融合響應(yīng)先驗(yàn)信息和加權(quán)字典的移動(dòng)荷載識(shí)別
2024-10-24 00:00:00余嶺雷遠(yuǎn)東侯支龍
振動(dòng)工程學(xué)報(bào) 2024年10期





摘要: 稀疏正則化方法已被證明能夠有效解決移動(dòng)荷載識(shí)別(MFI)中的不適定性問題。然而,現(xiàn)有研究往往忽略了移動(dòng)荷載中靜態(tài)與動(dòng)態(tài)分量之間的差異,導(dǎo)致識(shí)別精度受限。為此,提出了一種融合響應(yīng)先驗(yàn)信息和加權(quán)字典的移動(dòng)荷載識(shí)別方法。建立了車橋系統(tǒng)中車致橋梁響應(yīng)與移動(dòng)車載之間的線性關(guān)系。分別對(duì)彎矩和加速度響應(yīng)開展頻域分析,將獲得的頻率先驗(yàn)信息分別用于構(gòu)建與靜態(tài)和動(dòng)態(tài)荷載分量相匹配的加權(quán)字典。利用該加權(quán)字典,采用ADMM (Alternating Direction Method of Multipliers)分別求解移動(dòng)荷載中的靜態(tài)和動(dòng)態(tài)分量。通過實(shí)橋數(shù)值案例證明了所提方法的有效性,并在實(shí)驗(yàn)室開展了一系列MFI實(shí)驗(yàn)驗(yàn)證。結(jié)果表明,融合響應(yīng)先驗(yàn)信息和加權(quán)字典能夠有效提升荷載識(shí)別精度,并增強(qiáng)其對(duì)噪聲的魯棒性。
關(guān)鍵詞: 移動(dòng)荷載識(shí)別; 橋梁健康監(jiān)測(cè); 響應(yīng)先驗(yàn)信息; 加權(quán)字典; 稀疏正則化
中圖分類號(hào): U441+. 2; TU311. 3 文獻(xiàn)標(biāo)志碼: A 文章編號(hào): 1004-4523(2024)10-1660-09
DOI:10.16385/j.cnki.issn.1004-4523.2024.10.003
引 言
移動(dòng)車輛荷載(MVL)是橋梁全生命周期的主要活荷載之一。如果橋梁上的MVL超過安全范圍,可能引發(fā)橋梁疲勞劣化和結(jié)構(gòu)損傷的逐漸惡化,甚至導(dǎo)致橋梁的坍塌。因此,準(zhǔn)確地評(píng)估作用在橋梁上的MVL對(duì)于橋梁健康監(jiān)測(cè)和安全預(yù)警至關(guān)重要。
在早期階段,研究人員主要致力于識(shí)別移動(dòng)車輛的靜態(tài)軸重[1]。然而,車輛荷載的動(dòng)力效應(yīng)會(huì)導(dǎo)致更大的橋梁響應(yīng),由其引起的平均橋面損傷量是靜態(tài)軸重的2~4倍[2]。為此,大量學(xué)者、工程師和科學(xué)家提出了包含靜態(tài)和時(shí)變分量的MFI方法[3?6]。其中以Law等 [5]提出的時(shí)域法(TDM)為典型代表。TDM理論簡(jiǎn)單、識(shí)別精度高,但在逆問題求解過程中具有較強(qiáng)的不適定性,對(duì)測(cè)量噪聲較為敏感。
為了解決不適定性問題,一些正則化方法,如Tikhonov正則化[7?9]、截?cái)鄰V義奇異值分解(TGSVD)[10?11]和稀疏正則化[12?14]等被引入到MFI領(lǐng)域。稀疏正則化是一種比較新的技術(shù),其求解的關(guān)鍵在于正則化參數(shù)和字典的選擇。正則化參數(shù)可通過貝葉斯信息準(zhǔn)則(BIC)或L曲線方法確定。字典由各種基函數(shù)組成,合適的基函數(shù)可以擬合不同形式的移動(dòng)車載。常見的基函數(shù)類型包含正余弦函數(shù)[15]、B樣條函數(shù)[16]和小波函數(shù)[17]等。Zhou等[18]將移動(dòng)荷載用一組離散余弦字典展開,在不同橋梁模型中實(shí)現(xiàn)了單軸和雙軸移動(dòng)荷載的有效識(shí)別。Xu等[19]利用Haar小波優(yōu)越的函數(shù)逼近能力,將其構(gòu)建成冗余字典并用于移動(dòng)荷載識(shí)別。此外,為了提高字典的逼近性能,Pan等[20]提出了一種更適合MVL特征的三角函數(shù)和矩形函數(shù)組合字典。通過豐富字典中的基函數(shù)類型,可以更準(zhǔn)確地捕捉MVL的頻率特征。然而,由于橋梁振動(dòng)、路面不平度和橋面凹凸等因素的影響,車?橋耦合系統(tǒng)中真實(shí)車載的具體形式未知且復(fù)雜[21]。如果采用固定的字典形式,往往不能準(zhǔn)確描述MVL,從而無法充分對(duì)其稀疏表達(dá)。因此,迫切需要一種自適應(yīng)的改進(jìn)字典,以適應(yīng)更復(fù)雜的MVL。此外,由MVL引起的橋梁響應(yīng)相對(duì)容易獲得,其頻率信息通常與移動(dòng)車載的頻率特征相關(guān)。然而,以往學(xué)者往往對(duì)此缺乏考慮,忽略了橋梁響應(yīng)中的先驗(yàn)信息。
針對(duì)以上問題,本文提出了一種融合響應(yīng)先驗(yàn)信息和加權(quán)字典的移動(dòng)荷載識(shí)別方法。該方法首先建立橋梁響應(yīng)與移動(dòng)荷載之間的線性關(guān)系。然后將彎矩和加速度響應(yīng)分別展開至頻域中,提取與移動(dòng)荷載靜態(tài)和動(dòng)態(tài)分量相關(guān)的頻率信息。進(jìn)而對(duì)字典進(jìn)行加權(quán),構(gòu)造出能夠匹配兩個(gè)荷載分量特征的加權(quán)字典。最后,采用不同的加權(quán)字典分別識(shí)別移動(dòng)荷載中的靜態(tài)和動(dòng)態(tài)分量,以進(jìn)一步提升移動(dòng)荷載的識(shí)別精度和噪聲魯棒性。
1 基本理論
1.1 MFI控制方程
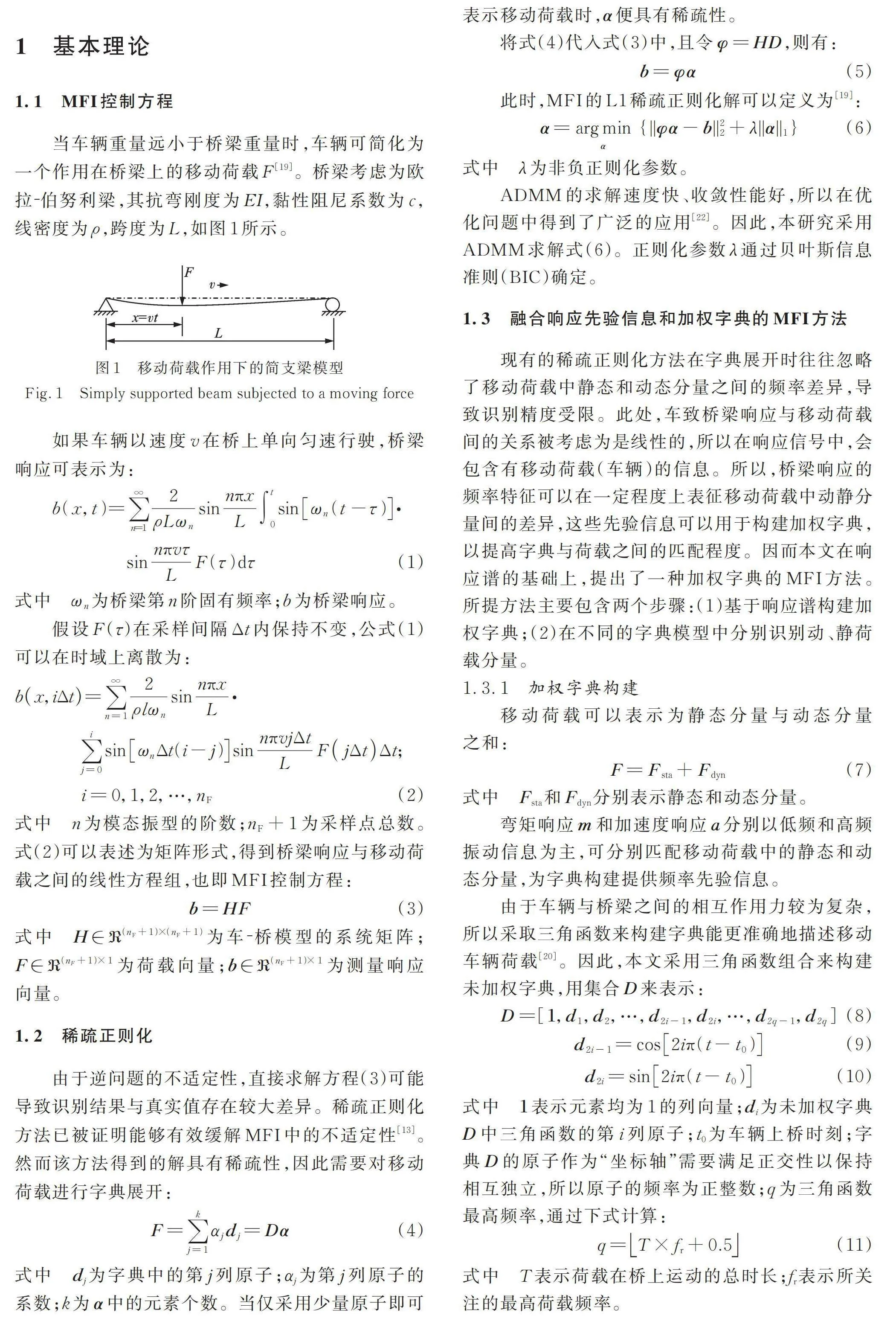
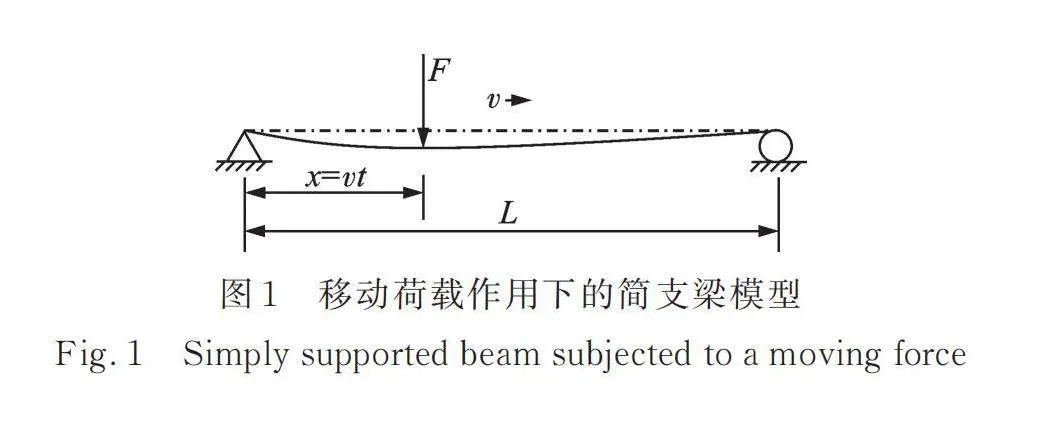
