黃浦江核心區水域陸海空聯動巡航模式研究
2024-12-07 00:00:00魯一帆?郭文強?蘇澤
航海 2024年6期

摘 要:本文以無人機為核心開展討論,研究如何在黃浦江核心區水域建立“陸海空”一體化的水上交通運輸安全保障體系,以提升海事監管的效率與響應能力。針對黃浦江核心區域的通航條件及當前監管體系,探究無人機、巡邏艇與電子巡航系統之間的聯動機制。研究結合潮水巡航、游覽船高峰期巡航、重點護航和應急處置等不同場景的實際應用,提出了具體的聯動操作流程和策略。研究結果顯示,將無人機、巡邏艇與電子巡航系統三者有機結合的聯動模式,極大提升了海事行動的即時響應能力、精確度及工作效率,同時顯著降低了事故發生的概率,進而優化了水域安全管理的整體水平。結論表明,多種巡航技術的協同運用對于黃浦江水域的安全監管能力有著顯著增強作用,為了更充分地發掘新技術的潛力,實現海事監管效能的最大化,該模式仍需在實踐中不斷迭代與優化。
關鍵詞:黃浦江核心區;水上交通安全;聯動巡航;海事監管
中圖分類號:U697.1
文獻標志碼:A
0 引 言
隨著海事領域“革命化、正規化、專業化、職業化”進程的穩步前行,海事監管現代化手段日新月異,其中,輪艇巡航、電子巡航與無人機巡航等多種先進巡航方式已廣泛融入日常。本文聚焦于無人機技術的核心作用,旨在深入剖析如何在黃浦江核心水域實現多樣化巡航模式的高效聯動,從而構建起“陸海空”一體化的水上交通運輸安全保障體系。
1 黃浦江核心區水域通航環境
黃浦江水域,自吳淞口101號燈浮延伸至閔行發電廠,是一條寬度不一、水深不等、彎頭眾多的狹窄水道。航道全長約67 km,江面最寬約800 m、最窄僅約300 m,有9個主要彎道,其中陸家嘴彎道彎度最大,達115°。核心區主要水域自黃浦江上游臨浦輪渡站浦東、浦西碼頭上角連線,下游到楊浦大橋上邊緣線為界,全長10.1 n mile,活動水域交通狀況復雜,客運船舶流量大、彎頭多、支流多、船舶種類繁雜,呈現“五多”特點。
上海港為非正規半日潮,每24 h 50 min出現兩漲兩落,船舶習慣于乘潮航行,漲、落潮轉流前后2 h左右船舶流量很大、密度很高。小型船舶一般在吳淞低潮后、初漲前經吳淞口密集上駛,流量高峰時段持續2~3 h。萬噸級以上的大型重載船舶,一般是乘漲潮流進吳淞口,在平流或初落時抵靠碼頭。夜間游覽高峰時段游覽船碼頭繁忙,2023年暑期,游覽船客運量達100.08萬人次,同比2019年增長13.09%,日均開航84艘次,日均接待游客2.08萬人次;2024年暑期,游覽船日均開航116艘次,日均接待游客2.08萬人次,單日最高載客量達2.99萬人次。
2 現有監管模式
18068863fdbd975ecacd71a53e1d4c7c1)輪艇巡航:海事巡邏艇是海事局的重要巡航工具,可以到達VTS、CCTV、岸基AIS等系統無法覆蓋或到達的水域,受船艇平臺限制,存在建設運維成本高、人力資源占用多、反應速度慢等問題。
