自行式電動割草機的試驗研究
2011-06-23 03:01:56劉興燕
裝備制造技術(shù) 2011年11期
劉興燕
(山東黃河梁山機械廠,山東 梁山 272600)
2002年,水利部黃河水利委員會提出黃河下游標準化堤防建設(shè),構(gòu)筑防洪保障線、搶險交通線、生態(tài)景觀線“三位一體”的標準化堤防體系,通過放淤固堤、堤防幫寬、堤頂硬化、防浪林以及險工控導(dǎo)加固改建等項目建設(shè),構(gòu)造維持黃河健康生命的基礎(chǔ)設(shè)施,達到人與自然環(huán)境和諧,謀求黃河長治久安。
隨著黃河下游標準化堤防建設(shè)的進行,對工程養(yǎng)護的要求標準也大大提高,既要保證工程強度,又要注重美化。如對堤坡上的防護草皮,在保證其護坡能力的同時,由過去的任其自然生長,變?yōu)橐笳R美觀,規(guī)范劃一。為保持工程面貌,在夏季植物生長旺盛季節(jié),需要對堤坡草皮經(jīng)常進行修剪。堤坡除草作業(yè)以往多采用勞動密集型鐮割工作方式或人工拔草,不但人力投入多,勞動強度大,而且作業(yè)條件艱苦,工作效率低,往往經(jīng)過多次修剪,也達不到整齊規(guī)范的品質(zhì)目標。
近幾年來,隨著機械化、自動化的日益普及,在黃河堤防養(yǎng)護工作中,割草作業(yè)逐步向機械化邁進,當前多采用背負式內(nèi)燃割草機,但設(shè)備整機總質(zhì)量較大,振動強烈,對人的健康危害較大,長期作業(yè)無疑會嚴重影響操作人員的身體健康。
為服務(wù)于黃河防洪工程的標準化管理,改善堤坡除草人員的勞動條件,我們立足于黃河下游標準化堤防的實際養(yǎng)護工作,考慮在堤防養(yǎng)護中,割草作業(yè)的經(jīng)常性、安全性等實際要求,在深入調(diào)查的基礎(chǔ)上,博采眾長,本著采用新材料、新技術(shù)、新工藝的原則,于2009年8月研制出一種低噪音、機動靈活、能在堤坡上自動行走且操作簡單、機械化效率高的新型割草設(shè)備。在2010年6月通過山東省科技廳組織的產(chǎn)品鑒定。該設(shè)備主要由電動割草裝置、自動行走裝置、機架底座、發(fā)電機組及電纜盤、操作控制系統(tǒng)、動力系統(tǒng)等組成,是一種可在坡度小于1∶2.5的堤坡上自動行走的履帶式割草設(shè)備,運行機動靈活,效率高,割草效率可達1400m2/h,專家一致認為,整體上達到國內(nèi)領(lǐng)先水平。
1 自行式電動割草機的結(jié)構(gòu)組成
ZG-1230型自行式電動割草機的結(jié)構(gòu),主要由電動割草裝置、自動行走裝置、機架底座、發(fā)電機組及電纜盤、操作控制系統(tǒng)、動力系統(tǒng)等部分組成。其基本外形結(jié)構(gòu)如圖1所示。
