電動力繩系衛星系統長期離軌動力學建模與控制設計方法
2024-10-24 00:00:00顏家慧陳提文浩羅操群彭文軒惲衛東
振動工程學報 2024年10期






摘要: 本文針對電動力繩系衛星系統的長期離軌問題,研究離軌過程中系統的非線性動力學建模以及離軌控制設計方法。基于啞鈴模型假設,進行系統的姿態動力學建模。為提高動力學建模精度,計入電動力、大氣阻力和地球J2攝動等動力學載荷對系統軌道運動的影響,采用修正的非奇異軌道要素描述系統的軌道動力學。針對離軌的動力學控制問題,提出了常值電流輸入、方向可變的電流輸入和最優控制三種電流控制設計方法,通過系繩電流設計調節電動力載荷實現離軌機動。在最優控制設計方法中,構建了帶非線性約束的動力學反問題,基于非線性規劃算法求解該反問題,得到最優控制參考軌跡,通過閉環反饋跟蹤修正電流進行離軌。另外,提出了一種基于能量的電流開關控制策略輔助離軌,以保持系統姿態穩定和高效地利用電動力。為高效離軌對系統進行了動力學設計,并通過仿真算例對比分析了控制方法的離軌效率,驗證了控制方法的有效性。
關鍵詞: 繩系衛星系統; 電動力; 最優控制; 長期離軌
中圖分類號: O313.7; V412.4 文獻標志碼: A 文章編號: 1004-4523(2024)10-1792-11
DOI:10.16385/j.cnki.issn.1004-4523.2024.10.018
引 言
近年來,由于太空技術發展與其成本的下降,世界各國進行了多次太空任務,產生的太空垃圾飛速增長,其對在軌航天器和地球環境的威脅不可忽視。為清除太空垃圾,學者們提出了多種解決方案,如太陽帆、機械臂和繩網捕捉等,以實現太空環境的清理,降低在軌航天器的碰撞風險[1?3]。其中,電動力繩系衛星技術因無需消耗推進劑、綠色環保、易于實現和成本低等優點受到廣泛關注。不同于其他需要額外推力的清理方式,電動力繩系衛星系統利用導電系繩切割地磁場,產生電動力作為動力實現空間碎片的離軌機動[4?7]。然而,當電動力繩系衛星系統在傾斜軌道上離軌時,電動力會不斷向系統注入能量,導致系繩產生大幅度的擺動,影響運動穩定性[8?9]。另外,考慮到電?磁耦合、環境攝動影響以及姿態運動和軌道運動間的耦合作用[10?12],電動力繩系衛星系統的在軌運動呈現出強非線性,給系統的穩定離軌機動帶來困難。
為解決這些問題,國內外學者針對電動力繩系衛星系統的離軌動力學與控制進行了深入研究。Corsi等[13]曾提出一種基于李雅普諾夫/哈密頓函數的電流開關控制方法來調節電流以限制系繩擺動。Williams[14?15]基于能量率反饋機制設計了一種跟蹤控制方法,基于系繩實際的擺動能量速率與參考軌跡進行反饋控制,實現系繩擺動的長期穩定;隨后,又提出了時域差分速度最優控制方法以及時滯擺動速率預測反饋電流控制,結合Chebyshev?Gauss?Lobatto偽譜法解決最優軌道轉移過程中系統電流的快速調節問題。Kojima等[16]研究了電動力繩系系統在橢圓軌道上的混沌擺動,基于系統的局部穩定性提出了時滯速率反饋電流控制方法,在增強系統魯棒性的同時減少了控制功耗。