基于IDBO-PID的聯合收獲機割臺控制系統
2024-11-05 00:00:00張峰碩苑嚴偉劉陽春王洋楊悅
農業工程 2024年10期

關鍵詞:無人農場;聯合收獲機;割臺高度;雙傾角傳感器;改進蜣螂優化算法;IDBO-PID
0 引言
實現農業現代化是我國全面建設社會主義現代化國家的重大任務,農業是關系著國計民生的重要產業[1]。在不斷失去人口紅利的現代化農業中,農業生產中信息化的占比也在不斷地增加,從傳統意義上的農業生產,到農業機械生產,再到無人化農業生產。無人農場是我國現代農業發展到一定階段的產物,是我國農業的發展方向。無人農場通過系統的智能感知、分析、決策,形成作業任務,無人駕駛農機進行田間作業,達到無人作業、自動作業、變量作業和精準作業的效果[2]。
無人農場里,聯合收獲機對于水稻、小麥等作物收割不僅要準確還要保持響應時間。它需要保持適當的割茬高度的同時,避免喂入量過大造成割臺堵塞的情況發生。同時,又要及時調整割臺高度以適應復雜的地形,避免割臺損壞[3]。調節割臺高度不僅僅能夠提高收割效率,更能為后續脫粒清選等工作提供保障。因此,聯合收獲機的割臺高度自適應調節對無人農場的順利運行起關鍵性作用。
目前,我國研究人員對于聯合收獲機割臺高度的檢測和調控方法,主要由傳感器檢測高度結合控制算法調節高度或仿形機構檢測結合控制算法來實現調控。楊銀輝[4]采用超聲波傳感器測量聯合收獲機割臺離地高度,并使用微控制器進行PID控制割臺高度調節。廖勇[5]使用拉桿式直線位移傳感器檢測液壓缸的伸縮量進行割臺的離地高度檢測,并采用模糊控制的方法進行聯合收獲機割臺控制。劉青山等[6]采用傾角傳感器對于聯合收獲機割臺運動進行數學模型分析,并使用PID控制聯合收獲機割臺升降。偉利國等[7]使用仿形結構檢測田間地形變化并使用PID控制割臺升降。
上述控制方法均采用傳統的PID控制,在無人農場作業中,聯合收獲機面臨著復雜多變的田間情況,傳統的PID控制往往難以滿足割臺高度自適應調節的高精度和快速響應要求。因此,本研究提出了一種基于改進的蜣螂優化(IDBO)算法來優化聯合收獲機割臺PID控制器。本方法能夠實現PID控制器參數的自動調整,以適應不同工作條件下的需求。通過在Matlab中進行仿真試驗,選取合適的性能指標對比IDBO-PID、DBO-PID及傳統PID控制器的性能,并驗證了IDBOPID控制器在穩定性和快速響應方面的優勢。
