右美托咪定在TURP手術(shù)麻醉中效果及對認(rèn)知功能的影響
2023-09-29 03:33:35蘇東文
基層醫(yī)學(xué)論壇 2023年5期
蘇東文
【摘要】? 目的? ? 探究經(jīng)尿道前列腺電切術(shù)(TURP)麻醉中右美托咪定的應(yīng)用效果及對認(rèn)知功能的影響。方法? ? 選取2016年9月—2019年5月在惠州市第六人民醫(yī)院行TURP手術(shù)的115例患者作為研究對象,以隨機(jī)數(shù)字表法分為2組,2組患者均行全身麻醉,麻醉誘導(dǎo)前給予甲組患者靜脈泵注右美托咪定,給予乙組患者等量生理鹽水。對比2組手術(shù)不同時間點心率(HR)、平均動脈壓(MAP)變化情況,采用簡易精神狀態(tài)量表(MMSE)對2組認(rèn)知功能進(jìn)行評價,對比術(shù)后認(rèn)知功能障礙(POCD)發(fā)生情況。結(jié)果? ? 2組T0、T2、T3時的HR與T0時的MAP比較,均無明顯差異(P>0.05);甲組T1時的HR與T1~T3時的MAP均小于乙組(P<0.05)。與術(shù)前比較,2組術(shù)后1 d、3 d時MMSE評分均有所降低,但甲組高于乙組(P<0.05)。甲組術(shù)后1 d、3 d時POCD發(fā)生率均低于乙組(P<0.05)。結(jié)論? ? TURP手術(shù)麻醉中應(yīng)用右美托咪定對患者術(shù)后認(rèn)知功能的影響小,利于降低術(shù)后POCD發(fā)生率。
【關(guān)鍵詞】? 經(jīng)尿道前列腺電切術(shù);麻醉;右美托咪定;認(rèn)知功能;影響
中圖分類號:R614.2+4? ? ? ? 文獻(xiàn)標(biāo)識碼:A
文章編號:1672-1721(2023)05-0055-03
DOI:10.19435/j.1672-1721.2023.05.019
良性前列腺增生(BPH)是一種老年男性高發(fā)疾病,隨著人口老齡化進(jìn)程不斷推進(jìn),發(fā)生率明顯提高。病因與上皮細(xì)胞、間質(zhì)細(xì)胞增殖、凋亡平衡被破壞,以及遺傳、神經(jīng)遞質(zhì)、炎癥細(xì)胞、生長因子、腺上皮細(xì)胞與前列腺間質(zhì)之間的相互作用,雌激素與雄激素之間的相互作用等相關(guān)。目前已知BPH必須具備年齡增長、有功能的睪丸兩個條件,近年來逐漸重視地理環(huán)境、人種、家族史、酗酒、肥胖以及吸煙等因素和BPH發(fā)生之間的相關(guān)性。經(jīng)尿道前列腺電切術(shù)(TURP)是臨床常用手術(shù)方式,具有操作簡單、手術(shù)創(chuàng)傷小以及手術(shù)療效確切等諸多優(yōu)點[1]。雖然該手術(shù)方式的優(yōu)勢明顯,但術(shù)后認(rèn)知功能障礙(POCD)為不容忽視的一大問題。