基于RecurDyn的小型履帶式動力底盤設計與仿真分析
2024-11-05 00:00:00宮慶福宋月鵬郭晶馬偉黃永強王璨任龍龍
農業工程 2024年10期

關鍵詞:丘陵山地;履帶式動力底盤;結構設計;RecurDyn;仿真分析
0 引言
我國的果園種植面積與規模均處于世界前列,是世界上主要的水果生產國之一,果品經濟已經成為實現鄉村振興的重要支柱產業[1]。然而,我國整體農業機械化水平較低,特別是丘陵山地果園機械化處于發展初期階段[2-3]。動力底盤對農業生產、提高生產效益、推動農業現代化等具有重要的意義,尤其是在丘陵山地果園中[4]。相比于輪式動力底盤和仿形動力底盤,履帶式動力底盤對作業環境的適應性更強,轉向靈活,具有較好的機動性,也可以提供更大的接觸面積,減少對地面的沖擊,減少打滑和傾覆的可能性[5]。
國外對履帶式農機研究較早且取得了較多成果。近年來隨著國家政策的大力支持,履帶式農機也成為了我國研究的重點方向。MOCERAF等[6]利用動力學軟件建立了農用履帶車輛的多體動力學模型,并深入研究了其轉彎等運動特性。王鋒等[7]針對南方丘陵果園現有機械通過性差、穩定性不好等問題,研制了一種三角型履帶式動力底盤,可以跨越500mm寬度的壕溝和528mm高度的障礙物。賈鑫等[8]利用動力學RecurDyn仿真模型研究發現軟坡路面環境和履帶車輛轉向性能的關系,為履帶車輛轉向系統設計及其軟坡路面轉向特性分析提供了參考。
現有的履帶式動力底盤以大中型為主,由于丘陵山地果園種植環境較為惡劣、空間郁閉,嚴重降低了丘陵山地果園大中型履帶式動力底盤的作業質量[9]。為解決此問題,本研究設計了一種適用于丘陵山地果園的小型履帶式動力底盤,其爬坡通過性和越障性能良好,進一步提升了我國丘陵山區果園機械化作業的管理水平。
1 設計與分析
1.1 設計要求
丘陵山區地形復雜且環境郁閉,路面環境崎嶇不平,很大程度上降低了大中型農機的適用性,因此本研究基于丘陵山地果園作業環境,設計了一種小型履帶式動力底盤。其具體設計要求有以下4項。
(1)具備較好的爬坡越障能力,在丘陵山地果園作業時具有較好的穩定性,行駛速度0~4km/h,爬坡角度能夠達到30°。
(2)外形尺寸較小,能夠適應北方丘陵果園種植特點,在丘陵果園郁閉的行間作業時,能夠通過1.2m行距的狹小果園空間。
(3)有一定的裝載能力,能夠作為果園采摘田間運輸車使用,整機空載質量≤200kg,滿載質量≤300kg。
(4)能夠掛載其他附屬農機具,如掛載割草機、旋耕機、噴藥機等,降低小型履帶式動力底盤的閑置率,實現一機多用的功能。
1.2 關鍵工作參數設計
1.2.1 行駛速度
小型履帶式動力底盤旨在解決在狹隘郁閉的果園采摘后的人工運輸勞動強度大的問題,根據丘陵山地果園機械作業要求,為了適應環境的變化,最大作業速度設定1.2m/s、初始速度0.2m/s。
