電磁懸浮系統的改進線性自抗擾控制方法
2024-06-06 00:00:00楊杰楊星高濤胡海林
電機與控制學報 2024年1期






摘"要:
單點電磁懸浮系統是常導電磁磁浮列車懸浮系統的關鍵控制單元。針對單點電磁懸浮系統因強干擾影響導致控制性能下降的問題,提出了一種改進型線性自抗擾控制(LADRC)方法。首先,基于電磁懸浮結構及原理建立了單點懸浮系統線性化模型,并對系統穩定性進行了分析。其次,基于自抗擾控制方法設計位置外環控制器以及基于PI調節器的電流內環控制器,對線性擴張狀態觀測器進行改進,設計兩級級聯的線性擴張狀態觀測器提高擾動估計精確度及速度,進而提高LADRC中擴張狀態觀測器對系統擾動的估計能力,并在頻域上分析了改進型LADRC擾動估計性能和抑制能力的優越性。最后,搭建實驗環境,對改進線性自抗擾控制方法的有效性進行驗證。實驗結果表明,所提的改進型LADRC不僅具有良好的位置跟蹤性能,同時相比傳統LADRC具有更強的抗擾動能力。
關鍵詞:單點電磁懸浮系統;線性自抗擾控制;級聯擴張狀態觀測器;觀測精確度;頻域分析;抗擾性能
DOI:10.15938/j.emc.2024.01.013
中圖分類號:TM930.2
文獻標志碼:A
文章編號:1007-449X(2024)01-0131-11
Improved linear active disturbance rejection control method for electromagnetic levitation system
YANG Jie1,2,3,"YANG Xing1,2,3,"GAO Tao1,2,3,"HU Hailin1,2,3
(1.School of Electrical Engineering and Automation, Jiangxi University of Science and Technology, Ganzhou 341000, China;2.Institute of Permanent Maglev and Railway Technology, Jiangxi University of Science and Technology, Ganzhou 341000,China;3.Jiangxi Key Laboratory of Maglev Technology, Ganzhou 341000, China)
Abstract:
The singlepoint electromagnetic levitation system is the primary control unit of the electromagnetic suspension maglev trains. Aiming at the problem of system control performance degradation due to the influence of strong disturbances in singlepoint electromagnetic suspension systems, an improved linear active disturbance rejection control (LADRC) method was proposed. Firstly, based on the structure and principle of electromagnetic levitation, the linear model of the singlepoint levitation system was established and the stability of the system was analyzed. Secondly, the position outer loop controller based on active disturbance rejection control method and the current inner loop