POCD是指術(shù)后出現(xiàn)一系列中樞神經(jīng)系統(tǒng)功能異常情況,包括記憶、認(rèn)知以及意識等方面的暫時性功能障礙,嚴(yán)重情況下甚至?xí)l(fā)老年癡呆,屬于一種常見且嚴(yán)重的老年術(shù)后并發(fā)癥[2]。右美托咪定具有鎮(zhèn)靜、抗焦慮等諸多作用,基本上不會造成呼吸抑制,近年來其神經(jīng)保護(hù)作用備受臨床關(guān)注[3]。但該藥物屬于一種麻醉誘導(dǎo)前的輔助用藥,是否會影響術(shù)后認(rèn)知功能,臨床尚未出現(xiàn)統(tǒng)一結(jié)論。本研究分析了TURP手術(shù)應(yīng)用右美托咪定的效果及對患者認(rèn)知功能的影響,報道如下。
1? ? 資料與方法
1.1? ? 一般資料? ? 選取2016年9月—2019年5月在惠州市第六人民醫(yī)院行TURP手術(shù)的115例患者作為研究對象,納入標(biāo)準(zhǔn):(1)知情同意;(2)不存在TURP手術(shù)禁忌證;(3)美國麻醉醫(yī)師協(xié)會(ASA)分級為Ⅰ~Ⅱ級。排除標(biāo)準(zhǔn):(1)存在麻醉禁忌證;(2)伴精神系統(tǒng)疾病;(3)嚴(yán)重竇性心動過緩與傳導(dǎo)阻滯;(4)藥物濫用史。以隨機(jī)數(shù)字表法將患者分為2組。甲組57例,男39例,女18例,年齡62~75歲,平均年齡(68.96±3.28)歲,體重46~74 kg,平均(62.15±3.69)kg。乙組58例,男41例,女17例,年齡60~73歲,平均年齡(68.92±3.25)歲,體重47~73 kg,平均(62.11±3.63)kg。2組基礎(chǔ)資料差異無統(tǒng)計學(xué)意義(P>0.05)。
1.2? ? 方法? ? 2組患者術(shù)前均保持6 h禁飲、12 h禁食,入室后快速開放靜脈通道,對心率、血壓等進(jìn)行密切監(jiān)測,麻醉誘導(dǎo)前給予甲組患者靜脈泵注0.5 μg/kg右美托咪定(宜昌人福藥業(yè)有限責(zé)任公司,國藥準(zhǔn)字H20183390,規(guī)格2 mL/200 μg),15 min之后改為持續(xù)泵注,泵注速度控制為0.2 μg/(kg·h),一直到結(jié)束手術(shù)前半小時,采用相同方式給予乙組患者靜脈泵注等量生理鹽水。給予患者靜脈注射0.2~0.3 mg/kg順式阿曲庫銨(浙江仙琚制藥股份有限公司,國藥準(zhǔn)字H20090202,規(guī)格5 mg)、0.2 mg/kg依托咪酯乳劑(江蘇恒瑞醫(yī)藥股份有限公司,國藥準(zhǔn)字H32022379,規(guī)格10 mL/20 mg)、3 μg/kg芬太尼(國藥集團(tuán)工業(yè)有限公司廊坊分公司,國藥準(zhǔn)字H20123297,規(guī)格2 mL/0.1 mg)、0.03 