×2×2×2×2×2×2×2=1536。
根據對不停機更換托輥機器人總功能分析和求解,結合巷道工作環境特點,機器人在工作過程中會存在上下坡、彎道和巷道變窄等地形特點以及帶式輸送機機架高度變化等因素。前期在王家嶺礦主平硐進行實地調研,對生產制造及配件采購進行考察,通過對比分析可知:履帶式底盤驅動力大、穩定性能好、爬坡能力強、轉彎半徑小、靈活性好、地形適應能力強,但存在運行速度低、功率消耗大等不足;輪式底盤速度快、噪聲低,但存在爬坡能力差、轉彎效率低、越障能力和地形適應能力差等不足[14]。考慮到井下作業壞境,需具備長時間工作能力和充足動力源,根據防爆要求,井下作業基本是柴油動力,若采用電驅動則需要配備電纜,井下遠距離作業拖拽電纜不方便,因此采用柴油動力模式,配合液壓泵站作為動力來源;由于井下電氣設備需要防爆處理以及井下環境因素對機器人整機尺寸要求嚴格,故將功能實現為主、節約空間為輔作為設計基礎,各功能驅動盡可能采用液壓驅動,驅動力大且運行穩定。為方便維修人員對更換托輥機器人進行控制,以手動式控制方式為主,操作方式采用遙控/機載按鈕,并配有點動功能以實現微小調整。以上述分析為基礎,設定不停機更換托輥機器人功能解決方案為A2+B1+C1+D2+E1+F2+G1+H2+I1+J2(圖3中方案組合)。
2? 不停機更換托輥機器人結構設計
2.1? 總體結構方案
根據上述功能分析法選定相對最佳解決方案,設計一種不停機更換托輥機器人,機械結構實際要求包括:結構對稱防止側翻;轉向靈活,爬坡穩定;密封性好,能夠在惡劣礦井巷道環境中防塵防水;輕量化和緊湊化設計。不停機更換托輥機器人主要包括行走驅動系統、姿態調整平臺、伸縮支撐平臺、托輥拆裝機械手等,對各部分進行系統設計,采用SolidWorks軟件對不停機更換托輥機器人進行三維實體建模,如圖4所示。當帶式輸送機出現托輥故障時,整機能攜帶新托輥快速到達故障位置處,在輸送機不停機狀態下完成托輥更換,減少設備在線故障,提高托輥更換效率。
2.2? 驅動系統設計
驅動系統主要包括行走機構、柴油發動機、液壓泵、液壓馬達、瓦斯檢測器、減速器、電源箱等。柴油發動機和液壓泵是提供驅動力的核心,采用防爆柴油發動機,對各執行機構功率需求進行計算,確定發動機最大轉矩和最高轉速,已知發動機功率,根據液壓泵選型要求,通過轉矩、功率匹配情況選定液壓泵型號(A11V)。
行走機構采用履帶式底盤,驅動力大、轉彎半徑小、適應性強,較輪式底盤更符合巷道行駛條件,主要包括張緊導向輪、履帶、驅動輪、橫梁、縱梁等[15]。液壓馬達依靠液壓泵傳來的液壓油旋轉,液壓馬達通過與其連接的減速機構得到低轉速、大扭矩。將液壓馬達、減速機構和驅動輪作為傳動整體,液壓馬達帶動驅動輪轉動,驅動輪輪齒和履帶鏈軌銷咬合帶動履帶運行,以實現整個機器人前進、后退等動作[16]。同時張緊導向輪起導向作用,與張緊油缸配合調節履帶松緊,上托板作用是支撐履帶。