controller based on PI regulator were designed. After that, the linear extended state observer was improved, and a twostage cascaded linear extended state observer was designed to improve the accuracy and speed of disturbance estimation, so as to improve the disturbance estimation ability of the extended state observer in the system. The advantages of the improved LADRC in disturbance estimation performance and inhibition ability were analyzed in the frequency domain. Finally, an experimental environment was constructed to test effectiveness of the improved linear active disturbance rejection control method. The experimental results indicate that the proposed improved LADRC not only has good position tracking performance, but also has stronger antiinterference capability compared with the conventional LADRC.
Keywords:singlepoint electromagnetic levitation system; linear active disturbance rejection control; cascaded extended state observer; observation precision; frequency domain analysis; disturbance rejection performance
0"引"言
磁懸浮列車[1]憑借著低噪聲、能耗少、無污染、轉彎半徑小等優勢,被視為發展高速軌道交通制式的理想方案。作為未來打造中高速軌道交通運輸網的有力競爭者,被給予極大的期待。電磁懸浮控制系統[2]作為磁懸浮列車的核心技術之一,其控制性能的好壞是磁懸浮列車安全穩定運行的關鍵。
目前,磁懸浮列車的電磁懸浮控制系統易受到內部干擾(懸浮質量變化、傳感器溫漂、電感參數變化等)和外部干擾(直線電機干擾、軌道不平順等)影響,導致傳統PID控制[3]顯得捉襟見肘,需要動態的調整3個參數去應對不同工況。因此,探索一種有效繼承PID控制精髓,同時兼具強抗擾性和魯棒性等優勢的控制策略,對于增強系統的抗擾能力,提高系統穩定性具有重要意義。
自抗擾控制[4](active disturbance rejection control,ADRC)是由韓京清研究員率先提出并逐步完善形成的一種全新的控制策略,其核心思想是通過自抗擾控制器將系統未知部分和內外干擾估計并補償消除,將系統變換成積分串聯型進行控制,是一條有效解決上述磁懸浮列車在懸浮控制過程中存在的問題的途徑。同時,針對非線性ADRC參數眾多,調整困難的問題,高志強教授提出了線性自抗擾控制器[5](linear active disturbance rejection control,LADRC),進一步推廣了ADRC的研究與應用。在磁懸浮領域,何凌云等[6]對比驗證了雙環PID和雙環ADRC控制,突出了ADRC控制性能的優越性;黃翠翠等[7]通過引入LADRC控制,有效提高了磁懸浮復合隔振系統在寬頻帶內的隔振效果。此外,ADRC先后被推廣應用到電機驅動[8]、磁懸浮軸承[9]、整流變電[10]等等領域,表現出強大的算法適應性,特別是針對一些非線性、模型不確定系統。
