水上水下一體化測繪關鍵技術研究
2024-12-06 00:00:00葉永玉閆楠楠
中國新技術新產品 2024年15期

摘 要:為了解決獲取水上水下地理信息困難的問題,提高測繪的精度和效率,本文深入研究了水上水下一體化測繪的關鍵技術。通過介紹一體化測繪的基本原理、技術路線和實施方法,提出通過船載激光雷達掃描與激光測距、水上水下一體化數據處理、點云數據去噪、點云分割與測繪實現測繪的新方法。研究結果表明,水上水下一體化測繪技術能夠有效地整合水上和水下的地理信息,提高測繪的精度和效率。同時,該技術還能為地理信息系統提供更加全面和準確的數據支持,為相關領域的科學研究和應用提供有力支持。
關鍵詞:水上水下;一體化;測繪
中圖分類號:P 20" " 文獻標志碼:A
隨著科技的發展和地理信息需求的日益增長,水上水下一體化測繪已成為水域工程建設、環境監測、災害預警等領域的重要技術。水上水下一體化測繪將傳統的大地測繪與水下地形測量相結合,通過綜合運用遙感、全球定位系統(GPS)、聲吶、多波束測量等多種技術手段,對水上水下地形數據進行同步獲取與處理[1]。這種技術不僅提高了測繪的效率和精度,而且為水域環境的綜合評價和利用提供了重要依據。本文將重點探討水上水下一體化測繪的關鍵技術及其應用。
1 船載激光雷達掃描與激光測距
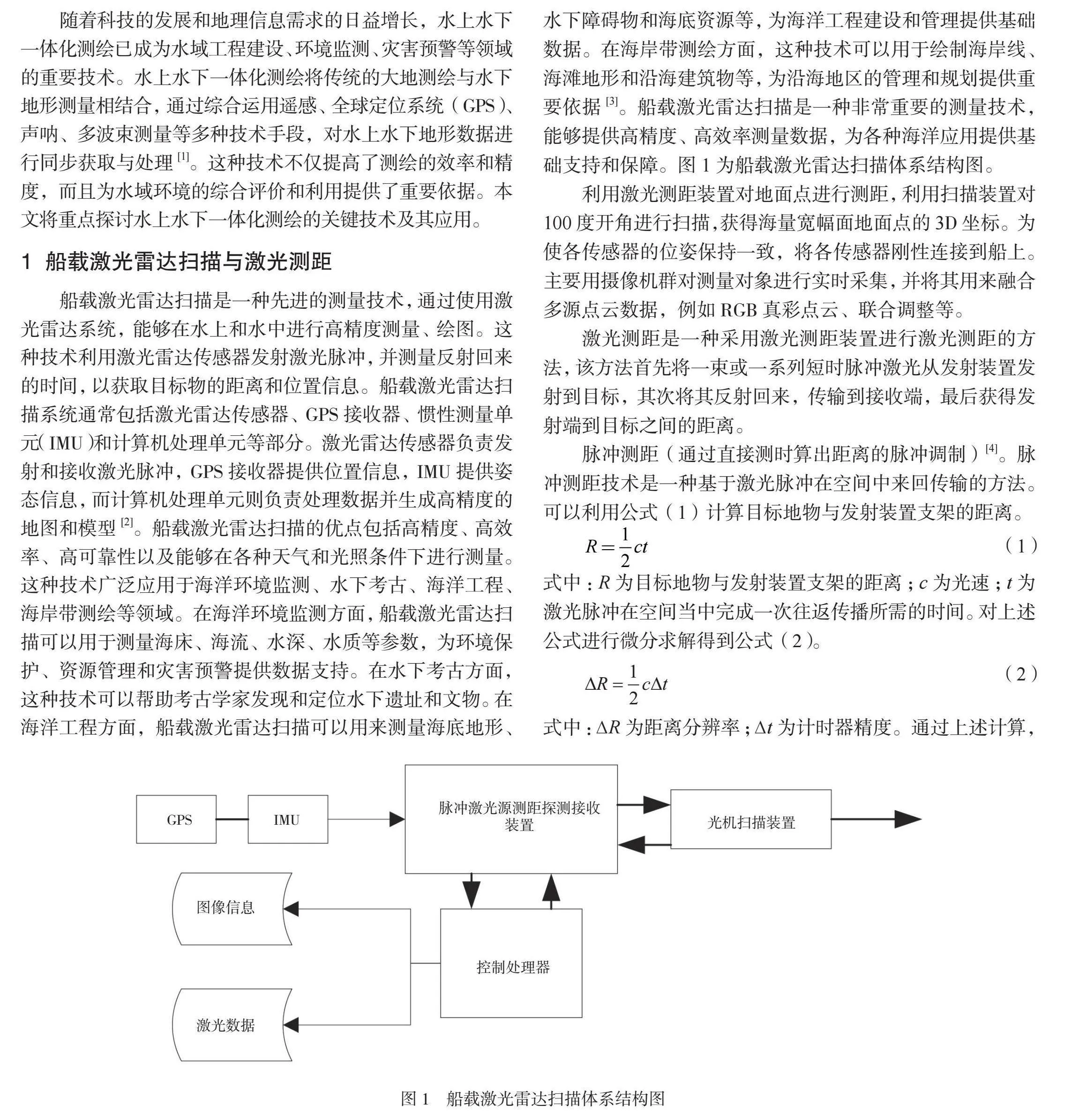
船載激光雷達掃描是一種先進的測量技術,通過使用激光雷達系統,能夠在水上和水中進行高精度測量、繪圖。這種技術利用激光雷達傳感器發射激光脈沖,并測量反射回來的時間,以獲取目標物的距離和位置信息。船載激光雷達掃描系統通常包括激光雷達傳感器、GPS接收器、慣性測量單元(IMU)和計算機處理單元等部分。激光雷達傳感器負責發射和接收激光脈沖,GPS接收器提供位置信息,IMU提供姿態信息,而計算機處理單元則負責處理數據并生成高精度的地圖和模型[2]。船載激光雷達掃描的優點包括高精度、高效率、高可靠性以及能夠在各種天氣和光照條件下進行測量。這種技術廣泛應用于海洋環境監測、水下考古、海洋工程、海岸帶測繪等領域。在海洋環境監測方面,船載激光雷達掃描可以用于測量海床、海流、水深、水質等參數,為環境保護、資源管理和災害預警提供數據支持。在水下考古方面,這種技術可以幫助考古學家發現和定位水下遺址和文物。