張健等[17]針對電動力繩系衛星系統的軌道機動問題,設計了常值電流控制、Bang?Bang式可變電流控制和傅里葉形式電流控制三種不同的電流控制方法。Li等[18]采用退步控制與滑模控制相結合的非線性控制方法來減小系統的擺角,提高系統的魯棒性。Wen等[19]針對電動力繩系衛星系統的離軌問題,提出了系繩電流的模型預測控制方法和自適應增益策略來穩定系繩擺動;此外,基于電動力繩系衛星非奇異動力學模型,設計了一種基于能量方法的擺動抑制控制方法[20]。Luo等[21]提出了一種基于能量率的閉環跟蹤控制方法,通過跟蹤軌道周期解來降低計算難度,從而實現系統的長期離軌。上述研究大多關注離軌過程系繩擺動的穩定控制,未考慮長期離軌過程中控制方案的離軌效率。
本文關注電動力繩系系統長期高效離軌過程中的動力學與控制問題。為研究電動力繩系衛星長期離軌過程的動力學問題,本文基于啞鈴模型假設建立系統的姿態動力學模型,采用非奇異軌道參數描述系統軌道運動,同時計入電動力、大氣阻力和地球J2攝動的影響。針對系統的長期離軌控制問題,基于電流開關控制和最優控制提出了多種控制設計方法,并通過對比分析研究了不同控制設計方法下電動力繩系衛星系統的離軌效率。在保證離軌穩定性的同時,通過設計控制參數,提高離軌效率,實現系統的長期穩定離軌。
1 動力學模型
本文關注的電動力繩系衛星系統由主星M、子星S以及連接主星和子星的電動力系繩t組成。假設系統質心運行在開普勒傾斜軌道上。主星、子星和系繩的質量分別為,和,且系繩長度為。基于啞鈴模型假設建立系統動力學模型,忽略衛星姿態和系繩柔性。在長期離軌過程中,系統的運動可分為慢變的軌道運動及快變的姿態運動,下面從這兩方面建立系統的動力學模型。
1.1 軌道運動
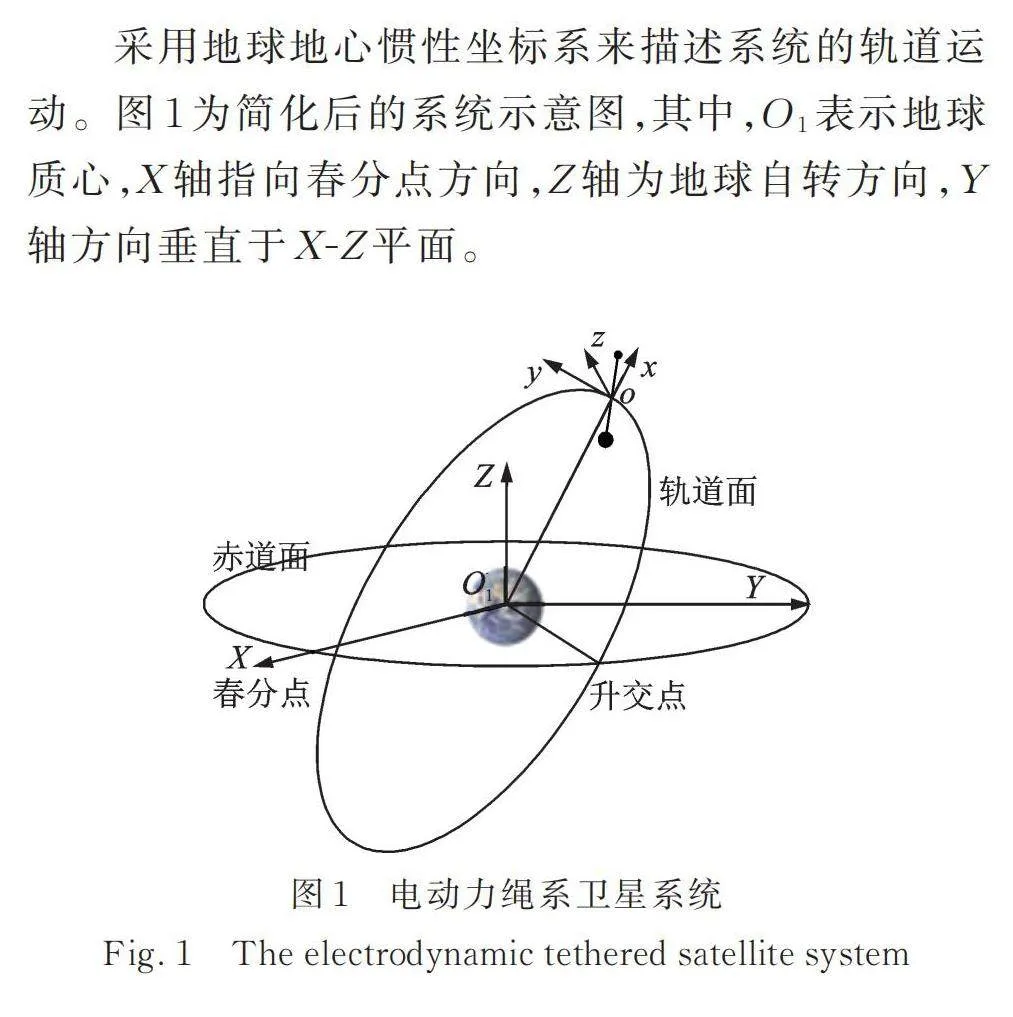
采用地球地心慣性坐標系來描述系統的軌道運動。圖1為簡化后的系統示意圖,其中,表示地球質心,X軸指向春分點方向,Z軸為地球自轉方向,Y軸方向垂直于X?Z平面。
由于基于經典軌道根數的軌道方程在偏心率為0以及軌道傾角為0°或90°時會產生奇異現象,故在描述軌道運動時,采用修正的非奇異軌道參數建立系統的軌道運動方程。非奇異軌道參數為:
(1)
式中 軌道半長軸a、軌道傾角i、軌道偏心率e、升交點赤經、近地點輻角和真近點角ν為經典軌道根數。
用高斯變化方程表示系統軌道根數隨時間的變化[19]:
(2)
其中:
(3)
式中 “”表示對時間t的導數;為攝動力引起的系統攝動加速度,其中,為電動力,為大氣阻力攝動,為地球引力場不均勻性導致的攝動,各攝動力的具體描述見附錄,為系統總質量;,,分別為攝動加速度在軌道坐標系三個主軸上的投影分量;為地球引力常數。
1.2 姿態運動
采用參考軌道坐標系來描述系統的姿態運動,如圖2所示。表示系統質心,軸和軸分別指向天頂和系統飛行方向,軸與軸和軸形成右手坐標系。系統相對于軌道坐標系的瞬時姿態可由俯仰角以及滾轉角描述。