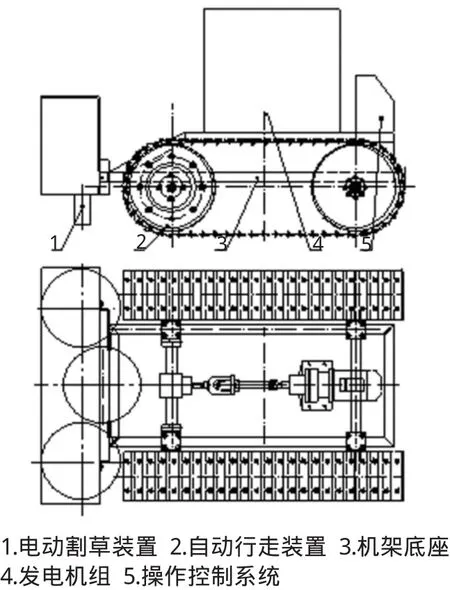
圖1 ZG—1230型自行式電動割草機
2 技術(shù)參數(shù)及各部分的設(shè)計計算
2.1 主要技術(shù)參數(shù)
整機總質(zhì)量(kg):520;
輪距(mm):970;
軸距(mm):970;
鏈輪直徑(mm):470;
行走速度(m/min):18;
割草電機功率(kW):1×3;
行走電機功率(kW):1.1;
最大割幅(mm):1234;
最大爬坡能力:≤1∶2.5;
割刀高度調(diào)節(jié)范圍(mm):離地60~160;
作業(yè)效率(m2/h):1200~1400。
2.2 割草面積的計算
根據(jù)工作環(huán)境狀況及市場調(diào)研,決定選用3臺RT 8020型大功率割草電動機。如圖2所示。
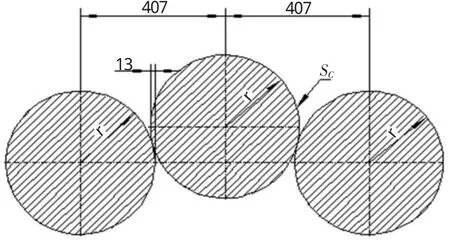
圖2 割草面積示意圖
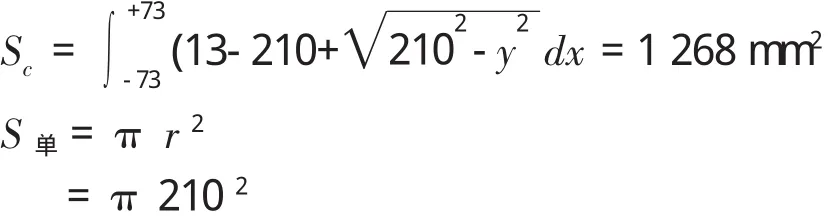
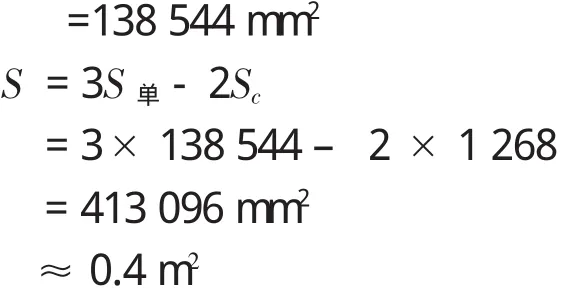
每臺割草電動機的割除草面積為
其中,
所有陰影部分的面積即為割草面積,即所有圓減去重疊部分的面積Sc,如圖3所示。
圓(x-210)2+y2與直線x=13所圍成圖形面積,即為重疊部分的面積Sc。
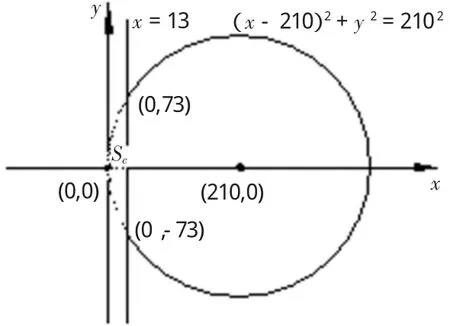
圖3 重疊面積
2.3 行走電動機功率校核計算
已知參數(shù):
ZG-1230型自行式電動割草機的自身總質(zhì)量為G=520 kg;
行走電動機的轉(zhuǎn)速為n2=910 r/min;
減速器傳動比為i1=1∶25;
差速器傳動比為i2=1∶3;
鏈輪直徑為R1=470 mm=0.47 m;
則鏈輪的轉(zhuǎn)速為n3=n2i1i2
=910×1/25×1/3
=12.2 r/min,
則割草機行走速度為ν行=π R1ω2
=π×0.47×12.2
≈18 m/min;
鋼對地面的摩擦系數(shù)為μ=0.20~0.35,取
μ=0.25,
鏈輪傳動效率為90%;
ZG-1230型自行式電動割草機爬坡工作時,受力如圖4所示。
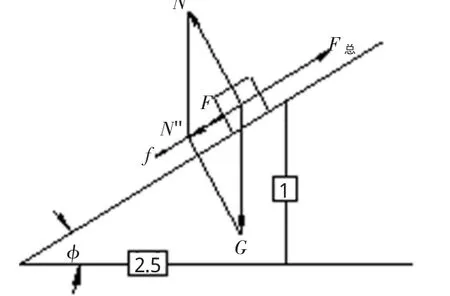
圖4 電動割草機行走受力圖
從圖可知,
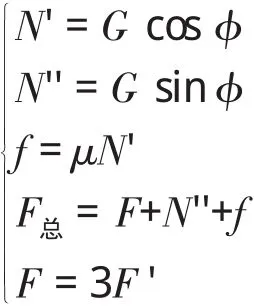
把已知數(shù)代入,得
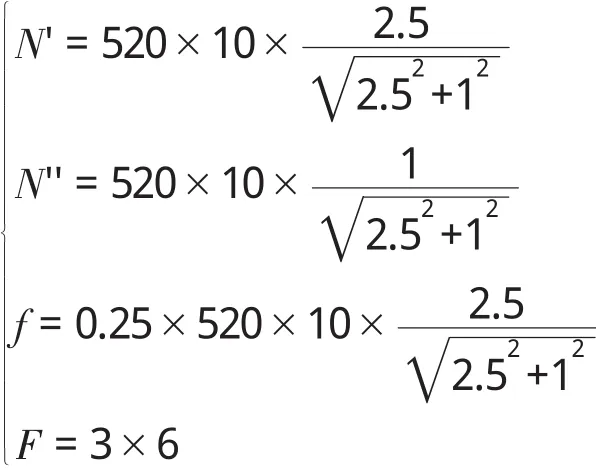
計算得
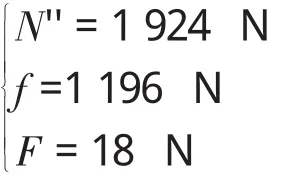
則