在海洋工程方面,船載激光雷達掃描可以用來測量海底地形、水下障礙物和海底資源等,為海洋工程建設和管理提供基礎數據。在海岸帶測繪方面,這種技術可以用于繪制海岸線、海灘地形和沿海建筑物等,為沿海地區的管理和規劃提供重要依據[3]。船載激光雷達掃描是一種非常重要的測量技術,能夠提供高精度、高效率測量數據,為各種海洋應用提供基礎支持和保障。圖1為船載激光雷達掃描體系結構圖。
利用激光測距裝置對地面點進行測距,利用掃描裝置對100度開角進行掃描,獲得海量寬幅面地面點的3D坐標。為使各傳感器的位姿保持一致,將各傳感器剛性連接到船上。主要用攝像機群對測量對象進行實時采集,并將其用來融合多源點云數據,例如 RGB真彩點云、聯合調整等。
激光測距是一種采用激光測距裝置進行激光測距的方法,該方法首先將一束或一系列短時脈沖激光從發射裝置發射到目標,其次將其反射回來,傳輸到接收端,最后獲得發射端到目標之間的距離。
脈沖測距(通過直接測時算出距離的脈沖調制)[4]。脈沖測距技術是一種基于激光脈沖在空間中來回傳輸的方法。可以利用公式(1)計算目標地物與發射裝置支架的距離。
(1)
式中:R為目標地物與發射裝置支架的距離;c為光速;t為激光脈沖在空間當中完成一次往返傳播所需的時間。對上述公式進行微分求解得到公式(2)。
(2)
式中:?R為距離分辨率;?t為計時器精度。通過上述計算,實現激光測距。
2 水上水下一體化數據處理
針對船載激光雷達掃描的水上水下一體化數據進行處理。激光雷達數據結構見表1。
針對上述結構的數據,采用C++結合Python編程語言,按照激光數據指定協議解析所需要的各項數據[5]。對三維點云數據進行解析,需要結合空間坐標關系如圖2所示。
在WGS-84坐標系中,激光角可以通過公式(3)轉換坐標。
(3)
式中:RL為瞬時激光束坐標系到激光掃描參考坐標系的旋轉矩陣;RM為激光掃描裝置與傳感器之間的旋轉矩陣;RN為慣性導航參考坐標到當地水平參考坐標系之間的旋轉距離;(x84,y84,z84)為在WGS-84坐標系中的坐標;(xG,yG,zG)為定位中心平面坐標。
當進行數據處理時,為進一步消除安置角的偏差,隨機選取一座中等高程的橋梁,在此基礎上,利用船舶上的移動式激光三維測量技術對被測橋的下表面進行測量,并對其進行兩次掃描,得到對應的位置角誤差[6]。圖3為安置角偏差解算示意圖。