mg/kg咪達(dá)唑侖(江蘇恩華藥業(yè)股份有限公司,國藥準(zhǔn)字H20143222,規(guī)格10 mL/50 mg)誘導(dǎo)插管,連接麻醉機(jī),行間歇正壓通氣,術(shù)中將呼氣末二氧化碳分壓(PETCO2)控制在35~45 mm Hg之間,同時術(shù)中給予患者50~80 μg/(kg·h)瑞芬太尼(江蘇恩華藥業(yè)股份有限公司,國藥準(zhǔn)字H20143315,規(guī)格1 mg)、4~6 mg/(kg·h)丙泊酚(西安力邦制藥有限公司,國藥準(zhǔn)字H20010368,規(guī)格10 mL/100 mg)微量泵輸注,根據(jù)實際情況給予患者順式阿曲庫銨靜脈注射,以此來維持麻醉,結(jié)束手術(shù)后將患者送入麻醉恢復(fù)室進(jìn)行監(jiān)護(hù),等到麻醉蘇醒之后方可拔管。
1.3? ? 觀察指標(biāo)? ? (1)對比2組患者氣管插管前(T0)、氣管插管即刻(T1)、手術(shù)開始時(T2)、手術(shù)開始30 min(T3)時的心率(HR)與平均動脈壓(MAP)。(2)分別在術(shù)前1 d、術(shù)后2 d、術(shù)后3 d采用簡易精神狀態(tài)量表(MMSE)評分對2組患者認(rèn)知功能進(jìn)行評價,27~30分提示正常,27分以下提示為POCD[4]。(3)對比2組術(shù)后1 d、3 d時的POCD發(fā)生情況。
1.4? ? 統(tǒng)計學(xué)方法? ? 采用SPSS 20.0統(tǒng)計學(xué)軟件分析數(shù)據(jù),計量資料以x±s表示,予t檢驗,計數(shù)資料予χ2檢驗,P<0.05為差異有統(tǒng)計學(xué)意義。
2? ? 結(jié)果
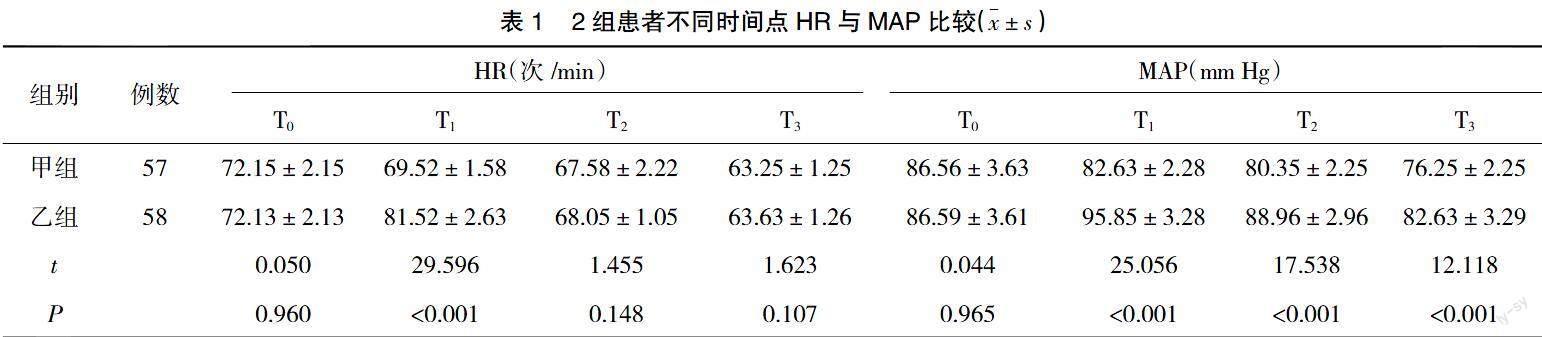
2.1? ? 不同時間點的HR與MAP? ? 2組T0、T2、T3時的HR與T0時的MAP比較,均無明顯差異(P>0.05);甲組T1時的HR與T1~T3時的MAP均小于乙組(P<0.05),見表1。
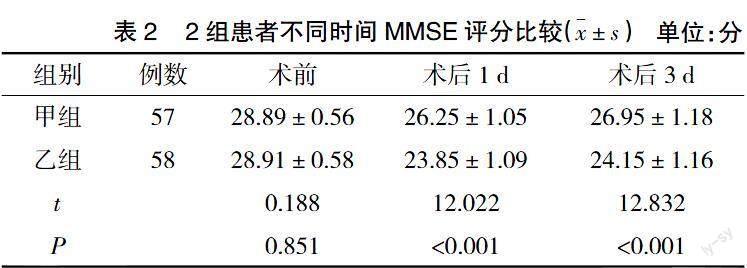
2.2? ? 不同時間的MMSE評分? ? 2組術(shù)前MMSE評分差異不明顯(P>0.05);與術(shù)前比較,2組術(shù)后1 d、3 d時MMSE評分均有所降低,但甲組高于乙組(P<0.05),見表2。
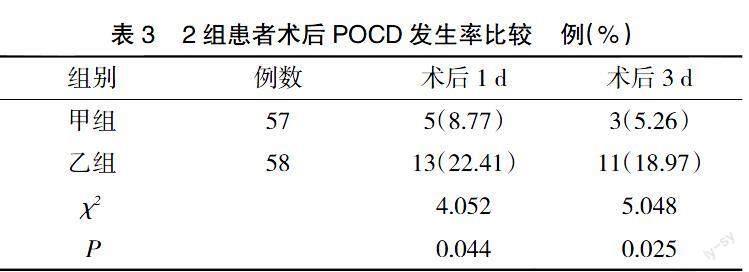
2.3? ? 術(shù)后POCD發(fā)生率? ? 甲組術(shù)后1 d、3 d時的POCD發(fā)生率均低于乙組(P<0.05),見表3。
3? ? 討論