1 控制系統設計
本研究選取的聯合收獲機為雷沃谷神GM80型谷物聯合收獲機。整機高度2.98m、駕駛室寬度2.12m、工作幅寬2.75m,適用于收割小麥、水稻和玉米等作物。
1.1 結構與原理
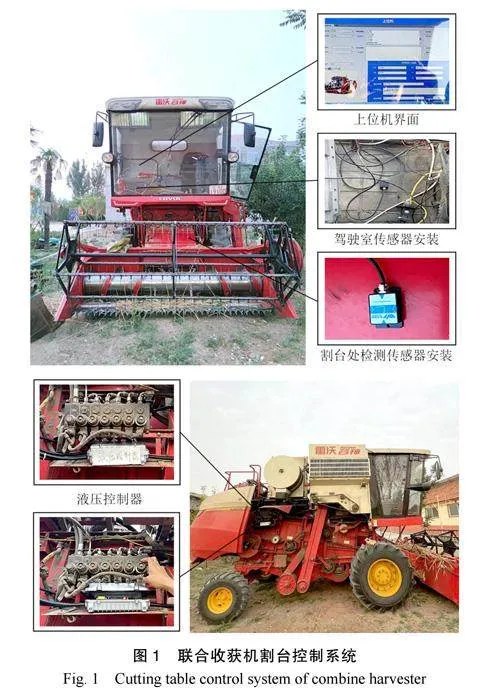
聯合收獲機割臺控制系統由聯合收獲機、車載終端工控機、兩個慣性測量單元(IMU)、繼電器、液壓系統和液壓控制器組成,如圖1所示。
由圖1可知,車載電腦作為上位機,安裝在駕駛室內便于時刻觀測聯合收獲機的工作狀況,兩個傾角傳感器分別安裝在糧食運輸器和駕駛室上,用于割臺高度檢測,控制器安裝在電磁閥下方便于調試和控制。
1.2 割臺高度檢測裝置標定
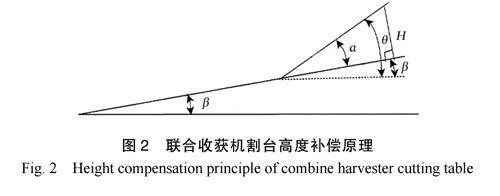
聯合收獲機在田間作業時,由于田間地形顛簸起伏,導致割臺高度測量不準確,進而影響割臺控制精度。因此采用了兩個傾角傳感器相結合的方式來實現割臺高度的測量與補償。兩個傾角傳感器分別安裝在糧食運輸器上與駕駛室內,用于完成對割臺傾角和車身傾角的測量。聯合收獲機割臺高度補償原理如圖2所示,圖中,θ為割臺傳感器與水平地面所成夾角;β為車身姿態與水平地面夾角;H為割臺離地實際高度;α為割臺傾角與車身傾角之差,即割臺實際傾角。
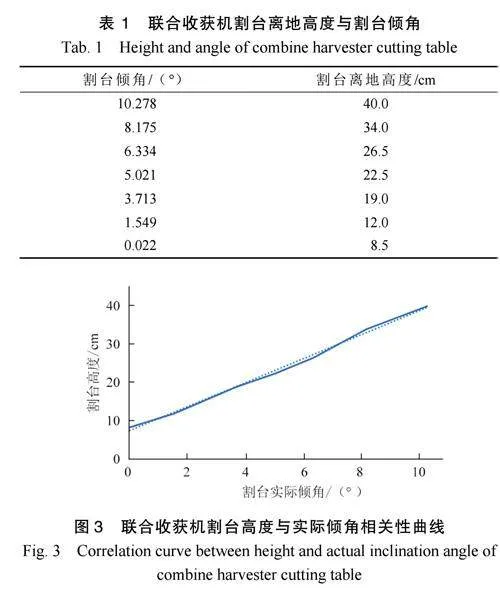
經過補償之后,對傳感器進行標定試驗,采取7組數據,記錄割臺傾角與相應高度,如表1所示。
根據表1數據,通過最小二乘法進行擬合,得到聯合收獲機割臺離地高度與割臺傾角擬合方程[8-10]。
割臺高度與割臺實際傾角的相關性曲線如圖3所示。使用最小二乘法擬合出來的曲線與趨勢線接近吻合,具有極高的相關性,其相關性達到0.9958,能夠精準地完成割臺離地高度的檢測。
2 基于DBO的改進算法
聯合收獲機作業時,對于割臺高度自適應調節的精度和響應時間要求較高,傳統的PID控制器需要人工不斷調節來進行參數標定[11-12]。利用群智能算法優化PID控制器參數的方式完成聯合收獲機割臺高度自適應調節,不僅能夠使用群智能算法尋求到PID控制的最優參數,還能夠提升控制器的響應速度和控制精度,解決了人工調整PID控制器導致控制精度低、響應速度慢的問題。其中,在群智能優化算法中蜣螂優化算法相較于其他群智能優化算法具有較快的響應時間和收斂精度,但是傳統的蜣螂優化算法(DBO)存在尋優能力較差、容易陷入局部最優解的問題[13]。所以針對這些缺點對蜣螂優化算法(DBO)進行優化改進。