2)CCTV視頻監控:CCTV視頻監控是黃浦江內河水域重要的監管手段,視頻探頭包括全景、球機和高變焦探頭,基本可以做到水域全覆蓋,并對指定水域進行監控回放。
(3)船舶交通管理系統:船舶交通管理系統VTS本身集成了船舶自動識別系統(AIS)、雷達等功能信息,加上智慧海事監管平臺的融合,基本實現了“大交管”信息互通共享。
4)無人機巡航:無人機巡航作為現代化新型巡航手段,已經逐步成為巡航的重要力量,具有響應快、范圍廣、能耗低的優勢,配上高倍變焦鏡頭和喊話器,成為立體高空機動監管的最佳選擇。
5)定向喊話:作為傳統甚高頻喊話提醒的有效替代方式,黃浦江核心區增設定向喊話平臺,通過追蹤過境船舶進行定向喊話,加強駕駛員警覺性,一定程度遏制疲勞駕駛事故發生。
3 陸海空聯動巡航場景
無人機在多方面的海事行動中發揮關鍵作用,通過與巡邏艇和電子巡航系統的三方協作,能夠顯著提升海事行動的效率及應急響應的實時性和準確性。這種整合不僅革新了傳統的通航管理模式,還顯著拓寬了無人機在海事監管領域的應用邊界。
3.1 無人機與巡邏艇、電子巡航的三方聯動
(1)場景一:潮水巡航
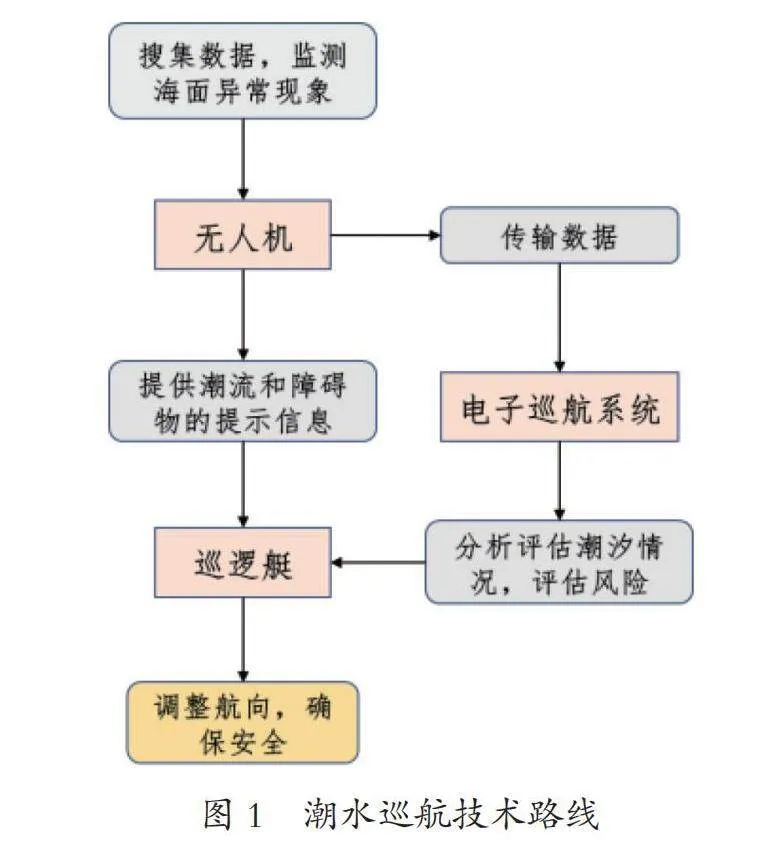
在現代海事運營中,潮水巡航的安全性和效率顯著依賴于先進技術的整合應用。其中,無人機、巡邏艇和電子巡航系統的三方聯動提供了一種創新性的解決方案,如圖1所示。
在此方案中,無人機利用其高空俯瞰的優勢,實時捕捉并監控潮流動態與水文地質狀況,而巡邏艇則依據這些精準信息,靈活調整船舶航行狀態,從而確保水上航行的安全與暢通。電子巡航系統整合來自無人機和巡邏艇的數據,優化巡航路線,實現對復雜海域的有效管理。這一模式不僅顯著提升了航行的安全保障水平,還極大增強了對復雜多變水文環境的應對能力。
具體而言,在航道繁忙的黃浦江區域,潮水巡航的三方聯動操作需要各方分階段分層次地緊密配合:
①無人機作為前線觀察者,承擔著實時數據收集的重要角色。監管部門需規劃無人機執行定期飛行任務,利用機載攝像頭及先進傳感器,精準監測并記錄潮水高度、流速、流向等關鍵數據,迅速捕捉因潮汐變動引發的海面異常情況,同時將這些實時數據同步傳輸至后方的電子巡航系統,以確保信息的即時性與準確性。
②兩級電子巡航系統則作為指揮中心,負責整合來自無人機和巡邏艇的數據,并運用先進的數據處理技術進行分析和決策。電子巡航系統通過分析無人機傳輸過來的數據,并結合歷史潮汐數據和天氣預報,快速預測未來幾小時內的潮汐情況,評估未來的潮水變化和潛在風險,為巡邏艇和無人機提供決策支持,確保各類海事任務的順利進行。
③巡邏艇依據無人機傳輸的實時數據,靈活調整其航行路線,實現動態優化。在接收到來自無人機和電子巡航系統關于潮流和障礙物的提示信息后,巡邏艇可以迅速調整航向,避免潛在的海上風險,確保航行安全。