認(rèn)知是人腦接受外界信息,經(jīng)加工處理之后轉(zhuǎn)換成為內(nèi)在的心理活動,進(jìn)而獲取或者應(yīng)用知識的過程,包括理解判斷、計算、執(zhí)行、視空間、語言以及記憶等多方面。認(rèn)知功能障礙(POCD)是指以上幾項認(rèn)知功能中的一項或者多項受損,并對個體的社會能力或者日常生活能力產(chǎn)生影響。研究資料顯示,麻醉手術(shù)后出現(xiàn)POCD的患者并不少見,老年人發(fā)生率更高。可分為輕度、中度與重度POCD,其中輕度POCD是指輕度記憶損害,對指令反應(yīng)出現(xiàn)功能障礙,處于輕度認(rèn)知異常狀態(tài);中度POCD是指出現(xiàn)較為嚴(yán)重的記憶缺失情況,健忘綜合征;重度POCD是指出現(xiàn)嚴(yán)重記憶損害,人格發(fā)生改變,喪失語言概括能力與判斷能力。行TURP手術(shù)治療的患者大多為老年人,各項器官功能明顯衰退,機(jī)體抵抗力低下,術(shù)后POCD發(fā)生風(fēng)險更高[5]。現(xiàn)階段,臨床多數(shù)研究認(rèn)為POCD的出現(xiàn)可能和以下因素相關(guān):(1)患者因素。患者受教育程度、年齡、心理健康程度均是導(dǎo)致POCD發(fā)生的重要影響因素。隨著年齡增長,機(jī)體各項器官也逐漸衰老,甚至?xí)霈F(xiàn)退行性病變或者病理性病變,而認(rèn)知補(bǔ)償與認(rèn)知表現(xiàn)會隨著年齡增長而有所下降,都可能是促成POCD發(fā)生的重要原因。除此之外,受教育程度也和POCD之間存在一定相關(guān)性,這可能是因為受過教育的人大腦相對發(fā)達(dá),神經(jīng)元儲備和突觸激活能力、大腦活動性均優(yōu)于受教育程度低者,故POCD發(fā)生率更低。還有研究顯示,與正常人比較,患有腦損傷、阿爾茨海默癥的患者POCD發(fā)生率更高。(2)手術(shù)麻醉因素。隨著手術(shù)復(fù)雜性增加與手術(shù)持續(xù)時間延長,POCD發(fā)生率也會提高。這可能是因為長時間的復(fù)雜性手術(shù)方式會促進(jìn)內(nèi)毒素大量釋放,并進(jìn)一步刺激白細(xì)胞,促使白細(xì)胞介素在全身炎癥反應(yīng)過程中發(fā)揮重要參與作用。麻醉本身對認(rèn)知功能產(chǎn)生的影響和麻醉藥物的藥代動力學(xué)與藥效學(xué)相關(guān),一般而言,麻醉藥物的作用持續(xù)時間越長,術(shù)后POCD發(fā)生率更高。臨床至今尚未完全明確POCD的具體發(fā)病機(jī)制,認(rèn)可度較高的為神經(jīng)炎癥假說,即外周創(chuàng)傷通過破壞血腦屏障,進(jìn)而引發(fā)中樞神經(jīng)系統(tǒng)炎癥,進(jìn)一步破壞神經(jīng)活動功能,最終出現(xiàn)POCD。POCD主要表現(xiàn)為社會適應(yīng)能力降低、注意力難以集中以及記憶功能明顯受損等,嚴(yán)重情況下甚至?xí)l(fā)永久性認(rèn)知功能障礙,致使患者生活難以自理[6]。