由圖3可知,當存在安置角偏差時,兩次掃描結果將存在一條預期前進方向相同的相交直線,此時安置角的誤差角度如公式(4)所示。
(4)
式中:αM為安置角偏差。在此基礎上,利用最小二乘原理,首先,對同一點進行多次觀測,得到一系列的側偏角誤差參量,其次,利用最小二乘法計算安置角的誤差。最后,將計算的安置角度偏移量輸入定位角度偏移校正程序中,加入點云數據的解算中,若校正后的點云結果良好,則停止校正,反之,則繼續校正。
3 點云數據去噪
當對水上水下一體化進行測繪時,由于各種原因影響,例如人為干擾或掃描設備的局限性,因此所獲取的三維點云數據中可能存在一些噪聲和離群點[7]。這些噪聲和離群點會降低測繪的精度,因此需要對其進行去噪處理。為了實現這個目標,可以利用PCL(Point Cloud Library)點云庫中的pcl:RadiusOutlierRemoval類。這個類可以有效地去除點云中的離群點和噪聲點。
先創建一個對象,并為其指定輸入的點云數據。通過設置一些參數,例如半徑和半徑內點的個數等定義過濾條件。值得注意的是,通常會設定一個半徑閾值,并根據該閾值來遍歷點云數據[8]。在每個點周圍,如果發現半徑內的其他點的數量少于預設的閾值,那么這個點就是離群點或噪聲點,并從點云中移除。
通過這種方式,可以有效地去除點云中的噪聲和離群點,從而提高測繪的精度。這對水上水下一體化測繪來說是非常重要的,高質量的數據是后續分析和應用的基礎。
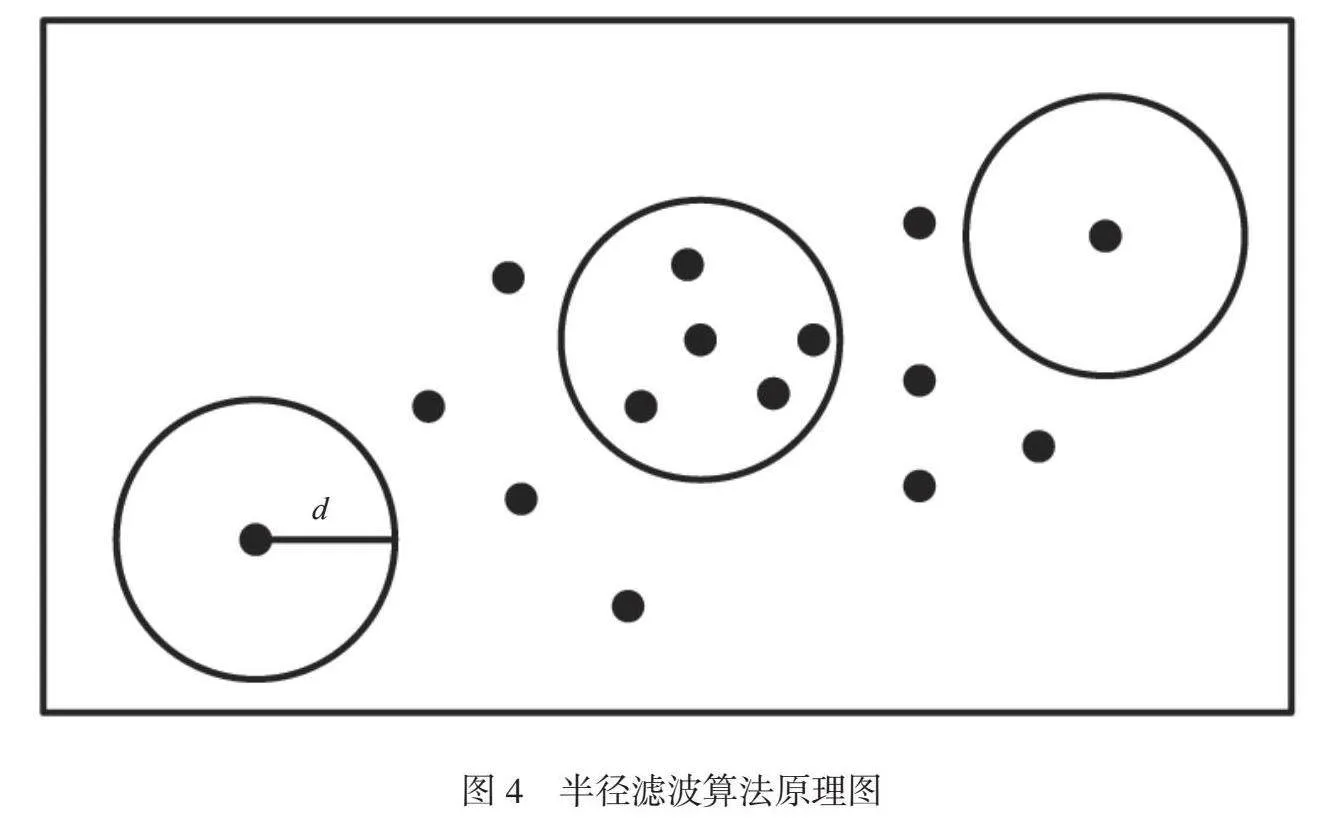
利用半徑濾波器設定半徑閾值,去除位于半徑內小于點數閾值的點,如圖4所示。
按照圖4,通過設定半徑d和半徑內的點數,實現二維點的濾波。例如,當設置的閾值為2時,此時左側圓圈內的點和右側圓圈內的點被剔除。當設置的閾值為5時,此時3個圓圈內的點均被剔除。受陸地、海洋邊界等因素影響的多波束點云數據邊界具有顯著的外差,利用降噪算法徹底去除噪聲點,該方法可以用于多波束信號的自動降噪處理,以提高信號處理的效率。
4 點云分割與測繪
水上水下一體化測繪中的點云分割與測繪是實現高效、高精度測量水域環境的重要環節。點云分割是將獲取的點云數據按照一定的規則和算法進行分類、識別和分割,以區分不同的目標物,例如水面、水下地形、水下障礙物等。將點云數據劃分到存在空間依賴關系的體素中,點云的體素化可以最大程度地保持點云的幾何特性,并可通過3D卷積來處理。利用PointNet模型在原始的三維點云數據上部署深度學習網絡,其關鍵流程如下。