根據空間限制要求,設定履帶帶寬200 mm,底盤尺寸(長×寬×高)為2000 mm×1000 mm×380 mm,如圖5所示。為提高牽引力與爬坡能力,選定型號LTM04液壓馬達,確定整車質量及質心位置進行穩定性校核,縱向35°翻傾臨界值0.70,實際值1.03(大于臨界值),35°爬坡不會翻傾;履帶接地長度1700 mm,履帶寬度200 mm,履帶結構附著系數0.75,接地比壓73.1 kPa,履帶附著力37 kN,大于總阻力18 kN。綜上,驅動系統各部件均滿足設計要求。
2.3? 姿態調整平臺設計
不停機更換托輥機器人姿態調整平臺結構如圖6所示。 姿態調整平臺主要包括升降俯仰平臺、旋轉平臺、橫移平臺、側傾平臺和縱移平臺五個機構,可實現在不同作業條件下進行多自由度姿態調整,確保機器人與輸送機合適的相對位置。
由于巷道地勢不平,帶式輸送機與地面高度各處不同,故機器人到達工作位置需要通過升降俯仰機構調整平臺俯仰角度及升降高度,使平臺與縱梁保持水平高度一致。如圖7所示,升降俯仰機構包括履帶底盤縱梁、升降俯仰油缸、折葉、升降平臺、銷軸等部件,折葉與底盤縱梁通過銷軸連接,液壓油缸缸筒與底盤橫梁鉸接,活塞桿與折葉用銷軸連接,
兩個折葉與升降平臺分別采用固定鉸接和滑動鉸接,通過控制油缸伸縮實現升降平臺高度調整與俯仰角度調整。
如圖8所示,平臺縱移機構調節平臺縱向位置,縱移油缸分別與升降平臺、縱移平臺通過銷軸鉸接,在液壓油缸驅動下實現縱向移動,滑軌由T形導軌和燕尾槽滑軌組成,可減少滑動過程中偏載和滑軌滑傷現象;旋轉平臺與縱移平臺間采用XRU21040X交叉滾子軸承連接,通過旋轉油缸驅動平臺實現順時針(逆時針)旋轉;側傾油缸帶動側傾平臺以固定在旋轉平臺上的鉸支座為支點轉動,調節平臺側傾角度,伸縮支撐平臺作業時重心發生變化,需通過側傾調節平臺姿態,以確保平臺伸縮過程的安全;橫移平臺通過油缸控制橫向調節平臺位置,靠緊帶式輸送機。姿態調整平臺通過各機構配合,可實現六自由度調節,使機器人適應井下復雜多變的工作環境。
2.4? 伸縮支撐平臺設計
不停機更換托輥機器人伸縮支撐平臺是整個機器人的關鍵部件,負責不停機舉升皮帶,如圖9所示,主要包括三級伸縮機構和皮帶舉升機構。由于皮帶下方空間狹窄,結構尺寸要求嚴格,故采用三級伸縮方式將平臺伸入輸送機內,從巷道行人側以懸臂形式伸出,平臺搭接在輸送機兩側縱梁上,形成穩定可靠的工作平臺。
考慮到多級液壓油缸尺寸過大,因此用三個液壓油缸獨立控制三級伸縮,便于位置調節和控制,避免多級油缸伸縮量過大造成力不平衡。平臺采用組合式滑軌,以方形滑軌和燕尾型滑軌組合,可提高滑動性能與承載能力,工作平臺底板與二級滑軌通過螺栓連接固定。