系統的動能由系統牽連運動動能、系統繞質心相對轉動動能以及系統相對質心徑向運動動能組成,總動能表示為:
(4)
其中:
(5)
式中 為軌道坐標系角速率;為系統質心相對于地球質心的運行半徑。
系統的勢能主要是指重力勢能Vg。假設系統由無數質點組成,其中任一質點相對于系統質心的位置向量為 ,則系統勢能為:
(6)
式中 表示向量的二范數算子。由于繩長遠小于軌道半徑,即,對式(6)展開并省略,,的二次以上項,得到系統勢能的簡化公式:
(7)
根據第二類拉格朗日Lagrange方程,建立系統的姿態運動控制方程[22]:
(8)
式中 Qe和Qφ分別表示電動力與大氣阻力在俯仰角方向和滾動角方向產生的廣義力炬,且有:
(9)
表示軌道坐標系下的局部地磁強度,通過虛功原理推導出由洛倫茲力引起的廣義扭矩與:
(10)
式中
(11)
其中,為從主星M指向子星S的系繩方向單位矢量,可表示為:
(12)
大氣阻力引起的廣義扭矩與可分別表示為:
(13)
式中 ,與分別為主星、子星與系繩各部分所受大氣阻力;s1,s2可分別表示為:
(14)
基于上述內容,式(2)和(8)描述了系統的完整動力學模型。
2 控制設計方法
本節針對電動力繩系衛星系統長期離軌給出三種不同的控制設計方案,分別是:包括常值電流輸入與方向可變的電流輸入的直接控制設計方案,以及最優控制設計方案。
2.1 直接控制設計方案
在直接控制設計方案中,給出一種基于能量的電流開關控制策略,其原理是通過主動控制電動力系繩上產生的電動力來實現系繩上的阻尼注入,控制系繩擺動,同時最大化洛倫茲力對系統的離軌作用。
引入兩種參數[23]:
(15)
式中 與表示擺角的方向;為感生電勢,其中為系統相對于地球的軌道速度;與表示廣義力相對于擺角的方向。
電流控制律為:
(16)
當且僅當系繩擺角均小于固定值或兩種廣義力對系繩擺動的瞬時總功率為負時,打開電流。
根據軌道特性給出常值電流輸入,其電流大小與電流方向均保持恒定,給出電流:
(17)
記該常值電流輸入方案為控制方案1。
電動力繩系衛星系統離軌機動過程中由于電動力產生的耗散功率[24]為:
(18)
式中 表示電動力。當感生電勢與電流同向時,所產生的耗散功率為負,即電動力對系統做負功。據此,給出方向可變的電流輸入:
(19)
記該可變電流輸入方案為控制方案2。
2.2 最優控制設計方案
在本節中,基于兩體電動力繩系衛星系統的簡單啞鈴模型,設計離軌過程中的最優控制設計方案。在最優控制設計方案中,將系統的離軌問題建立為帶非線性約束的優化問題,通過優化給定的性能指標函數,規劃系統狀態變量和設計控制輸入使系統最終達到期望的目標狀態。最優控制設計方案通過控制設計調節系統特性,屬于動力學反問題的范疇[25]。
為簡化計算并保持磁場精度,在最優控制模型中采用非傾斜偶極子模型描述地磁場,地磁場強度在軌道系中表示為:
(20)
式中 。為地磁場軸的赤經;表示格林尼治恒星時,為地球磁偶極子強度。初始參數選定為:
(21)
引入狀態向量:
(22)