本研究為改善TURP手術(shù)患者術(shù)后認(rèn)知功能,降低POCD發(fā)生率,在麻醉過程中應(yīng)用右美托咪定,結(jié)果顯示,甲組患者T1時的HR,T1、T2、T3時的MAP均小于乙組(P<0.05),提示相較于生理鹽水,TURP手術(shù)患者麻醉中應(yīng)用右美托咪定對術(shù)中血流動力學(xué)產(chǎn)生的影響更小。這可能是因為右美托咪定可降低血漿兒茶酚胺濃度,維持術(shù)中血流動力學(xué)穩(wěn)定,減少血管活性物質(zhì)用量,促使患者預(yù)后得到改善。本研究還發(fā)現(xiàn),甲組患者術(shù)后1 d、3 d時的MMSE評分高于乙組(P<0.05),POCD發(fā)生率低于乙組(P<0.05),進(jìn)一步證明TURP手術(shù)患者麻醉中應(yīng)用右美托咪定可改善認(rèn)知功能,降低術(shù)后POCD發(fā)生率。這可能是因為右美托咪定不僅能減少機(jī)體內(nèi)炎癥因子釋放,同時還能對交感神經(jīng)興奮引發(fā)的應(yīng)激反應(yīng)進(jìn)行抑制,減輕疼痛感,降低應(yīng)激反應(yīng)程度,進(jìn)而改善認(rèn)知功能損傷。其次,右美托咪定具有腦保護(hù)作用,圍術(shù)期腦部缺氧缺血可能會引發(fā)腦損傷,進(jìn)而出現(xiàn)POCD,右美托咪定可通過提高腦氧攝取率,使得腦損傷程度減輕。右美托咪定屬于一種新型α2受體激動劑,主要在延髓、腦橋部位分布,籃斑為α2腎上腺素能受體分布最多的區(qū)域,同時也是負(fù)責(zé)睡眠、調(diào)節(jié)覺醒的部位,右美托咪定通過對藍(lán)斑核內(nèi)的α2腎上腺素能受體進(jìn)行作用,可降低腺甘酸環(huán)化酶活性,對蛋白激酶A磷酸化進(jìn)行抑制;右美托咪定還可激活鉀離子通道,促使細(xì)胞膜出現(xiàn)超極化現(xiàn)象,減少神經(jīng)元放電,抑制各種傷害性神經(jīng)遞質(zhì)釋放,進(jìn)而發(fā)揮腦保護(hù)作用,降低POCD發(fā)生率。
綜上所述,TURP手術(shù)患者麻醉中應(yīng)用右美托咪定對術(shù)后認(rèn)知功能的影響小,利于降低術(shù)后POCD發(fā)生率,值得推廣。
參考文獻(xiàn)
[1]? ? 朱虹,陳繼超,房楊,等.右美托咪定預(yù)防經(jīng)尿道前列腺電切術(shù)后老年患者認(rèn)知障礙的臨床效果[J].中國民康醫(yī)學(xué),2018,30(7):11-13.
[2]? ? 劉沖,章建平,方華,等.右美托咪定復(fù)合七氟醚喉罩全麻對行經(jīng)尿道前列腺電切術(shù)老年患者術(shù)后認(rèn)知功能的影響觀察[J].臨床合理用藥雜志,2019,12(23):66-67.
