碼垛機器人本體結構分析與性能研究
2011-06-23 03:01:52劉廣亮
裝備制造技術 2011年11期
關鍵詞:結構
李 倩 ,劉廣亮 ,孫 潔
(1.山東省機器人與制造自動化技術重點實驗室,山東 濟南250014;2.山東省科學院自動化研究所,山東 濟南250014)
碼垛機器人是實現包裝和物流自動化的關鍵裝備,針對生產線中各式產品的碼垛要求,可實現自動、高速、準確、連續的碼垛作業,并能降低工人勞動強度,提高生產效率。因此,碼垛機器人被廣泛應用于飲料、食品、藥品、石化等領域,具有廣闊的應用前景。
目前,ABB、FANUC、KUKA等主流機器人廠家均擁有系列化的碼垛機器人產品,并壟斷了國內外市場;而在國內,碼垛機器人的研究才剛剛起步,國產的、成熟的、產業化的碼垛機器人產品還未出現[1~3]。
本文參考國內外知名品牌機器人,通過分析已有產品的結構特點,研究各品牌機器人的本體性能參數,大致明確了產品設計的基本指標,為碼垛機器人開發提供參考。
1 結構分析
與通用型機器人不同,碼垛機器人有獨特的作業特點:搬運物料實現空間內的平移和水平面內的旋轉,無需進行物料的翻轉,因而采用了獨特的結構。下面以KUKA的KR 180-2 PA為例,對碼垛機器人一般所采用的結構形式進行分析。
KR 180-2 PA最大負載總質量為180 kg,采用4軸鉸鏈式結構,由6部分組成:基座、腰轉部件、大臂、小臂、腕部和工具法蘭,由JT 1、JT 2、JT 3和JT 4共4個關節驅動,其結構形式如圖1所示。
其中,JT 1驅動腰部轉件實現回轉運動,JT 2和JT 3分別驅動大臂和小臂的擺動,JT 4驅動工具法蘭旋轉。各關節由交叉滾子軸承承載,利用交流伺服電機+精密RV減速器驅動。根據物料形狀特點,可以在工具法蘭配置不同的抓手。機器人末端工具法蘭的位置,通過控制JT 1、JT 2和JT 3關節來實現;末端工具法蘭的姿態,則通過控制JT 1和JT 4關節的轉動來保證;在腕部姿態的控制上,采用了獨特的結構。通過兩組平行四連桿傳動,實現了JT 4軸線與JT 1軸線始終保持平行,使腕部始終保持垂直于地面的姿態。
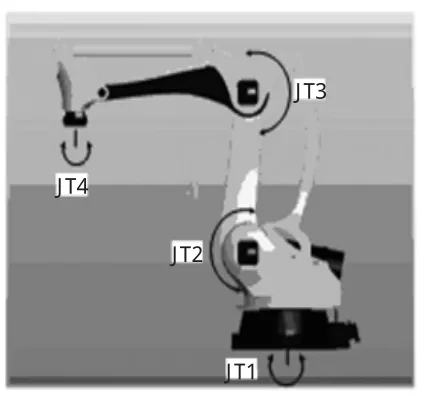
圖1 碼垛機器人KR 180-2 PA結構示意圖
2 本體性能研究
碼垛機器人主要用于搬運重載物體實現大空間轉移,且高速度、高精度運行,其本體的主要性能參數包括負載能力、工作空間、運動性能、重復定位精度等[4]。這些性能參數選擇的合理與否,將直接關系到碼垛機器人本體開發的成敗。以下通過分析比較已有碼垛機器人產品的性能參數,基本明確了碼垛機器人本體開發中的各項性能指標。