另一方面,ADRC控制性能主要依賴于其內核的線性擴張狀態觀測器(linear extended state observer,LESO)對擾動的估計水準,但是經典的LADRC存在擾動估計不足,無法被快速抑制的缺點,易造成系統調節時間較長和超調量較大的問題。針對此類問題,國內外研究學者相繼提出了諸多改進策略,李翁衡等[11]通過在LADRC設計中引入電磁軸承轉子系統剛性模型,提高了系統在跨越臨界轉速時的振動抑制能力。周雪松等[12]將母線直流電壓的實際微分量與觀測微分量的誤差引入傳統LESO,減小了估計誤差,增強了并網逆變器的抗擾性能。Yang Li等[13]將電壓逆變器模型部分信息和負載電流作為已知擾動引入LESO,增強了系統抗干擾能力。Zhou Chen等[14]通過火電機組溫度數據,構建ADRC相位補償網絡,提高了溫度控制系統的響應速度。上述改進策略雖然提高了系統的性能,但改進后的LESO設計比較復雜,需要依賴于系統模型信息和增加測試點,不利于算法實現,造成工程應用困難。
綜上所述,在傳統LADRC基礎之上,本文對LESO結構進行改進,提高其對系統總擾動的估計能力,并通過控制律進行消除干擾,進而提高懸浮控制系統的抗擾性能。文章結構可分為:1)建立單點懸浮系統線性化模型,采用串級控制的思想,對電流環設計PI控制器,提高電磁鐵電流響應速度,并將系統近似降為二階,然后對位置環設計LADRC控制器。2)在傳統LADRC基礎上引入級聯結構對LESO進行改進,通過兩級LESO來提高觀測器對系統總擾動的觀測精確度,從頻域角度分析證明改進型LADRC對擾動的估計和抑制能力。3)通過仿真和在單點懸浮實物平臺上進行抗擾對比實驗,驗證改進算法的有效性。
1"單點懸浮系統數學模型
假設磁懸浮列車懸浮架能實現各懸浮點之間的完全解耦[15],則可將列車的懸浮系統簡化為一個單點懸浮系統進行建模分析。單點懸浮系統原理如圖1所示。
圖中:m為懸浮質量;x(t)為懸浮位置;F(x,i)為電磁鐵懸浮力;fd(t)為擾動力;u(t)為電磁鐵兩端電壓;i(t)為線圈電流。
結合懸浮動力學模型[16]分析,易得單點懸浮系統的基本模型:
式中:L為線圈電感;R為線圈電阻;μ0=4π×10-7為真空磁導率;A為電磁鐵有效極面積;N為線圈匝數。
式中:F(x0,i0)為平衡點電磁力;i0和x0分別為平衡電流和平衡位置;Ki和Kx分別為電流剛度系數和位移剛度系數,其中:Ki=μ0AN2i0/2x20,Kx=μ0AN2i20/2x30。
由于電磁鐵位置變化范圍很小,線圈電感量在小范圍內變換[18]不會影響控制分析,假設電磁鐵線圈電感在位置變化過程中不變,則L(x)=L0=μ0AN2/x0;L0為平衡點電感。將式(1)和式(2)進行拉氏變換可得:
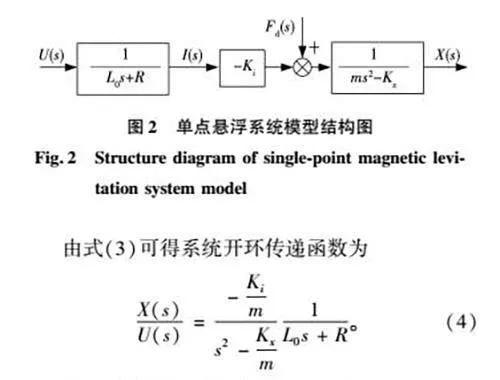
根據式(3)可得系統模型結構如圖2所示。
由式(3)可得系統開環傳遞函數為
由系統特征方程(s2-Kx/m)(L0s+R)=0可知,系統特征值存在正實根,判斷系統為一個三階不穩定系統,需要設計控制器才能實現系統穩定。
2"單點懸浮系統控制設計
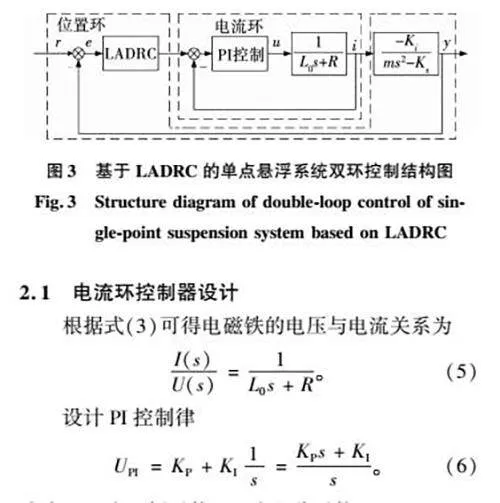
為了克服懸浮電磁鐵的大電感效應[19],本文沿用了傳統磁懸浮技術中的串級控制結構[20]。將單點懸浮系統分解為電流內環子系統和位置外環子系統分別進行控制器設計。電流內環采取PI控制來提高電流響應速度,位置外環采取LADRC控制來實現系統穩定,并增強系統的抗擾性能。基于LADRC的單點懸浮系統雙環控制結構如圖3所示。
2.1"電流環控制器設計
根據式(3)可得電磁鐵的電壓與電流關系為
式中:KP為比例系數;KI為積分系數。
令PI控制系數分別為Kp=L0K,KI=RK,則UPI=(L0s+R)/s·K,電流環的閉環傳遞函數為
式中K為電流環增益。