如圖10所示,皮帶舉升機構主要包括舉升油缸、主剪叉臂、副剪叉臂、托輥架、托輥、滑塊組件、底座等。該機構通過螺栓與平臺底板連接,采用剪叉結構為主體,依靠舉升油缸提供驅動力,帶動叉臂運動,實現托輥架升降。考慮到皮帶下方空間有限,側托輥架初始位置需與中間托輥架保持高度相近,將側托輥與主剪叉臂相結合,側托輥架與中間托輥架的夾角隨剪叉臂角度逐漸增大而變化,最終形成35°夾角的新托輥架組,且與輸送機原槽形托輥架組構型相近,避免舉升過程和輸送機運行過程中煤料從皮帶兩側掉落。
2.5? 托輥拆裝機械手設計
王家嶺礦主平硐帶式輸送機上部槽型托輥型號為1Dc1-bk10-634-22,規格為外徑159 mm、長度634 mm、軸徑30 mm,根據托輥結構特征,結合更換托輥機器人功能需求,如圖11所示,確定機械手由橫移機構、縱移機構、偏轉機構、升降機構、夾持機構組成。由于輸送機非行人側托輥距離較遠,
1.夾持油缸? 2.升降油缸? 3.偏轉油缸
4.橫移油缸? 5.縱移油缸
機械手橫向移動范圍需要足夠大,故采用液壓油缸、滑軌滑塊、鏈輪鏈條配合,通過鏈輪鏈條機構將油缸行程增加一倍,保證橫向移動行程;機械手縱向移動采用擺動油缸、齒輪齒條、滑軌滑塊配合,擺動油缸帶動齒輪與齒條嚙合,使機械手在縱向移動;采用夾爪式手爪,上手爪為圓形便于固定托輥。拆裝托輥機械手可對上部三個不同位置槽型托輥進行抓取拆裝作業。
3? 控制系統設計
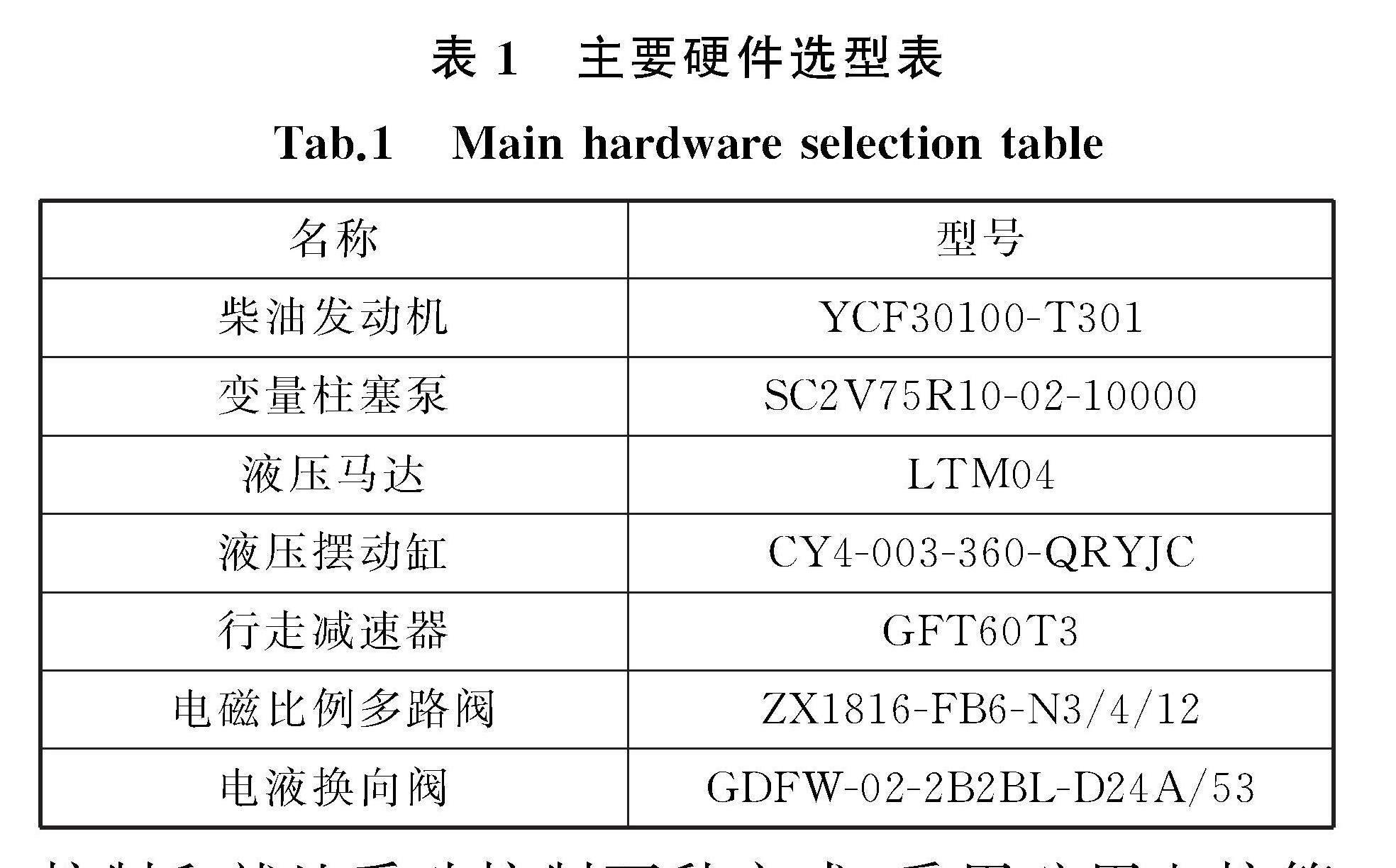
為提高托輥更換作業效率,減少托輥在線故障,維修人員可操作不停機更換托輥機器人在輸送機不停機狀態下及時、快速、安全地更換受損托輥,需配備精準可靠并且操作方便的控制系統。整機采用電液控制,柴油發動機與液壓泵配合為機器人提供動力源,液壓油通過各液壓元器件和液壓管路驅動各機構動作,其主要硬件選型如表1所示。
不停機更換托輥機器人控制方式主要為遙控
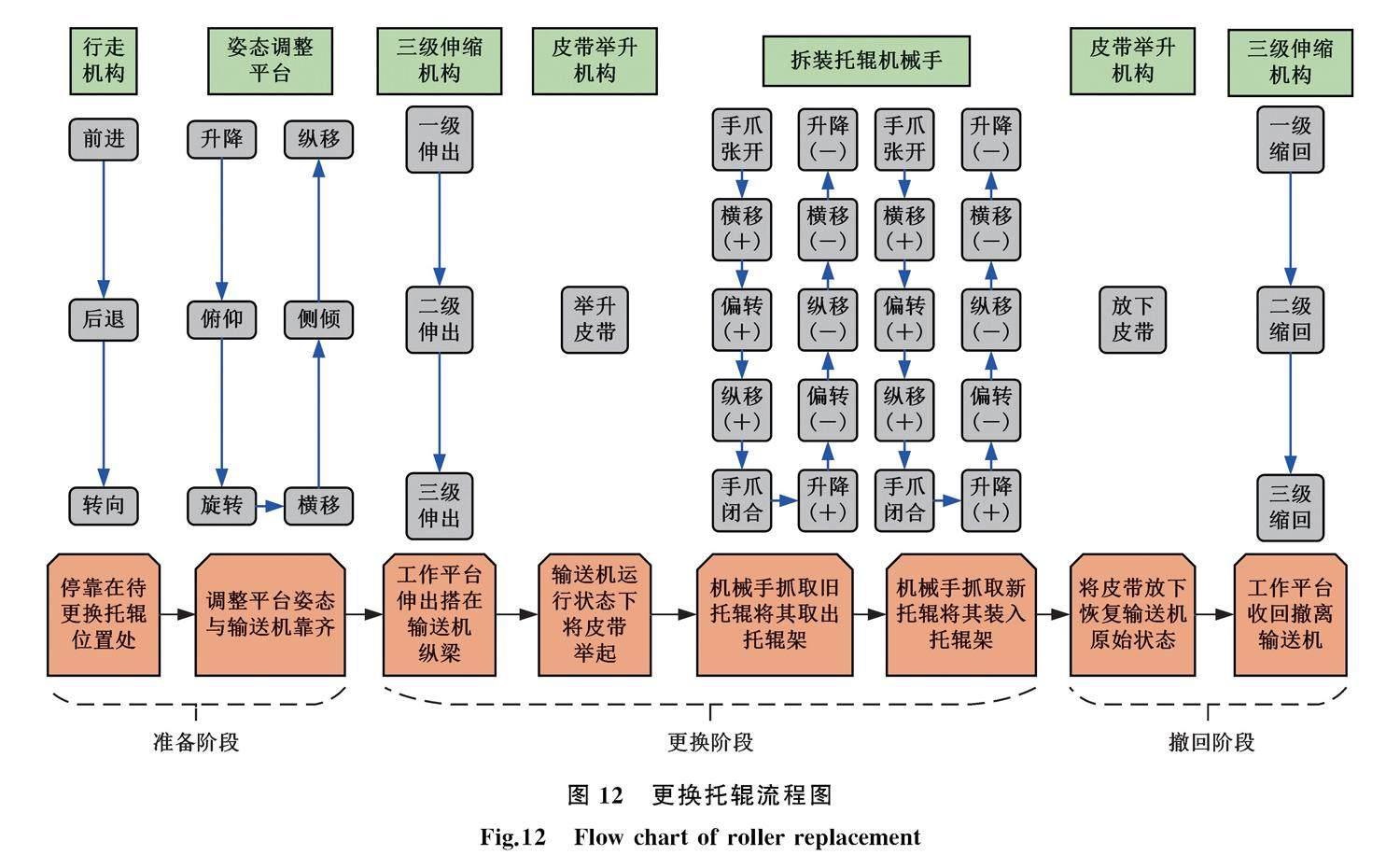
控制和就地手動控制兩種方式,采用礦用電控箱與遙控器無線連接,通過操作遙控器控制面板按鈕觸發開關指令,無線發射器對電控箱發送指令,當電控箱無線模塊接收到指令時,通過PLC控制系統接通繼電器控制電磁閥實現對液壓系統的控制;還可以就地操控電控箱按鈕進行控制。不同指令操作不同電磁閥,以實現對機器人各執行機構動作的控制,各動作靠液壓缸行程進行限位控制而無需傳感器,通過液壓系統壓力來判斷動作是否到位,圖12為機器人更換托輥流程圖。
4? 關鍵承載零部件有限元分析
4.1? 滑軌有限元分析及優化
4.1.1? 滑軌有限元分析
根據有限元簡化原則,利用SolidWorks簡化滑軌三維模型,在SolidWorks中設置接口與ANSYS Workbench實現數據連接,采用自動劃分網格法進行網格劃分,網格大小設為10 mm,共劃分20 656個節點,11 046個單元[17]。滑軌材料為42CrMo,彈性模量為206 GPa,泊松比為0.29。