當(dāng)車輛重量遠(yuǎn)小于橋梁重量時(shí),車輛可簡(jiǎn)化為一個(gè)作用在橋梁上的移動(dòng)荷載F[19]。橋梁考慮為歐拉?伯努利梁,其抗彎剛度為EI,黏性阻尼系數(shù)為c,線密度為ρ,跨度為L(zhǎng),如圖1所示。
如果車輛以速度v在橋上單向勻速行駛,橋梁響應(yīng)可表示為:
(1)
式中 為橋梁第n階固有頻率;b為橋梁響應(yīng)。
假設(shè)F(τ)在采樣間隔Δt內(nèi)保持不變,公式(1)可以在時(shí)域上離散為:
(2)
式中 n為模態(tài)振型的階數(shù);為采樣點(diǎn)總數(shù)。式(2)可以表述為矩陣形式,得到橋梁響應(yīng)與移動(dòng)荷載之間的線性方程組,也即MFI控制方程:
(3)
式中 為車?橋模型的系統(tǒng)矩陣;為荷載向量;為測(cè)量響應(yīng)向量。
1.2 稀疏正則化
由于逆問題的不適定性,直接求解方程(3)可能導(dǎo)致識(shí)別結(jié)果與真實(shí)值存在較大差異。稀疏正則化方法已被證明能夠有效緩解MFI中的不適定性[13]。然而該方法得到的解具有稀疏性,因此需要對(duì)移動(dòng)荷載進(jìn)行字典展開:
(4)
式中 dj為字典中的第j列原子;αj為第j列原子的系數(shù);k為α中的元素個(gè)數(shù)。當(dāng)僅采用少量原子即可表示移動(dòng)荷載時(shí),α便具有稀疏性。
將式(4)代入式(3)中,且令,則有:
(5)
此時(shí),MFI的L1稀疏正則化解可以定義為[19]:
(6)
式中 λ為非負(fù)正則化參數(shù)。
ADMM的求解速度快、收斂性能好,所以在優(yōu)化問題中得到了廣泛的應(yīng)用[22]。因此,本研究采用ADMM求解式(6)。正則化參數(shù)λ通過貝葉斯信息準(zhǔn)則(BIC)確定。
1.3 融合響應(yīng)先驗(yàn)信息和加權(quán)字典的MFI方法
現(xiàn)有的稀疏正則化方法在字典展開時(shí)往往忽略了移動(dòng)荷載中靜態(tài)和動(dòng)態(tài)分量之間的頻率差異,導(dǎo)致識(shí)別精度受限。此處,車致橋梁響應(yīng)與移動(dòng)荷載間的關(guān)系被考慮為是線性的,所以在響應(yīng)信號(hào)中,會(huì)包含有移動(dòng)荷載(車輛)的信息。所以,橋梁響應(yīng)的頻率特征可以在一定程度上表征移動(dòng)荷載中動(dòng)靜分量間的差異,這些先驗(yàn)信息可以用于構(gòu)建加權(quán)字典,以提高字典與荷載之間的匹配程度。因而本文在響應(yīng)譜的基礎(chǔ)上,提出了一種加權(quán)字典的MFI方法。所提方法主要包含兩個(gè)步驟:(1)基于響應(yīng)譜構(gòu)建加權(quán)字典;(2)在不同的字典模型中分別識(shí)別動(dòng)、靜荷載分量。
1.3.1 加權(quán)字典構(gòu)建
移動(dòng)荷載可以表示為靜態(tài)分量與動(dòng)態(tài)分量之和:
(7)
式中 Fsta和Fdyn分別表示靜態(tài)和動(dòng)態(tài)分量。
彎矩響應(yīng)m和加速度響應(yīng)a分別以低頻和高頻振動(dòng)信息為主,可分別匹配移動(dòng)荷載中的靜態(tài)和動(dòng)態(tài)分量,為字典構(gòu)建提供頻率先驗(yàn)信息。
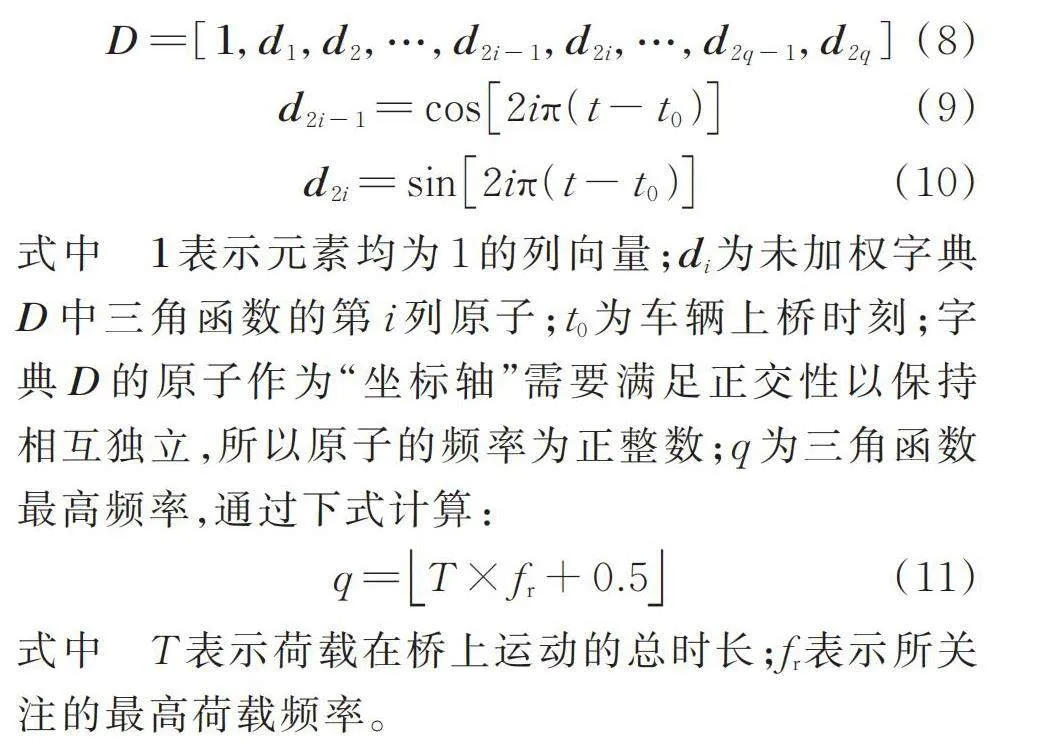
由于車輛與橋梁之間的相互作用力較為復(fù)雜,所以采取三角函數(shù)來構(gòu)建字典能更準(zhǔn)確地描述移動(dòng)車輛荷載[20]。因此,本文采用三角函數(shù)組合來構(gòu)建未加權(quán)字典,用集合D來表示:
(8)
(9)
(10)
式中 表示元素均為1的列向量;di為未加權(quán)字典D中三角函數(shù)的第i列原子;t0為車輛上橋時(shí)刻;字典D的原子作為“坐標(biāo)軸”需要滿足正交性以保持相互獨(dú)立,所以原子的頻率為正整數(shù);q為三角函數(shù)最高頻率,通過下式計(jì)算:
(11)
式中 T表示荷載在橋上運(yùn)動(dòng)的總時(shí)長(zhǎng);fr表示所關(guān)注的最高荷載頻率。
得到橋梁彎矩和加速度響應(yīng)后,可通過快速傅里葉變換(FFT)從中提取頻率信息。橋梁的頻域響應(yīng)可表示為:
(12)
式中 B表示橋梁響應(yīng)在各個(gè)頻率處的幅值向量;bi為向量B中第i個(gè)元素。為了對(duì)字典進(jìn)行加權(quán),需要使向量B的頻率分辨率為1。方法中對(duì)響應(yīng)數(shù)據(jù)的頻率分辨率Δf有一定要求:1能夠被Δf整除。若無法滿足1能夠被Δf整除的條件,則只能夠選擇離整數(shù)頻率最近的值作為近似,以對(duì)應(yīng)字典中的原子,但這會(huì)導(dǎo)致所提方法的精度下降,所以需要盡可能滿足頻率分辨率的要求。
根據(jù)橋梁響應(yīng)的頻率特征信息,加權(quán)字典Dw可表示為:
(13)
式中 b1為1 Hz處的響應(yīng)信號(hào)幅值,與頻率為1 Hz的原子d1和d2對(duì)應(yīng),其余同理。
由彎矩和加速度頻率信息可分別得到靜載加權(quán)字典和動(dòng)載加權(quán)字典。
1.3.2 動(dòng)靜分量識(shí)別
首先識(shí)別靜態(tài)分量Fsta,將代入式(6)得:
(14)
(15)
式中 αsta為靜態(tài)分量Fsta對(duì)應(yīng)的稀疏向量。
由字典的構(gòu)造可知,αsta中第一個(gè)元素對(duì)應(yīng)移動(dòng)荷載中的零頻項(xiàng),即靜態(tài)分量Fsta:
(16)
其中,的所有元素均為。
同樣,可通過識(shí)別動(dòng)態(tài)分量Fdyn:
(17)
(18)
式中 αdyn為動(dòng)態(tài)分量Fdyn對(duì)應(yīng)的稀疏向量。
動(dòng)態(tài)分量Fdyn由下式得到:
(19)
其中,的所有元素均等于αdyn中的第一個(gè)元素。
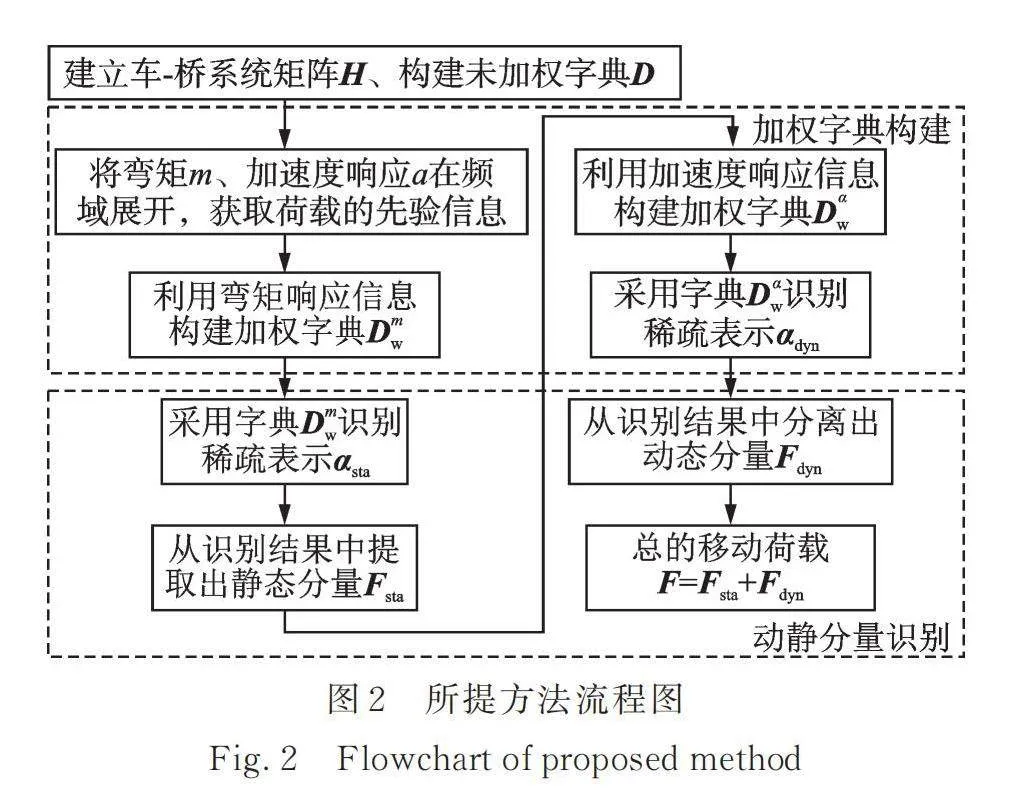