所需電機功率計算得
所選電動機為1.1 kW。

故所選電動機能夠滿足設(shè)計需要。
2.4 鏈輪的選擇
鏈速度ν=18 m/min
電動機功率P=1.1 kW
由鏈輪速度ν=18 m/min
希望結(jié)構(gòu)緊湊,初步確定鏈輪齒數(shù)Z1=45
考慮工作平穩(wěn),電動機拖動,選工況系數(shù)KA=1.0,則計算功率Pc=PKA=1.1×1.0=1.1 kW
考慮自行式電動割草機的行走特點,選雙排鏈,查得多排鏈系數(shù)Kp=1.0,
齒輪系數(shù)Kz=1.1,
鏈長系數(shù)Kl查參考文獻[1]確定為Kl=1.06,
所需傳遞功率

查圖5選滿足要求的20 A鏈,p=31.75 mm
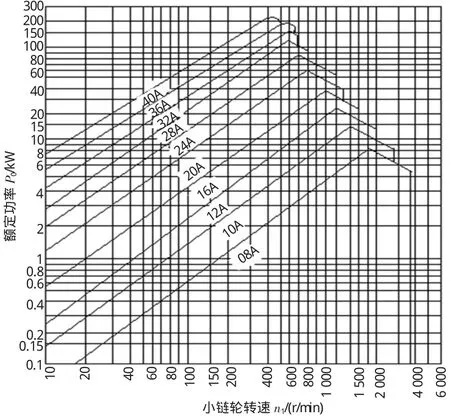
圖5 滾子鏈的額定功率曲線
初步設(shè)計中心距為a=970 mm,
鏈輪齒數(shù)Z1=45。
則鏈節(jié)數(shù)
因鏈速為ν=18 m/min,小于0.6 m/s,其失效形式是過載拉斷,應(yīng)進行靜強度計算,鏈的靜強度安全系數(shù)n應(yīng)滿足如下要求
式中,
Q為單排鏈的極限拉伸載荷;
m 為鏈板寬(mm),m=520;
KA為工況系數(shù);
F1為鏈的緊邊工作拉力;
F為工作拉力;
F=3974 N
Fc為鏈兩邊所受的離心拉力
Fc=qν2
Ff為鏈條下垂而產(chǎn)生的懸垂力
Ff=Kfqga
其中,
ν為鏈速;
q為每米長度鏈的凈質(zhì)量;
Kf為垂度系數(shù);
a為中心距;
g為下垂度,取0.02。
[1]確定
Q=86.7 N;
KA=1.0;
q=3.8 kg/m;
Kf=7。
把已知數(shù)據(jù)代入得
故滿足設(shè)計要求。
3 創(chuàng)新點及推廣前景
通過與國內(nèi)外同類產(chǎn)品的比較,總結(jié)該割草機具有以下創(chuàng)新點:
(1)將履帶式鏈輪行走機構(gòu)有機地與割草設(shè)備組合在一起,實現(xiàn)了該設(shè)備在堤坡上工作運行靈活行走的目的;
(2)巧妙地將后橋差速傳動裝置和液壓鼓式剎車系統(tǒng)有機結(jié)合,利用兩側(cè)輪轂單獨制動,解決了整機行走轉(zhuǎn)向的難題;
(3)設(shè)計了割草高度調(diào)整裝置,便于調(diào)整割草高度,以適應(yīng)不同的地形;增設(shè)兩道漏電保護罩裝置,增加了操作人員的安全系數(shù);采用了電氣控制方式集中控制,自動化程度高,操作容易,快速靈活;增設(shè)兩道漏電保護裝置,提升整機安全性;
(4)電動割草機頭部結(jié)構(gòu)布置呈品字形,前一后二,且前一切割圓與后兩切割圓相外切,保證3個電動割草機頭在工作時互不干擾,保證割草品質(zhì)。