引入無量綱變換,系統的無量綱姿態動力學方程可以寫成狀態空間形式:
(23)
與為電動力產生的廣義力矩:
(24)
上述方程可以記為:
(25)
定義控制輸入變量:
(26)
將非線性最優控制問題按照數學形式表述為:
(27)
式中 控制周期從到時刻結束,為最優控制中的最大系繩電流輸入;為目標函數;為拉格朗日形式的性能指標函數。考慮離軌效率與系統的穩定性,設計性能指標函數為:
(28)
式中 ,; 表示系統的洛倫茲力所做的離軌功;為系統沿飛行方向的速度;為權系數。另外,性能指標函數中的第一和第二項在離軌過程中對系繩擺角起抑制作用,第三項用于系統的高效離軌。各項的增益系數通過反復計算確定,旨在保證姿態穩定性的同時,獲得較高的離軌效率。在求解過程中,利用勒讓德?高斯偽譜法將連續時間的非線性最優控制問題離散化為非線性規劃的離散參數優化問題。得到的離散參數優化問題基于MATLAB的軟件GPOPS進行求解。
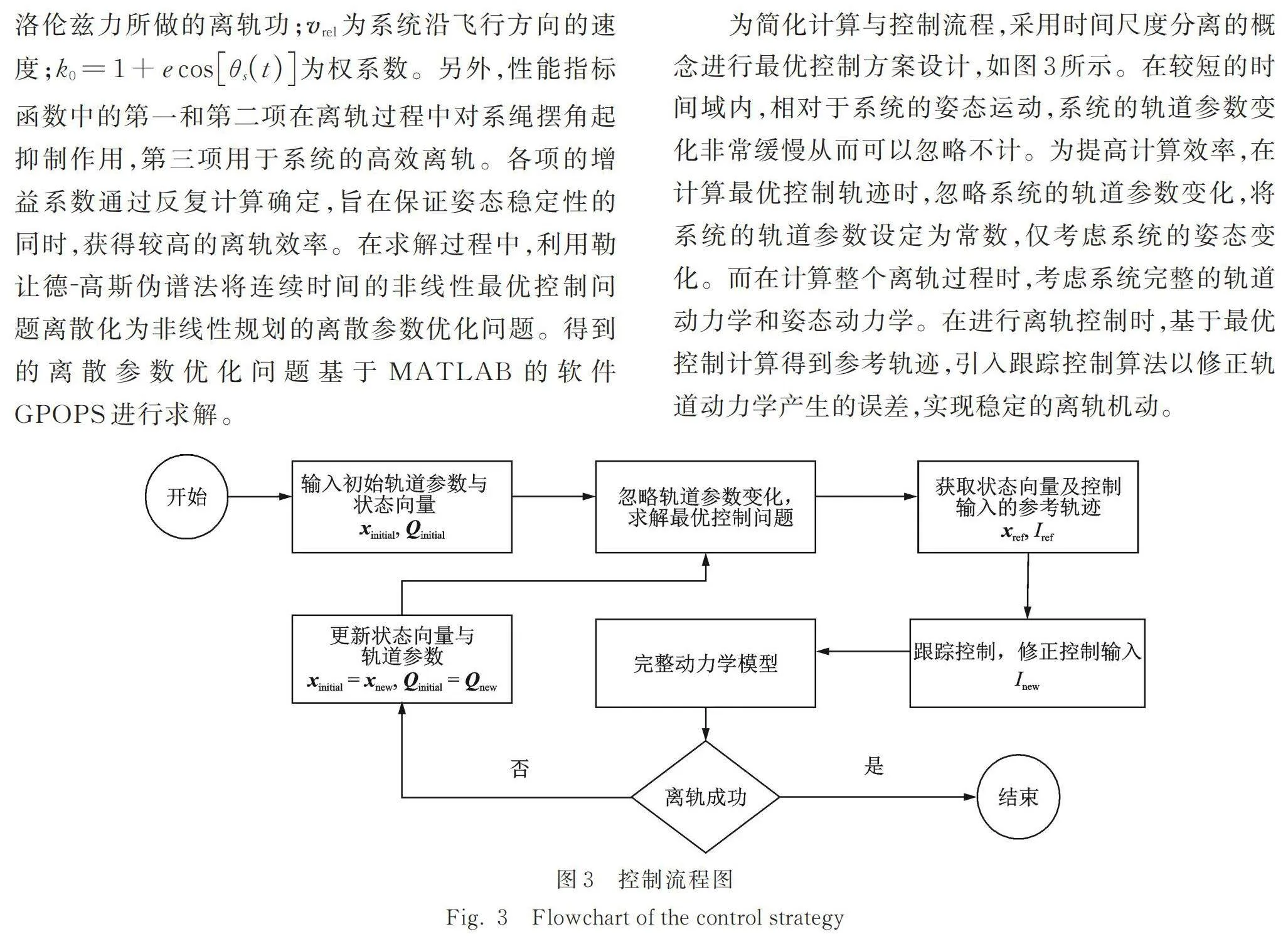
為簡化計算與控制流程,采用時間尺度分離的概念進行最優控制方案設計,如圖3所示。在較短的時間域內,相對于系統的姿態運動,系統的軌道參數變化非常緩慢從而可以忽略不計。為提高計算效率,在計算最優控制軌跡時,忽略系統的軌道參數變化,將系統的軌道參數設定為常數,僅考慮系統的姿態變化。而在計算整個離軌過程時,考慮系統完整的軌道動力學和姿態動力學。在進行離軌控制時,基于最優控制計算得到參考軌跡,引入跟蹤控制算法以修正軌道動力學產生的誤差,實現穩定的離軌機動。
將基于最優控制設計方案得到的參考電流控制輸入應用在系統的完整動力學模型上時,需考慮軌道參數變化對系統姿態動力學的影響。當軌道參數變化時,為保持系統姿態穩定,對參考的電流輸入進行跟蹤修正,所設計的電流的跟蹤控制律為:
(29)
且有:
(30)
式中 與為控制增益,與分別表示系繩初始擺動角和擺動角速度,與表示系繩參考擺動角和擺動角速度,表示最優控制方法得到的參考控制電流,和表示用于對系繩俯仰角和滾轉角方向運動誤差修正的控制電流,為修正的控制電流輸入,可表示為:
(31)
記最優控制設計方案為控制方案3。
3 算例研究
本節通過對幾種不同軌道工況進行數值仿真,進而分析三種控制設計的離軌效果。所有算例均在MATLAB(R2023a)上進行,數值模擬通過ode45求解。
表1給出了系統的物理參數,表2給出了兩種不同工況下系統的初始軌道參數。
在直接控制設計方案中,設置電流數值均為0.1 A。
另外,在最優控制設計方案中,控制參數設置為:
(32)
三種控制方案的系統初始擺角與擺角速度,即初始狀態參數均設置為0。
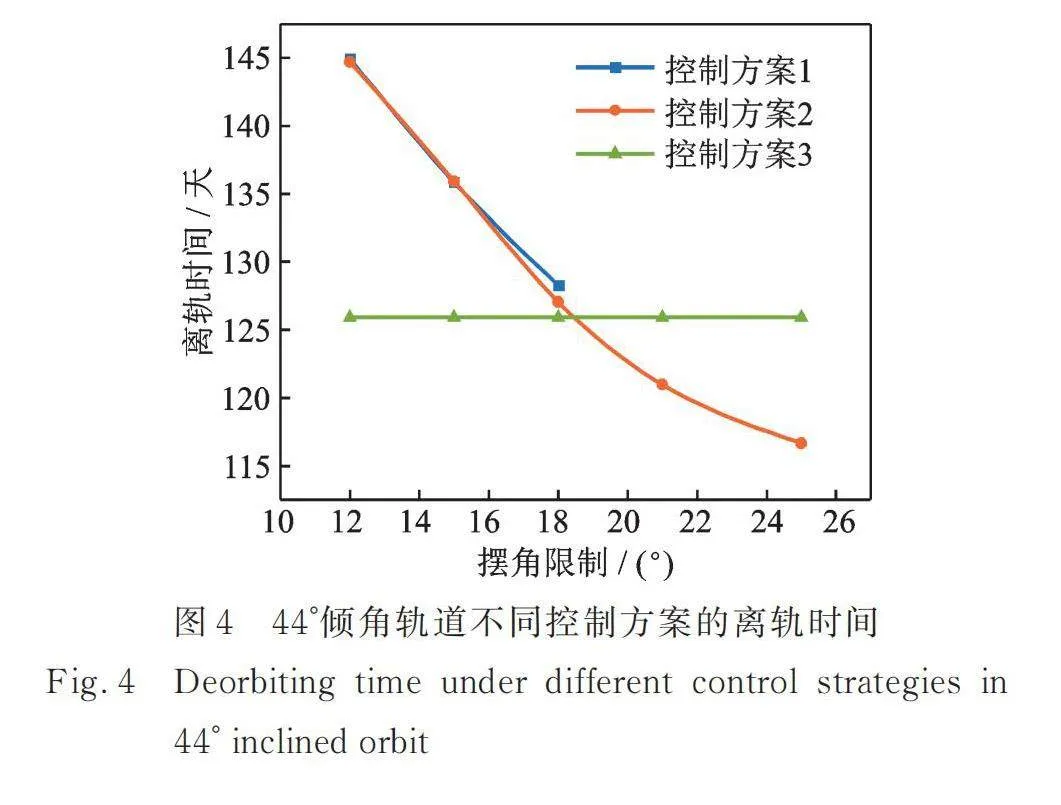