若K的數值很大,則GI_cl≈1。通過引入式(7)所示PI控制器且將其控制參數K設置為非常大的數值后,可將系統由三階近似降為二階,電流環的控制參數將僅有一個K,這樣設計不僅可以降低控制復雜度,同時還能保證電流響應速度。
2.2"基于改進型LADRC的位置環控制器設計
通過上面電流環控制器對系統近似降階處理后,若設系統狀態變量為x1=y(t),x2=y·(t),取控制輸入u=-i(t),取擴張的系統狀態變量x3=(Kx/m)x1+fd/m=f(x1,x2)+fd/m,作為系統被擴張的總擾動,f(x1,x2)為系統內擾,fd為外部擾動,令x·3=h和b0=b=Ki/m,則系統的狀態方程為:
對位置環系統設計傳統二階LADRC控制器,其中,LESO設計:
式中:e1為觀測誤差;z1為輸出x1的觀測值;z2為x2的觀測值;z3為系統擾動x3的觀測值;b0為控制輸入增益;u為控制量;β1、β2和β3為觀測器增益。
傳統線性狀態誤差反饋控制律:
u0=kp(r-z1)-kdz2;(10)
u=u0-z3b0。(11)
式中:r為設定值;kp和kd為反饋控制增益;u0是中間變量。
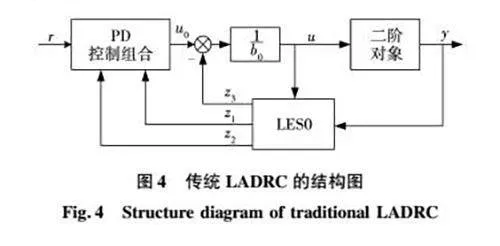
通過控制律將系統總擾動進行消除,可將位置外環系統變換為二階積分串聯形式:y··≈u0。傳統LADRC的結構如圖4所示。
傳統LESO根據系統輸出量和控制量來提取擾動信號,通過控制律來消除擾動,從而減小擾動對被控量的影響。即位置環LADRC控制器對擾動的估計精確度越高,相位滯后越小,則控制律將擾動消除地越精確,速度越快,控制器抗擾效果越好,擾動對位置被控量的影響越小。而傳統LESO通常要先完成對x1的實時觀測,再對x2和x3進行跟蹤,這個過程會造成較大的跟蹤誤差[21],導致擾動無法被完全消除。
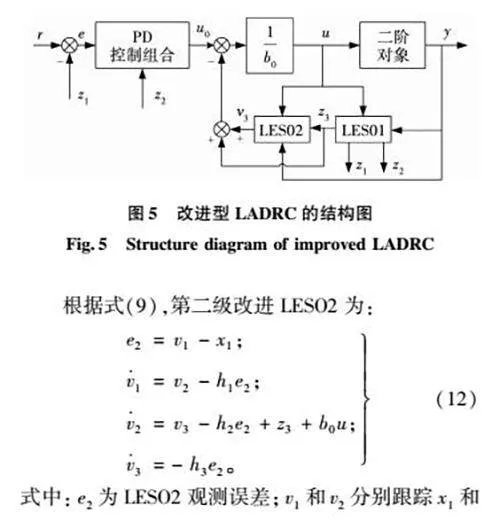
為進一步提高觀測器對擾動的估計精確度,增強系統的抗擾性能,在傳統LESO的基礎上,通過改進LESO結構來提高擾動估計能力。通過配置LESO1的觀測器增益高于LESO2的觀測器增益,第一級LESO1對總擾動進行初步估計,獲得系統部分擾動z3。為了提高干擾估計能力,將LESO1估計出來的z3視為已知部分,并實時反饋給第二級LESO2,通過LESO2同步估計剩余干擾部分v3=x3-z3,則z3+v3為最終估計出來的總擾動。兩級并行LESO共同分擔系統的擾動估計,對于獲得部分系統擾動信息的LESO2,降低了LESO2的觀測負擔[22],不僅加快了第二級LESO2的擾動估計速度,同時還提高了對擾動的估計精確度。改進型LADRC結構如圖5所示。
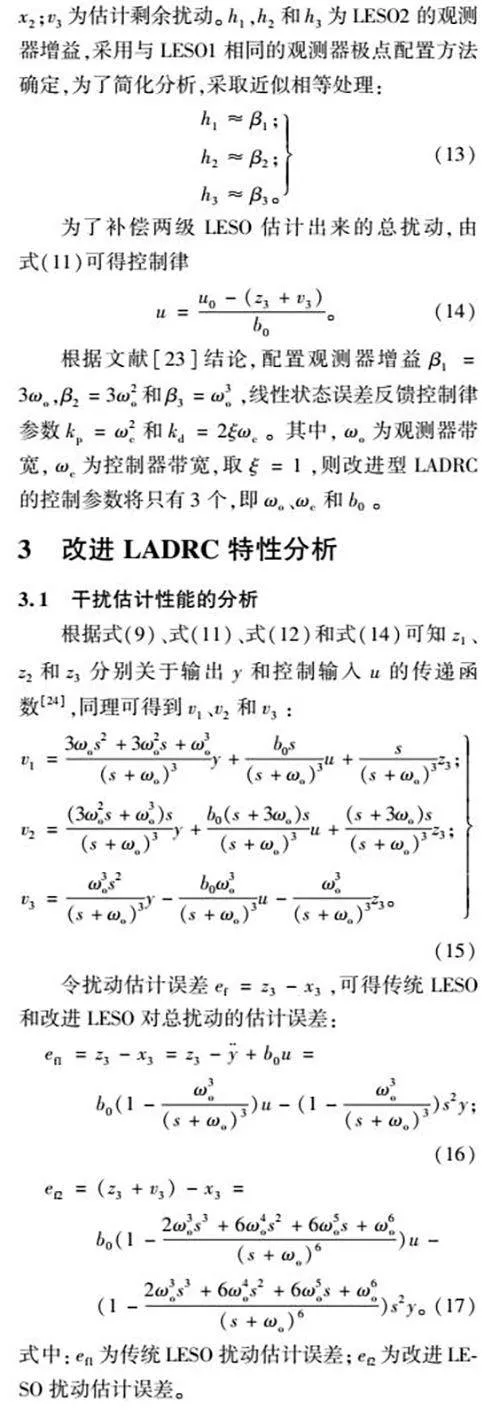
式中:e2為LESO2觀測誤差;v1和v2分別跟蹤x1和x2;v3為估計剩余擾動。h1,h2和h3為LESO2的觀測器增益,采用與LESO1相同的觀測器極點配置方法確定,為了簡化分析,采取近似相等處理:
為了補償兩級LESO估計出來的總擾動,由式(11)可得控制律
根據文獻[23]結論,配置觀測器增益β1=3ωo,β2=3ω2o和β3=ω3o,線性狀態誤差反饋控制律參數kp=ω2c和kd=2ξωc。其中,ωo為觀測器帶寬,ωc為控制器帶寬,取ξ=1,則改進型LADRC的控制參數將只有3個,即ωo、ωc和b0。
3"改進LADRC特性分析
3.1"干擾估計性能的分析
根據式(9)、式(11)、式(12)和式(14)可知z1、z2和z3分別關于輸出y和控制輸入u的傳遞函數[24],同理可得到v1、v2和v3:
式中:ef1為傳統LESO擾動估計誤差;ef2為改進LESO擾動估計誤差。
當輸出y受到幅值為KT的階躍干擾時,即y(s)=KT/s,代入式(16)和式(17)可得穩態估計誤差:
由上式可知,通過配置合適的觀測器增益,兩種觀測器均可以實現對系統輸出階躍擾動的無穩態誤差觀測。
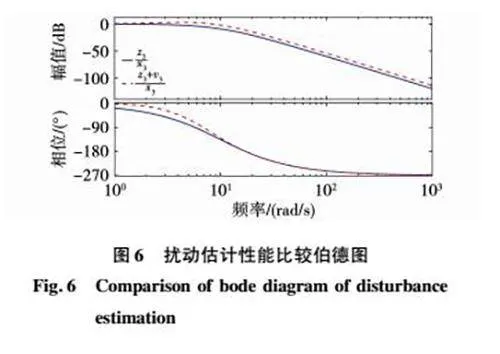