一般而言,黃浦江潮水為半日潮,保潮為一天兩次,單次時段主要集中在漲水期間的2 h內。結合潮水期間船舶密集程度可將其細分為三個不同的時段。
第一時段:船舶流開始至船舶開始密集時段;
第二時段:船舶流密集時段;
第三時段:其他時段。
其中,密集時段指某個時段的船舶數量與總船舶數量的比例達到60%;較少時段指船舶數量與總船舶數量的比例小于20%。
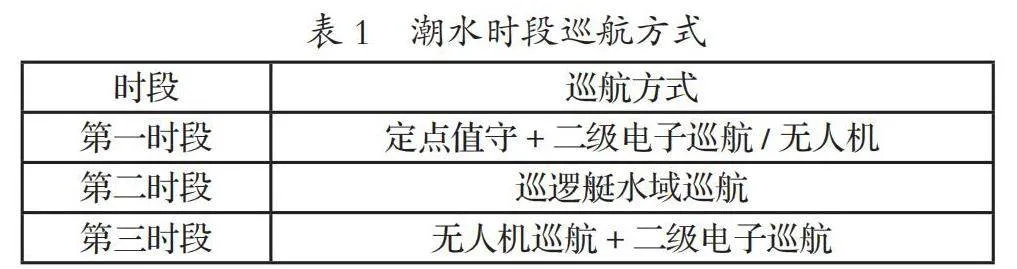
針對不同時段的工作重心差異,可采取多樣化的策略與手段來執行監控巡航工作,見表1。
表1 潮水時段巡航方式
第一時段采用新開河定點值守及二級電子巡航的巡航模式。通過定點值守,可以對特定區域的船舶動態和靜態情況進行精準監控,確保及時發現潛在問題并通報指揮中心。同時,二級電子巡航系統實現了全天候不間斷的監控,極大擴展了監控的覆蓋范圍并提升了監控的準確性。然而,該模式的靈活性較差,難以迅速應對突發狀況,且高度依賴于技術設備,一旦設備出現故障,可能導致監控盲區或信息延遲。
第二時段采用巡邏艇水域巡航的監管模式。巡邏艇的機動性使其能夠根據實時情況調整航線,特別是在掉頭區和彎道等關鍵水域。巡邏艇能夠迅速對現場違規行為采取直接干預措施,及時有效應對各類突發事件,從而顯著提升航道的整體安全水平。然而,巡邏艇的活動范圍有限,難以同時覆蓋整個區域,且需要大量的人力和設備資源,特別是在高峰時段,可能導致資源緊張和管理壓力增大。
第三時段以無人機巡航為主,二級電子巡航為輔。無人機憑借其高速覆蓋大范圍區域的能力,特別適宜在航道相對空閑的時段執行高效且全面的巡航監控任務。無人機懸停范圍應盡量靠近主航道中心線的上空,通過使用語音廣播等手段,監督提醒船舶遵守有關航道、航路、船舶定線制、水上交通管制等規定的情況,重點關注涉客船舶在重點水域的航行狀態,提醒進口船舶注意與河岸兩側保持安全距離,避免出現滯航情況。該模式的運營成本相對較低,但也存在一定的限制,如無人機的續航時間有限,需頻繁更換電池或進行維護,且受天氣條件影響較大;再如無人機巡航高度依賴高精度導航和監控技術,技術故障或信號丟失可能導致監控中斷。
(2)場景二:游覽船高峰巡航
在旅游高峰期,無人機、巡邏艇和電子巡航系統協同工作,是保障游覽船的順暢航行重要手段。無人機進行空中巡視,實時傳送游覽區域的擁堵情況及潛在風險,巡邏艇則根據這些信息快速響應,管理船只流量,指導游覽船合理調整行進路線。后方工作人員將通過電子巡航系統負責資源調度,確保所有船只能夠高效安全運行。
以黃浦江核心段的水運情況為例,在實際的三方聯動中,需要結合通航環境和船舶交通流規律的動態變化,科學分析轄區內的游覽船巡航時段,制定相應地每日“游覽船航班計劃表”巡航方式。