綜上所述,所提方法主要求解兩個(gè)方程,即式(14)及(17)。求出靜態(tài)分量Fsta和動(dòng)態(tài)分量Fdyn后,相加即可得到移動(dòng)荷載F。所提方法將原有字典進(jìn)行改進(jìn),用加權(quán)字典代替原來的固定字典,同時(shí)考慮了動(dòng)態(tài)分量與靜態(tài)分量之間的差異,針對(duì)性地分別進(jìn)行求解,從而提高了荷載識(shí)別精度與噪聲魯棒性,且有望提高正則化方法在實(shí)際工程中面對(duì)復(fù)雜環(huán)境噪聲干擾時(shí)的識(shí)別效果。圖2為所提方法流程圖。
2 數(shù)值仿真
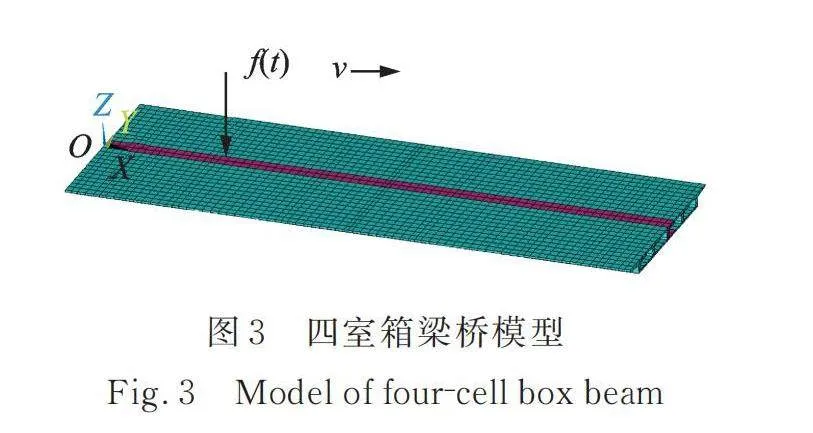
2.1 四室箱梁模型
為了驗(yàn)證所提方法的有效性,考慮一個(gè)四室箱梁橋模型,如圖3所示。該橋全長(zhǎng)L=70 m,兩端為簡(jiǎn)支約束,抗彎剛度EI=9.7931×1012 N·m2,線密度=4145 kg/m。
沿橋面中心線作用單軸移動(dòng)荷載f(t),速度v=14 m/s。移動(dòng)荷載的時(shí)程曲線如下所示:
(20)
橋梁有限元模型(FEM)由商用有限元軟件ANSYS19.0建立。考慮到運(yùn)算成本和模型復(fù)雜度,采用SOLID185單元進(jìn)行建模。橋梁的前三階固有頻率分別為1.37,5.384和11.82 Hz。
測(cè)量響應(yīng)不可避免地會(huì)受到噪聲干擾,為了模擬實(shí)測(cè)響應(yīng)中的噪聲成分,采用如下加噪公式[20]:
(21)
式中 bn和b分別表示加噪與不加噪的橋梁響應(yīng);表示噪聲水平;rand表示標(biāo)準(zhǔn)正態(tài)分布列向量。
將真實(shí)移動(dòng)荷載與識(shí)別移動(dòng)荷載的相對(duì)百分比誤差(RPE)作為評(píng)價(jià)指標(biāo)。同樣地,識(shí)別靜態(tài)和動(dòng)態(tài)分量與真實(shí)值的RPE也作為評(píng)價(jià)指標(biāo),分別定義如下:
(22)
(23)
(24)
式中 表示L2范數(shù);,和分別表示真實(shí)的靜態(tài)分量、動(dòng)態(tài)分量和總荷載;,和分別表示識(shí)別的靜態(tài)分量、動(dòng)態(tài)分量和總荷載。
2.2 不同方法對(duì)比
為了驗(yàn)證所提的加權(quán)字典相比固定字典具有更好的荷載識(shí)別精度,將所提方法與L1正則化和L2正則化進(jìn)行對(duì)比研究。在正問題部分,荷載的計(jì)算時(shí)間步長(zhǎng)為0.002 s。出于計(jì)算效率的考慮,對(duì)計(jì)算得到的響應(yīng)數(shù)據(jù)降采樣至50 Hz。選取橋梁的前三階振動(dòng)信息進(jìn)行荷載識(shí)別。其中,50 Hz的響應(yīng)采樣頻率已能夠滿足計(jì)算要求。響應(yīng)采樣時(shí)間為5 s,這也是移動(dòng)荷載在橋上行駛的總時(shí)間。在確定了響應(yīng)的采樣時(shí)間及采樣頻率后,便可得到響應(yīng)數(shù)據(jù)的頻率分辨率Δf為0.2 Hz。將響應(yīng)數(shù)據(jù)在頻域展開,每間隔四個(gè)數(shù)據(jù)點(diǎn)進(jìn)行重采樣,可得到頻率分辨率為1 Hz的向量B。根據(jù)所選的荷載,感興趣的頻率fr選為25 Hz即可滿足計(jì)算要求。測(cè)量響應(yīng)組合為m &a。其中,“”和“”分別表示測(cè)點(diǎn)位置位于橋梁的跨和跨,“a”和“m”分別表示加速度和彎矩響應(yīng)。
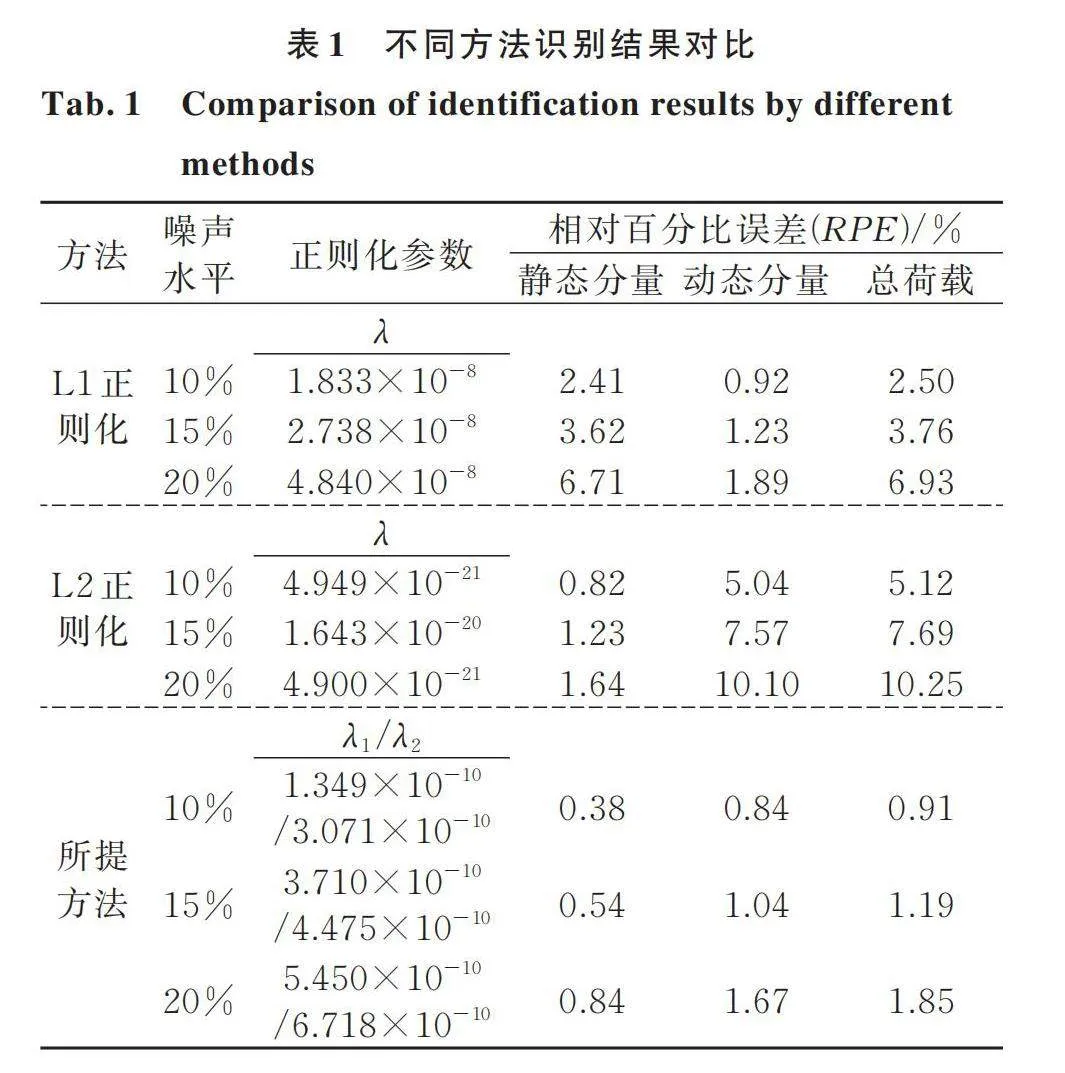
三種方法識(shí)別得到的移動(dòng)荷載結(jié)果如表1所示。在總荷載識(shí)別方面,所提方法的識(shí)別精度和噪聲魯棒性遠(yuǎn)優(yōu)于其他兩種方法。在三種噪聲水平下,所提方法對(duì)總荷載的RPE值分別為0.91%,1.19%和1.85%,相較L1正則化的2.50%,3.76%和6.93%,均有明顯提升。L2正則化由于不能產(chǎn)生稀疏解,識(shí)別結(jié)果相對(duì)最差。
對(duì)于動(dòng)靜荷載分量的識(shí)別,所提方法同樣表現(xiàn)出更好的識(shí)別效果。雖然L1正則化和L2正則化分別對(duì)動(dòng)態(tài)和靜態(tài)分量具有良好的識(shí)別性能,但從表1中可以看出,所提方法的識(shí)別精度相較于L1正則化和L2正則化有著進(jìn)一步提升。即使在20%高噪聲水平下,所提方法的動(dòng)、靜荷載RPE也均在1.7%以下。同時(shí)可以發(fā)現(xiàn),在不同噪聲水平下,所提方法中的正則化參數(shù)λ2總大于λ1。這表明在識(shí)別動(dòng)態(tài)分量時(shí),需要更大的正則化參數(shù)來抑制高頻噪聲,而傳統(tǒng)的L1和L2正則化未考慮這種差異。
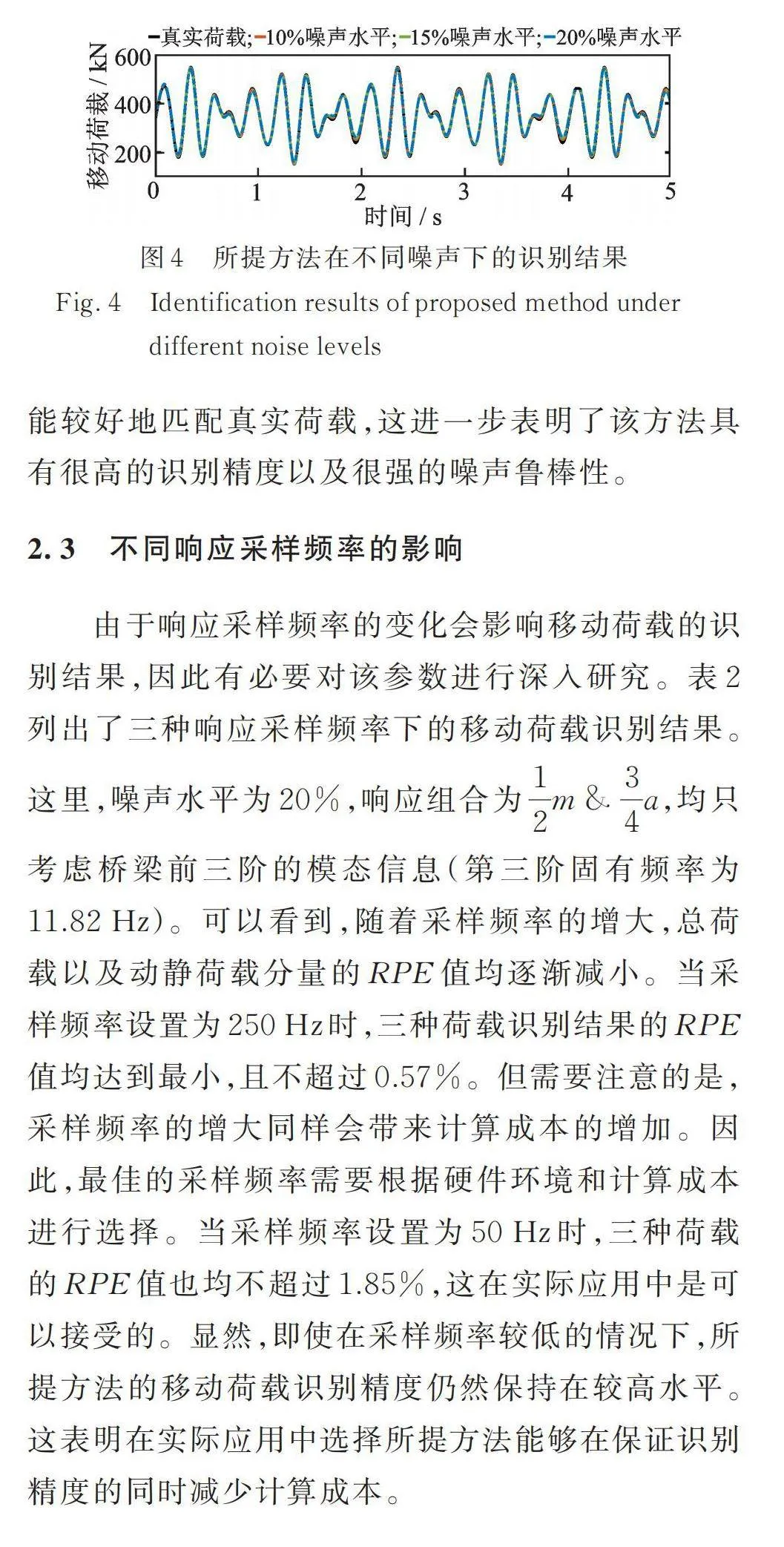
圖4為所提方法在三種噪聲水平下的荷載識(shí)別結(jié)果。可以看出,無論是靜態(tài)分量還是動(dòng)態(tài)分量,均能較好地匹配真實(shí)荷載,這進(jìn)一步表明了該方法具有很高的識(shí)別精度以及很強(qiáng)的噪聲魯棒性。
2.3 不同響應(yīng)采樣頻率的影響
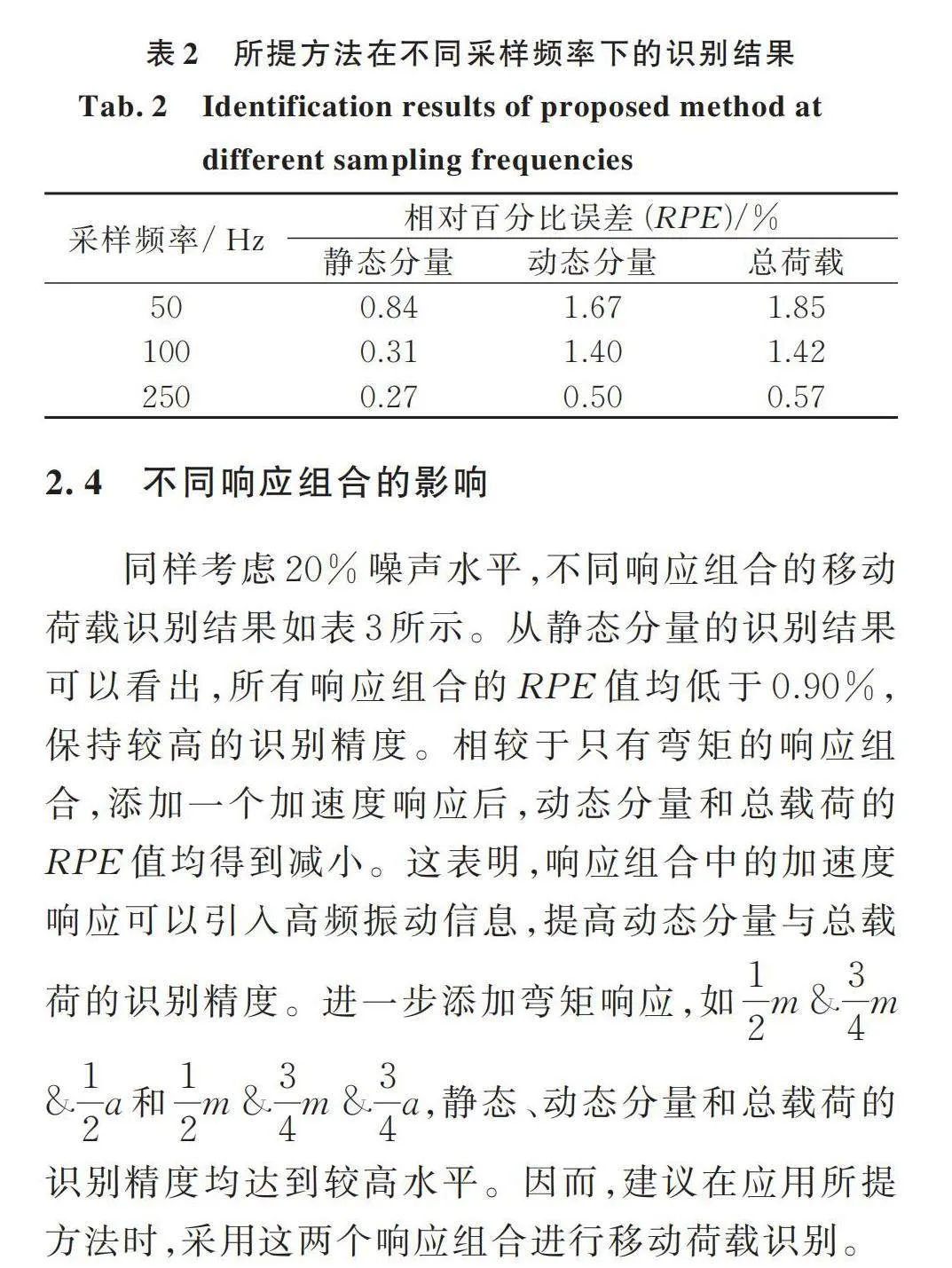