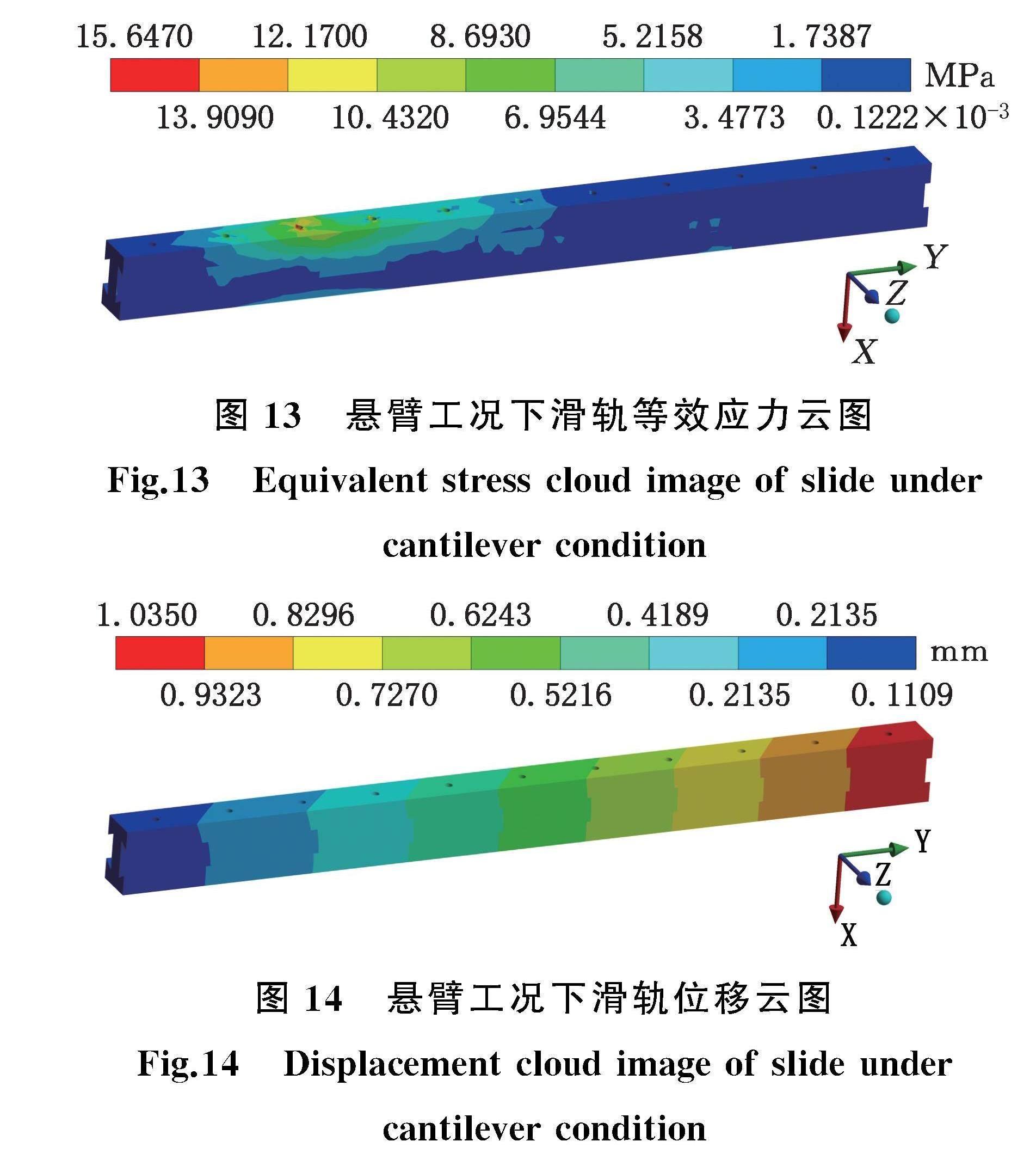
根據滑軌工作特性,將滑軌作用力按約束條件處理,以懸臂和額定載荷支撐兩種工況對滑軌進行分析,得到滑軌在兩種工況條件下的等效應力云圖和位移云圖。
平臺伸縮過程懸臂工況下滑軌有限元分析結果如圖13、圖14所示。由圖13等效應力云圖可以看出應力集中區主要分布在左側上方,最大應力值為15.647 MPa。由圖14位移云圖得出最大位移在右側端部,最大位移量為1.035 mm。
平臺額定載荷支撐工況下滑軌有限元分析結果如圖15、圖16所示。由圖15等效應力云圖可以看到應力集中區在中部偏左,最大應力值為66.395 MPa。由圖16位移云圖得出最大位移在右側端部,最大位移量為1.0742 mm。
對兩種不同工況下滑軌應力應變結果分析可知,在重載情況下滑軌受載情況明顯,應力相對較大,因此以額定載荷工況下滑軌的力學特性為主要研究對象對滑軌結構參數進行優化。
4.1.2? 滑軌結構參數優化分析
根據滑軌分析結果,以滑軌高度D1、滑軌寬度D2、中間筋板厚度D3、燕尾槽厚度D4為優化參數,以質量、應力及最大位移量為優化目標。采用ANSYS Workbench軟件中Design Explorer優化設計模塊(GDO)對滑軌進行優化求解,可完成對多目標同時優化,并得出最優解[18]。輸入參數區間數值,優化時系統會自行在參數約束范圍內選取目標點,通過計算可得到大量目標點數值結果。
根據對目標點的分析,D1、D2、D3、D4參數對質量、應力及最大變形量的影響較大,目標參數對質量、應力和位移的響應面分析如下。
從圖17中可以看出,4個變量對滑軌的最大應力影響規律復雜,且不為簡單的線性關系,滑軌的最大應力隨著滑軌高度D1、滑軌寬度D2、燕尾槽厚度D4的增大而減小,而中間筋板厚度D3對其影響不是很大。
通過圖18可看出,隨著滑軌高度D1、滑軌寬度D2、中間筋板厚度D3、燕尾槽厚度D4的增大,滑軌變形越來越小,符合變形規律。當滑軌厚度增大時,強度增大,同時也提高了自身抵抗變形的能力,但是厚度不能無限增大,否則將導致滑軌的質量過大,因此在滿足滑軌變形要求的前提下,應盡量減小其厚度,以減小滑軌的質量,如圖19所示。
通過對各結構參數與應力、位移、質量的響應面分析,最終確定優化后參數值如表2所示。
優化前后的結果對比如表3所示,經分析對比可得滑軌主要應力集中區的最大等效應力值增大,但小于材料42CrMo的許用應力,位移變化較小,通過優化后滑軌質量由29.241 kg減小到18.268 kg,減小了10.973 kg,實現了滑軌輕量化設計。根據此類方法可對其他部件進行結構參數優化[19]。
4.2? 剪叉臂有限元分析
根據有限元分析方法對皮帶舉升機構剪叉臂進行仿真分析,剪叉臂在工作時主要受銷軸約束,因此對剪叉臂銷軸孔進行載荷施加,載荷以自由度(degree of freedom,DOF)約束和面載荷形式設置,對其平動方向進行約束,轉動方向為自由,銷軸接觸表面受到壓力[20]。邊界條件設置完成,采用直接求解法得到剪叉等效應力與位移云圖,見圖22、圖23。