1.2.2 履帶選型及參數
目前,常用的履帶式動力底盤類型包括半履帶式和全履帶式。半履帶式動力底盤的設計和制造相對容易且易于維護;全履帶式動力底盤接地比壓較小、具有出色的通過性能及適應復雜作業場地的優勢。在結構上,履帶式動力底盤通常采用普通型、倒梯形型和三角型等不同設計,三角型履帶式動力底盤具有更好的穩定性和良好的越障性能,適應性強[10]。在履帶的材料選擇方面,履帶可分為鏈條式金屬履帶和橡膠履帶,橡膠履帶主要應用在小型農用機械。根據本研究的設計需求,最終選擇全履帶式三角型結構的橡膠履帶。根據設計公式,可以計算履帶的節距、接地長度參數。
在履帶的節距計算中,系數取值15,滿載整機質量取理論最大質量250kg,經過計算可得履帶節距60mm,接地長度700mm。
1.2.3 支撐輪間隙
支撐輪的作用是分散質量、增加穩定性、提高機動性和幫助負載均勻分布。支撐輪的間隙大小對于履帶的受力和行駛穩定性具有影響,支撐輪的間隙值應該盡量避免與履帶節距的整數倍相符[11]。根據經驗公式得
1.2.4 履帶接近角和離去角
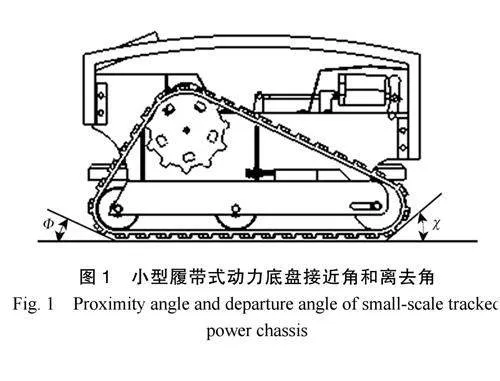
接近角和離去角是主要影響小型履帶式動力底盤通過能力的參數,其角度大小能夠影響其越障性能,因此接近角和離去角不宜過大或者過小,根據經驗設計的小型履帶式動力底盤的接近角χ=45°、離去角Φ=30°,如圖1所示。
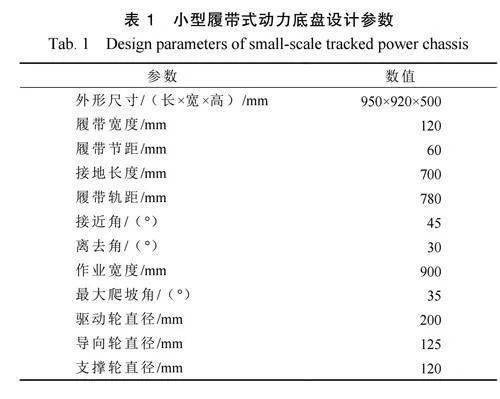
綜合考慮丘陵山地果園環境因素與小型履帶式動力底盤行走的穩定性,確定小型履帶式動力底盤的設計目標與參數。首先,選用Q235合金鋼作為小型履帶式動力底盤主體材料,保證其強度和剛度能夠滿足作業需求;其次,設計的小型履帶式動力底盤越障能力強,機動靈活,可以搭載多種作業屬具。小型履帶式動力底盤的主要設計參數如表1所示。
1.3 動力系統設計與選型
電機在履帶行走動力系統中起關鍵的作用,其性能直接影響車輛的行駛能力和適應性[12]。電機是履帶行走系統的主要動力源,可以提供精確的速度和方向控制,通過調整電機的輸出,作業人員可以精確控制履帶行走系統的運動,使其適應不同的地形和作業需求。本研究選用兩個電機作為小型履帶式動力底盤的動力來源,通過控制電機來實現小型履帶式動力底盤的驅動功能。
小型履帶式動力底盤在丘陵山區的作業環境中,直行、轉向和爬坡是常見的工作狀態,其中在爬坡作業時所需的功率最大,因此,選定電機的功率應基于小型履帶式動力底盤在爬坡行駛中所需的最大功率。在爬坡作業時,小型履帶式動力底盤所需的功率按式(4)計算。
根據設計需求和公式計算,選擇兩臺功率均為1kW的電機提供動力。由于直流無刷電機控制簡單、可調速范圍較廣、啟動時力矩較大、穩定性好且抗干擾能力強,考慮到小型履帶式動力底盤在丘陵山地的工作性能和制造成本,本研究選用功率1kW的兩個直流無刷電機。