2.1 算法改進
2.1.1 種群初始化改進
傳統的蜣螂優化算法在種群的初始化階段,采用隨機數的方式進行種群初始化位置,導致種群中的蜣螂位置良莠不齊,這樣算法尋優效果差,收斂的速度較低,全局搜索能力下降,因此引入混沌映射函數對于原算法的種群初始化進行改進。
混沌映射被應用于生成混沌序列,是一種隨機性序列,在優化領域,混沌映射可以用于生成隨機數,本研究使用Bernoulli混沌映射進行種群的初始化[14-16]。Bernoulli混沌映射數學表達式如下
2.1.2 覓食蜣螂改進策略
在覓食過程中,覓食蜣螂位置更新,會根據個體最優解和當前群體最優解來更新自己的位置,但是一旦解陷入局部最優,整個種群就容易進入停滯狀態,所以該算法采用粒子群算法(PSO)對于種群的搜索能力進行增進,避免陷入局部最優。
PSO通過群體中個體之間的協作和信息共享來尋得最優解[17-19]。其數學表達公式為
2.1.3 自適應t分布擾動改進策略
為了避免在迭代過程中陷入局部最優,提出改進方法為自適應t分布擾動改進[20-22]。采用t分布對于蜣螂算法位置進行擾動的數學公式為
2.2 算法性能驗證
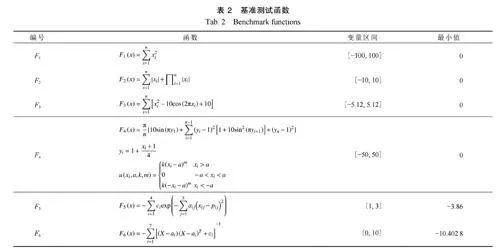
本研究通過選取6個基準測試函數測試改進后的算法性能,其中F1、F2為單峰測試函數,F3、F4為多峰測試函數,F5、F6為固定維度多峰測試函數[23]。基準測試函數如表2所示。
2.3 算法性能對比分析
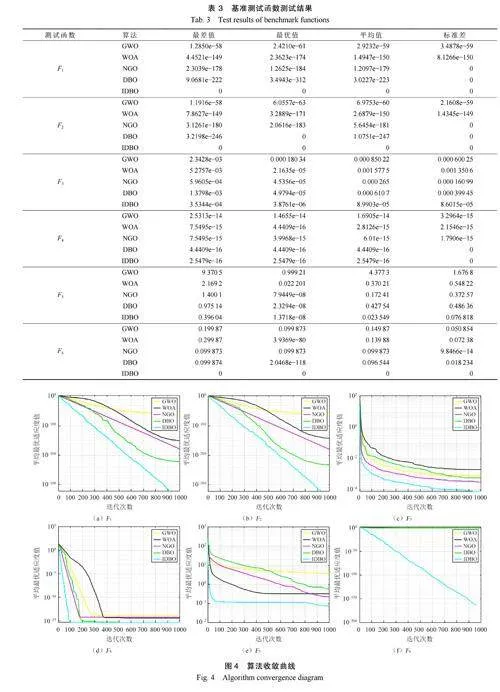
將改進后的算法同原算法、灰狼優化算法(GWO)、鯨魚優化算法(WOA)及北方蒼鷹優化算法(NGO)進行性能比較算法分析,為了保證試驗結果真實可靠,所有算法運行都在同一臺操作系統為Windows10,CPU為IntelCorei5-1050ti的筆記本電腦上完成,使用的軟件為Matlab2022B,每個算法的種群規模設置為POP=30,每個算法的最大迭代次數設置為1000次,每種算法分別在每個測試函數下運行30次,取每個算法的最差值、最優值、平均值和標準差4個參數進行對于算法參數性能的評價,結果如表3和圖4所示。由表3可知,IDBO在F1、F2中標準差與NGO和DBO相等均達到了最優值,其他3項性能指標均優于其他算法,在F4中標準差與DBO相等達到了最優值,其他性能指標均優于其他幾種算法。