(5)其利用高速旋轉(zhuǎn)的尼龍繩割斷草莖,由于尼龍繩具有柔韌性,使其遇到硬性障礙物時會退讓,不損傷人和機器,安全性能高。
該設(shè)備適用于堤坡割草養(yǎng)護作業(yè),其性能優(yōu)良、結(jié)構(gòu)緊湊、操作方便、工作可靠,具有經(jīng)濟性、實用性和靈活性等優(yōu)勢,能達到投資少、見效快的效果。
近年來,隨著黃河防洪工程管理標準化的開展,臨背河堤坡坡比已經(jīng)逐步調(diào)整為1∶3的比例,坡面的平順度也有了較大的提高,這給機械化修剪草皮提供了便利條件,機械化割草不僅可以節(jié)約大量開支及節(jié)省勞動力,還可以提高工程維護品質(zhì)。
ZG-1230型割草機是針對堤防養(yǎng)護工作的實際需要,為提高割草作業(yè)工作效率、降低操作工人的勞動強度、減少高強度作業(yè)給一線工人帶來損害而研制的一種新型履帶式自行電動割草設(shè)備。每小時割草是背負式割草機工效的15倍,可見其不但具有良好的社會效益,還具有較高的經(jīng)濟效益,在當前標準化堤防建設(shè)和管理日益加強的情況下,將有十分廣泛的推廣前景。
4 結(jié)束語
社會進步要求以機械取代人工作業(yè),堤防管理要盡可能改善管理養(yǎng)護人員的工作條件,降低勞動強度。管理養(yǎng)護機械化是提高養(yǎng)護作業(yè)品質(zhì)與進度的重要手段,是實現(xiàn)由傳統(tǒng)養(yǎng)護方式向現(xiàn)代養(yǎng)護方式轉(zhuǎn)變的物質(zhì)基礎(chǔ)。因此,投入各種專用機械用于維修養(yǎng)護,提高維修養(yǎng)護的機械化程度,減輕勞動強度非常必要。
參考文獻:
[1]吳宗澤.機械設(shè)計手冊(上冊)[K].北京:燃料化學工業(yè)出版社,1970.
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
口腔護理用品工業(yè)(2021年4期)2021-11-02 08:22:56
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
機械工業(yè)標準化與質(zhì)量(2018年5期)2018-05-30 09:48:17
中國公路(2017年9期)2017-07-25 13:26:38
故事大王(2016年7期)2016-09-22 17:30:08
質(zhì)量與標準化(2015年7期)2015-07-12 12:21:02
汽車維修與保養(yǎng)(2015年8期)2015-04-17 03:32:51
中國質(zhì)量與標準導(dǎo)報(2014年9期)2014-02-28 22:25:45