一般而言,工作日內游覽船高峰時段主要集中在1830-2200時。進一步地,結合一天之內的航班密集程度可將其分為三個不同的時段。
第一時段:1830時至航班開始密集時段;
第二時段:游覽船航班密集時段;
第三時段:其他時段。
其中,密集時段指某個時段的航班數量與總航班數量的比例達到60%;較少時段指航班數量與總航班數量的比例小于20%。這一比例的確定可以基于交通流量理論、運輸需求分析和擁擠度與服務水平分析論證得到:
根據交通流量理論,當某個時段的航班數量占比達到60%時,意味著該時段的流量高度集中,表明此時航道正處在交通高峰期,意味著系統內部資源的高強度使用,因此可將其合理地定義為“密集時段”。與此同時,基于運輸需求分析可知,需求的波動性可直接影響航班的分布,高需求時段通常對應著航班數量的集中,當航班占比達到60%時,系統處于高負載狀態,而需求低谷期往往對應著航班數量的顯著減少,當占比低于20%時,系統將處于低負載狀態,故可將其定義為“較少時段”。此外,擁擠度與服務水平分析同樣能夠支持這種劃分,一般而言在高密集度時段,系統容易出現擁堵,服務質量明顯下降的情況,而在較少時段,盡管流量較低,但是系統運轉卻更為順暢,服務質量也相對較高。基于這些理論及實際的現場反饋,在一定程度上證明了使用60%和20%的比例來劃分密集時段和較少時段是科學合理的。
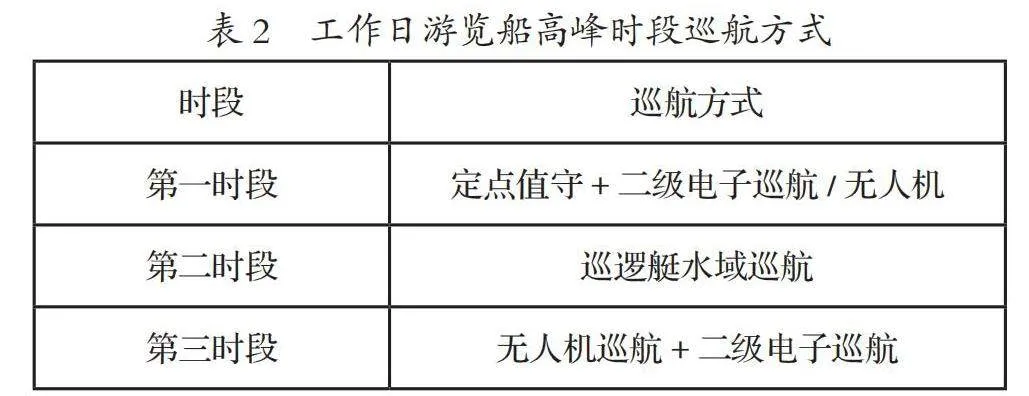
針對各時段的工作重點不同,可以采取靈活多變的策略與方法來執行監控巡航任務,見表2。
第一時段采用新開河定點值守及二級電子巡航的巡航模式,對轄區船舶動態、靜態情況進行持續監控,以“三游一渡”涉客船舶為重點,做好重點監控工作,發現問題及時通報指揮中心。
第二時段采用巡邏艇水域巡航的監管模式,適時調整航線,維護游覽船、游艇安全航行,重點加強掉頭區以及涉客船舶碼頭前的水域掉頭和靠離泊的秩序管理。
第三時段以無人機巡航為主,二級電子巡航為輔。無人機懸停范圍應盡量靠近主航道中心線的上空,通過使用語音廣播等手段,監督提醒船舶遵守有關航道、航路、船舶定線制、水上交通管制等規定的情況,重點關注涉客船舶在重點水域的航行狀態,提醒涉客船舶注意與河岸兩側保持安全距離,避免出現滯航情況。
遇到雙峰疊加的情況,巡邏艇要全程出動,在三號掉頭區、十六鋪與南浦大橋附近做好掉頭區以及靠泊碼頭的維護。
(3)場景三:重點護航
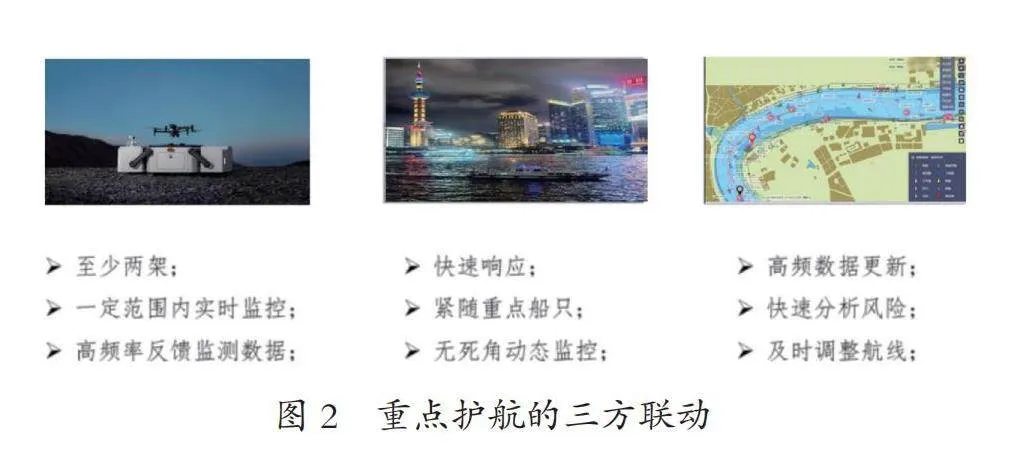
在重要航道或關鍵時期的重點護航中,三方聯動尤為重要。無人機在空中執行監控任務,迅速覆蓋遼闊海域,實時偵測并精準識別一切潛在威脅。巡邏艇則依據無人機提供的即時信息,迅速做出反應,實施精確有效的干預或攔截行動。電子巡航系統則在整個過程中提供指揮和控制支持,優化護航策略,確保行動的高效和安全,見圖2。