令ωo=20 rad/s,根據式(19)與式(20)可得到兩種觀測器的擾動估計比較伯德圖,如圖6所示。兩種觀測器對于由低頻分量組成的擾動都可以很好的估計。在控制器有效帶寬ωc=15 rad/s內,改進LESO的觀測速度要快于傳統LESO。假設系統總擾動被完全估計出來,則觀測器對總擾動的幅值響應將等于1,而改進LESO在中高頻段具有更高的幅值,說明其對擾動估計的更精確,有利于消除懸浮傳感器反饋線路中的高頻噪聲干擾。
3.2"抗干擾性能分析
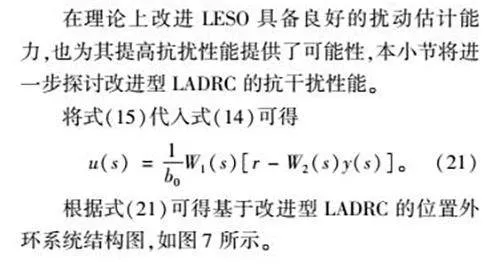
在理論上改進LESO具備良好的擾動估計能力,也為其提高抗擾性能提供了可能性,本小節將進一步探討改進型LADRC的抗干擾性能。
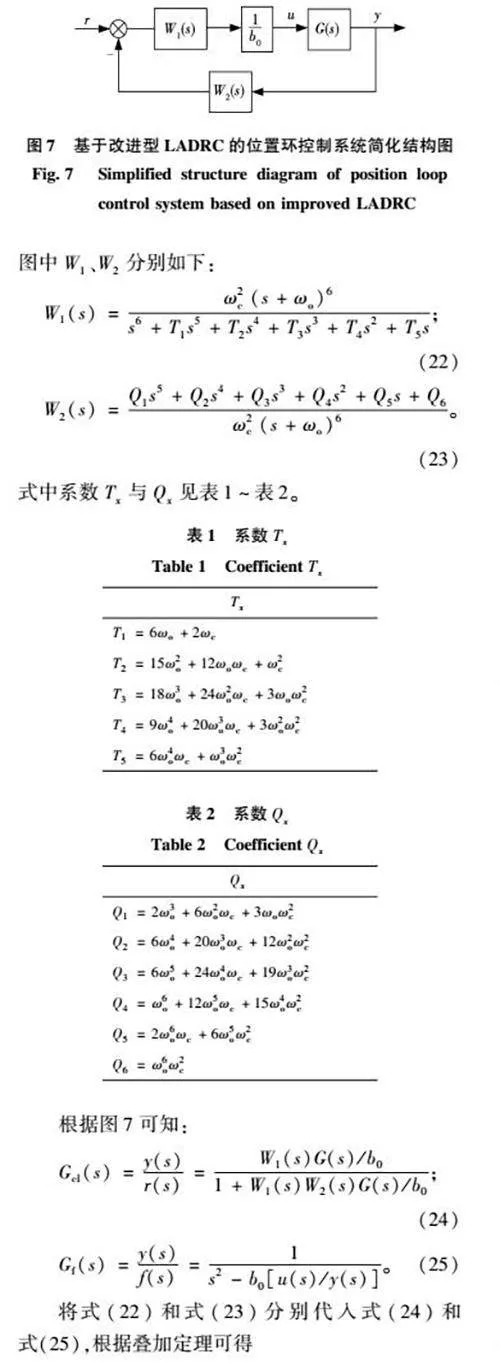
將式(15)代入式(14)可得
根據式(21)可得基于改進型LADRC的位置外環系統結構圖,如圖7所示。
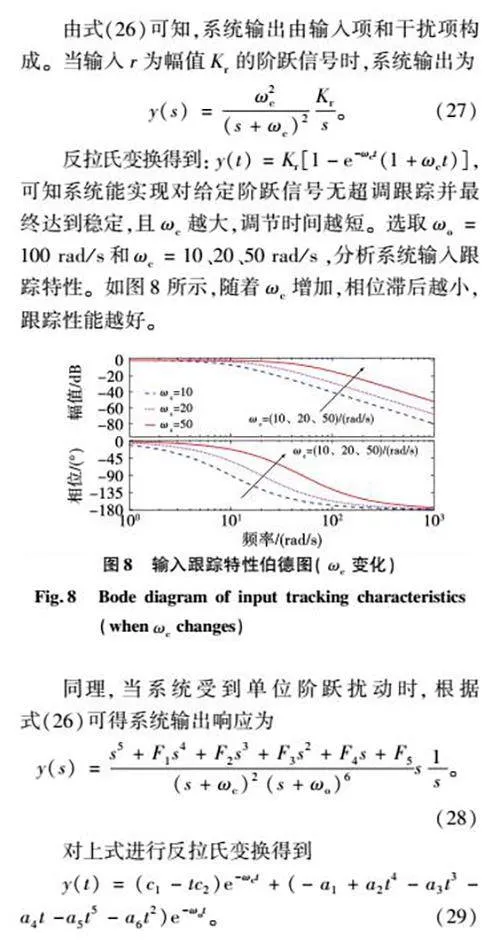
反拉氏變換得到:y(t)=Kr[1-e-ωct(1+ωct)],可知系統能實現對給定階躍信號無超調跟蹤并最終達到穩定,且ωc越大,調節時間越短。選取ωo=100 rad/s和ωc=10、20、50 rad/s,分析系統輸入跟蹤特性。如圖8所示,隨著ωc增加,相位滯后越小,跟蹤性能越好。
圖8"輸入跟蹤特性伯德圖(ωc變化)
Fig.8"Bode diagram of input tracking characteristics(when ωc changes)
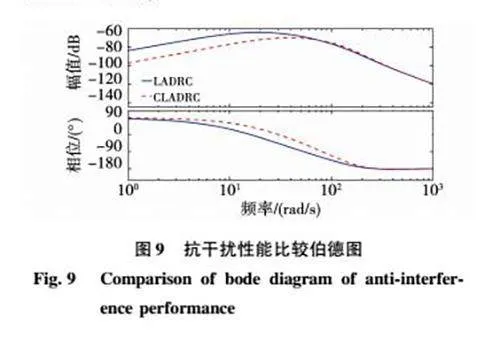
同理,當系統受到單位階躍擾動時,根據式(26)可得系統輸出響應為
由limt→∞y(t)=0可知,系統對擾動的穩態響應為0。選取ωo=150 rad/s和ωc=20 rad/s,比較兩種算法的抗干擾性能,如圖9所示。由于本文改進LADRC是對改進LESO采用了級聯結構,在結果圖中均簡稱為CLADRC。在系統控制器帶寬ωc范圍內,改進型LADRC的幅值要低于傳統LADRC的幅值,說明由干擾信號產生的系統輸出量占總輸出量的比例更小,采用改進型LADRC提高了系統對干擾的抑制性能。
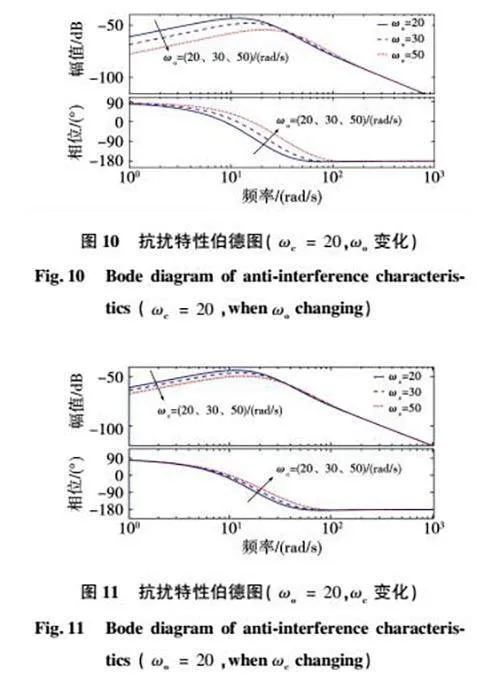
由式(26)可知,系統干擾項主要由ωo和ωc構成。在圖10中,選取ωc=20 rad/s和ωo=20、30、50 rad/s,分析ωo變化對系統抗干擾性能的影響。在圖11中,選取ωo=20 rad/s和ωc=20、30、50 rad/s,分析ωc變化對系統抗干擾性能的影響。由圖10和圖11可知,隨著ωo和ωc增大,系統擾動輸出增益減小,即增大ωo和ωc將增強系統的抗擾性能。
4"仿真與實驗
4.1"仿真分析
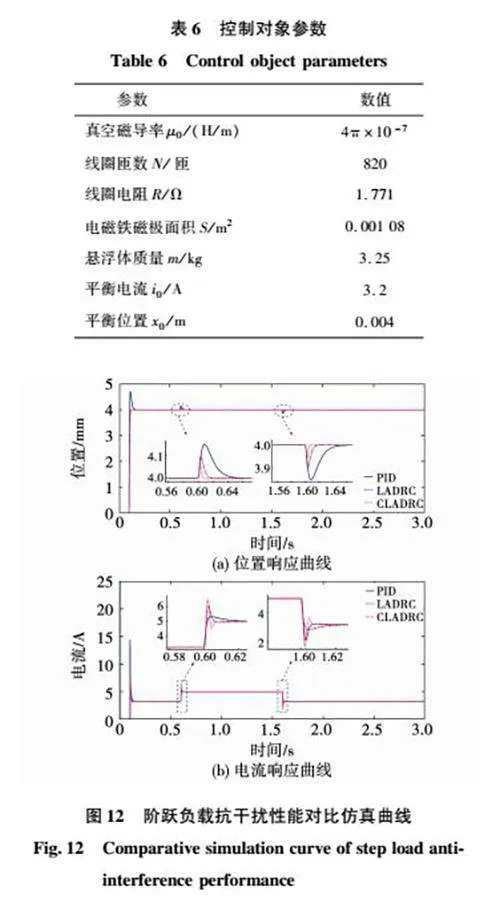
為了驗證所提控制方法的有效性,本文將改進型LADRC作為單點懸浮系統位置外環控制器,并與PID和傳統LADRC進行抗擾對比實驗。3種算法均結合相同PI控制參數(KP=354.2,KI=22.8)的電流環構成雙環控制器。模型參數如表6所示。
圖12為階躍負載抗干擾性能對比仿真曲線,圖12(a)和圖12(b)分別為位置響應和電流響應曲線。在0.6 s給系統突加5倍階躍負載擾動,持續1 s后,突減5倍階躍負載擾動。由圖可知,在PID控制下,系統經過50 ms調節時間重新回到平衡位置4 mm,達到新的平衡電流5.1 A,期間位置最大偏移量為0.16 mm。在傳統LADRC控制下,調節時間為20 ms,位置偏移量為0.1 mm。而在改進型LADRC控制下,僅需10 ms調節時間就能恢復穩定且位置偏移量僅有0.05 mm。對比仿真結果可知,所提的改進型LADRC的抗擾性能要明顯強于PID,而相比于傳統LADRC,由于改進型LADRC對系統擾動的估計能力要優于傳統LADRC,并通過線性狀態誤差反饋控制律及時地消除擾動后,可以使系統更快恢復平衡,并減小擾動對系統位置的影響。