[3]? ?MEI B,XU G,HAN W,et al.Perioperative Neurocognitive Disorders(PND)Study Group.The Benefit of Dexmedetomidine on Postoperative Cognitive Function Is Unrelated to the Modulation on Peripheral Inflammation:A Single-center, Prospective,Randomized Study[J].Clin J Pain,2020,36(2):88-95.
[4]? ? 吳惠言,張艷靜,梁穎心,等.右美托咪定輔助全身麻醉對老年結(jié)直腸癌患者術(shù)后早期認(rèn)知功能及麻醉鎮(zhèn)靜藥物用量的影響分析[J].中國現(xiàn)代藥物應(yīng)用,2021,15(7):174-176.
[5]? ? GAO Y,ZHU X,HUANG L,et al.Effects of dexmedetomidine on cerebral oxygen saturation and postoperative cognitive function in elderly patients undergoing minimally invasive coronary artery bypass surgery[J].Clin Hemorheol Microcirc,2020,74(4):383-389.
[6]? ? 白菊.右美托咪定腰硬聯(lián)合麻醉對TURP手術(shù)患者血流動力學(xué)及認(rèn)知功能的影響[J].當(dāng)代醫(yī)學(xué),2021,27(8):97-99.
[7]? ?SHI H X,DU X J,WU F,et al.Dexmedetomidine for early postoperative cognitive dysfunction after video-assisted thoracoscopic lobectomy in elderly male patients with lung cancer[J].Medicine(Baltimore),2020,99(36):e21691.
[8]? ? 張明陽,楊德軍,樊順克.右美托咪定應(yīng)用于老年經(jīng)尿道前列腺電切術(shù)全麻患者對術(shù)后認(rèn)知功能和麻醉相關(guān)并發(fā)癥的影響[J].臨床醫(yī)學(xué),2020,40(6):58-59.
[9]? ?QIU Y,LI C,LI X,et al.Effects of dexmedetomidine on the expression of inflammatory factors in children with congenital heart disease undergoing intraoperative cardiopulmonary bypass:a randomized controlled trial[J].Pediatr Investig,2020,4(1):23-28.
[10]? ? 顧明將.右美托咪定聯(lián)合帕瑞昔布鈉在全髖關(guān)節(jié)置換術(shù)后多模式鎮(zhèn)痛中的應(yīng)用效果及對患者認(rèn)知功能的影響[J].臨床醫(yī)學(xué)研究與實踐,2021,6(11):96-97,124.
[11]? SEO K H,KIM K,LEE S K,et al.Changes in electroence- phalographic power and bicoherence spectra according to depth of dexmedetomidine sedation in patients undergoing spinal anesthesia[J].Int J Med Sci,2021,18(10):2117-2127.
[12]? ? 朱向暉,趙峰,賈雅蕊,等.術(shù)中右美托咪定使用在預(yù)防全麻下全髖關(guān)節(jié)置換術(shù)后譫妄發(fā)生及認(rèn)知功能障礙風(fēng)險的臨床研究[J].醫(yī)藥論壇雜志,2021,42(24):26-31,37.
(收稿日期:2022-11-23)
猜你喜歡
中學(xué)生數(shù)理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
當(dāng)代陜西(2021年2期)2021-03-29 07:41:24
中國實用醫(yī)藥(2016年30期)2016-12-28 16:57:10
中外醫(yī)學(xué)研究(2016年26期)2016-11-30 03:02:44
藝術(shù)科技(2016年9期)2016-11-18 16:23:08
中國現(xiàn)代醫(yī)生(2016年23期)2016-11-15 03:24:49
中國實用醫(yī)藥(2016年19期)2016-08-05 19:20:43
中國實用醫(yī)藥(2016年16期)2016-07-26 22:49:17
中國塑料(2016年3期)2016-06-15 20:30:00