對于重點護航的船只,在采取三方聯動措施的過程中,要能夠實現不同機動裝備的之間有效互動及實時監控。對于重要商船或旅游船的安全重點護航,需要海事部門在執行相應任務的過程中及早發現潛在的威脅和風險,并提前做好規劃措施。
①對于無人機而言,一般建議至少部署2架,以保證能夠對船只前進方向的5 n mile及左右3 n mile范圍內的實時空中監控。對于特殊的危險情況,如檢測到未經授權的船只存在異常活動時,無人機應即時發送實時圖像和位置數據,確保護航行動的先發制人和信息準確性。無人機能夠在空中持續監控,實時捕捉航道上的動靜,確保任何異常情況都能在第一時間被識別并上報,支持其他聯動裝備的快速決策和行動。然而,無人機的續航時間存在局限性,需要頻繁更換電池或充電,這在執行長時間護航任務時構成了制約。此外,無人機的操作易受到天氣狀況的干擾,諸如大風、大雨等惡劣天氣條件會削弱其飛行穩定性并降低監控效能。無人機還高度仰賴導航與通信技術,一旦這些設備發生故障或信號傳輸遭遇中斷,將會直接導致監控活動中斷或數據傳輸延遲,進而可能對整個護航行動的連貫性和效率產生不利影響。
②巡邏艇應在接收到威脅警報后的5分鐘內作出響應,并立即到達可能的威脅區域,進行針對性的干預或攔截,提供及時的保護。條件許可的情況下,需在重要船只周圍配備巡邏艇,確保無死角監控,以便有效實施威懾和防御。盡管巡邏艇具有較強的機動性,但其實際覆蓋范圍相對有限,尤其是在面對廣闊海域的護航任務時,難以獨立完成全面的監控工作,需要配合無人機等裝備進行聯動。此外,巡邏艇的運行需要大量的人力和物資支持,長時間的高強度任務可能導致資源消耗過大,尤其是在高風險的護航任務中,可能會使巡邏艇的可用性受到限制。
③電子巡航系統則需保持高頻率的數據更新,及時更新航行狀況,分析潛在風險并提供航線調整建議,根據實時情況快速調整重要船只的航行路徑。電子巡航系統在護航過程中充當了指揮中樞的角色,能夠實時監控全局,協調無人機和巡邏艇的行動,確保護航行動的統一性和高效性。同時,系統可以根據實時情況迅速調整護航策略,靈活應對突發事件。由于電子巡航系統依賴于高效的通信網絡和精準的數據傳輸,任何通信故障或數據延遲都可能影響決策的及時性和準確性,進而影響整個護航行動的成效。因為需要整合多方數據并進行實時分析,電子巡航系統的操作復雜性較高,要求操作人員具備較強的技術背景和應急處理能力,否則在緊急情況下可能導致反應不夠迅速。
(4)場景四:應急處置
在緊急狀況下,無人機的迅速部署能力顯得尤為重要。它能夠即刻抵達事故現場,迅速執行空中偵察任務,并將圖像和數據實時反饋。巡邏艇依據這些信息迅速定位并執行救援。電子巡航系統則進行后勤支持,優化救援行動,并實時監控救援區域的其他船只和潛在障礙,提高救援成功率。在資源和人力相對有限的情況下,合理利用無人機能夠大幅度提高救援行動的效率,并有效減輕巡邏艇在人力成本方面的負擔,見圖3。