由于響應(yīng)采樣頻率的變化會(huì)影響移動(dòng)荷載的識(shí)別結(jié)果,因此有必要對(duì)該參數(shù)進(jìn)行深入研究。表2列出了三種響應(yīng)采樣頻率下的移動(dòng)荷載識(shí)別結(jié)果。這里,噪聲水平為20%,響應(yīng)組合為m & a,均只考慮橋梁前三階的模態(tài)信息(第三階固有頻率為11.82 Hz)。可以看到,隨著采樣頻率的增大,總荷載以及動(dòng)靜荷載分量的RPE值均逐漸減小。當(dāng)采樣頻率設(shè)置為250 Hz時(shí),三種荷載識(shí)別結(jié)果的RPE值均達(dá)到最小,且不超過0.57%。但需要注意的是,采樣頻率的增大同樣會(huì)帶來計(jì)算成本的增加。因此,最佳的采樣頻率需要根據(jù)硬件環(huán)境和計(jì)算成本進(jìn)行選擇。當(dāng)采樣頻率設(shè)置為50 Hz時(shí),三種荷載的RPE值也均不超過1.85%,這在實(shí)際應(yīng)用中是可以接受的。顯然,即使在采樣頻率較低的情況下,所提方法的移動(dòng)荷載識(shí)別精度仍然保持在較高水平。這表明在實(shí)際應(yīng)用中選擇所提方法能夠在保證識(shí)別精度的同時(shí)減少計(jì)算成本。
2500.270.500.57
2.4 不同響應(yīng)組合的影響
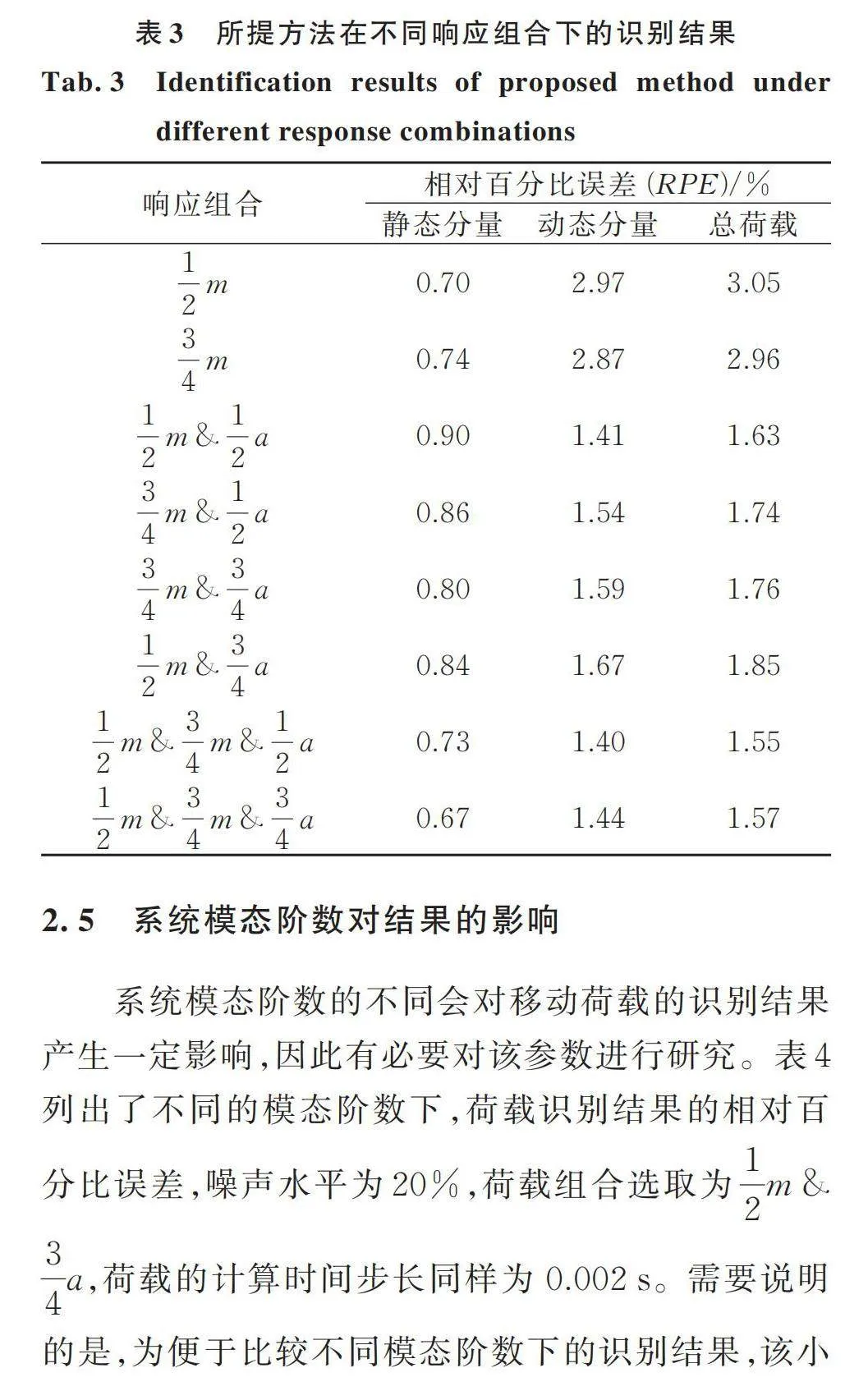
同樣考慮20%噪聲水平,不同響應(yīng)組合的移動(dòng)荷載識(shí)別結(jié)果如表3所示。從靜態(tài)分量的識(shí)別結(jié)果可以看出,所有響應(yīng)組合的RPE值均低于0.90%,保持較高的識(shí)別精度。相較于只有彎矩的響應(yīng)組合,添加一個(gè)加速度響應(yīng)后,動(dòng)態(tài)分量和總載荷的RPE值均得到減小。這表明,響應(yīng)組合中的加速度響應(yīng)可以引入高頻振動(dòng)信息,提高動(dòng)態(tài)分量與總載荷的識(shí)別精度。進(jìn)一步添加彎矩響應(yīng),如m &m &a和m &m &a,靜態(tài)、動(dòng)態(tài)分量和總載荷的識(shí)別精度均達(dá)到較高水平。因而,建議在應(yīng)用所提方法時(shí),采用這兩個(gè)響應(yīng)組合進(jìn)行移動(dòng)荷載識(shí)別。
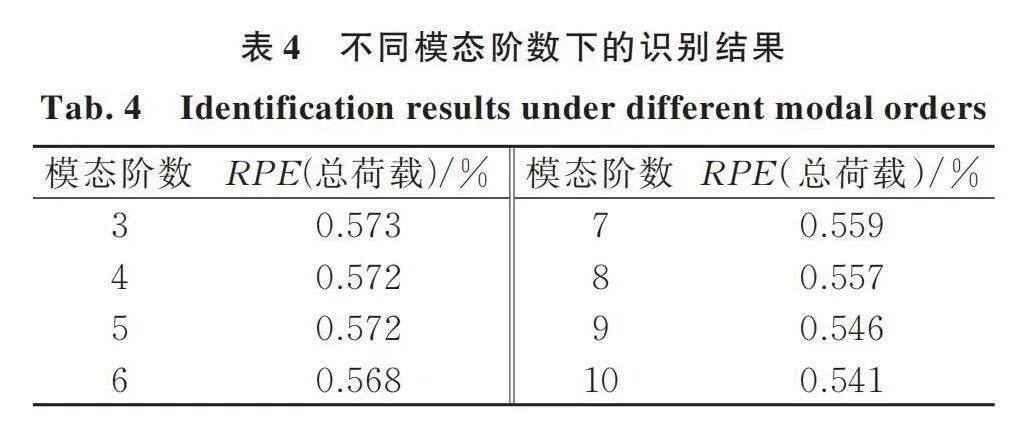
2.5 系統(tǒng)模態(tài)階數(shù)對(duì)結(jié)果的影響
系統(tǒng)模態(tài)階數(shù)的不同會(huì)對(duì)移動(dòng)荷載的識(shí)別結(jié)果產(chǎn)生一定影響,因此有必要對(duì)該參數(shù)進(jìn)行研究。表4列出了不同的模態(tài)階數(shù)下,荷載識(shí)別結(jié)果的相對(duì)百分比誤差,噪聲水平為20%,荷載組合選取為m & a,荷載的計(jì)算時(shí)間步長(zhǎng)同樣為 0.002 s。需要說明的是,為便于比較不同模態(tài)階數(shù)下的識(shí)別結(jié)果,該小節(jié)將響應(yīng)數(shù)據(jù)均降采樣至250 Hz,以包含橋梁前 10 階(第10階頻率為116.72 Hz)的振動(dòng)信息,且在降采樣過程中未采用數(shù)字濾波。從表4中可以看到,當(dāng)模態(tài)階數(shù)增加時(shí),識(shí)別精度會(huì)有一定程度的提高,但精度提升幅度較小。而隨著模態(tài)階數(shù)的增加,計(jì)算量也會(huì)隨之增加,所以在選擇系統(tǒng)模態(tài)階數(shù)時(shí),為了平衡精度與計(jì)算效率,取前三階已能滿足要求。
3 實(shí)驗(yàn)驗(yàn)證
3.1 實(shí)驗(yàn)設(shè)置
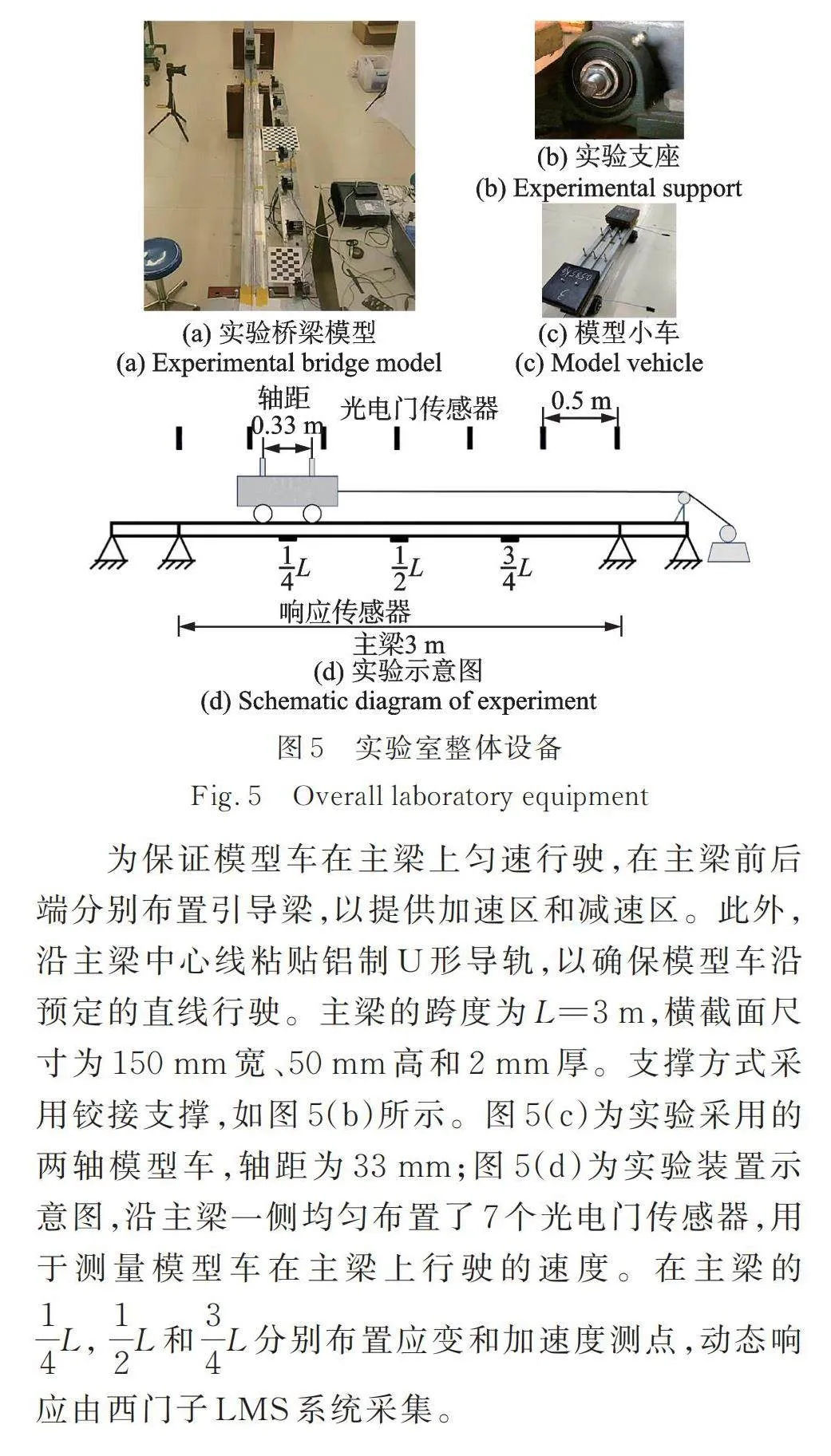
在實(shí)驗(yàn)室搭建了空心方管梁跑車實(shí)驗(yàn)平臺(tái),如圖5(a)所示。
為保證模型車在主梁上勻速行駛,在主梁前后端分別布置引導(dǎo)梁,以提供加速區(qū)和減速區(qū)。此外,沿主梁中心線粘貼鋁制U形導(dǎo)軌,以確保模型車沿預(yù)定的直線行駛。主梁的跨度為L(zhǎng)=3 m,橫截面尺寸為150 mm寬、50 mm高和2 mm厚。支撐方式采用鉸接支撐,如圖5(b)所示。圖5(c)為實(shí)驗(yàn)采用的兩軸模型車,軸距為33 mm;圖5(d)為實(shí)驗(yàn)裝置示意圖,沿主梁一側(cè)均勻布置了7個(gè)光電門傳感器,用于測(cè)量模型車在主梁上行駛的速度。在主梁的L,L和L分別布置應(yīng)變和加速度測(cè)點(diǎn),動(dòng)態(tài)響應(yīng)由西門子LMS系統(tǒng)采集。
3.2 FEM修正
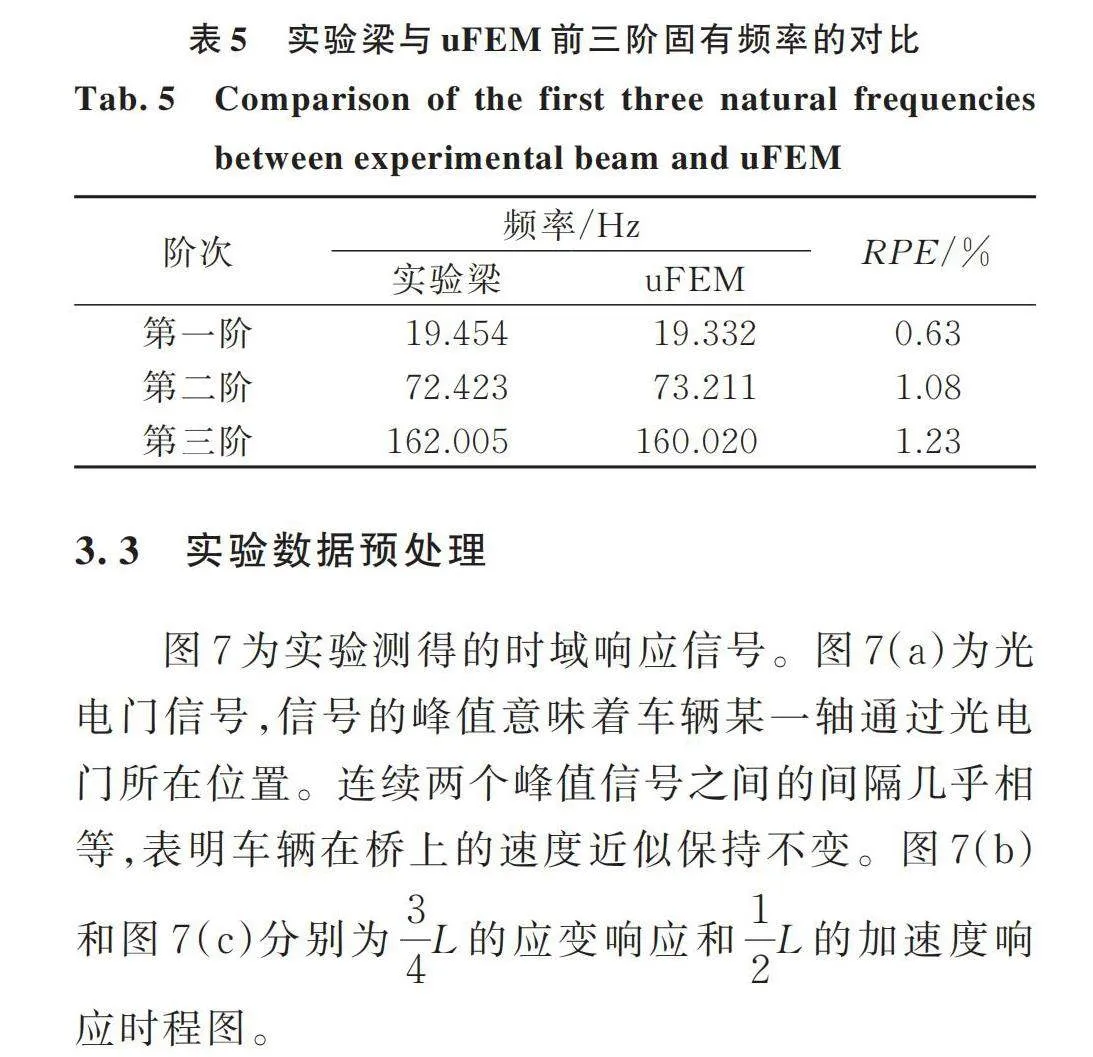
實(shí)驗(yàn)梁FEM的單元?jiǎng)澐旨皟啥思s束如圖6所示。由于移動(dòng)荷載與實(shí)測(cè)響應(yīng)之間的系統(tǒng)矩陣,是通過有限元法建立起來的,所以有限元模型與實(shí)驗(yàn)梁的動(dòng)態(tài)特性吻合程度越高,移動(dòng)荷載與實(shí)測(cè)響應(yīng)之間的系統(tǒng)矩陣映射關(guān)系就越準(zhǔn)確,越有利于提高荷載識(shí)別的準(zhǔn)確性。為了使FEM更貼近實(shí)驗(yàn)梁的特性,通過靈敏度方法對(duì)FEM進(jìn)行修正。修正的參數(shù)包含線密度、抗彎剛度和支座剛度。修正后有限元模型(uFEM)的線密度和抗彎剛度分別為6.67 kg/m和7.3607×104 N?m2。豎向彈簧的剛度系數(shù)為kh=6.4125×1011 N/m,扭轉(zhuǎn)彈簧的剛度系數(shù)為kt=1.6230×105N·m/rad,兩端的彈簧參數(shù)保持相同。表5為uFEM和實(shí)驗(yàn)梁的前三階固有頻率對(duì)比,可以看到,uFEM和實(shí)驗(yàn)梁的前三階頻率吻合較好,最大的RPE為1.23%,表明uFEM是適用的。
3.3 實(shí)驗(yàn)數(shù)據(jù)預(yù)處理
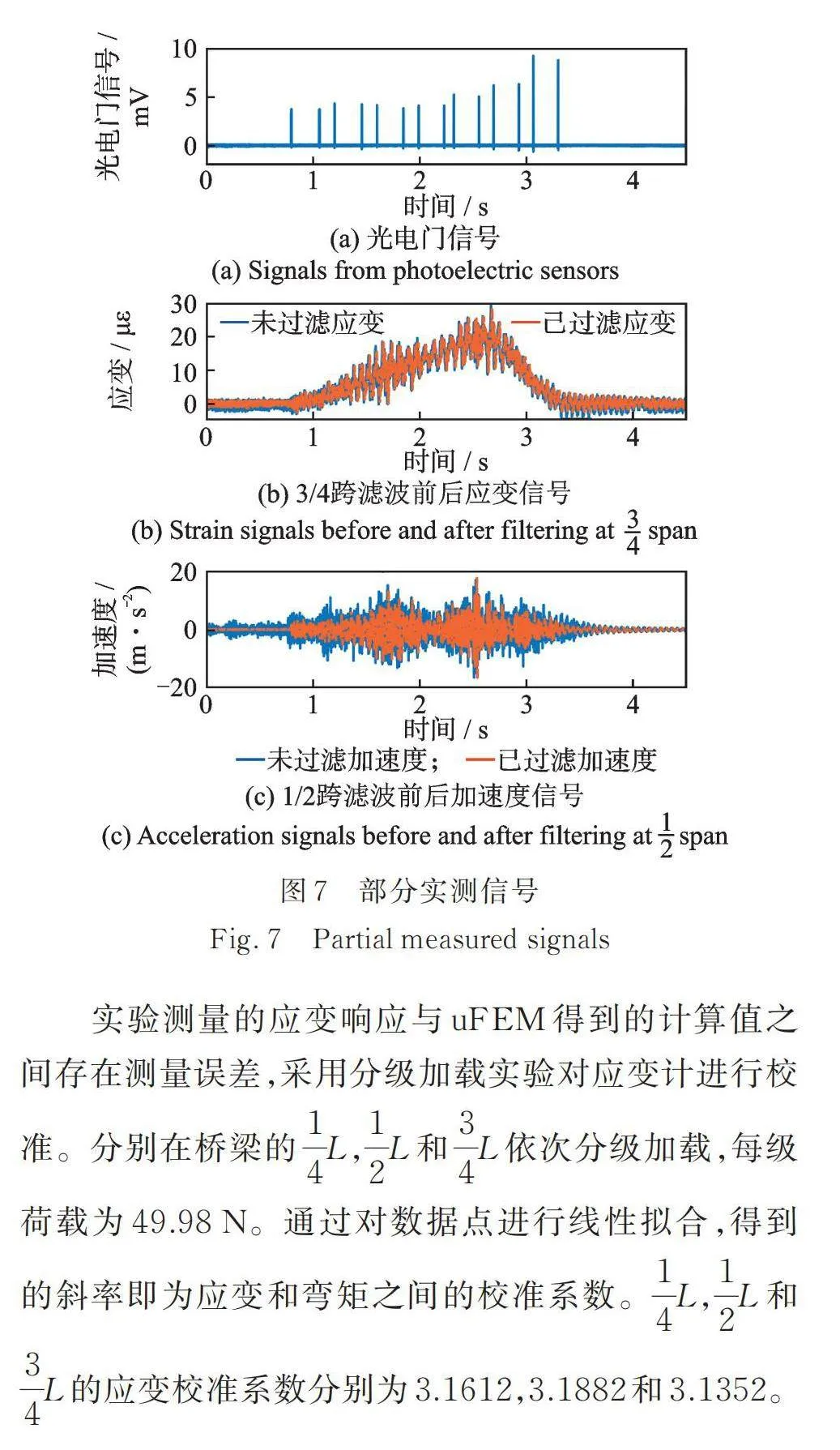
圖7為實(shí)驗(yàn)測(cè)得的時(shí)域響應(yīng)信號(hào)。圖7(a)為光電門信號(hào),信號(hào)的峰值意味著車輛某一軸通過光電門所在位置。連續(xù)兩個(gè)峰值信號(hào)之間的間隔幾乎相等,表明車輛在橋上的速度近似保持不變。圖7(b)和圖7(c)分別為L(zhǎng)的應(yīng)變響應(yīng)和L的加速度響應(yīng)時(shí)程圖。