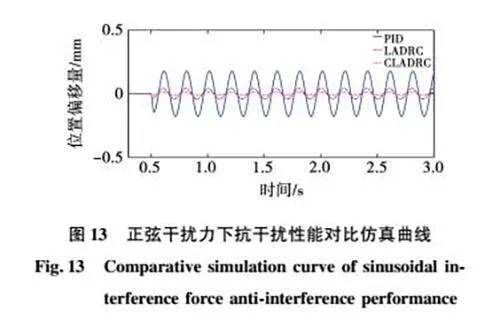
圖13為正弦干擾力下的抗干擾性能對比仿真曲線。為了驗證系統對周期性擾動力的抗擾能力,在0.5 s施加周期性325sin(10πt)N的干擾力,通過位置偏移量對比3種算法對周期性干擾的抗擾能力。由圖可知,在PID控制下的系統位置波動范圍為0.35 mm,在傳統LADRC控制下的位置波動范圍為0.082 mm,而在改進型LADRC控制下,位置波動范圍僅有0.022 mm,位置量幾乎不受到影響。對比仿真結果可知,針對周期性擾動,改進型LADRC具有更強的魯棒性。
4.2"實驗驗證
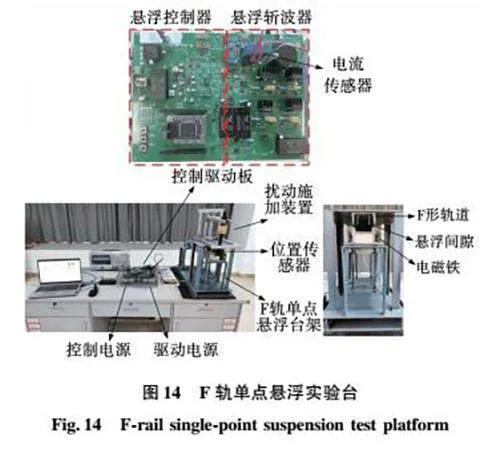
為了進一步驗證改進型LADRC的控制性能,在如圖14所示的F軌單點懸浮實驗臺上面進行了實驗。試驗臺由懸浮控制器(DSP TMS320F28335)、懸浮斬波器、24 V開關電源、懸浮臺架、擾動施加裝置、電渦流位置傳感器、電流傳感器組成。
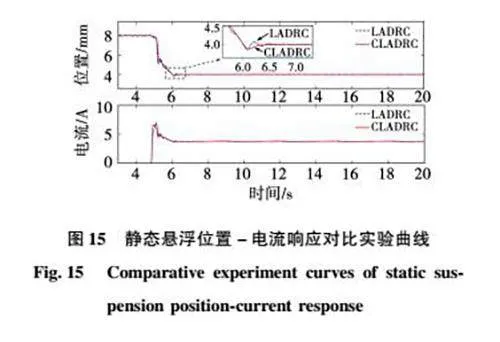
實驗一:設定位置的靜態懸浮。
圖15為懸浮電磁鐵從初始位置8 mm到達設定位置4 mm的位置-電流響應對比曲線。為了防止起浮電流過大,實際給定為一個斜坡過渡信號,并采用相同的控制參數(ωo=70,ωc=10.2,b0=6)。由圖可知,兩種算法均存在0.14 mm的位置超調量,改進型LADRC的調節時間與傳統LADRC基本相同,起浮階段電流峰值均達到了6.8 A,到達平衡電流3.8 A穩定后波動較小。對比實驗結果可知,對于設定跟蹤信號,改進型LADRC繼承了傳統LADRC優秀的動態性能,具有跟蹤速度快和超調量小的特點。可以實現快速無超調的跟蹤且穩定后電流波動小,有利于保持系統的穩定性。
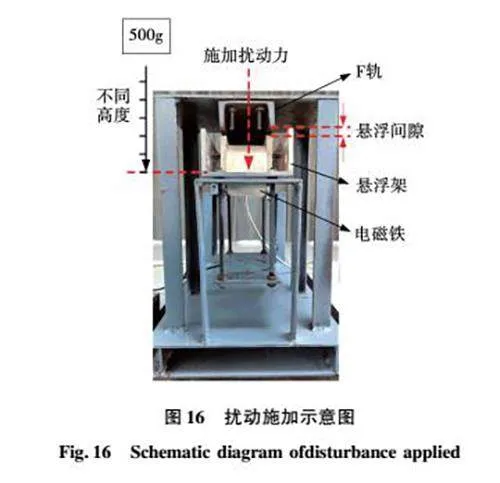
實驗二:沖擊性抗擾對比實驗。
圖16為擾動施加示意圖。如圖所示,采用質量為500 g的物體,分別從不同的高度以自由落體形式施加在懸浮架上,來驗證控制器對不同強度的沖擊性擾動的抗干擾性能。
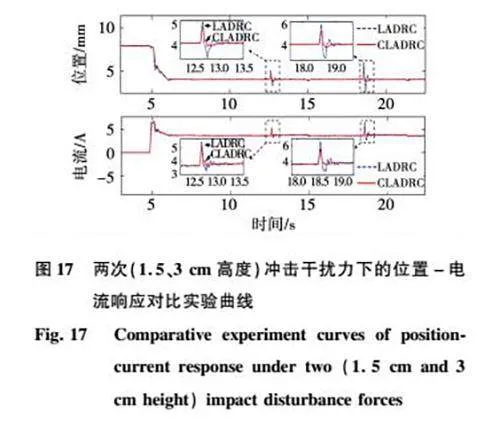
圖17為在兩次(1.5、3 cm高度)沖擊干擾力下的位置-電流響應對比實驗曲線。兩種算法采取相同的控制參數(ωo=70,ωc=12.5,b0=6.5)。電磁鐵在4 mm平衡位置穩定懸浮后,在12.5 s時刻附近,施加1.5 cm高度的沖擊性干擾,持續3 s后停止作用。由圖可知,若采用傳統LADRC控制,系統在平衡位置上下波動范圍為1.73 mm,經過1.1 s調節時間回到平衡位置,而采用改進型LADRC控制方法時,位置波動范圍為0.8 mm,基本沒有向上的超調量,系統僅需0.5 s調節時間,即可回到平衡位置。在18.5 s時刻附近,再次施加3 cm高度的沖擊性干擾,同樣持續3s,可見傳統LADRC的位置波動范圍為3.3 mm,調節時間為1.2 s,而改進型LADRC的位置波動范圍為1.4 mm,調節時間為0.8 s。對比兩次抗擾實驗結果可知,相比于傳統LADRC,采用改進型LADRC控制,系統位置偏移量平均減小了55%,調節時間平均縮短了43%。改進LESO增強了LADRC對擾動的觀測精確度和觀測速度,從而提高了位置環控制器的抗干擾性能。
圖18為在5 cm高度沖擊性干擾力下的位置-電流響應對比實驗曲線。由圖可知,若采用改進型LADRC控制,系統在平衡位置上下波動范圍為4.92 mm,經過1 s調節時間后可以重新恢復穩定。而當采用傳統LADRC控制時,在相同干擾力作用下,發生了砸軌現象,消除干擾后系統才能重新恢復穩定。對比實驗結果可知,改進型LADRC可使系統應對更高強度的沖擊性干擾,提高了系統的魯棒性。
5"結"論
為了提高磁懸浮列車電磁懸浮控制系統的抗擾能力,本文提出了一種基于級聯線性擴張狀態觀測器的改進型LADRC控制方法,并得到如下結論:
1)采用兩級級聯的線性擴張狀態觀測器去估計系統擾動,可以減小觀測器的估計負擔,提高擾動估計精確度和速度,促進控制律更精確和快速的消除干擾,從而提高系統抗擾能力。