在仿真過程中,將軌道半長軸下降至450 km視為任務目標。在44°傾角軌道和不同擺角限制情況下,表3給出了系統在控制方案1與控制方案2作用下的離軌時間。可以發現,兩種直接控制設計方案效果基本相同。圖4給出了不同控制方案的離軌時間。需要注意的是,最優控制設計方案中在利用跟蹤控制律控制電流時,未設置擺角限制,因此系統在控制方案3作用下的離軌時間保持定值。關注控制方案1,表3僅給出了擺角限制從12°增長至18°時系統的離軌時間,這是由于繼續增大擺角限制,系統會由于電動力作用而失穩。將12°擺角限制下控制設計方案1所消耗的離軌時間作為基準進行對比,如表3所示,效率欄中的數值表示相應工況的效率變化,其中“+”代表效率的提升。
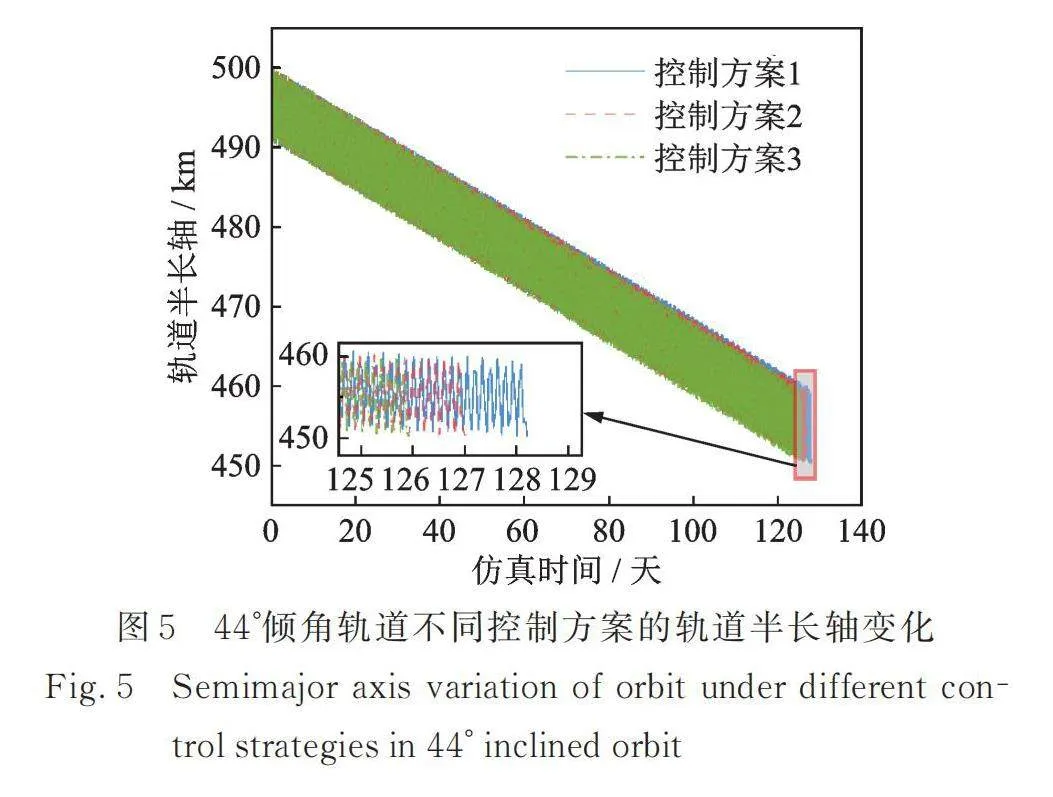
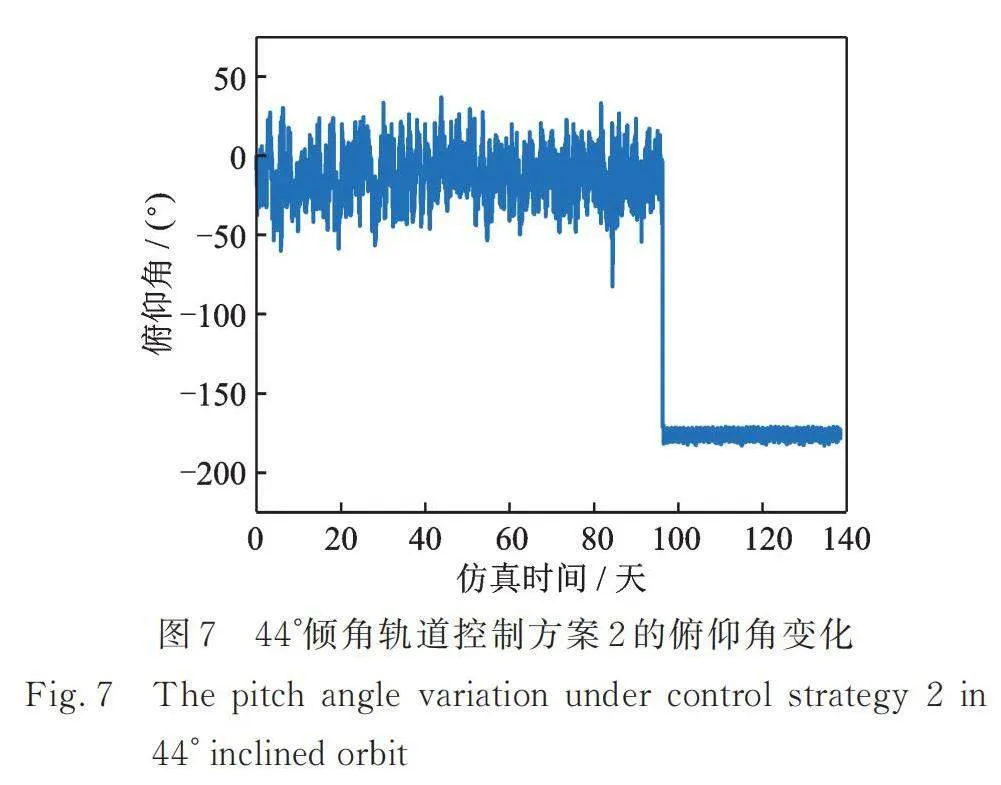
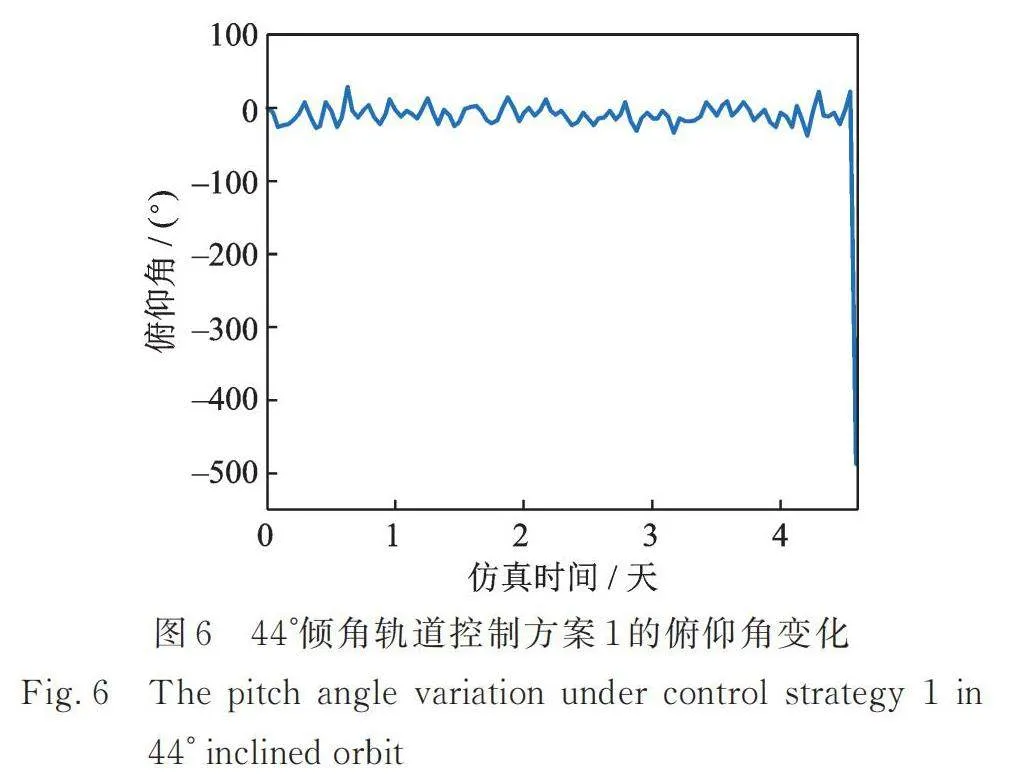
圖5為不同控制方案作用下系統的軌道半長軸變化曲線,其中控制方案1和控制方案2的擺角限制為18°。可以看出,此時三種控制方案的效率接近一致。圖6給出了擺角限制增大到21°時,系統在控制方案1作用下的俯仰角變化曲線。可以發現,系繩擺角迅速增大,導致系統失穩。從圖7中可以看出,當擺角限制為30°時,控制方案2作用下的系統發生翻滾。結果表明,對于在相同軌道傾角下的系統,控制方案2較控制方案1有更大的擺角限制閾值。另外可以發現,在保證系統穩定的情況下,增大擺角限制閾值,可以有效提高直接控制設計方案的離軌效率。
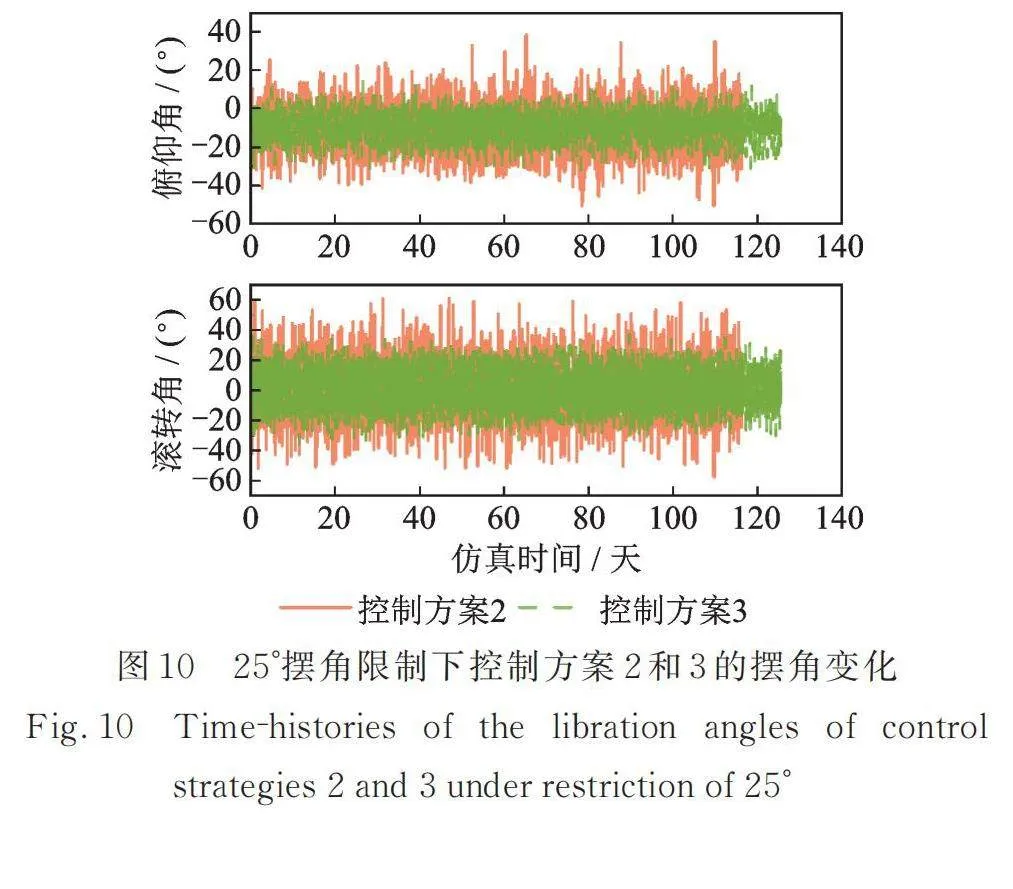
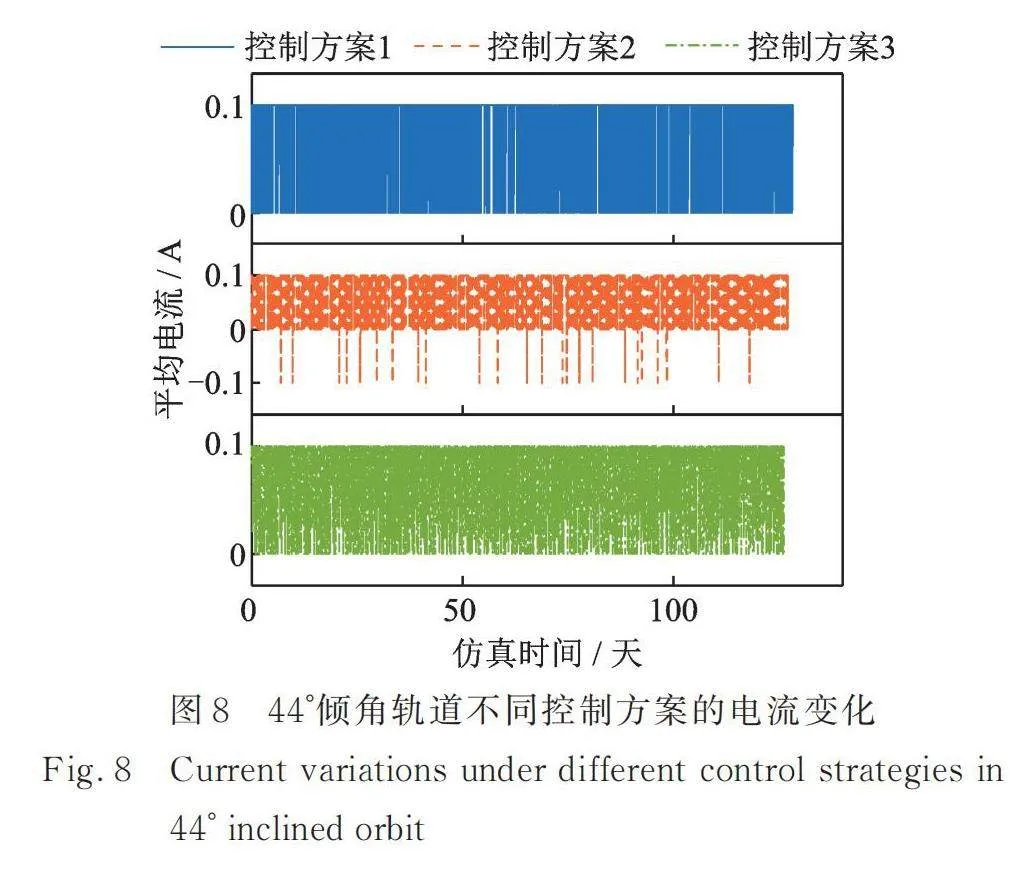
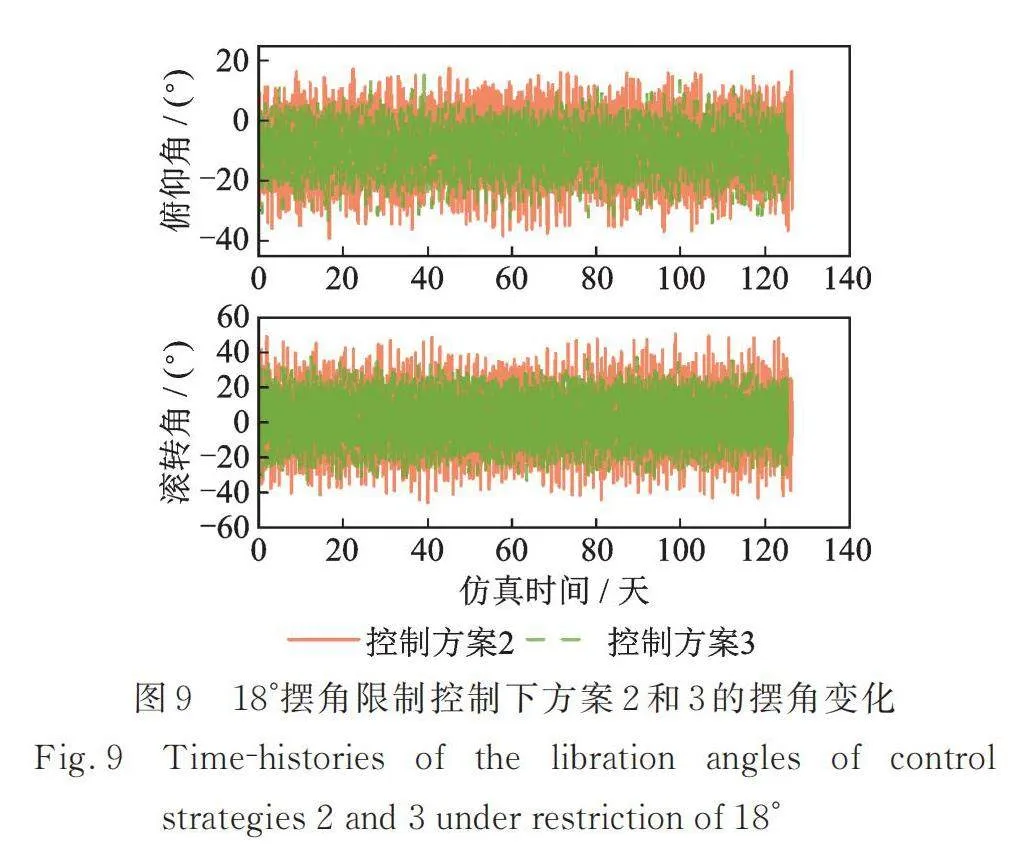
圖8給出了44°軌道傾角時,不同控制方案的電流變化對比,其中控制方案1和2的擺角限制為18°。圖9和10描述了擺角限制分別為18°和25°時,控制方案2和控制方案3的擺角對比。在44°傾角的軌道中,控制方案3的離軌時間為125.92天,相對于基準離軌時間,效率提升13.10%。當控制方案2擺角限制為18°時,控制方案3的系繩擺角相對于控制方案2更小,且離軌效率更高。當控制方案2擺角限制增大至25°時,系統離軌效率提高,但系繩最大擺角增大至50°左右時,系統穩定性較差。基于上述結果可以發現,當擺角限制大于18°以后,控制方案1的離軌效率優于最優控制設計方案。這是由于最優控制設計方案綜合考慮了系統穩定性和高效離軌。盡管在最優控制設計方案中未設置擺角約束,但由于所設計的目標函數,得到的電流控制輸入也被用于穩定系繩姿態,不是完全用于系統離軌。從圖9和10中可以發現,最優控制設計方案下的系繩擺角幅值較小,系統穩定性較好。因此,最優控制設計方案可以有效穩定系統姿態并使系統快速離軌,基于該方案得到的離軌天數是綜合考慮系統穩定性和高效離軌得到的離軌時長。
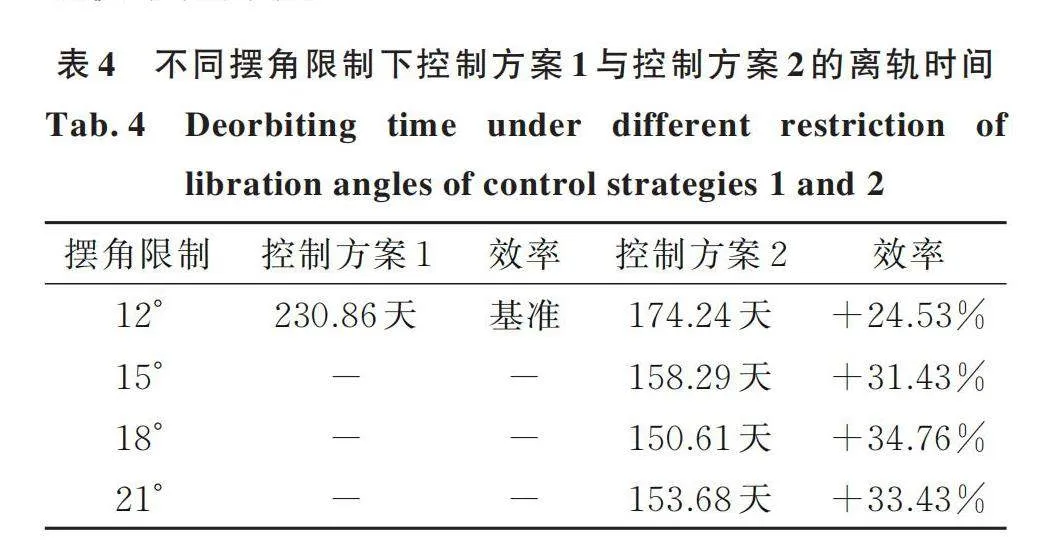
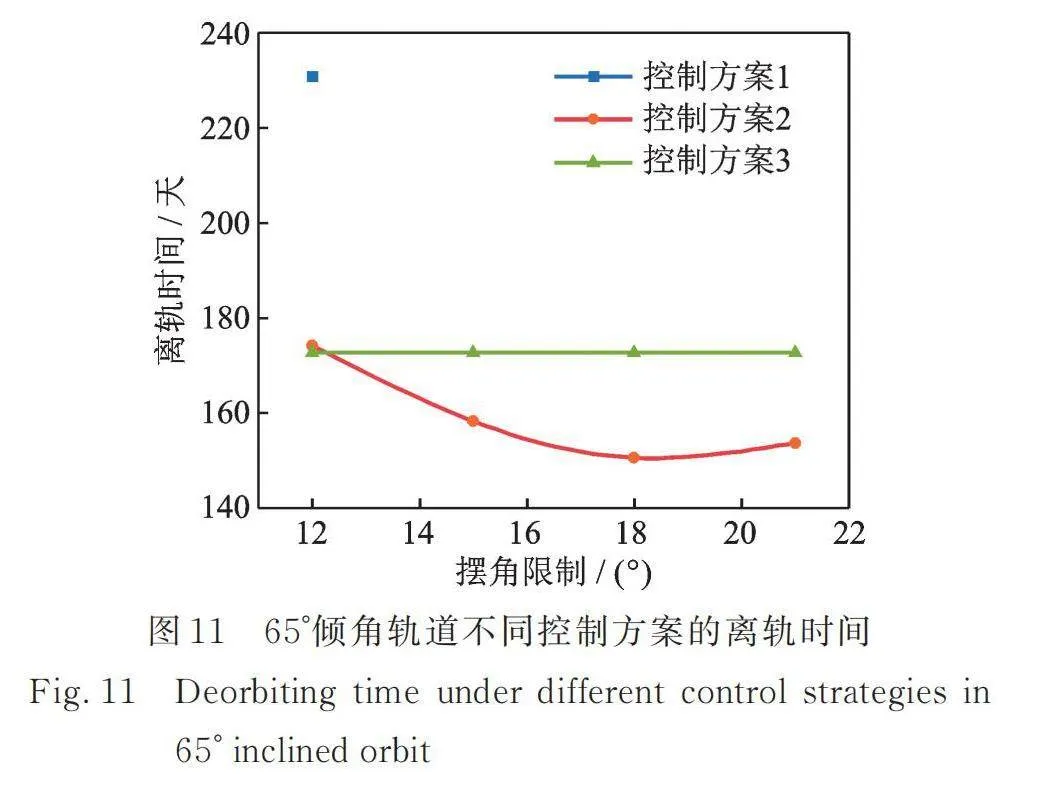
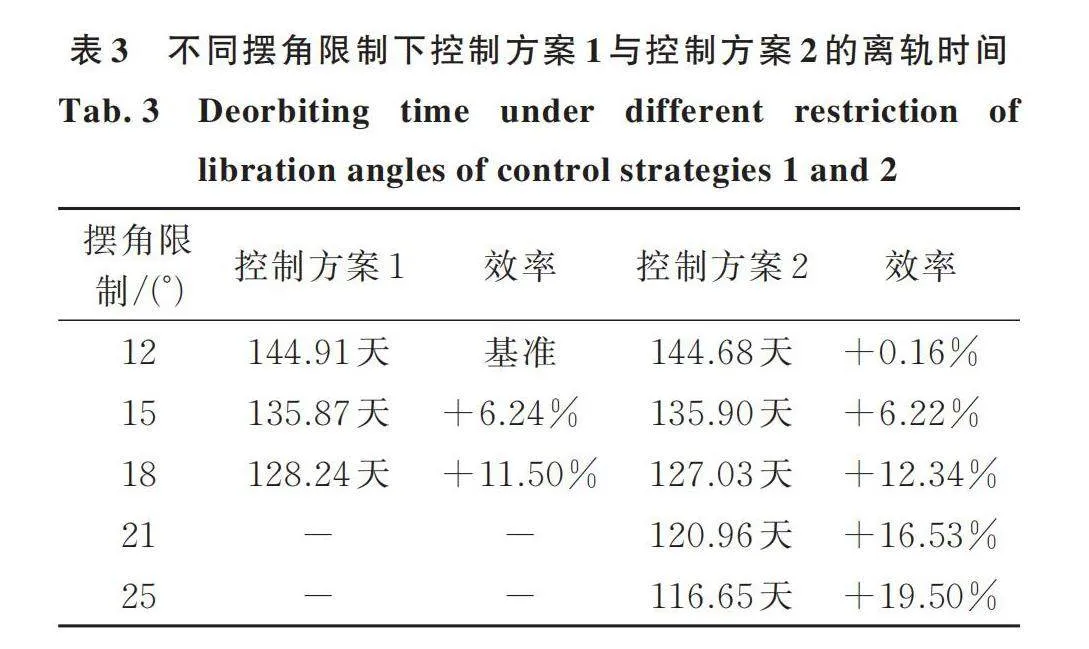