同時(shí)考慮到響應(yīng)數(shù)據(jù)的頻率分辨率以及實(shí)驗(yàn)梁的第三階固有頻率為162.01 Hz,根據(jù)香農(nóng)采樣定理以及頻率分辨率的定義,實(shí)測(cè)響應(yīng)的采樣頻率設(shè)置為512 Hz,可以滿足實(shí)驗(yàn)要求。
由于采集的響應(yīng)會(huì)受到環(huán)境噪聲干擾,采用Butterworth低通濾波器對(duì)應(yīng)變與加速度響應(yīng)進(jìn)行濾波。由于實(shí)驗(yàn)梁的第三階固有頻率為162.01 Hz,濾波器的截止頻率選為165 Hz。濾波后的應(yīng)變與加速度響應(yīng)分別見圖7(b)和(c)。
實(shí)驗(yàn)測(cè)量的應(yīng)變響應(yīng)與uFEM得到的計(jì)算值之間存在測(cè)量誤差,采用分級(jí)加載實(shí)驗(yàn)對(duì)應(yīng)變計(jì)進(jìn)行校準(zhǔn)。分別在橋梁的L,L和L依次分級(jí)加載,每級(jí)荷載為49.98 N。通過對(duì)數(shù)據(jù)點(diǎn)進(jìn)行線性擬合,得到的斜率即為應(yīng)變和彎矩之間的校準(zhǔn)系數(shù)。L,L和L的應(yīng)變校準(zhǔn)系數(shù)分別為3.1612,3.1882和3.1352。
3.4 移動(dòng)荷載識(shí)別結(jié)果與分析
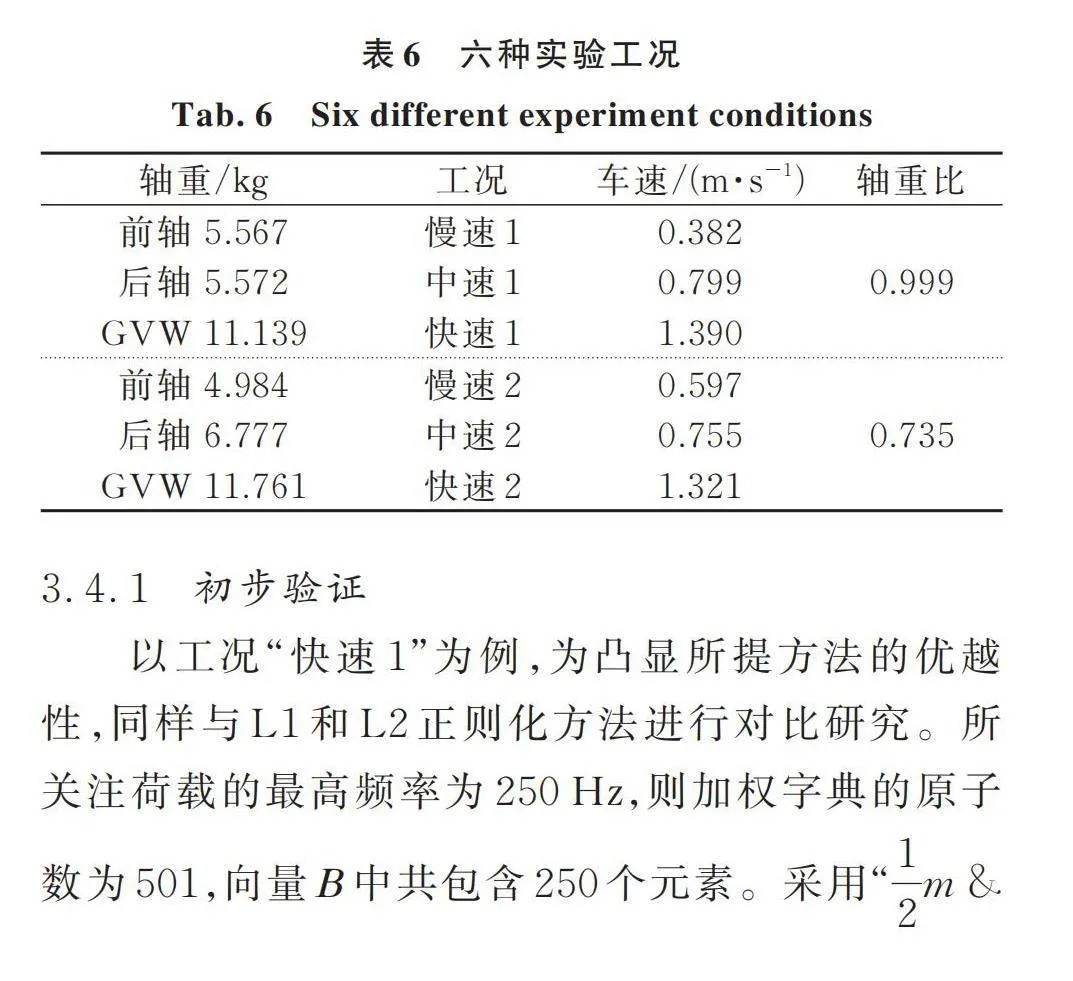
考慮不同的車速以及軸重比,設(shè)置了6種工況,如表6所示。模型車的軸重比為前軸與后軸重量之比。車輛總重(GVW)表示車輛前后軸重量的總和。車輛速度考慮了慢速、中速和快速三種情況。
3.4.1 初步驗(yàn)證
以工況“快速1”為例,為凸顯所提方法的優(yōu)越性,同樣與L1和L2正則化方法進(jìn)行對(duì)比研究。所關(guān)注荷載的最高頻率為250 Hz,則加權(quán)字典的原子數(shù)為501,向量B中共包含250個(gè)元素。采用“m &m &a”響應(yīng)組合識(shí)別移動(dòng)荷載。三種方法正則化參數(shù)均通過BIC準(zhǔn)則選取。
由于實(shí)驗(yàn)設(shè)備限制,很難直接測(cè)量移動(dòng)車載的動(dòng)態(tài)分量。因此,將模型車識(shí)別軸重與測(cè)量軸重的RPE作為評(píng)價(jià)指標(biāo),定義為:
(25)
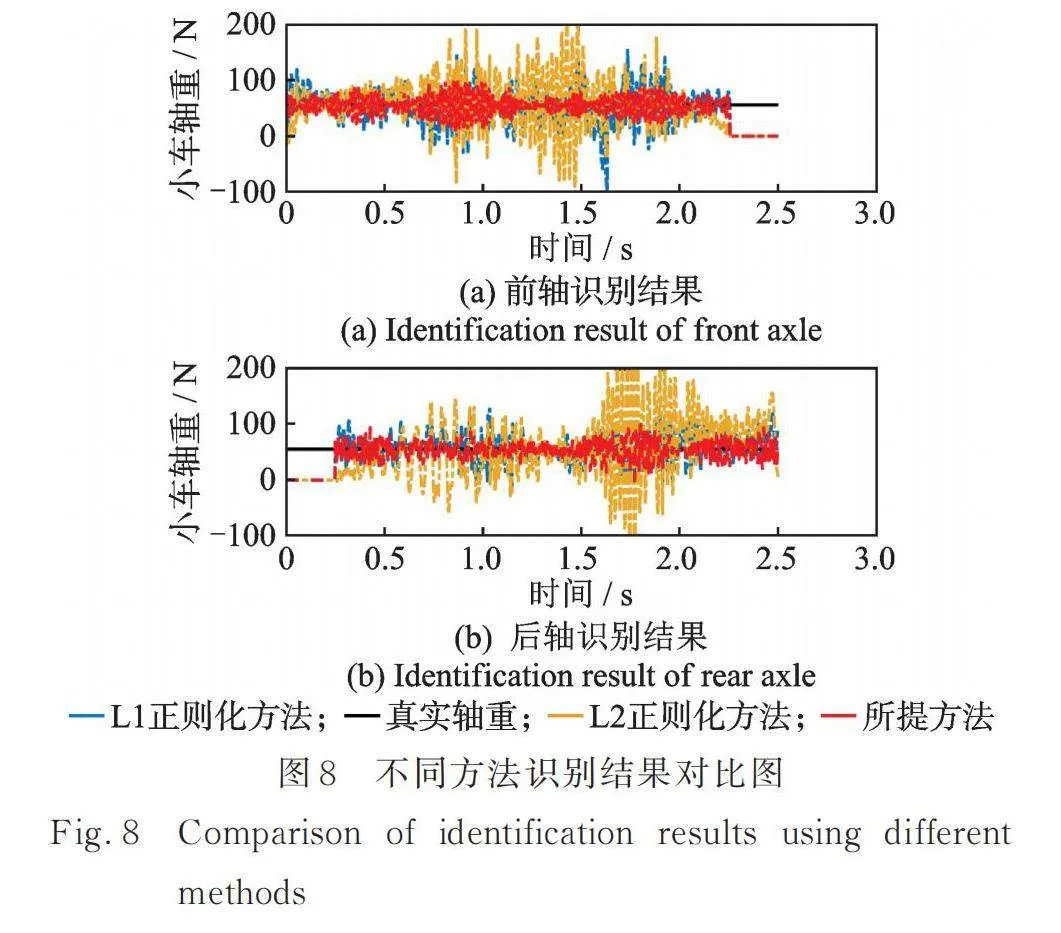
式中 和分別為模型車軸重的實(shí)測(cè)和識(shí)別結(jié)果;|?|表示L1范數(shù)。圖8為所提方法與現(xiàn)有兩種方法的移動(dòng)車載識(shí)別結(jié)果比較。
在圖8中,黑色水平線表示模型車的實(shí)測(cè)軸重。可以看出,當(dāng)采用所提方法時(shí),識(shí)別的移動(dòng)車載圍繞真實(shí)軸重波動(dòng)最小,表明所提方法有效地抑制了高頻噪聲成分。其主要原因在于該方法將結(jié)構(gòu)響應(yīng)中的頻率成分作為先驗(yàn)信息,并用于構(gòu)建加權(quán)字典,可以更好地抑制噪聲的影響。因此,與其他兩種方法相比,所提方法表現(xiàn)出更強(qiáng)的噪聲魯棒性。
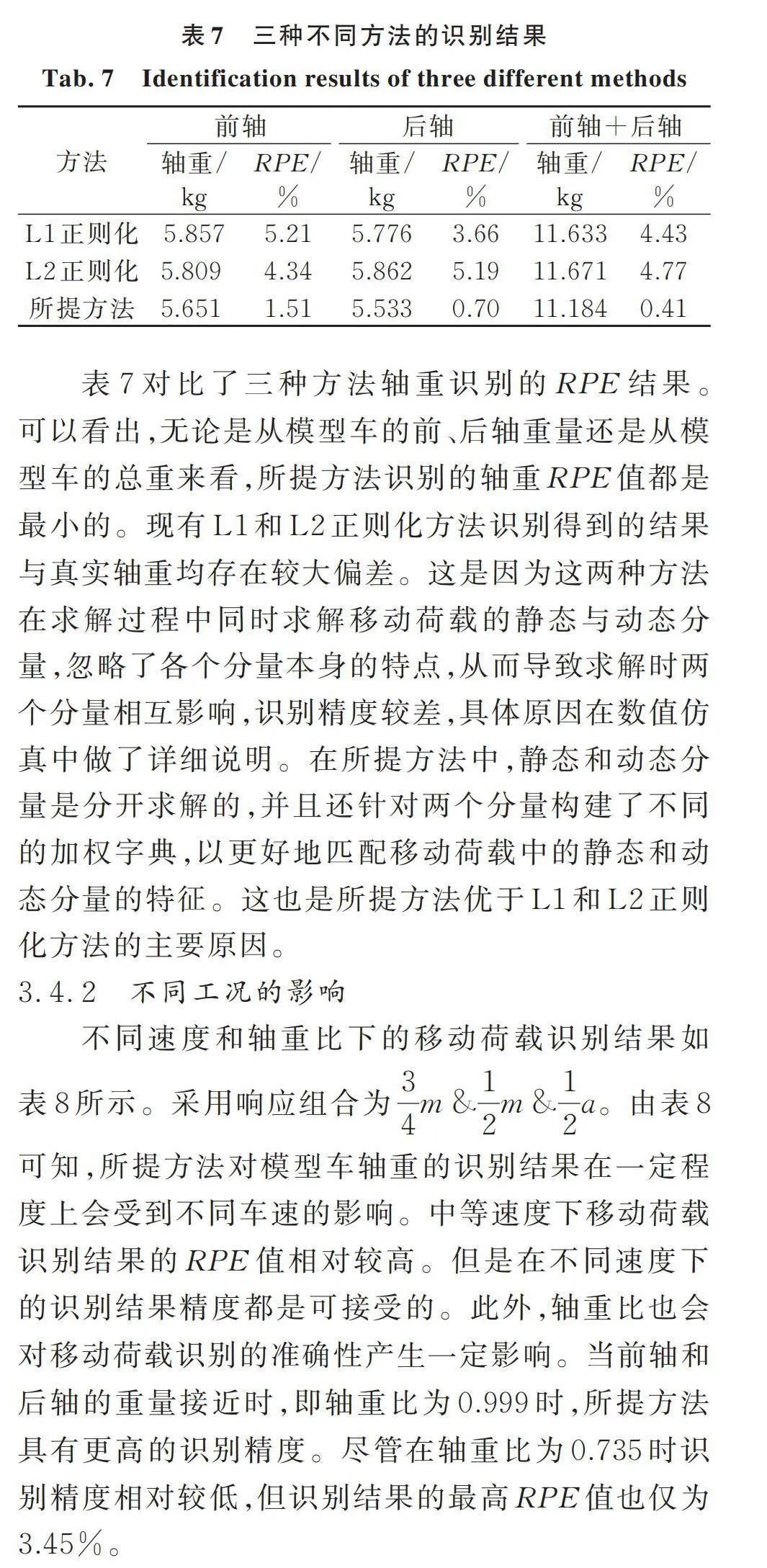
表7對(duì)比了三種方法軸重識(shí)別的RPE結(jié)果。可以看出,無論是從模型車的前、后軸重量還是從模型車的總重來看,所提方法識(shí)別的軸重RPE值都是最小的。現(xiàn)有L1和L2正則化方法識(shí)別得到的結(jié)果與真實(shí)軸重均存在較大偏差。這是因?yàn)檫@兩種方法在求解過程中同時(shí)求解移動(dòng)荷載的靜態(tài)與動(dòng)態(tài)分量,忽略了各個(gè)分量本身的特點(diǎn),從而導(dǎo)致求解時(shí)兩個(gè)分量相互影響,識(shí)別精度較差,具體原因在數(shù)值仿真中做了詳細(xì)說明。在所提方法中,靜態(tài)和動(dòng)態(tài)分量是分開求解的,并且還針對(duì)兩個(gè)分量構(gòu)建了不同的加權(quán)字典,以更好地匹配移動(dòng)荷載中的靜態(tài)和動(dòng)態(tài)分量的特征。這也是所提方法優(yōu)于L1和L2正則化方法的主要原因。
3.4.2 不同工況的影響
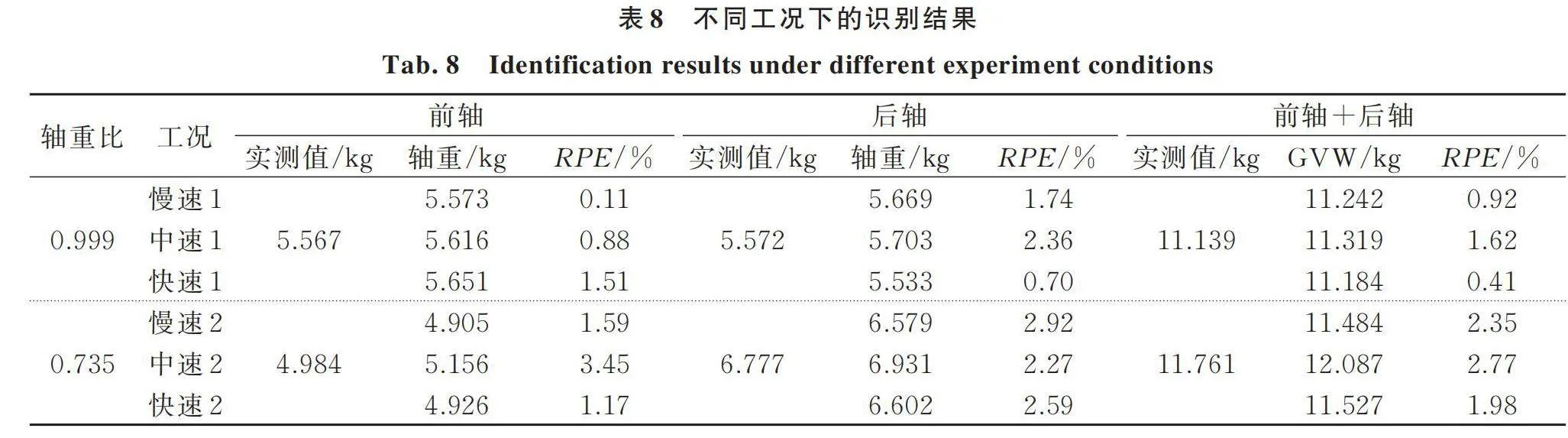
不同速度和軸重比下的移動(dòng)荷載識(shí)別結(jié)果如表8所示。采用響應(yīng)組合為m &m &a。由表8可知,所提方法對(duì)模型車軸重的識(shí)別結(jié)果在一定程度上會(huì)受到不同車速的影響。中等速度下移動(dòng)荷載識(shí)別結(jié)果的RPE值相對(duì)較高。但是在不同速度下的識(shí)別結(jié)果精度都是可接受的。此外,軸重比也會(huì)對(duì)移動(dòng)荷載識(shí)別的準(zhǔn)確性產(chǎn)生一定影響。當(dāng)前軸和后軸的重量接近時(shí),即軸重比為0.999時(shí),所提方法具有更高的識(shí)別精度。盡管在軸重比為0.735時(shí)識(shí)別精度相對(duì)較低,但識(shí)別結(jié)果的最高RPE值也僅為3.45%。
總而言之,表8中列出的識(shí)別結(jié)果RPE值均保持在較低水平。這意味著所提方法的識(shí)別結(jié)果穩(wěn)定且準(zhǔn)確。
3.4.3 不同響應(yīng)組合的影響
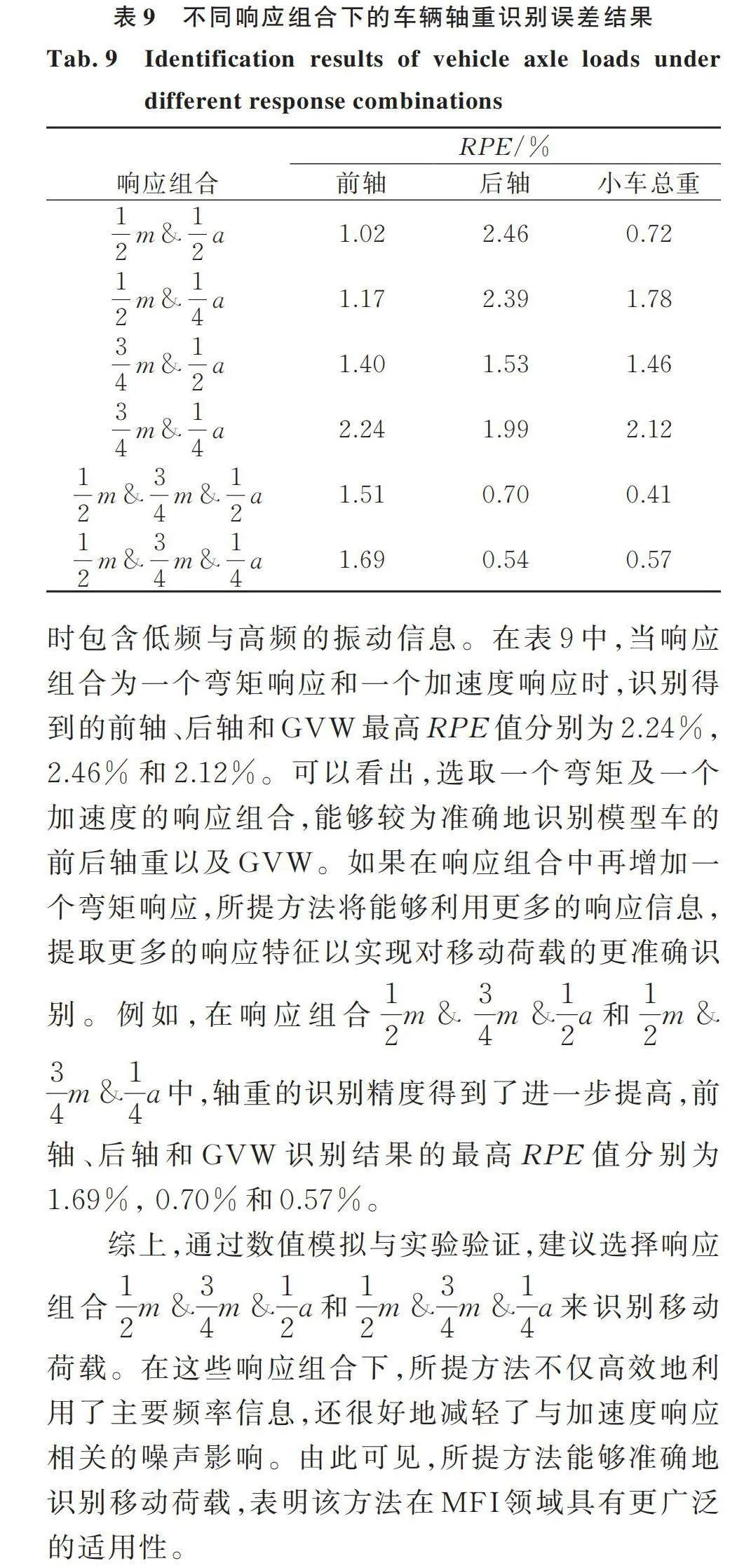
選取工況“快速1”,軸重比0.999為例,考慮不同響應(yīng)組合對(duì)所提方法的影響,如表9所示。
