機器蜜蜂嗡嗡飛
2010-05-30 16:39:01編譯/立新
新民周刊 2010年17期
編譯/立新
不出幾年,圍著花朵團團轉的不僅是蜜蜂還有機器蜜蜂。
對于勤勞的小蜜蜂,幾乎人人稱頌。它們嗡嗡地飛來飛去忙碌不停,它們傳授花粉,使花兒鮮艷,果實累累;它們采蜜釀蜜,不僅自給還可供人食用。它們是這樣地富有團隊精神:工蜂擔負采集花粉的職責,乳母蜂細心照料其幼蟲,雄蜂不時地在嗡嗡叫,它非常明白自己肩負的傳播種群的使命,而每一只幼蟲都努力地在母蜂照料下確保自己茁壯成長。
但越來越不容樂觀的自然環境顯然也正在威脅著蜜蜂們的生活。在美國,每年有36%的蜂巢受到病菌的侵襲而死亡。改善自然環境,幫助更多的蜜蜂擺脫病菌,這是環保專家和昆蟲專家的事,哈佛大學的兩位電氣工程師伍德和衛古依琢磨的是如何替補大量死亡的蜜蜂,完成它們的任務,并更好更多地為人類工作。羅布?伍德已經研制出了杏仁大小的機器蒼蠅,他正在研制一隊能自動飛行的“蜜蜂”,每一只都能執行獨特的任務,衛古依對伍德說:“如果你能制造蜂體,我就能配以大腦。”他要設計的機器蜜蜂攜帶的微處理器。如今他們研制的RoboBee能像真的蜜蜂一樣升空、懸停。兩位工程師還招募了各路專家共同研發這一項目,他們招募了幾位生物學家做顧問,了解蜜蜂的行為舉止、飛行習性,確定制作的材料,其他科技人員協作他們研制出一種小型可再充電的燃料電池,計算機科學家則參與編制軟件。目前這個研制團隊已經獲得了美國國家科學基金會1000萬美元的撥款,用以建立一個自主的蜜蜂網絡系統。
研發小組期望在5年中能制造出數十個RoboBee,它們能像真正的團隊那樣相互協調著進行飛行,懸掛著傳授花粉。科學家們還希望人造蜜蜂能神通廣大,它可以監測城市道路的環境污染狀況,可在災害現場如地震災區被用來搜尋罹難者及幸存者的受傷人員。科學家們認為,RoboBee成功與否的關鍵是它們之間能否進行圓滿的配合合作。
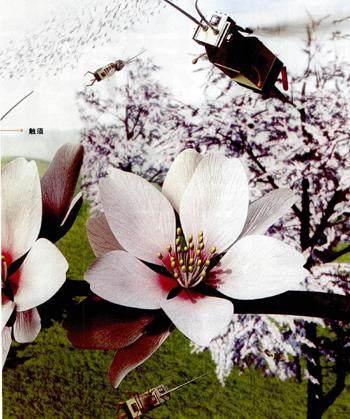
RoboBee在花圃傳授花粉
第一步,建立活動管理中心:建立一個可移動的機器蜜蜂“蜂巢”。
第二步,調查統計地貌景觀:先由擔任偵察任務的RoboBee外出,利用它們身上的紫外線傳感器仿效真蜜蜂的尋找模式來定位花瓣。它頭上的攝像機將記錄其所處的地標,供工作人員判斷它們離蜂巢有多遠。
第三步,制作地圖:偵察后返回基地的人造蜜蜂先進行燃料電池再充電,然后上傳花圃的確切位置于中央電腦,數十只返回蜜蜂所傳遞的信息可將花圃的位置逐一映射在地圖上。
第四步,傳授花粉:有全套裝備,配有少量傳感器及較大的燃料電池的“工蜂”開始外出長途飛行,到達指定地點后,其頭部直接對著花兒將花粉從這朵花傳遞到另一朵花瓣上。
RoboBee的解剖圖:
大腦:腦內簡單的電路就可駕輕就熟地操縱蜜蜂的基本運作,包括保持平衡的飛行和懸停、升騰,再由一個微處理器來管理其高水準的作業,還可處理來自傳感器的資料數據。
眼睛:紫外線傳感器能仿效天然紫外線進行掃描,數碼相機能跟蹤RoboBee下方的物體,并測定它的飛行速度和已飛距離,傳感器跟著太陽的位置可告知它飛行的方位。
蜂翼:通過一個致動器來振動它兩瓣由碳纖維制成的輕量級翅膀。
觸須(天線):RoboBee在飛行中可通過這兩根像觸須避免相互碰撞或撞到其他物體。
腿:三叉齊下的腳是用來插入并鎖定對接站點,用來給微型燃料電池充電,并上輸傳感器的數據至計算機內,三叉腿還能協助抓取花兒上的花粉。