考慮位于65°傾角軌道上的系統,表4給出了不同擺角限制下控制方案1與2系統離軌時間的對比結果。另外,圖11中給出了不同控制方案下的離軌時間曲線。可以發現,在擺角限制為18°時,控制方案2有較高的離軌效率。與軌道傾角44°的情況類似,當擺角限制大于12°時,在控制方案1作用下系統會發生失穩,因此表4僅給出了擺角限制12°時控制方案1的離軌時間。值得注意的是,控制方案2在擺角限制為18°時有最高的離軌效率,這是由于系繩姿態、電流與磁場的非線性耦合關系,使控制方案2在65°軌道傾角和18°擺角限制情況下有最高的電流利用效率,此時系繩電流的作用時間更久,可以更快地使系統離軌。
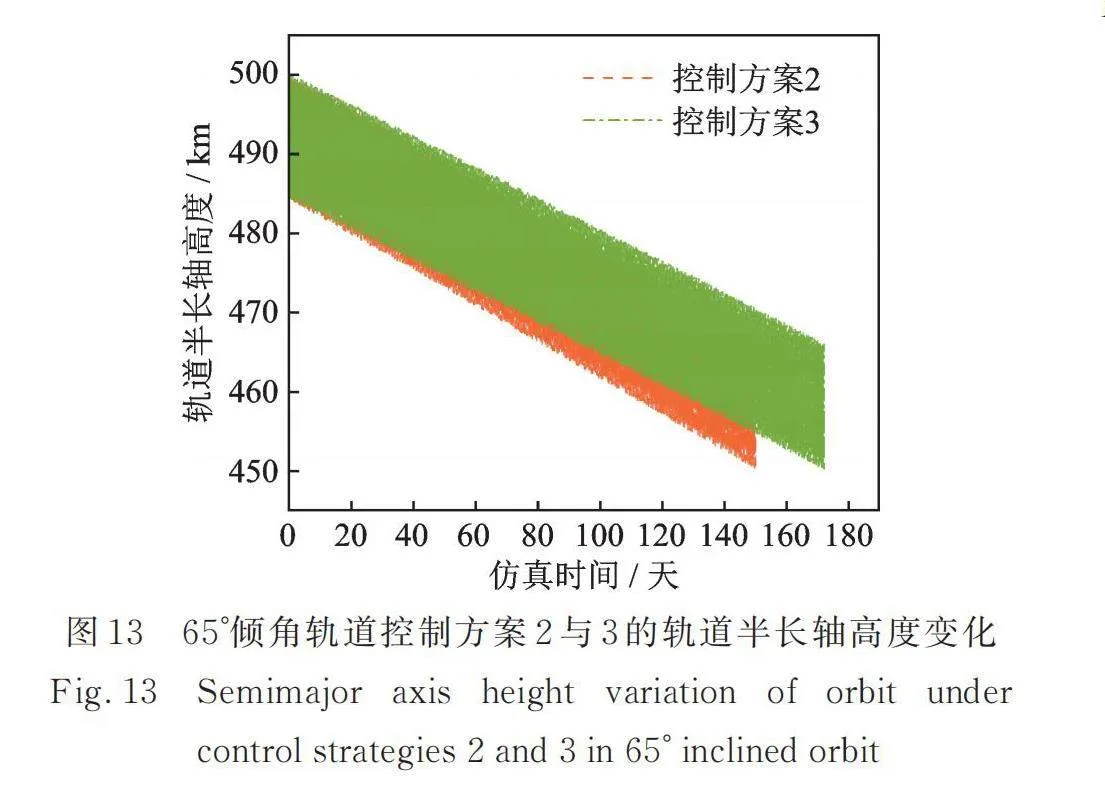
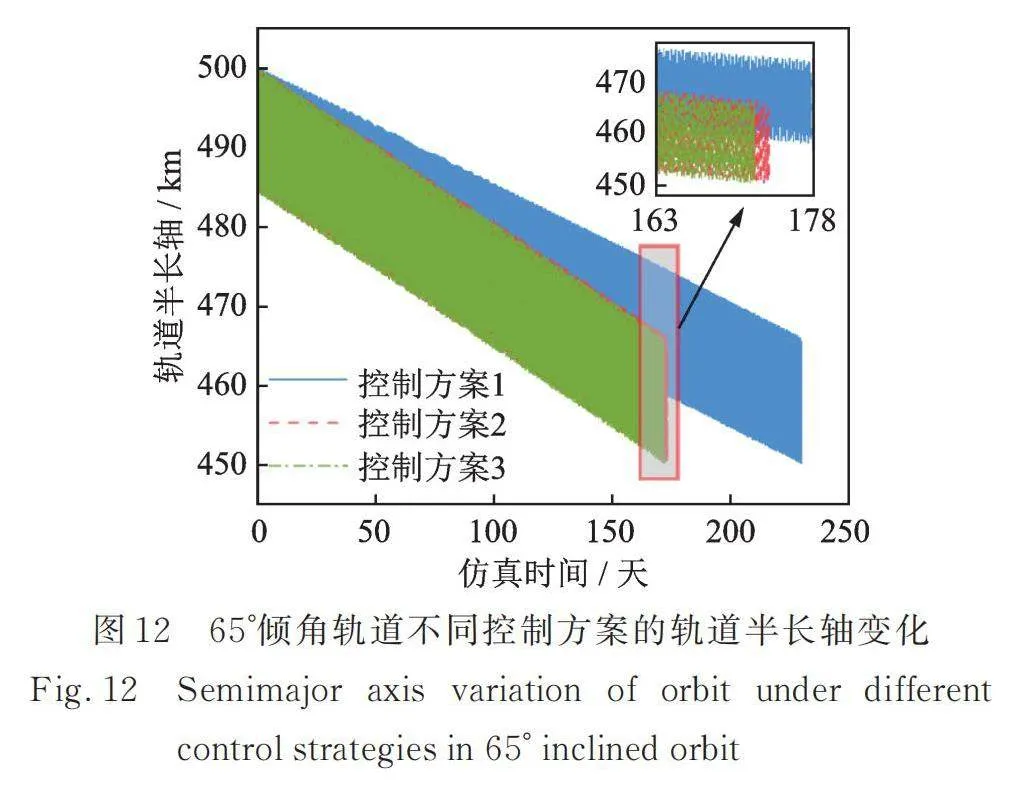
圖12給出了不同控制方案下系統的軌道半長軸變化曲線,其中直接控制設計方案的擺角限制為12°。可以看出,控制方案2與控制方案3的效率接近一致,相對控制方案1有明顯的效率提升。圖13給出了控制方案2與控制方案3的軌道半長軸高度變化。此時擺角限制為18°,可以發現控制方案2較控制方案3的離軌效率更高。
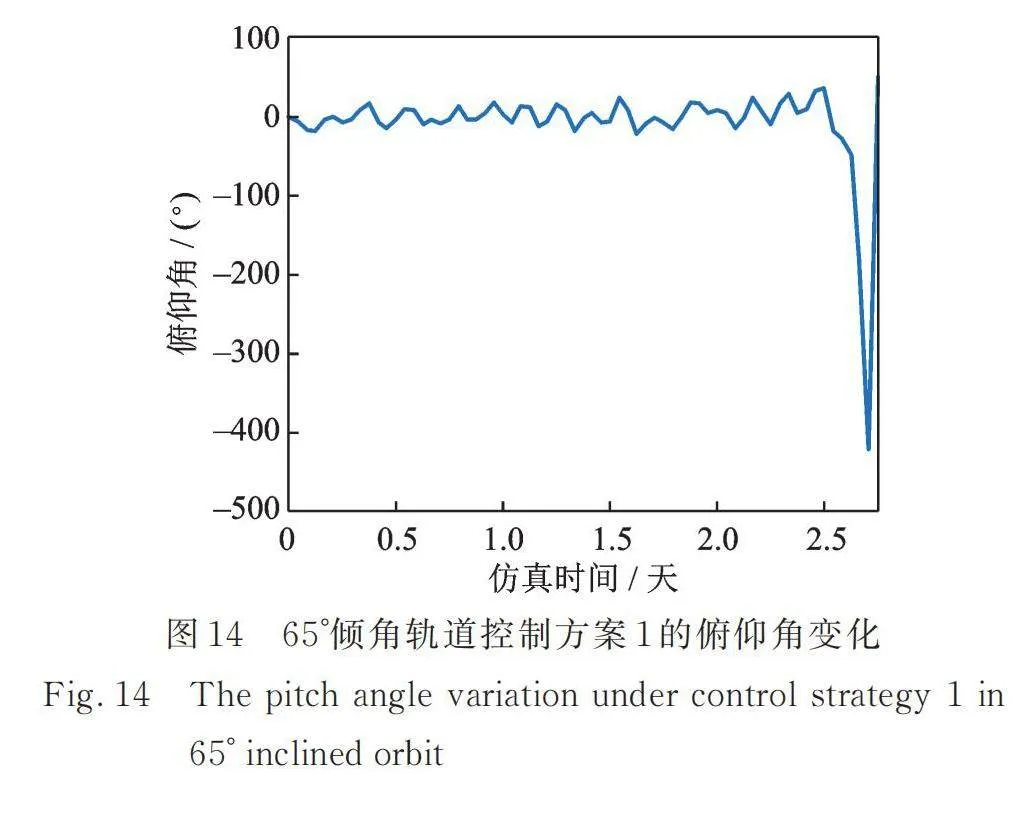
如圖14所示,當擺角限制增大到15°時,控制方案1作用下系繩的俯仰角會急劇增大,表明系繩在俯仰方向形成了旋轉運動,系統姿態無法穩定。對比圖4和11可以發現,降低軌道傾角可以提高不同控制方案下系統的離軌效率。
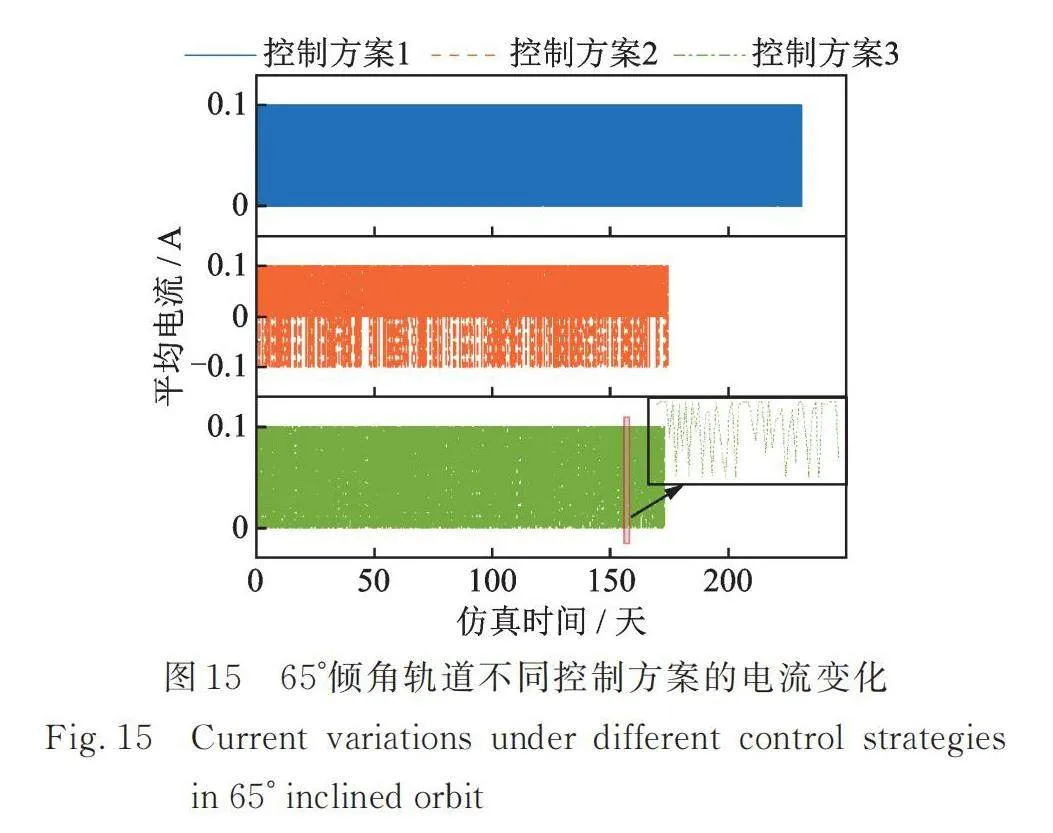
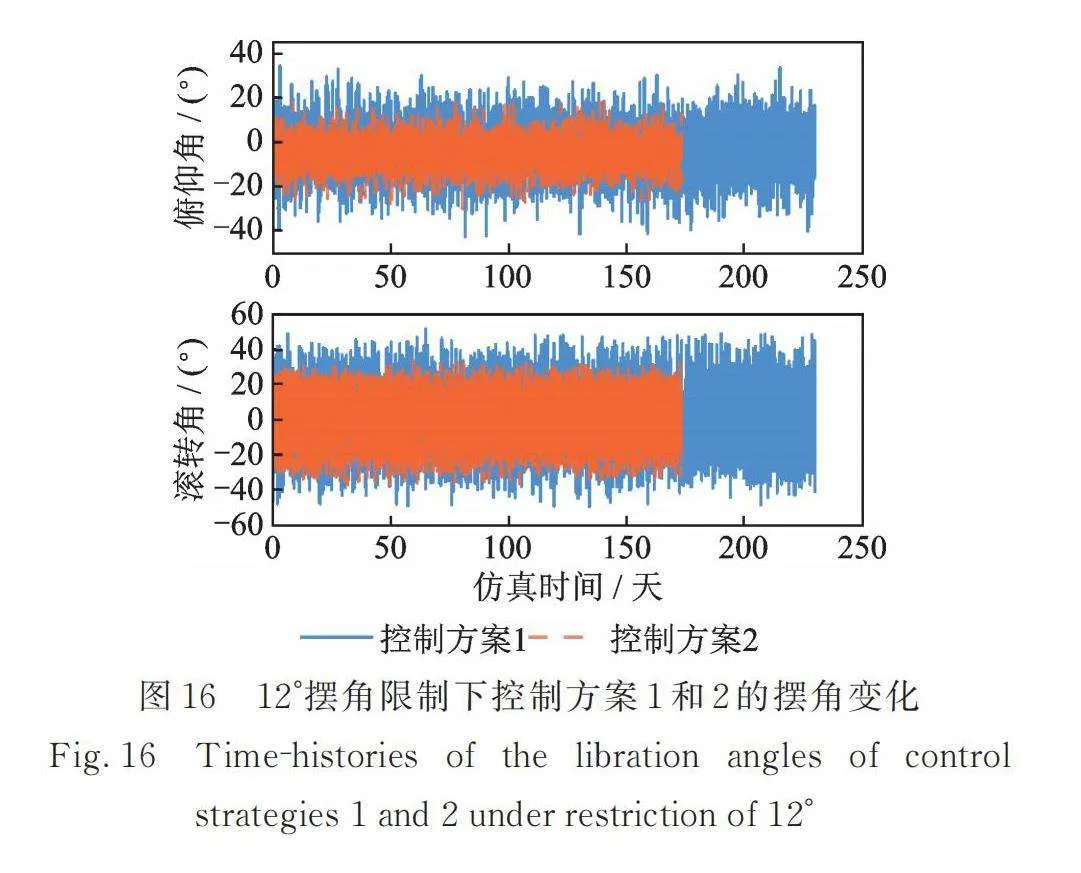
圖15為不同控制方案下的電流變化對比,其中直接控制設計方案的擺角限制為12°。圖16給出了擺角限制為12°時,系統在控制方案1和控制方案2下的俯仰角與滾轉角變化曲線。結合表4,控制方案2相對于控制方案1表現出更好的穩定性、更高的離軌效率以及更大的擺角限制閾值。
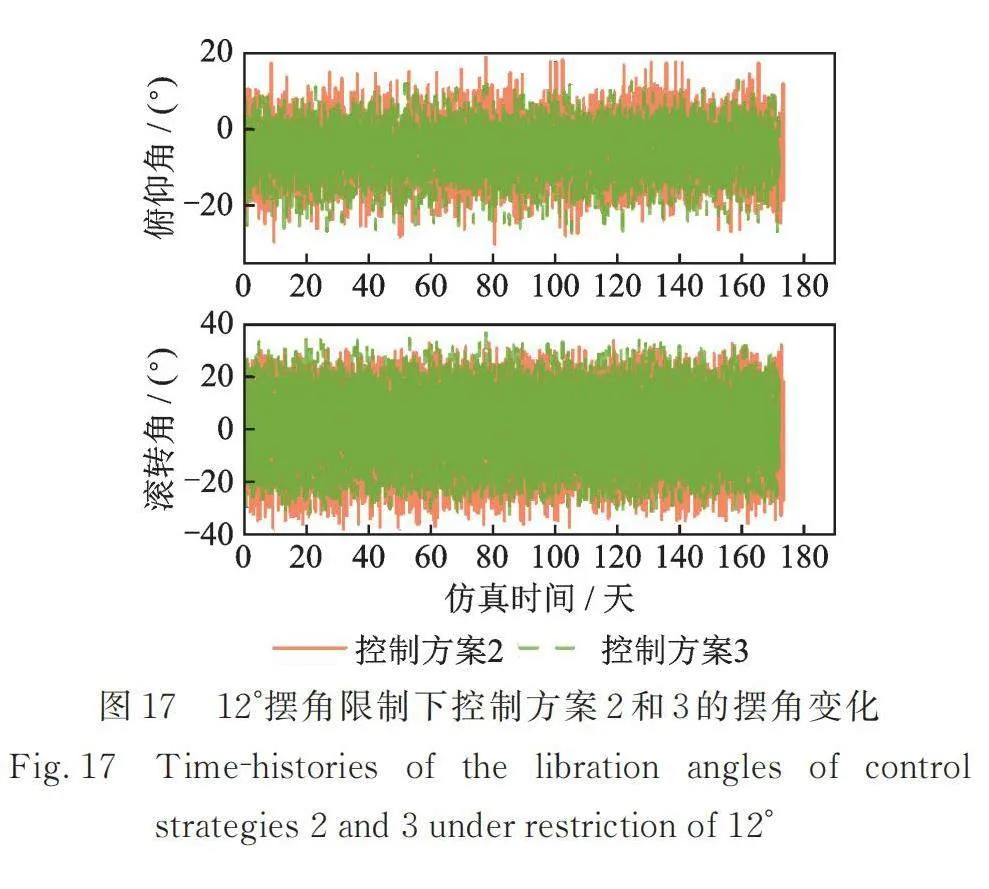
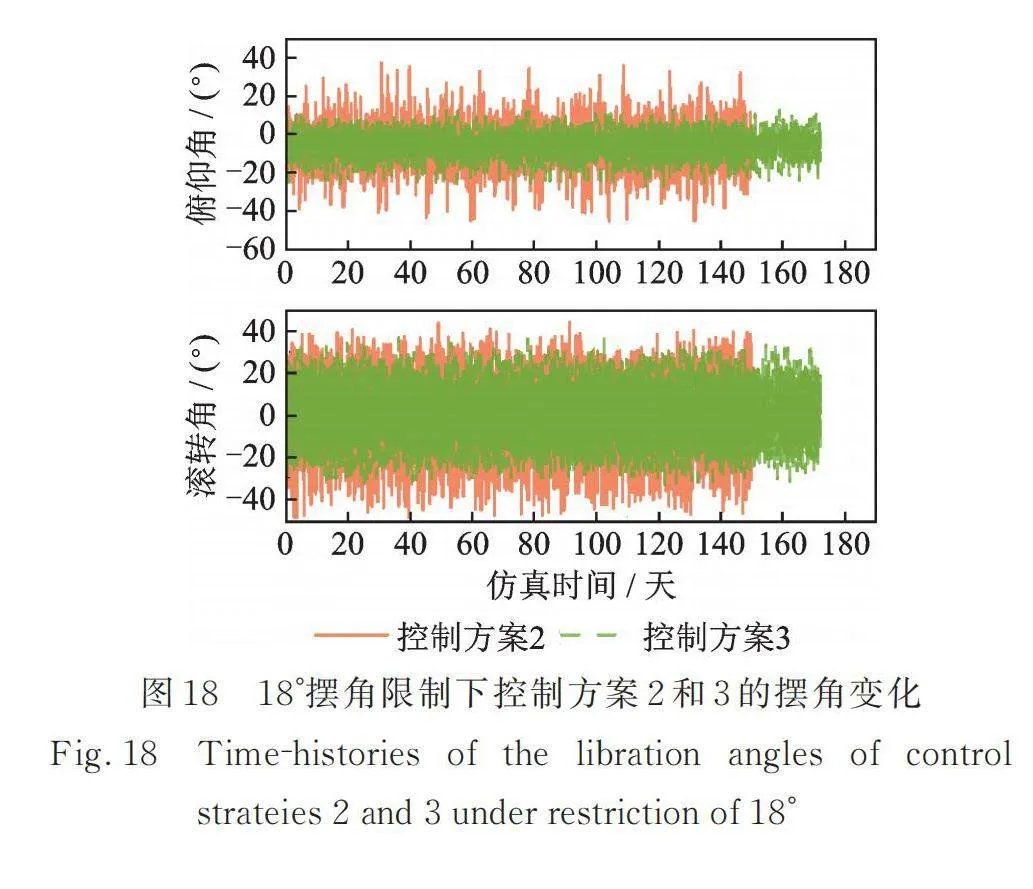
圖17給出了擺角限制為12°時,系統在控制方案2和控制方案3下的俯仰角與滾轉角變化曲線。在65°傾角的軌道中,控制方案3的離軌時間為172.74天,相對于基準離軌時間,效率提升25.18%。可以發現,控制方案3在保持系統穩定的同時,有較短的離軌時間。圖18表明,通過增大擺角限制閾值,控制方案2可以獲得較高的離軌效率,但系繩擺角會因此增大。
4 結 論