首先,輸入數據對齊。輸入一幀原始點云數據集合,通常表示為一個張量nX3。其中,n代表點云的數量,3則對應每個點的坐標。這些數據會與一個由T-Net學習得到的旋轉矩陣相乘,在具體的空間變換中,保持模型的不變性。
其次,特征提取與升維。經過多層感知機mlp處理,對數據進行特征提取,并將維度升至64。這個過程同樣由T-Net負責數據對齊。
再次,全局特征提取。利用另一層多層感知機mmlp進行特征提取后,通過最大池化操作對特征進行融合,從而生成全局特征。局部與全局特征融合:為了實現語義分割任務,PointNet會將局部特征和全局特征進行疊加。這一步可以保證模型同時捕捉點云數據的局部結構和全局結構。
最后,輸出語義分割結果。經過兩次多層感知機mlp處理后,模型會輸出語義分割后的點云數據。
這種模型結構使PointNet處理點云數據時具有強大的特征捕捉能力和魯棒性,尤其在復雜的3D場景中表現優異。這種結構也為后續的點云處理任務提供了新的思路和方法。
在點云分割后,需要進行測繪,將分割后的點云數據轉換為具體的地理信息,例如地形圖、建筑物模型等。在測繪過程中,需要采用適當的算法和軟件工具,對點云數據進行處理、分析和建模,以獲取準確的地理信息。
在水上水下一體化測繪中,點云分割與測繪的精度和效率直接影響整個測量系統的性能。因此,需要采用先進的算法和技術,提高點云分割與測繪的精度和效率,從而為各種水域環境應用提供準確、可靠的數據支持。
總之,水上水下一體化測繪中的點云分割與測繪是實現高效、高精度測量水域環境的重要環節,需要采用先進的算法和技術,提高點云分割與測繪的精度和效率,為各種水域環境應用提供準確、可靠的數據支持。
5 結論
水上水下一體化測繪技術的應用前景廣泛,不僅可用于海洋資源開發、港口建設、水域環境監測等領域,還可用于海洋科學研究、災害預警與防治等。未來,隨著技術的不斷創新和發展,水上水下一體化測繪將朝著自動化、智能化、精細化的方向發展,為人類探索和利用海洋資源提供更加有力的技術支持。水上水下一體化測繪是目前地理信息獲取的重要手段,對推動海洋資源的合理開發與利用具有重要意義。本文對水上水下一體化測繪的關鍵技術進行深入探討,包括遙感技術、GPS技術、聲吶技術和多波束測量技術等。這些技術應用與發展,將進一步提高水上水下一體化測繪的效率和精度,為海洋工程的建設與管理提供重要的技術支持。