2)通過頻域分析,改進型LADRC的擾動估計能力和干擾抑制能力要優于傳統LADRC。仿真驗證了改進型LADRC的有效性,進一步實驗測試結果表明,相比于傳統LADRC,改進型LADRC不僅具有良好的位置跟蹤性能,同時還可顯著增強系統在應對沖擊性干擾時的抗擾性能,提高系統的穩定性。
參 考 文 獻:
[1]"徐飛, 羅世輝, 鄧自剛. 磁懸浮軌道交通關鍵技術及全速度域應用研究[J]. 鐵道學報, 2019, 257(3): 40.
XU Fei, LUO Shihui, DENG Zigang. Study on key technologies and whole speed range application of maglev rail transport[J]. Journal of the China Railway Society, 2019, 257(3): 40.
[2]"馬衛華, 羅世輝, 張敏, 等. 中低速磁浮車輛研究綜述[J]. 交通運輸工程學報, 2021, 21(1): 199.
MA Weihua, LUO Shihui, ZHANG Min, et al. Research review on medium and low speed maglev vehicle[J]. Journal of Traffic and Transportation Engineering, 2021, 21(1): 199.
[3]"KIM J, HA C W, KING G B, et al. Experimental development of levitation control for a highaccuracy magnetic levitation transport system[J]. ISA Transactions, 2020, 101: 358.
[4]"HAN J. From PID to active disturbance rejection control[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 900.
[5]"GAO Z. Active disturbance rejection control: from an enduring idea to an emerging technology[C]//2015 10th International Workshop on Robot Motion and Control (RoMoCo), July 6-8, 2015,Poznan, Poland. 2015: 269-282.
[6]"何凌云. 磁懸浮系統的自抗擾控制[D]. 長沙:國防科學技術大學, 2007.
[7]"黃翠翠, 李曉龍, 楊洋, 等. 基于自抗擾技術的機械-電磁懸浮復合隔振控制[J]. 西南交通大學學報, 2022, 57(3): 582.
HUANG Cuicui, LI Xiaolong, YANG Yang, et al. Mechanicalelectromagnetic suspension compound vibration isolation control based on active disturbance rejection technology[J]. Journal of Southwest Jiaotong University, 2022, 57(3): 582.
[8]"ZHU J, GE Q. Traction system research of highspeed maglev train based on ADRC[C]//2019 22nd International Conference on Electrical Machines and Systems (ICEMS), August 11-14, 2019, Harbin, China. 2019: 1-4.