由圖22、圖23可知,最大位移為0.7331 mm,位于叉臂頂端位置;應力較大位置在彎臂處,應力值最大為152.82 MPa,剪叉臂強度滿足要求。
5? 樣機試驗研究
基于理論設計與優化分析結果制作了帶式輸送機不停機更換托輥機器人樣機,如圖24所示,分別進行了地面性能測試和井下應用測試。并對該機器人各功能進行性能試驗測試。
5.1? 地面試驗
地面試驗在中煤華晉集團王家嶺煤礦進行,在地面搭建帶式輸送機機架,開展更換托輥測試。圖25為不停機更換托輥機器人地面試驗現場圖,機器人樣機測試前進后退及轉向等功能,能根據作業需求對行駛速度和轉向進行準確控制;姿態調整平臺各機構調整參數與設計要求相符,可將不同狀態下的平臺調整到最佳工作姿態;伸縮支撐平臺可在皮帶最低水平高度下完成平臺伸縮,一級和三級伸縮機構搭在輸送機縱梁上,皮帶舉升機構升降高度和托輥舉升姿態與設計相符, 但皮帶舉升后實際情況需進行井下現場試驗;機械手可對不同位置的托輥進行拆卸并完成安裝。地面試驗結果表明機器人各部分功能可達到預期設計要求。
5.2? 井下試驗
通過地面試驗對不停機更換托輥機器人各功能完成初步測試,為進一步驗證機器人實際應用情況,在王家嶺礦主平硐巷道進行應用性試驗。
5.2.1? 行走試驗
更換托輥機器人井下行走試驗在王家嶺礦主平硐巷道進行,選取1號聯絡巷、2號聯絡巷、4號聯絡巷位置前后1 km作為試驗路段,圖26為井下行走試驗現場圖。經過多路段多次試驗,機器人在巷道內最高行駛速度可達到3 ~8 km/h,由于巷道寬度不同,個別位置需低速慢行通過,爬坡角度滿足20°左右,在泥濘、沙礫等路段行駛通暢,能適應不同路段地面環境,可在各聯絡巷完成轉向,機器人行走與續航功能滿足設計要求。
5.2.2? 姿態調整試驗
如圖27所示,機器人姿態調整平臺試驗在主平硐巷道行人側進行,在輸送機不同位置和機器人不同停靠角度進行姿態調整測試,分別多次進行隨機和特定的位置與停靠角度測試。巷道內輸送機縱梁頂部距離地面高度在0.82~0.99 m,姿態調整平臺可在巷道內調整機器人各種姿態,修正平臺與輸送機之間相對位置,升降高度范圍(平臺頂部與地面距離)在706~1063 mm,俯仰角度最大為15°,側傾角度為-4°~7°,旋轉角度范圍為-10°~20°,縱移與橫移距離分別為350 mm和400 mm。
5.2.3? 伸縮支撐試驗
圖28為伸縮支撐試驗現場圖,考慮到在輸送機內部進行測試,首先在輸送機停機狀態下進行試驗,以保證操作流程和機器人運行的安全性和流暢性,然后分別進行輸送帶在速度1.5~3.5 m/s和空載、帶載運行狀態下的舉升皮帶測試,試驗過程中舉升皮帶平穩,物料無劇烈抖動和灑落情況,皮帶舉升后輸送機運行正常。