2 仿真模型建立與參數設置
2.1 拓撲結構分析
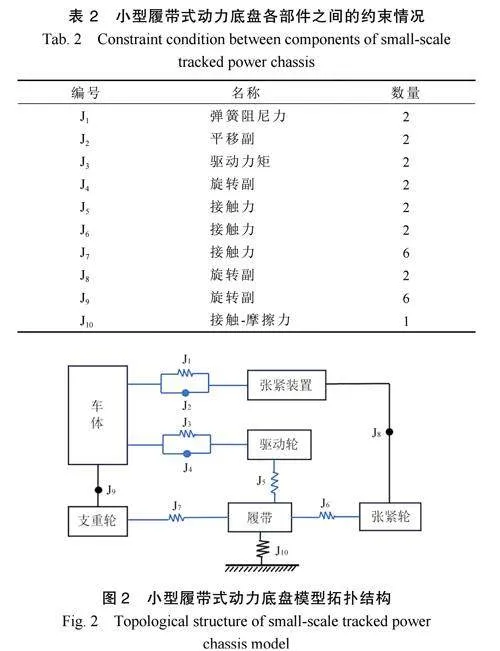
在軟件中對小型履帶式動力底盤建模時,在確定各部件的運動關系與實際作業工況一致的前提下,需要對建立的模型進行簡化以便更快且更準確地進行仿真分析,具體約束關系如表2所示。為了提升模型的仿真解算速度和計算效率,將其余部件與車體整合成為一個整體的剛體系統模型。通過分析小型履帶式動力底盤各組件間的約束及運動關系,構建其模型的拓撲結構,如圖2所示。
2.2 動力學仿真模型構建
利用Solidworks軟件創建小型履帶式動力底盤的三維部件模型,并在RecurDyn軟件中加載這些車體部分的模型。在RecurDyn/Track(LM)環境下,通過參數化方法對履帶、驅動輪、張緊輪及其他輪系組件進行建模和裝配,初步建立了小型履帶式動力底盤的動力學仿真模型,如圖3所示[13]。分析其拓撲結構,設定各部件間的約束及運動關系,合理設置質量特性參數。根據需要進一步調整履帶內部襯套力的剛度和阻尼系數、各部件的摩擦因數,并施加預張緊力,完成履帶式動力底盤的多體動力學模型建立。
2.3 仿真參數設置
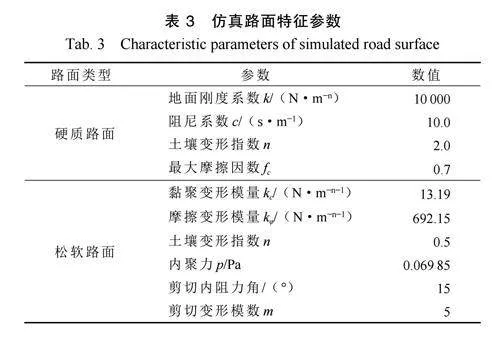
在設計小型履帶式動力底盤時,主要考慮了兩種作業環境:硬質水泥路面和松軟的耕地路面。因此,在RecurDyn中需要設置兩種不同的路面環境來模擬底盤的作業性能,設置的仿真路面特征參數如表3所示。在硬質路面上行駛時,路面不會發生形變,因此可以使用接觸碰撞摩擦模型來模擬作業情況。相反,在松軟路面上行駛時,路面會發生形變,因此需要使用貝克的壓力?沉陷關系模型進行仿真模擬[14]。
在RecurDyn軟件中,為小型履帶式動力底盤添加驅動速度實質上是為驅動輪添加了角速度。因此,在給小型履帶式動力底盤動力底盤添加速度時,需要使用STEP函數進行設值[15]。行駛速度范圍0.2~1.2m/s,在動力學仿真軟件中速度取0.4、0.8和1.2m/s,按照RecurDyn軟件的要求將速度轉換成STEP函數的形式。STEP函數是一個三次多項式逼近階躍函數,其常用表達形式為STEP(x,x0,h0,x1,h1),因此設置的速度在函數中表達為STEP(Time,0,0,3,1.44)、STEP(Time,0,0,3,2.88)、STEP(Time,0,0,3,4.32)。STEP函數的物理意義用數學公式表示為式中 x——時間自變量。
3 仿真結果與分析
3.1 直線行駛側向偏移量
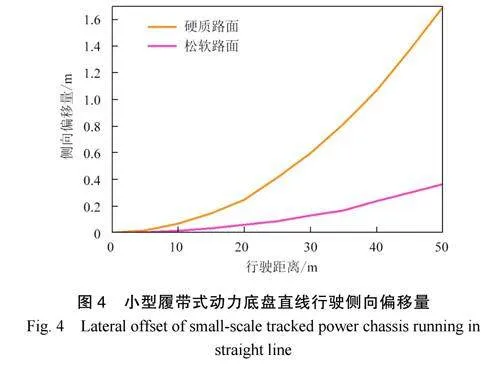