2.1 負載能力
負載總質量表明了機器人搬運重物的能力,它取決于機器人的結構尺寸和驅動容量,還與機器人的運行速度有關。按照負載總質量能力劃分,各機器人廠家均形成了完整的碼垛機器人規格系列,表1列出了 ABB、FANUC、KUKA、YASKAWAKAWASAKI這5大品牌的四軸碼垛機器人負載系列[5]。
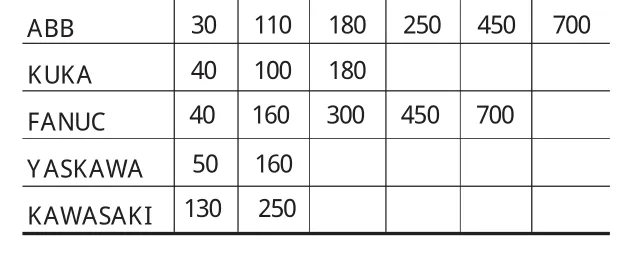
表1 各品牌碼垛機器人的負載總質量系列規格表(單位:kg)
在包裝行業,對于碼垛機器人的需求主要集中在100~300kg負載總質量范圍內。而在這一區間里,各品牌一般擁有大小兩種規格的機型,且采用統一的外形尺寸與機械結構,只需替換伺服電機與減速器,即可實現型號間互換。如ABB的IRB 660-180和 IRB660-250、KUKA的KR100-2 PA和KR 180-2 PA、FUANC的 M-410 iB/160 M-410 iB/300 KAWASAKI的ZD 130 S和ZD 250 S等。
2.2 工作空間
工作空間指機器人末端可在空間到達的最大范圍。圖2是ABB的IRB660-180、KUKA的KR180-2 PA和KAWASAKI的ZD 130 S工作空間的疊加圖。可以看出,各款機器人的工作空間基本重合,大致反映了市場的實際需求(托盤尺寸、垛堆高度等)。
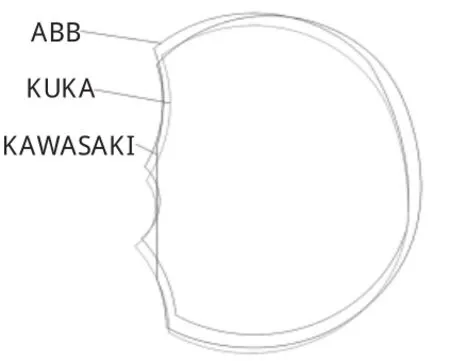
圖2 碼垛機器人的工作空間
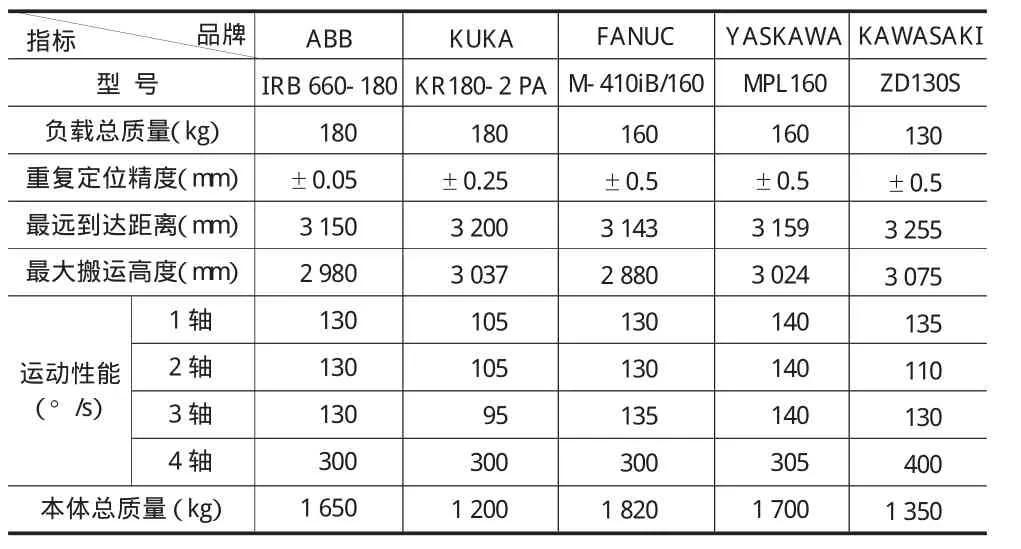
表2 各品牌碼垛機器人性能指標橫向比較
表2將各品牌碼垛機器人對應型號的性能指標進行了橫向比較,從中可以發現碼垛機器人性能指標的共性[6~8];表3則以KUKA為例[6~8],將碼垛機型KR 180-2 PA與其對應的通用機型KR 180-2進行了縱向比較[7],凸顯了碼垛機器人不同于通用型機器人的性能特點。
表2中,數款機器人的最遠到達距離,都約為3200 mm,而最大搬運高度約為3000 mm。
2.3 運動性能
為了適應前端包裝工段的生產速度,碼垛作業往往對節拍要求高。目前,世界上碼垛速度最快的機器人,可達2000回/h以上。當然,最直接的運行性能參數,還是各個軸的運動速度。表2列出了幾款機器人各個軸的最大運動速度,可作為本體設計的參考指標;表3中,各個軸逐一對比,KUKA的碼垛機型KR 180-2 PA比通用機型KR 180-2的運動速度都要快,顯示了碼垛機器人本體設計里運動性能的重要性。