本文針對電動力繩系衛星系統的長期離軌動力學與控制問題,建立了考慮多種攝動力的精確動力學模型,提出了多種電流控制設計方法用于高效離軌。通過仿真對比分析,方向可變的電流控制方法相對于常值電流控制方法,表現出更好的穩定性與更高的離軌效率。在直接控制設計方案中,為防止系繩擺角過大,提出了根據擺角是否超過限制閾值判斷電流開關的控制策略,以維持系統穩定性。結果表明,通過增大擺角限制閾值,可以在保證系統穩定性的同時,有效提高離軌效率。需要注意的是,在增大系繩擺角限制時,需考慮系統穩定性。當擺角限制閾值過高時,系統可能會發生失穩,從而導致離軌效率降低。在所提出的控制設計方法中,最優控制設計方案可以有效限制系繩擺角,具有較好的系統穩定性,并且具有較高的離軌效率。
本文在進行離軌效率分析時,僅從控制參數設計進行考慮,后續研究可分析主子星質量比等物理參數對系統離軌效率的影響,針對系統物理參數進行優化設計,進一步提高離軌效率。
參考文獻:
[1]曹喜濱,李峰,張錦繡,等.空間碎片天基主動清除技術發展現狀及趨勢[J].國防科技大學學報,2015,37(4): 117?120.
Cao Xibin,Li Feng,Zhang Jinxiu,et al. Development status and tendency of active debris removal[J]. Journal of National University of Defense Technology,2015,37(4): 117?120.
[2]Zhang F,Huang P F. Fuzzy?based adaptive super-twisting sliding?mode control for a maneuverable tethered space net robot[J]. IEEE Transactions on Fuzzy Systems,2021,29(7): 1739?1749.
[3]Shi G F,Zhu Z H. Libration?free cargo transfer of floating space elevator[J]. Nonlinear Dynamics,2022,110(3): 2263?2281.
[4]Li X L,Yang K Y,Zhang J R. The dynamic instability analysis of electrodynamic tether system[J]. Nonlinear Dynamics,2024,112: 13771?13784.
[5]Du C G,Zhu Z H,Kang J J. Attitude control and stability analysis of electric sail[J]. IEEE Transactions on Aerospace and Electronic Systems,2022,58(6): 5560?5570.
[6]Aslanov V S,Ledkov A S. Survey of tether system technology for space debris removal missions[J]. Journal of Spacecraft and Rockets,2023,60(5): 1355?1371.