由圖4可知,IDBO的迭代曲線相較于其他4種算法明顯下降速度更快,最終結果明顯最優。
綜上所述,IDBO算法相較于其他算法具有更快的收斂速度,更強的局部搜索能力及全局搜索能力,驗證了改進策略的有效性。
3 基于IDBO的PID控制器設計與仿真
3.1 IDBO-PID控制器
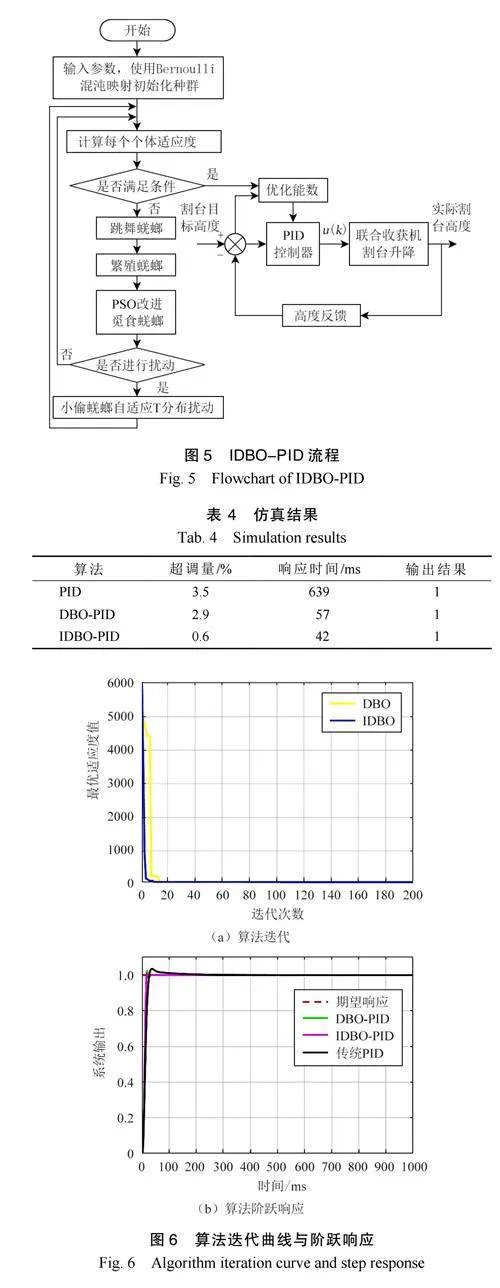
PID的3個參數,對于PID控制器的控制效果及控制精度來說十分重要,為了使PID的3個參數都達到最優值,使用IDBO對3個參數進行尋優處理,IDBOPID算法流程如圖5所示。
3.2 算法仿真分析
由于割臺升降過程可以看作為一個二階彈簧阻尼系統,經查閱資料[24]可知割臺傳遞函數如式(8)所示。
系統選用ITAE作為性能指標,其能很好地檢測系統的響應和性能,在ITAE性能指標下,將IDBO-PID與DBO-PID和PID進行比較分析,其結果如表4所示,收斂曲線和階躍響應曲線如圖6所示[25-29]。
由表4可知,依據人工經驗設置的PID參數的PID控制器超調量雖然與調試前相比減小不少,但是相對于其他兩個算法仍然具有較大的超調量,以及較慢的響應速度。DBO-PID采用的DBO算法完成對PID的3個參數的尋優,相較于傳統的PID而言,DBOPID的超調量較小,響應時間更快,但是相較于IDBOPID,DBO-PID的性能依然較弱,IDBO-PID的超調量幾乎為0,響應速度相較于其他兩個算法也較快。綜上所述,IDBO-PID具有較快的響應速度和較高的穩定性。
由圖6可知,IDBO的響應收斂曲線的下降速度明顯快于DBO響應曲線,并且最終值IDBO強于DBO。傳統PID控制超調量明顯高于其他兩種算法,DBOPID雖然經過DBO算法尋優,但是其超調量與IDBOPID相比依舊高于IDBO-PID。
綜上所述,經過改進后的蜣螂優化算法(IDBO)優化PID控制,具有較快的響應速度和較好的穩定性,符合聯合收獲機割臺控制系統的需求。
4 田間試驗
4.1 試驗條件
為了檢驗聯合收獲機割臺控制系統的性能,本研究于2023年6月15日在山東省青島市即墨區盛發小麥種植合作社進行田間試驗。田間試驗中機器參數與作物信息如表5所示,小麥試驗田如圖7所示。