伸縮支撐試驗分別在1號~5號聯絡巷附近進行試驗,并測得舉升皮帶高度如圖29所示,其中0點為舉升位置,橫軸各點為托輥架位置,縱軸表示輸送帶與托輥分離后的距離,可以得到皮帶舉升最大高度為241 mm。
5.2.4? 拆裝托輥試驗
如圖30所示,機械手拆裝托輥試驗分別進行了拆裝托輥集中試驗和整機聯合試驗,在主平硐1號~5號聯絡巷附近隨機選取托輥架位置進行試驗,與聯合試驗相比,集中試驗的拆裝托輥速度較快,通過試驗對比得到拆裝行人側托輥、中間托輥、非行人側托輥所需時間分別為4~5 min、3~4 min、5~6 min,根據現場環境和操作差異,機械手拆裝托輥時間有波動。
不停機更換托輥機器人在王家嶺礦完成了地面試驗和井下試驗,現場應用情況表明機器人可在主平硐巷道遠距離行駛,在帶式輸送機不停機狀態下對上部槽型托輥完成更換,總體效果較好,符合煤礦應用需求,減少了作業人員數量,減輕了檢修人員勞動強度,提高了檢修效率和安全性,保證了煤礦生產連續性。不停機更換托輥機器人主要性能及參數如表4所示。
6? 結論
針對傳統更換帶式輸送機托輥存在維修人員多、勞動強度大、更換效率低、影響生產等問題,提出了不停機更換托輥技術,基于功能分析方法與托輥更換理論研究制作了不停機更換托輥機器人樣機,并進行現場試驗。所得結論如下:
(1)研究了履帶式底盤,可在巷道內不同硬度路面上行走,以柴油發動機為動力可實現在狹窄巷道遠距離行駛,行駛速度范圍為0~8 km/h,最大爬坡角度為20°。
(2)研究了六自由度姿態調整平臺,實現機器人在更換托輥時,根據機器人與帶式輸送機位置關系調節更換平臺姿態,保證了機器人正常進行托輥更換作業。
(3)研究了組合式滑軌伸縮機構和剪叉式舉升機構,實現輸送機不停機狀態下舉升皮帶最大高度241 mm,舉升處相鄰托輥組高度滿足更換托輥空間要求,輸送帶舉升過程平穩,舉升后平臺支撐穩定,物料無劇烈抖動和灑落現象,輸送機運行正常。
(4)研究了五自由度更換托輥機械手,實現了機械手在更換托輥過程中能夠可靠地抓取、拆卸、安裝,達到了設計要求。
不停機更換托輥機器人的研究克服了狹窄空間遠距離行走復雜作業、平臺姿態調整、不停機舉升皮帶等技術難題,但該機器人還處于人工輔助控制,智能化水平不高,可通過后續研究提高帶式輸送機更換托輥的自動化和智能化水平。
不停機更換托輥機器人的成功應用填補了在煤礦輔助運輸維修機器人的空白,結束了我國煤礦輔助運輸沒有維修機器人的歷史,為煤礦帶式輸送機維修提供了新方法。
參考文獻:
[1]? 方崇全.煤礦帶式輸送機巡檢機器人關鍵技術研究[J].煤炭科學技術,2022,50(5):263-270.
FANG Chongquan. Research on the Key Technology of Inspection Robot of Coal Mine Belt Conveyor[J]. Coal Science and Technology, 2022,50(5):263-270.