參考文獻
[1]王普生.無人機礦山地質測繪技術在房地一體化測量中的應用[J].世界有色金屬,2023(15):25-27.
[2]孫佳龍.無人機傾斜攝影測量在房地一體化測繪中的應用研究[J].測繪與空間地理信息,2023,46(5):131-134.
[3]范新成,傅玉寧,冉飛.城市級一體化新型基礎測繪生產建設及應用—以臨沂市為例[J].測繪與空間地理信息,2023,46(1):111-114.
[4]江偉偉,魏鵬,高洋.基于新一代測繪技術的水上水下地形一體化測量及庫容測定—以淄博市馬踏湖為例[J].科學技術創新,2022(18):42-45.
[5]武世虎.基于傾斜攝影測量技術在不動產測繪中的實踐分析—以昔陽縣房地一體化項目為例[J].華北自然資源,2022(6):101-103.
[6]許清峰.一體化測繪技術在農村基礎地理信息數據更新中的應用探析[J].農村實用技術,2022(12):120-122.
[7]顧久美,王俊念,楊巖巖.探究無人機載三維激光測繪技術在農房一體化工作中的應用—以某地農房一體化調查項目為例[J]. 房地產世界,2022(22):148-150.
[8]楊溯,陳龍,胡一川,等.基于多傳感器的內陸水域水上水下一體化測繪技術探索[J]. 現代信息科技,2022,6 (12):92-95,100.
猜你喜歡
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
江西建材(2018年4期)2018-04-10 12:37:38
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
中國市場(2016年35期)2016-10-19 02:53:51
成才之路(2016年25期)2016-10-08 10:24:37
成才之路(2016年25期)2016-10-08 10:20:01
環球時報(2016-07-30)2016-07-30 10:14:36
衛星與網絡(2015年12期)2015-10-27 02:21:46