由于設(shè)備限制,加速度計(jì)無法采集到零頻的振動(dòng)信息,所以單獨(dú)使用加速度響應(yīng)識(shí)別移動(dòng)荷載會(huì)嚴(yán)重影響識(shí)別精度。因此,將同時(shí)使用彎矩響應(yīng)和加速度響應(yīng)來識(shí)別移動(dòng)荷載,這表示響應(yīng)組合中同時(shí)包含低頻與高頻的振動(dòng)信息。在表9中,當(dāng)響應(yīng)組合為一個(gè)彎矩響應(yīng)和一個(gè)加速度響應(yīng)時(shí),識(shí)別得到的前軸、后軸和GVW最高RPE值分別為2.24%,2.46%和2.12%。可以看出,選取一個(gè)彎矩及一個(gè)加速度的響應(yīng)組合,能夠較為準(zhǔn)確地識(shí)別模型車的前后軸重以及GVW。如果在響應(yīng)組合中再增加一個(gè)彎矩響應(yīng),所提方法將能夠利用更多的響應(yīng)信息,提取更多的響應(yīng)特征以實(shí)現(xiàn)對(duì)移動(dòng)荷載的更準(zhǔn)確識(shí)別。例如,在響應(yīng)組合m & m &a和m &m &a中,軸重的識(shí)別精度得到了進(jìn)一步提高,前軸、后軸和GVW識(shí)別結(jié)果的最高RPE值分別為1.69%,0.70%和0.57%。
綜上,通過數(shù)值模擬與實(shí)驗(yàn)驗(yàn)證,建議選擇響應(yīng)組合m &m &a和m &m &a來識(shí)別移動(dòng)荷載。在這些響應(yīng)組合下,所提方法不僅高效地利用了主要頻率信息,還很好地減輕了與加速度響應(yīng)相關(guān)的噪聲影響。由此可見,所提方法能夠準(zhǔn)確地識(shí)別移動(dòng)荷載,表明該方法在MFI領(lǐng)域具有更廣泛的適用性。
4 結(jié) 論
針對(duì)稀疏正則化方法存在的問題,提出了一種融合響應(yīng)先驗(yàn)信息和加權(quán)字典的移動(dòng)荷載識(shí)別方法。該方法首先利用結(jié)構(gòu)響應(yīng)的頻率特征構(gòu)建與移動(dòng)荷載相匹配的加權(quán)字典。然后采用該加權(quán)字典分別識(shí)別移動(dòng)荷載中的靜態(tài)和動(dòng)態(tài)分量,最終將靜態(tài)和動(dòng)態(tài)分量相加以獲得完整的荷載信息。通過數(shù)值模擬和實(shí)驗(yàn)驗(yàn)證,得出以下結(jié)論:
(1)利用結(jié)構(gòu)響應(yīng)的先驗(yàn)信息對(duì)字典加權(quán),能夠有效地識(shí)別靜態(tài)和動(dòng)態(tài)分量。相較于其他正則化方法,所提方法展現(xiàn)出更高的識(shí)別精度和更強(qiáng)的噪聲魯棒性。
(2)在不同的實(shí)驗(yàn)工況下,無論是車軸重量還是整車總重量,識(shí)別精度均在可接受范圍內(nèi)。由表8可知,前、后軸重量和GVW的最高RPE值分別為3.45%,2.92%和2.77%,說明在使用實(shí)測(cè)數(shù)據(jù)的情況下,本文方法仍能提供較高的MFI精度,有望應(yīng)用于實(shí)際工程。
(3)適當(dāng)?shù)捻憫?yīng)組合能更有效提高識(shí)別精度。從表3和9可知,由兩個(gè)彎矩和一個(gè)加速度響應(yīng)組成的響應(yīng)組合是這些響應(yīng)組合中最優(yōu)的選擇。
(4)在實(shí)際應(yīng)用中,若有其他車輛進(jìn)入造成干擾,便會(huì)涉及到多車情況下的移動(dòng)荷載識(shí)別。本文主要關(guān)注單車問題,針對(duì)多車移動(dòng)荷載識(shí)別問題,將在未來另文進(jìn)行研究。
參考文獻(xiàn):
[1]Moses F. Weigh-in-motion system using instrumented bridges[J]. Transportation Engineering Journal of ASCE,1979,105(3): 233-249.
[2]Feng D M,Sun H,F(xiàn)eng M Q. Simultaneous identification of bridge structural parameters and vehicle loads[J]. Computers & Structures,2015,157: 76-88.
[3]Hu Z Y,Xiang Z H. Noise-enhanced effect in moving dynamic force identification[J]. Journal of Sound and Vibration,2023,557: 117742.
[4]饒勇平,張富博,雷鷹. 基于結(jié)構(gòu)隨機(jī)場(chǎng)的橋梁移動(dòng)荷載統(tǒng)計(jì)矩識(shí)別[J]. 振動(dòng)工程學(xué)報(bào),2023,36(1): 62-69.
Rao Yongping,Zhang Fubo,Lei Ying. Identification of statistical moments of moving loads on bridge structures with spatial random fields[J]. Journal of Vibration Engineering,2023,36(1): 62-69.
[5]Law S S,Chan T H T,Zeng Q H. Moving force identification: a time domain method[J]. Journal of Sound and Vibration,1997,201(1): 1-22.
[6]Liao M H,Liang S,Luo R,et al. The moving load identification method on asphalt roads based on the BP neural network and FBG sensor monitoring[J]. Construction & Building Materials,2023,378: 131216.