試驗設備包括兩個慣性測量單元(IMU)、STM32控制器(正點原子,STM32F103)、卷尺、繼電器模塊、秒表及筆記本電腦等。
4.2 割臺響應速度試驗
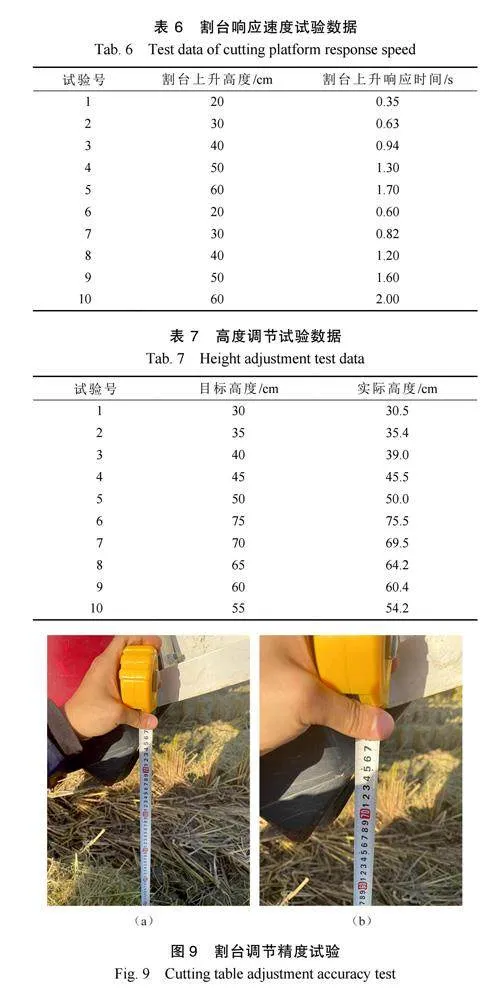
針對聯合收獲機割臺上升和下降兩種情況,分別進行聯合收獲機割臺響應速度試驗。上升和下降分別由上位機設置5組高度數據,每組高度數據的高度變化量為10cm,并采用秒表對聯合收獲機系統響應時間進行測量,如圖8所示,試驗結果如表6所示。
根據GB16151.12—2008的規定,割臺上升速度應≥0.2m/s,下降速度應≥0.15m/s。由表6可知,割臺上升的平均速度0.44m/s,割臺下降的平均速度0.32m/s,割臺上升和下降的平均速度均符合國家標準。
4.3 割臺調節精度試驗
將割臺分為上升和下降兩種情況進行割臺高度調節試驗,分別將上升和下降的目標割臺高度設置為5組不同的數值,當下位機接收到上位機發送的目標高度后,通過控制使割臺穩定后,采取卷尺對于當前割臺離地高度進行測量,如圖9所示,試驗結果如表7所示。
5 結束語
(1)為解決無人農場聯合收獲機在作業過程中,因田間地形起伏不平導致割臺高度測量誤差的問題,本研究提出了一種割臺高度檢測的補償方法。該方法基于兩個傾角傳感器的數據,通過最小二乘法擬合,成功建立了割臺實際傾角與割臺離地高度之間的相關性模型,相關系數高達0.9958。
(2)采用群智能算法優化PID控制的方式解決傳統PID算法控制精度低、響應速度慢及不易調節的問題,針對選取的傳統蜣螂優化算法存在種群良莠不齊、容易陷入最優解、局部搜索能力差等問題,使用Bernoulli混沌映射、粒子群算法(PSO)、t分布擾動等策略對蜣螂優化算法進行改進。通過與其他算法的性能比較分析,驗證了改進后的蜣螂優化算法具有更快的收斂速度和更強的搜索能力。
(3)完成了IDBO-PID控制器的設計,并將其通過仿真與傳統的DBO-PID和PID控制器進行了對比分析。仿真結果清晰地展示了IDBO-PID控制器在響應速度和穩定性方面的顯著優勢,證明了其在控制性能上的顯著提升。
(4)對于聯合收獲機的響應時間和精度進行試驗驗證,試驗結果表明,割臺的響應時間較快,割臺的實際高度與測量高度的誤差均在0.02m以內,滿足無人農場的作業要求。