小型履帶式動力底盤分別在硬質、松軟兩種路面環境下以0.8m/s的速度直線行駛,將小型履帶式動力底盤在仿真環境中行駛的數據導出,行駛偏移軌跡曲線如圖4所示。
分析行駛軌跡線可得,當小型履帶式動力底盤在硬質和松軟兩種路面環境下直線行駛50m時,車體的側向偏移量分別為1.692和0.364m,跑偏率分別為3.38%和0.72%。根據GB/T15370.4—2012《農業拖拉機通用技術條件第4部分:履帶拖拉機》的指標要求,拖拉機的跑偏率≤6%。因此,小型履帶式動力底盤在直線行駛時的側向穩定性符合要求。
3.2 縱向坡地行駛性能仿真分析
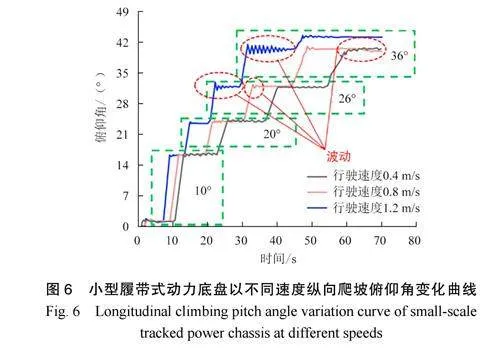
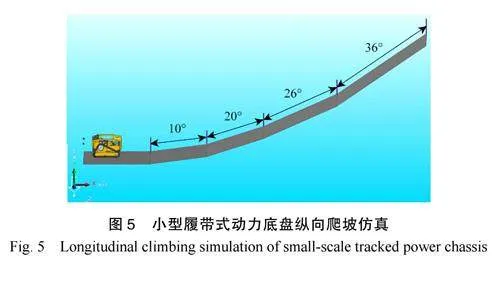
為了驗證小型履帶式動力底盤的爬坡能力,在正常耕地路面環境下設置10°、20°、26°和36°的爬坡角度,分別以0.4、0.8和1.2m/s的速度行駛進行仿真,在Recurdyn中仿真界面如圖5所示。
將小型履帶式動力底盤行駛的數據導出,可以得到其在爬坡行駛過程中俯仰角的變化,如圖6所示。仿真結果分析表明,小型履帶式動力底盤在坡度10°的路面環境行駛時,俯仰角大小基本沒有變化,能夠平穩通過;在坡度20°的路面情況下,能夠平穩通過,俯仰角保持穩定,爬坡性能良好;在坡度26°的路面上以0.8和1.2m/s的速度行駛時,俯仰角會發生突變;在36°的斜坡上行駛時,俯仰角的變化更為顯著,這導致小型履帶式動力底盤的穩定性相對較差,甚至會產生傾翻滑移的現象。
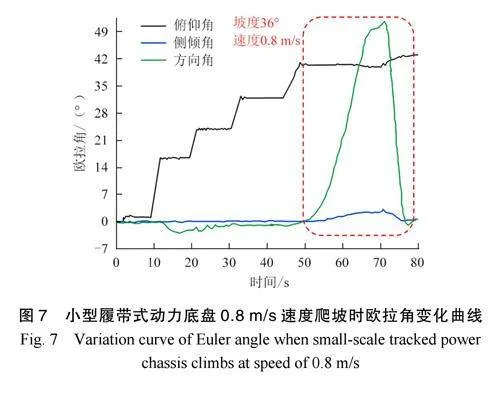
小型履帶式動力底盤以0.8m/s速度行駛時,歐拉角(俯仰角、方向角、側傾角)的變化曲線如圖7所示。小型履帶式動力底盤在10°、20°和26°的斜坡上行駛時,俯仰角和側傾角變化較小,爬坡作業時可以穩定行駛;在坡度10°斜坡行駛時,方向角呈先增大后減小的變化趨勢,隨后恢復穩定;在坡度36°的坡度路面行駛時,方向角會產生突變,側傾角同時也逐漸增大,這表明雖然小型履帶式動力底盤可以通過36°的斜坡,但是不能平穩地通過,因此可以得到設計的小型履帶式動力底盤的最大爬坡角度36°。
3.3 越障通過性仿真分析
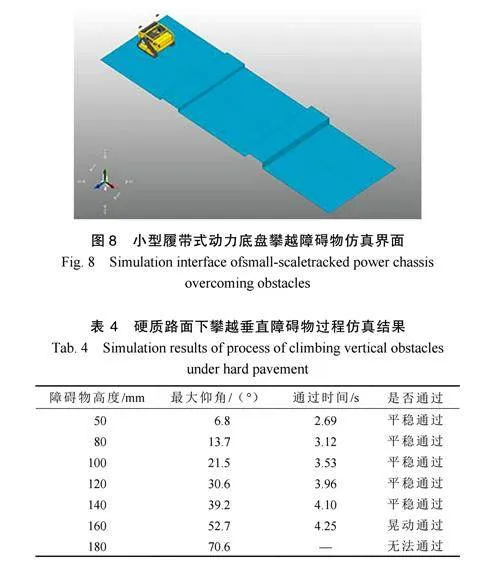
驗證越障通過性對于丘陵山地小型履帶式動力底盤來說非常重要,主要因為這關系到其能否有效、安全地在復雜地形中通過。在丘陵山地果園作業過程中,攀越垂直障礙物是常見的作業環境。良好的越障通過性意味著小型履帶式動力底盤有良好的通過性和對地面環境的適應性,使得其能夠在復雜的地形環境中維持穩定和可控性。在RecurDyn中建立果園硬質路面環境,設置不同高度的垂直障礙物,仿真模擬履帶式動力底盤攀越障礙物的過程,其仿真界面如圖8所示,仿真結果如表4所示。