[7]Hou Z L,Yu L,Liang Y,et al. Integrating L1 and weighted L2 regularization for moving force identification from combined response measurements[J]. Measurement,2024,228: 114337.
[8]茅建校,龐振浩,王浩,等. 橋梁車輛荷載識(shí)別的貝葉斯方法研究[J]. 振動(dòng)工程學(xué)報(bào),2023,36(2): 467-476.
Mao Jianxiao,Pang Zhenhao,Wang Hao,et al. Research on Bayesian method for identifying the vehicle loads on the bridge[J]. Journal of Vibration Engineering,2023,36(2): 467-476
[9]Li M Q,Wang L J,Luo C S,et al. A new improved fractional Tikhonov regularization method for moving force identification[J]. Structures,2024,60: 105840.
[10]陳震,余嶺. 基于截?cái)郍SVD方法的橋梁移動(dòng)荷載識(shí)別[J]. 振動(dòng)與沖擊,2014,33(10): 97-100.
Chen Zhen,Yu Ling. Identification of dynamic axle loads on a bridge based on truncated generalized singular value decomposition[J]. Journal of Vibration Engineering,2014,33(10): 97-100.
[11]陳震,王震,余嶺,等. 預(yù)處理最小二乘QR分解法識(shí)別橋梁移動(dòng)荷載的優(yōu)化分析及試驗(yàn)研究[J]. 振動(dòng)工程學(xué)報(bào),2018,31(4): 545-552.
Chen Zhen,Wang Zhen,Yu Ling,et al. Optimization analysis and experimental study of preconditioned least square QR-factorization for moving force identification[J]. Journal of Vibration Engineering,2018,31(4): 545-52.
[12]Huang C,Ji H L,Qiu J H,et al. TwIST sparse regularization method using cubic B-spline dual scaling functions for impact force identification[J]. Mechanical System & Signal Processing,2022,167: 108451.
[13]Liu J J,Qiao B J,Wang Y N,et al. Group sparsity extension of “Non-convex sparse regularization via convex optimization for impact force identification”[J]. Mechanical System & Signal Processing,2023,201: 110661.
[14]Liang Y,Hou Z L,Yu L. An improved block orthogonal matching pursuit for moving force identification using block-sparse compressed sensing[J]. Measurement,2023,222: 113632.
[15]Qiao B J,Chen X F,Luo X J,et al. A novel method for force identification based on the discrete cosine transform[J]. Journal of Vibration Acoustics,2015,137(5): 051012.
[16]Qiao B J,Chen X F,Xue X F,et al. The application of cubic B-spline collocation method in impact force identification[J]. Mechanical System & Signal Processing,2015,64-65: 413-427.
[17]He W Y,Wang Y,Ren W X. Dynamic force identification based on composite trigonometric wavelet shape function[J]. Mechanical System & Signal Processing,2020,141: 106493.
[18]Zhou X Y,He W,Zeng Y X,et al. A semi-analytical method for moving force identification of bridge structures based on the discrete cosine transform and FEM[J]. Mechanical System & Signal Processing,2022,180: 109444.
[19]Xu B H,Chen Y H,Yu L. Identification of moving vehicle loads using instantaneous vision-based vehicle spatiotemporal information and improved time domain method[J]. International Journal of Structural Stability & Dynamics,2023: 2450163.