[2]? 朱振. 帶式輸送機托輥運行狀態在線巡檢機器人關鍵技術研究[D].阜新:遼寧工程技術大學,2020.
ZHU Zhen. Research on the Key Technology of? the On-line Inspection Robot for the Running State of the Belt Conveyor Roller[D]. Fuxin:Liaoning Engineering and Technical University, 2020.
[3]? 崔融融.帶式輸送機故障自動巡檢機器人系統設計[J].煤礦機械,2021,42(3):15-18.
CUI Rongrong. Design of Automatic Inspection Robot System for Belt Conveyor Fault[J]. Coal Mine Machinery, 2021,42(3):15-18.
[4]? 范正田 .更換托輥用的膠帶舉升裝置[J].起重運輸機械,1986(9):61.
FAN Zhengtian. Replace the Tape lifting Device for the Roller[J]. Lifting and Transportation Machinery, 1986(9):61.
[5]? 翟浩霆.帶式輸送機更換托輥專用工具[J].起重運輸機械,2003(7):51.
ZHAI Haoting. Special Tool for Belt Conveyor[J]. Lifting and Transportation Machinery, 2003(7):51.
[6]? 沈鑫,楊金艷.皮帶機托輥更換工具的研制及應用[J].黃金,2016,37(10):51-53.
SHEN Xin, YANG Jinyan. Development and Application of Replacement Tool for Belt Conveyor Roller[J]. Gold, 2016, 37(10):51-53.
[7]? 周靜,牛江峰.自制皮帶運輸機下托輥的專用更換工具[J].中國設備工程,2015(12):90-91.
ZHOU Jing, NIU Jiangfeng. Special Replacement Tool for the Lower Roller of the Self-made Belt Conveyor[J]. China Equipment Engineering, 2015(12):90-91.
[8]? 王冠宇,戚玉彬.強力帶式輸送機更換托輥專用工具的制作及應用[J].礦山機械,2009,37(8):95.