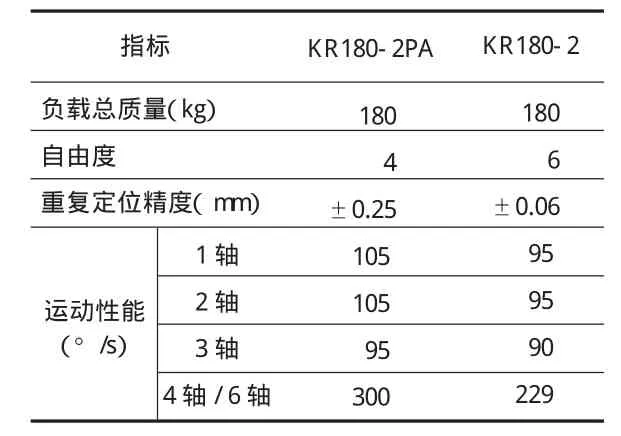
表3 KR 180-2 PA與KR 180-2的縱向對比
2.4 重復定位精度
重復定位精度,指機器人在相同的運動指令下,連續重復運動若干次,其位置之間的誤差度量,是機器人的主要技術參數之一。碼垛機器人主要用于實現大尺寸物料的點位運動,對精度要求并不高。從表2可看出,其重復定位精度能控制在±0.5 mm以內即可;在表3里,碼垛機型KR 180-2 PA比通用機型KR 180-2的重復定位精度明顯低了一個檔次。
3 結束語
通過對已有碼垛機器人產品的結構分析和本體性能參數的研究,得出了其通常所采用的結構形式,明確了本體設計的基本性能指標,為產品開發提供了參考。但在具體產品開發過程中,僅確定了本體的結構形式、負載能力、工作空間、運動性能和重復定位精度等,是遠遠不夠的,還有許多實際問題需考慮。各性能指標間存在一定矛盾,應綜合分析考慮;有的結構形式雖然有利于提高機器人性能,但工藝復雜,考慮國內加工水平,需合理選擇制造工藝;樣機完成后的性能測試,亦是產品開發的關鍵環節。相信在克服了碼垛機器人開發過程中的諸多難題后,一定會出現國產的、成熟的、產業化的碼垛機器人產品。
[1]李曉剛,劉晉浩.碼垛機器人的研究與應用現狀、問題及對策[J].包裝工程,2011,(3):96-101.
[2]胡洪國,高建華,楊汝清.碼垛技術綜述[J].組合機床與自動化加工技術,2000,(6):7-9.
[3]孫立寧.機器人技術國內外發展狀況[J].國內外機電一體化技術,2002,(4):29-41.
[4]熊有倫,丁 漢,劉恩滄.機器人學[M].北京:機械工業出版社,1993,10-28.
[5]葉 暉,管小清.工業機器人實操與應用技巧[M].北京:機械工業出版社,2010,3-14.
[6]上海ABB工程有限公司.IRB 660機器人產品手冊[Z].上海:上海ABB工程有限公司,2004.
[7]庫卡機器人(上海)有限公司.KR180-2系列手冊[Z].上海:庫卡機器人(上海)有限公司,2011.
[8]上海發那科機器人有限公司.M-410iB規格說明[Z].上海:上海發那科機器人有限公司,2007.
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50