[7]Valmorbida A,Olivieri L,Brunello A,et al. Validation of enabling technologies for deorbiting devices based on electrodynamic tethers[J]. Acta Astronautica,2022,198: 707?719.
[8]PeláEz J,Lorenzini E C,LóPez?Rebollal O,et al. A new kind of dynamic instability in electrodynamic tethers[J]. The Journal of Astronautical Sciences,2000,48: 449?476.
[9]Voevodin P S,Zabolotnov Y M. Stabilizing the motion of a low?orbit electrodynamic tether system[J]. Journal of Computer and Systems Sciences International,2019,58(2): 270?285.
[10]Wen H,Jin D P,Hu H Y. Three?dimensional deployment of electro?dynamic tether via tension and current control with constraints[J]. Acta Astronautica,2016,129: 253?259.
[11]Yu B S,Wen H,Jin D P. Theory and experiment of space electrodynamic tether systems[J]. Advances in Mechanics,2016,46(1): 201605.
[12]Zhang J R,Li X L,Yang K Y,et al. A high?fidelity high?efficiency model for electrodynamic tether system based on recursive algorithm[J]. Acta Astronautica,2022,198: 617?630.
[13]Corsi J,Iess L. Stability and control of electrodynamic tethers for de?orbiting applications[J]. Acta Astronautica,2001,48(5?12): 491?501.
[14]Williams P. Energy rate feedback for libration control of electrodynamic tethers[J]. Journal of Guidance,Control,and Dynamics,2006,29(1): 221?223.
[15]Williams P. Optimal control of electrodynamic tether orbit transfers using timescale separation[J]. Journal of Guidance,Control,and Dynamics,2010,33(1): 88?98.
[16]Kojima H,Sugimoto T. Switching delayed feedback control for an electrodynamic tether system in an inclined elliptic orbit[J]. Acta Astronautica,2010,66(7?8): 1072?1080.
[17]張健,王峰,孫兆偉,等. 電動力繩系衛星軌道機動策略研究[J].宇航學報,2014,35(10): 1182?1188.
Zhang Jian,Wang Feng,Sun Zhaowei,et al. Research on orbit maneuver strategy for electrodynamic tether satellite[J]. Journal of Astronautics,2014,35(10): 1182?1188.
[18]Li Y F,Li A J,Wang C Q. Back?stepping sliding mode control for libration control of large swing angles of electrodynamic tether system[J]. Advances in Space ResearcK33VcP8ZaalQEJFj/UyXtg==h,2023,72(2): 231?242.
[19]Wen H,Zhu Z H,Jin D P,et al. Model predictive control with output feedback for a deorbiting electrodynamic tether system[J]. Journal of Guidance,Control,and Dynamics,2016,39(10): 2455?2460.
[20]Wen H,Jin D P,Hu H Y. Removing singularity of orientation description for modeling and controlling an electrodynamic tether[J]. Journal of Guidance,Control,and Dynamics,2018,41(3): 764?769.
[21]Luo C Q,Wen H ,Jin D P,et al. Long?term deorbiting control for an electrodynamic tether system exploiting periodic solutions[J]. Acta Astronautica,2023,202: 174?185.
[22]Zhong R,Zhu Z H. Optimal control of nanosatellite fast deorbit using electrodynamic tethers[J]. Journal of Guidance,Control,and Dynamics,2014,37(4): 1182?1194.
[23]Luo C Q,Wen H,Jin D P. Libration control of bare electrodynamic tether for three?dimensional deploy?ment[J]. Astrodynamics,2018,2(3): 187?199.
[24]Zhu Z H,Zhong R. Deorbiting dynamics of electro-dynamic tether[J]. International Journal of Aerospace and Lightweight Structures,2011,1(1): 47?66.
[25]Clason C,Kaltenbacher B. Optimal control and inverse problems[J]. Inverse Problems,2020,36(6): 060301.
[26]Alken P,Thébault E,Beggan C D,et al. International geo?magnetic reference field: the thirteenth generation[J]. Earth,Planets and Space,2021,73: 49.
Dynamics modeling and control design method for long?term deorbiting of an electrodynamic tether system
YAN Jia?hui1,CHEN Ti1,WEN Hao1,LUO Cao?qun1,PENG Wen?xuan2,YUN Wei?dong2
(1.State Key Laboratory of Mechanics and Control for Aerospace Structures,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China; 2.Shanghai Institute of Aerospace System Engineering,Shanghai 201108,China)
Abstract: This paper investigates the dynamics and control problems of the long-term deorbiting of an electrodynamic tethered satellite system. The dynamics modeling of the system is carried out based on a dumbbell model assumption. To improve the accuracy of the system model,the orbital dynamics is described using a set of modified equinoctial elements,involving the effects of Lorentz force,atmospheric drag and J2 perturbation force. Three current control strategies are proposed to regulate the electrodynamic forces for achieving a stable long-term deorbiting process,namely,the constant current input,the directionally variable current input,and the optimal control strategies. In the design of the optimal control strategy,the long-term deorbiting problem is formulated as an inverse problem of dynamics with nonlinear constraints,which is further solved via a nonlinear programming method to obtain the optimal reference trajectories. The deorbiting of the system is then achieved using the modified current control input obtained from a tracking feedback control law. Additionally,an energy-based current switch control strategy is adopted to ensure the stability of system and the efficient utilization of Lorentz force. Case studies of the system with designed physical parameters are conducted to analyze the deorbiting efficiency and to validate the effectiveness of the proposed control strategies.
Key words: tethered satellite system;electrodynamic;optimal control;long?term deorbiting
作者簡介: 顏家慧(2000―),女,碩士研究生。E?mail: 1796723887@nuaa.edu.cn。
通訊作者: 羅操群(1993―),男,博士,助理教授。E?mail: maillcq@nuaa.edu.cn。
附 錄
考慮到系繩長度遠小于地球半徑,故近似系統附近各處的磁場強度是相等的。本文考慮絕緣系繩,假設電流沿電動力系繩均勻分布。系繩所受的洛倫茲力為:
(A1)
可表示為:
(A2)
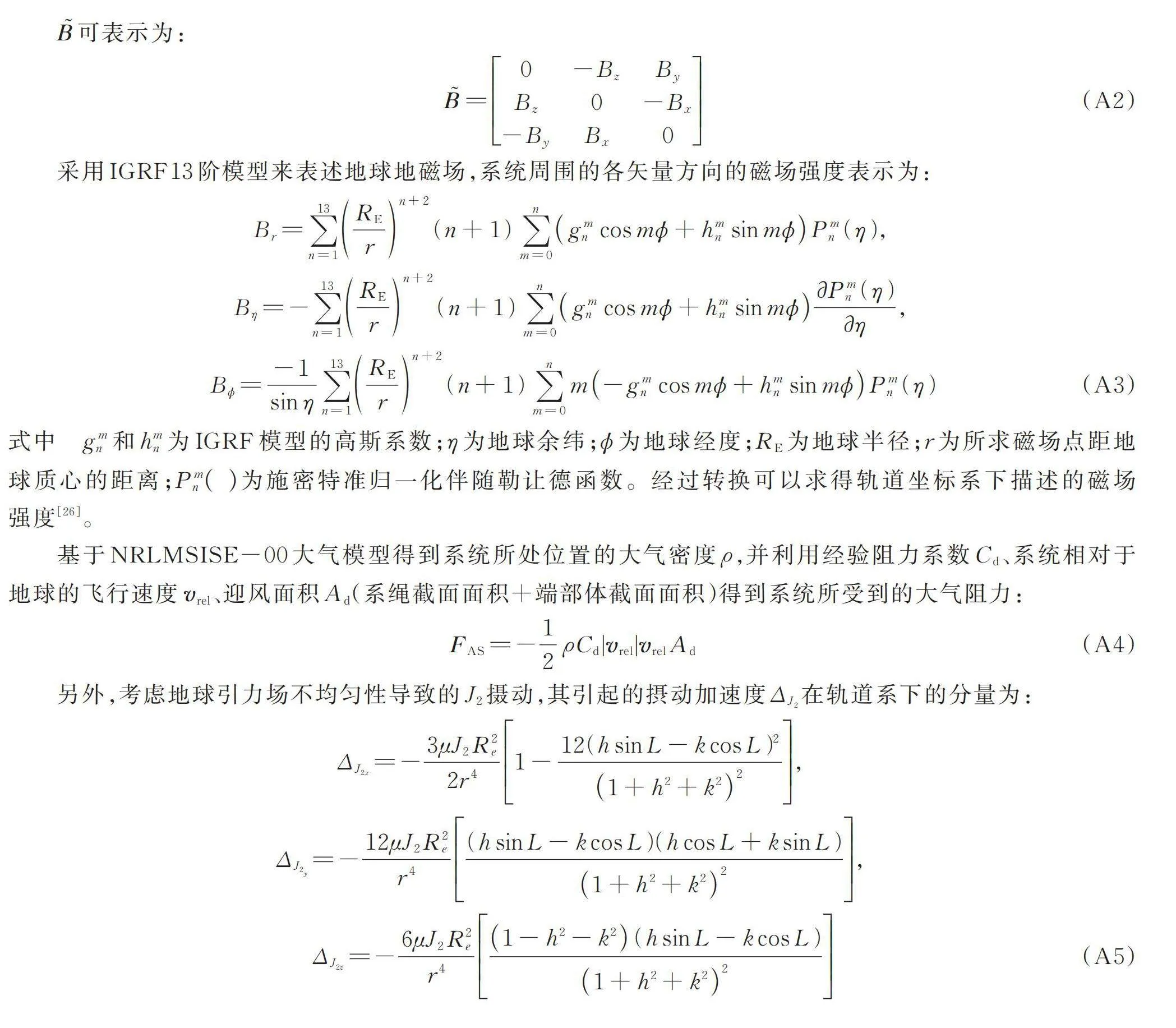
采用IGRF13階模型來表述地球地磁場,系統周圍的各矢量方向的磁場強度表示為:
(A3)
式中 和為IGRF模型的高斯系數;為地球余緯;為地球經度;為地球半徑;為所求磁場點距地球質心的距離;為施密特準歸一化伴隨勒讓德函數。經過轉換可以求得軌道坐標系下描述的磁場強度[26]。
基于NRLMSISE-00大氣模型得到系統所處位置的大氣密度,并利用經驗阻力系數、系統相對于地球的飛行速度、迎風面積(系繩截面面積+端部體截面面積)得到系統所受到的大氣阻力:
(A4)
另外,考慮地球引力場不均勻性導致的攝動,其引起的摂動加速度在軌道系下的分量為:
(A5)