仿真結果分析表明,小型履帶式動力底盤在硬質路面行駛時可以平穩地通過140mm高度的垂直障礙物;當垂直障礙物高度160mm時,可以晃動通過;當垂直障礙物高度180mm時,無法通過。這說明小型履帶式動力底盤在硬質路面行駛時的極限越障高度為160~180mm。為了準確得到小型履帶式動力底盤的越障能力,不斷降低障礙物的高度,最終可以得到其可以晃動通過170mm高度的垂直障礙物,最大仰角58.6°,越障通過時間4.76s。同理可以得到小型履帶式動力底盤在松軟路面行駛時的極限越障高度185mm。
3.4 跨越壕溝通過性仿真分析
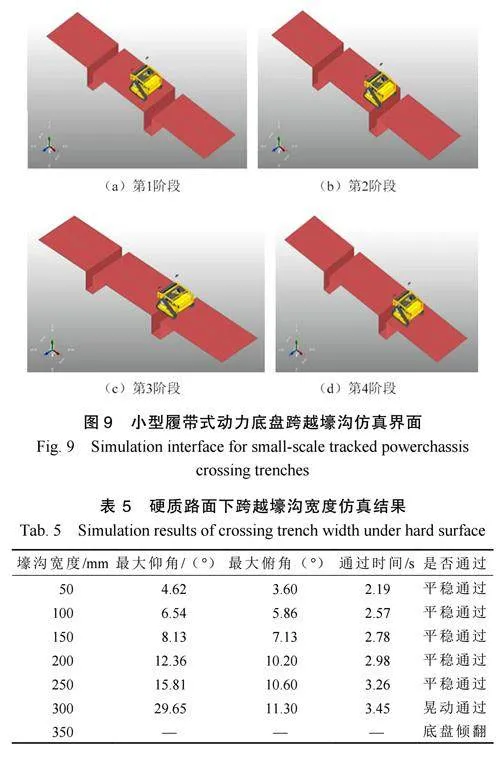
在RecurDyn中建立果園硬質路面環境,設置不同寬度壕溝,仿真模擬小型履帶式動力底盤跨越壕溝的過程,其仿真界面如圖9所示,仿真結果如表5所示。
仿真結果分析表明,硬質路面上,小型履帶式動力底盤可以穩定通過250mm寬度的壕溝;當壕溝寬度增至300mm時,可晃動通過;而350mm寬度的壕溝則無法通過。這表明,在硬質路面行駛時,小型履帶式動力底盤跨越壕溝的極限范圍為250~350mm。為了準確評估其越障能力,將壕溝寬度不斷縮小,最終確定在310mm寬度的壕溝內,小型履帶式動力底盤可以晃動通過,最大仰角36.98°、最大俯角12.6°、越障通過時間3.68s。
同理,可以在RecurDyn中進行仿真分析小型履帶式動力底盤在松軟路面上跨越壕溝的過程。最終結果表明,小型履帶式動力底盤能夠跨越的極限寬度296mm、最大俯角15.6°、最大仰角41.57°。通過與在硬質路面上跨越壕溝的能力進行對比,發現在松軟路面上的跨越能力略遜于硬質路面。這可能是由于松軟路面會增加摩擦阻力,使得小型履帶式動力底盤在跨越壕溝時更容易陷入或滑動,而硬質路面則能提供更好的支撐和穩定性。
4 結束語
本研究對小型履帶式動力底盤的總體結構進行了設計,確定了各部件的參數和行走系統的選型。基于RecurDyn軟件建立了小型履帶式動力底盤與作業路面的多體動力學仿真模型,對小型履帶式動力底盤在直線行駛和爬坡過程進行仿真分析。結果表明,硬質和松軟路面下小型履帶式動力底盤的直線行駛跑偏率分別為3.38%和0.72%,都可以在30°的坡度路面穩定通過,爬坡穩定性較好。
為了得到小型履帶式動力底盤的越障能力,對其分別在硬質和松軟兩種路面環境下的越障過程(翻越垂直障礙物和跨越壕溝)進行仿真分析。結果表明,兩種路況下小型履帶式動力底盤的極限翻越垂直障礙物的高度分別為170和185mm,可跨越壕溝的極限寬度分別為310和296mm,通過仿真分析結果可知,小型履帶式動力底盤的越障能力能夠符合丘陵山地果園作業要求,本研究可以為深入研究小型履帶式動力底盤的行駛特性提供參考。