WANG Guanyu, QI Yubin. Production and Application of Special Tools for Replacing the Roller of the Powerful Belt Conveyor[J]. Mining Machinery, 2009,37(8):95.
[9]? 湯嶸.帶式輸送機托輥快速更換技術[J].起重運輸機械,2010(1):103-105.
TANG Rong. Rapid Replacement Technology of Belt Conveyor Roller[J]. Lifting and Transportation Machinery, 2010(1):103-105.
[10]? 楊福珍,白霄,楊清翔.長運距主平硐帶式輸送機設計與應用[J].煤炭科學技術,2016,44(10):146-149.
YANG Fuzhen, BAI Xiao, YANG Qingxiang. Design and Application of Belt Conveyor with Long Distance Main Adit[J]. Coal Science and Technology, 2016,44(10):146-149.
[11]? 康帥,張勇,王川川.基于功能分析法的應急搶險排水車設計[J].工程機械,2022,53(11):87-91.
KANG Shuai, ZHANG Yong, WANG Chuanchuan. Design of Emergency Rescue Drainage Vehicle Based on Functional Analysis Method[J]. Construction Machinery, 2022,53(11):87-91.
[12]? 李志春,包長江,李日輝,等.基于功能分析法的景區營地建造車設計研究[J].機械設計,2022,39(2):129-137.
LI Zhichun, BAO Changjiang, LI Rihui,et al. Research on the Design of? Scenic Spot Camp Construction Vehicles Based on Functional Analysis Method[J]. Mechanical Design, 2022,39(2):129-137.
[13]? 孟娜娜,鐘鵬程,雷超,等.基于功能分析的帶式輸送機自動巡檢機器人設計[J].煤炭科學技術,2022,50(8):227-235.
MENG Nana, ZHONG Pengcheng, LEI Chao,et al. Design of Automatic Inspection Robot of Belt Conveyor Based on Functional Analysis[J]. Coal Science and Technology, 2022,50(8):227-235.
[14]? 司癸卯,宋星亮,師毓,等.新型輪履式復合底盤結構設計與有限元分析[J].中國工程機械學報,2018,16(3):207-210.
SI Guimao, SONG Xingliang, SHI Yu,et al. Structural Design and Finite Element Analysis of the New Wheel-track Composite Chassis[J]. Chinese Journal of Engineering Machinery, 2018,16(3):207-210.
[15]? 李濤,韓小剛,蘇曉靜.井下懸臂式掘進機行走機構履帶架故障分析[J].機械工程師,2013(6):191-192.
LI Tao, HAN Xiaogang, SU Xiaojing. Fault Analysis of Crawler Frame of? Walking Mechanism of? Underground Cantilever Roadheader[J]. Mechanical Engineer, 2013(6):191-192.
[16]? 毛君,李申巖,王麗麗.EBZ-132SH型掘進機的行走機構及其液壓系統設計[J].煤礦機械,2007(9):140-141.
MAO Jun, LI Shenyan, WANG Lili. Design of? Walking Mechanism and Hydraulic System of EBZ-132SH Roadheader[J]. Coal Mine Machinery, 2007(9):140-141.
[17]? 田立勇,隋然,宋振鐸,等.基于有限元法的固體充填液壓支架底座結構參數優化[J].機械設計,2018,35(2):98-104.
TIAN Liyong, SUI Ran, SON Zhenduo,et al. Optimization of Structural Parameters of Solid Filling Hydraulic Support Base Based on Finite Element Method[J]. Mechanical Design, 2018,35(2):98-104.
[18]? 于寧,田立勇,孫聚濤.基于有限元法的螺旋鉆采煤機鉆桿結構參數優化[J].機械強度,2017,39(2):327-332.
YU Ning, TIAN Liyong, SUN Jutao. Optimization of Structural Parameters of Screw Drilling Coal Miner Drill Pipe Based on Finite Element Method[J]. Mechanical Strength, 2017,39(2):327-332.
[19]? 朱華,由韶澤.新型煤礦救援機器人研發與試驗[J].煤炭學報,2020,45(6):2170-2181.
ZHU Hua,YOU Shaoze. Research and Testing of New Coal Mine Rescue Robot[J]. Journal of Coal Science, 2020,45(6):2170-2181.
[20]? 胡福生,劉文璽,李秀剛,等.升降平臺剪叉機構模擬優化[J].農業工程,2017,7(3):126-129.
HU Fusheng, LIU Wenxi, LI Xiugang, et al. Simulation Optimization of Shear Mechanism of Lifting Platform[J]. Agricultural Engineering, 2017,7(3):126-129.
(編輯? 胡佳慧)
作者簡介:
田立勇,男,1979年生,副教授。研究方向為煤礦裝備自動化與智能化。E-mail:tianliyong@lntu.edu.cn。
于? 寧(通信作者),女,1979年生,講師。研究方向為礦用設備故障診斷。E-mail:40411287@qq.com。