[9]"WANG S, ZHU H, WU M, et al. Active disturbance rejection decoupling control for threedegreeoffreedom sixpole active magnetic bearing based on BP neural network[J]. IEEE Transactions on Applied Superconductivity, 2020, 30(4): 1.
[10]"HE H, SI T, SUN L, et al. Linear active disturbance rejection control for threephase voltagesource PWM rectifier[J]. IEEE Access, 2020, 8: 45050.
[11]"李翁衡, 祝長生. 基于剛性轉子模型輔助線性自抗擾的電磁軸承-柔性轉子系統過二階彎曲臨界轉速振動控制[J]. 中國電機工程學報, 2023,43(6): 2413.
LI Wengheng, ZHU Changsheng. Vibration control of an active magnetic bearingflexible rotor system passing the second bending critical speed based on linear active disturbance control assisted by rigid rotor model[J]. Proceedings of the CSEE, 2023, 43(6): 2413.
[12]"周雪松, 周泳良, 馬幼捷, 等. 風電并網逆變器的改進型線性自抗擾控制[J]. 電氣傳動, 2022, 399(1): 46.
ZHOU Xuesong, ZHOU Yongliang, MA Youjie, et al. Improved linear active disturbance rejection control of wind powergridconnected inverter[J]. Electric Drive, 2022, 399(1): 46.
[13]"LI Y, QI R, DAI M, et al. Linear active disturbance rejection control strategy with known disturbance compensation for voltagecontrolled inverter[J]. Electronics, 2021, 10(10): 1137.
[14]"CHEN Z, HAO Y S, SUN L, et al. Phase compensation based active disturbance rejection control for high order superheated steam temperature system[J]. Control Engineering Practice, 2022, 126: 105200.
[15]"馬衛華, 胡俊雄, 李鐵, 等. EMS型中低速磁浮列車懸浮架技術研究綜述[J]. 西南交通大學學報, 2023, 58(4): 720.
MA Weihua, HU Junxiong, LI Tie, et al. Technologies research review of electromagnetic suspension mediumlowspeed maglev train levitation frame[J]. Journal of Southwest Jiaotong University, 2023, 58(4): 720.
[16]"SHI Y, MA W, LI M, et al. Research on dynamics of a new highspeed maglev vehicle[J]. Vehicle System Dynamics, 2022, 60(3): 721.
[17]"王成杰, 伍星, 張靜, 等. 中低速磁浮列車懸浮控制策略研究綜述[J]. 電氣自動化, 2019, 41(5): 1.
WANG Chenjie, WU Xing, ZHANG Jing, et al. Summary of researches on levitation control strategies for low and medium speed maglev trains[J]. Electrical Automation, 2019, 41(5): 1.
[18]"靖永志,王森,馮偉, 等. 基于電磁鐵附加線圈的懸浮間隙檢測方法研究[J]. 中國電機工程學報, 2023, 43(17): 6807.
JING Yongzhi, WANG Sen, FENG Wei, et al. Research on the method of levitation gap detection based on electromagnet with an additional coil[J]. Proceedings of the CSEE, 2023, 43(17): 6807.
[19]"蔣啟龍, 梁達, 閻楓. 數字單周期電流控制在電磁懸浮系統中的應用[J]. 西南交通大學學報, 2019, 54(1): 1.
JIANG Qilong, LIANG Da, YAN Feng. Application of digital onecycle control for current in electromagnetic suspension system[J]. Journal of Southwest Jiaotong University, 2019, 54(1): 1.
[20]"WU Q, CUI N, ZHAO S, et al. Modeling and control of a six degrees of freedom maglev vibration isolation system[J]. Sensors, 2019, 19(16): 3608.
[21]"姜仁華, 劉闖, 寧銀行,等. 雷達伺服系統的高跟蹤精確度改進型自抗擾控制器[J]. 電機與控制學報, 2019, 23(5): 102.
JIANG Renhua, LIU Chuang, NING Yinhang, et al. Improved autodisturbance rejection controller of radar servosystem with high tracking accuracy[J]. Electric Machines and Control, 2019, 23(5): 102.
[22]"張越杰, 張鵬, 冉承平,等. 擾動分離自抗擾控制在光電穩定平臺上的應用[J]. 紅外與激光工程, 2021, 50(10): 244.
ZHANG Yuejie, ZHANG Peng, RAN Chengping, et al. Application of a disturbance separation active disturbance rejection control in photoelectric stabilized platform[J]. Infrared and Laser Engineering, 2021, 50(10): 244.
[23]"李健, 譚文, 張彬文. 觀測器帶寬參數化的自抗擾控制[J]. 控制工程, 2022, 29(7): 1181.
LI Jian, TAN Wen, ZHNAG Binwen. Observer bandwidth based active disturbance rejection control[J]. Control Engineering of China, 2022, 29(7): 1181.
[24]"袁東, 馬曉軍, 曾慶含, 等. 二階系統線性自抗擾控制器頻帶特性與參數配置研究[J]. 控制理論與應用, 2013, 30(12): 1630.
YUAN Dong, MA Xiaojun, ZENG Qinghan, et al. Research on frequencyband characteristics and parameters configuration of linear active disturbance rejection control for secondorder systems[J]. Control Theory amp; Applications, 2013, 30(12): 1630.
(編輯:劉素菊)
收稿日期: 2022-06-21
基金項目:國家自然科學基金(62063009);江西省研究生創新專項資金(YC2020-B156)
作者簡介:楊"杰(1979—),男,博士,教授,博士生導師,研究方向為磁懸浮控制;
楊"星(1997—),男,碩士研究生,研究方向為磁懸浮控制;
高"濤(1991—),男,博士研究生,研究方向為磁懸浮優化控制;
胡海林(1984—),男,博士,講師,研究方向為磁懸浮控制、直線電機及其優化控制設計。
通信作者:胡海林