在接到報警后,海事局應立即部署無人機,并爭取在最短的時間飛達事故現場。基于無人機自身配備的專業監測設備,如紅外線和光學攝像頭,使得其能夠在夜間或惡劣天氣條件下都能進行有效監測借助無人機能夠迅速對事故區域實施空中偵察,實時傳輸事故現場的高清畫面、精確位置以及周邊海域的環境狀況。同時,無人機還能密切監測并記錄海上風速及流向,為后續災害處置工作提供堅實有力的信息支撐與決策依據。
其次,根據無人機提供的精確坐標,巡邏艇能夠快速移動到指定位置,并提前攜帶必要的災害應急處置設備,用于事故現場的救援和處置,同時根據無人機提供的動態信息調整救援策略,盡可能降低事故災害的風險程度。
而電子巡航系統作為指揮控制中心,將會實時接收并分析來自無人機和巡邏艇的數據。系統利用先進的算法,模擬追蹤海上事故的危險程度和影響范圍,制定相應的救援方案。
4 結 語
隨著交通強國建設不斷推進,新技術、新手段的不斷應用,“陸海空”一體化水上交通運輸安全保障體系和全要素水上“大交管”的時代已經來臨,但對于多種可用監管手段的模式切換才剛剛起步,如何最大化利用新科技、發揮最大監管效能,需要在實踐中不斷總結探索更為完善高效的切換模式,才能更有效地發揮海事監管職能,維護水上安全環境。
參考文獻
[1] 毛俊遠,單瑞海,喬國棟,等.無人機技術在海事監管領域應用研究[J].中國海事,2024,(05):9-11.DOI:10.16831/j.cnki.issn1673-2278.2024.05.003.
[2] 郝勇,李翌陽,陳仕祥,等.電子巡航系統信息特征及在海事監管中的應用[J].中國航海,2014,37(01):11-15+47.
[3] 李培嫻,楊錦東.立體監管模式下海事巡邏船信息系統建設思路及發展方向[J].水運工程,2016,(S1):112-115.DOI:10.16233/j.cnki.issn1002-4972.2016.s1.025.
[4] 程邁,吳建軍,張鼎橋,等.海事管理機構數字化轉型淺析[J].水運管理,2024,46(04):17-19.DOI:10.13340/j.jsm.2024.04.011.
[5] 成旭,蔡宏偉,張衛星,等.網格化海事動態監管模式下的船舶交通管理[J].中國航海,2012,35(04):90-95.
[6] 朱加高,陳建華.VTS的效用及中國VTS管理現狀[J].大連海事大學學報,2008,34(S1):30-33.DOI:10.16411/j.cnki.issn1006-7736.2008.s1.013.
作者簡介:
魯一帆,黃浦海事局外灘海巡執法大隊四級主辦,15175729215
蘇澤,黃浦海事局外灘海巡執法大隊四級主辦,18635580711
郭文強,黃浦海事局外灘海巡執法大隊一級行政執法員,15221001319