[20]Pan C D,Yu L,Liu H L,et al. Moving force identification based on redundant concatenated dictionary and weighted L1-norm regularization[J]. Mechanical System & Signal Processing,2018,98: 32-49.
[21]Zhang Z H,He W Y,Ren W X. Moving force identification based on learning dictionary with double sparsity[J]. Mechanical System & Signal Processing,2022,170: 108811.
[22]Wahlberg B,Boyd S,Annergren M,et al. An ADMM algorithm for a class of total variation regularized estimation problems[J]. IFAC Procendings Volumes,2012,45(16): 83-88.
Integrating response prior information and weighted dictionary for moving force identification
YU Ling,LEI Yuan-dong,HOU Zhi-long
(MOE Key Laboratory of Disaster Forecast and Control in Engineering,School ASzUHPJtTRu17gubV5q1ACB9SjogI2uZOJup6hDC5i0=of Mechanics and Construction Engineering,Jinan University,Guangzhou 510632,China)
Abstract: Sparse regularization has been proven to be effective in addressing the ill-posed problem in moving force identification (MFI). However,existing methods often neglect frequency characteristic disparities between static and dynamic components in moving loads,thereby limiting the identification accuracy. Therefore,an MFI method integrating response prior information and weighted dictionary is proposed. A linear relationship between vehicle-induced bridge responses and moving vehicle loads is established in bridge-vehicle system. Once frequency domain analysis is separately performed on bending moment and acceleration responses,the obtained frequency prior information is then employed to construct weighted dictionaries that correspond to both static and dynamic load components. Subsequently,the static and dynamic components of moving loads are individually solved by alternating direction method of multipliers (ADMM). The effectiveness of proposed method is demonstrated through numerical simulations on a real bridge,and a series of MFI experiments are conducted in laboratory. Results show that the weighted dictionaries considering response prior information significantly improves the accuracy of force identification and enhance its robustness to noise.
Key words: moving force identification;bridge health monitoring;prior information of response;weighted dictionary;sparse regularization
作者簡(jiǎn)介: 余 嶺(1963—),男,博士,教授。E-mail: lyu1997@163.com。
通訊作者: 侯支龍(1994—),男,博士研究生。E-mail: zhilonghou@163.com。
 振動(dòng)工程學(xué)報(bào)2024年10期
振動(dòng)工程學(xué)報(bào)2024年10期
- 振動(dòng)工程學(xué)報(bào)的其它文章
- 電動(dòng)力繩系衛(wèi)星系統(tǒng)長(zhǎng)期離軌動(dòng)力學(xué)建模與控制設(shè)計(jì)方法
- 柔性機(jī)械臂干擾力觀測(cè)與無模型振動(dòng)控制
- 彈性全模突風(fēng)動(dòng)載荷風(fēng)洞試驗(yàn)技術(shù)研究
- 面向動(dòng)態(tài)特性指標(biāo)的機(jī)電伺服系統(tǒng)PID設(shè)計(jì)方法
- 運(yùn)載火箭姿態(tài)控制速率陀螺自適應(yīng)加權(quán)方法
- 無人機(jī)四繩吊掛運(yùn)輸系統(tǒng)動(dòng)力學(xué)與控制