基于Buck-Boost變換器驅(qū)動(dòng)的無刷直流電動(dòng)機(jī)控制系統(tǒng)
2011-07-20 03:59:14孟武勝
微特電機(jī) 2011年11期
孟武勝,王 波,何 博
(西北工業(yè)大學(xué),陜西西安710072)
0 引 言
無刷直流電動(dòng)機(jī)(以下簡(jiǎn)稱BLDCM)是一種高性能、高可靠性的機(jī)電一體化產(chǎn)品。它具備交流電動(dòng)機(jī)的結(jié)構(gòu)簡(jiǎn)單、運(yùn)行可靠、維護(hù)方便等優(yōu)點(diǎn),又具備有刷直流電動(dòng)機(jī)的運(yùn)行效率高、無勵(lì)磁損耗以及調(diào)速性能好等諸多優(yōu)點(diǎn),同時(shí)克服了有刷直流電動(dòng)機(jī)的機(jī)械電刷和換向器所帶來的噪聲、火花、無線電干擾及壽命短等弊病,降低了制造成本,簡(jiǎn)化了電機(jī)的維修。正因?yàn)槿绱耍瑹o刷直流電動(dòng)機(jī)在民用和軍用技術(shù)等領(lǐng)域得到了廣泛應(yīng)用[1-2]。
本文提出一種基于Buck-Boost變換器的無刷直流電動(dòng)機(jī)控制系統(tǒng),通過轉(zhuǎn)速和直流母線電流的多反饋閉環(huán)實(shí)現(xiàn)電機(jī)控制的策略。在分析此控制系統(tǒng)的基礎(chǔ)上,通過MATLAB/Simulink仿真驗(yàn)證了控制系統(tǒng)的有效性。
1 驅(qū)動(dòng)部分
民用無刷直流電動(dòng)機(jī)的驅(qū)動(dòng)一般由交流電源、整流器(交流-直流變換器)、直流母線電容濾波器和實(shí)現(xiàn)電機(jī)換向的三相逆變器(直流-交流變換器)組成。大多數(shù)無刷直流電動(dòng)機(jī)驅(qū)動(dòng)能量由電網(wǎng)單相交流電源提供,所以整流器也是單相的。本文提出方法的驅(qū)動(dòng)總體結(jié)構(gòu)如圖1所示。
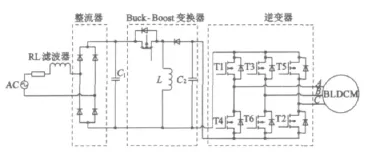
圖1 無刷直流電動(dòng)機(jī)驅(qū)動(dòng)總體結(jié)構(gòu)
1.1 BLDCM 數(shù)學(xué)模型[1-3]
以兩相導(dǎo)通星形三相六狀態(tài)為例,分析無刷直流電動(dòng)機(jī)的數(shù)學(xué)模型。為了便于分析,假設(shè):
(1)三相繞組完全對(duì)稱,空間上互差120°電角度;
(2)三相繞組電阻、電感參數(shù)完全相同;
(3)轉(zhuǎn)子永磁體產(chǎn)生的氣隙磁場(chǎng)為方波,三相繞組反電動(dòng)勢(shì)為梯形波;
(4)忽略齒槽、換向過程和電樞反應(yīng)等的影響;
(5)磁路不飽和,不計(jì)渦流和磁滯損耗。則無刷直流電動(dòng)機(jī)數(shù)學(xué)模型方程式:
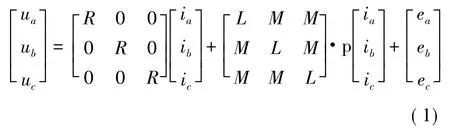

在電機(jī)運(yùn)行過程中,電磁轉(zhuǎn)矩表達(dá)式:

式中:ω為電機(jī)機(jī)械角速度。
機(jī)械運(yùn)動(dòng)方程:

1.2 逆變器
三相逆變器受無刷直流電動(dòng)機(jī)轉(zhuǎn)子位置傳感器的控制。來自位置傳感器的信號(hào),按一定的邏輯使三相逆變器的開關(guān)管順序?qū)ǎ姍C(jī)電樞繞組內(nèi)的電流發(fā)生跳變,從而改變了定子的磁狀態(tài),以保證無刷直流電動(dòng)機(jī)可靠運(yùn)行。逆變器開關(guān)管一般選用MOSFET,因?yàn)樗泻芨叩拈_關(guān)頻率,易于進(jìn)行PWM調(diào)制。
根據(jù)本文提出的方法,Buck-Boost變換器選用高頻的MOSFET開關(guān)管,所以三相逆變橋開關(guān)管可以選用IGBT,并且IGBT采用恒通方式,即每一個(gè)狀態(tài)區(qū)間內(nèi)處于開通的兩個(gè)開關(guān)管不進(jìn)行 PWM調(diào)制,所以逆變器控制比較簡(jiǎn)單,而且可以極大地減少開關(guān)損耗[5]。
1.3 整流器
民用技術(shù)中,直流電壓通常都是通過單相交流電源得到,采用簡(jiǎn)單的二極管整流器就可以實(shí)現(xiàn)。由于電網(wǎng)電流不是理想的正弦波,而且負(fù)載也會(huì)產(chǎn)生諧波和干擾,因此在電源端需要加濾波器,本文選用RL濾波器。整流器輸出端電容C1的作用是減少直流母線的電壓脈動(dòng)。
1.4 Buck -Boost變換器[7]
無刷直流電動(dòng)機(jī)調(diào)速一般是通過改變逆變器中開關(guān)管的PWM控制信號(hào)實(shí)現(xiàn)的,但是這種控制在高速和瞬態(tài)時(shí)會(huì)造成換相延遲和很高的開關(guān)損耗。本文通過控制Buck-Boost電路開關(guān)管的占空比大小,來連續(xù)地調(diào)節(jié)直流母線電壓Vo,進(jìn)而實(shí)現(xiàn)調(diào)速,后級(jí)三相逆變橋采用恒通控制方式。
Buck-Boost直流變換器也稱為反極性變換器,是輸出電壓可低于或也可高于輸入電壓的一種單管直流變換器,其電路結(jié)構(gòu)如圖2所示。
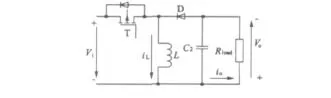
圖2 Buck-Boost變換器
理論上,電路中電感L和輸出電容C2選取足夠大,電流波形和電壓波形會(huì)很平滑,并在穩(wěn)態(tài)時(shí)保持常值。但從經(jīng)濟(jì)和尺寸角度考慮,L和C2選取能保持電流與電壓脈動(dòng)在較低水平即可。
變換器基本工作原理是在一個(gè)周期的一段時(shí)間內(nèi)使電感儲(chǔ)能,在后一段時(shí)間內(nèi)將儲(chǔ)能傳遞給負(fù)載,輸出電壓極性與輸入電壓相反,開關(guān)管采用PWM控制方式,可以推導(dǎo)出如下關(guān)系式:
式中:Vo為直流母線電壓(Buck-Boost變換器輸出電壓);Vi為輸入電壓(整流器輸出電壓);ton為一個(gè)周期內(nèi)MOSFET開通時(shí)間;toff為一個(gè)周期內(nèi)MOSFET關(guān)斷時(shí)間;D為占空比;Io為輸出平均電流;IL為電感平均電流。
2 控制部分
無刷直流電動(dòng)機(jī)轉(zhuǎn)子位置傳感器提供逆變器開關(guān)管IGBT順序?qū)ǖ?20°方波信號(hào),控制部分通過Buck-Boost變換器調(diào)節(jié)逆變器輸入電壓,實(shí)現(xiàn)電機(jī)控制。
2.1 控制器
改變Buck-Boost變換器中MOSFET開關(guān)管占空比可調(diào)節(jié)逆變器輸入電壓,開關(guān)管MOSFET的PWM控制信號(hào)生成如圖3所示。
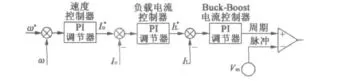
圖3 速度電流反饋控制環(huán)
轉(zhuǎn)速反饋信號(hào)ω與給定轉(zhuǎn)速信號(hào)ω*的誤差信號(hào)通過速度控制器(PI調(diào)節(jié)器)生成參考母線電流;母線輸出電流Io與的誤差信號(hào)輸入負(fù)載電流控制器(PI調(diào)節(jié)器)可以更精確地調(diào)節(jié)開關(guān)管占空比,實(shí)現(xiàn)Buck-Boost變換器較小的電流脈動(dòng);電感電流IL與參考電流的誤差信號(hào)通過Buck-Boost電流控制器(PI調(diào)節(jié)器)可獲得MOSFET開關(guān)管管的導(dǎo)通周期。輸出與三角波相比產(chǎn)生MOSFET管開關(guān)頻率,三角波的頻率選為20 kHz。
3 仿真結(jié)果
無刷直流電動(dòng)機(jī)參數(shù)如表1所示。
在MATLAB/Simulink環(huán)境下,根據(jù)無刷直流電動(dòng)機(jī)數(shù)學(xué)模型,搭建無刷直流電動(dòng)機(jī)典型控制模型以及本文提出的基于Buck-Boost變換器的控制模型,進(jìn)行仿真比較[8-9]。
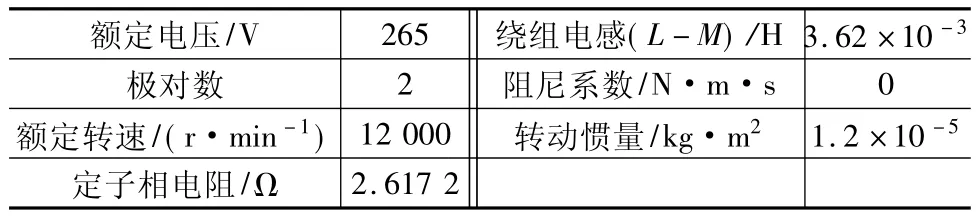
表1 BLDCM參數(shù)
無刷直流電動(dòng)機(jī)典型控制模型由265 V直流電源供電,轉(zhuǎn)速和直流母線電流構(gòu)成雙閉環(huán)反饋控制。三相逆變器仿真選用開關(guān)管MOSFET,開關(guān)頻率選10 kHz。電機(jī)從起動(dòng)到穩(wěn)態(tài)的定子A相電流,電磁轉(zhuǎn)矩,轉(zhuǎn)速仿真波形如圖4所示,電機(jī)從起動(dòng)到轉(zhuǎn)速達(dá)到額定轉(zhuǎn)速需要0.05 s左右的時(shí)間,穩(wěn)態(tài)時(shí)的局部放大波形如圖5所示。
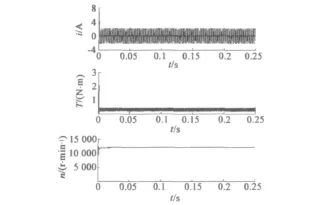
圖4 典型控制模型仿真波形
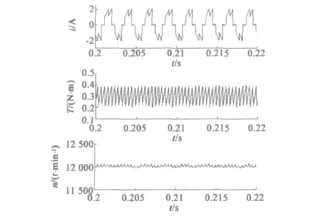
圖5 典型控制模型局部放大波形
無刷直流電動(dòng)機(jī)基于Buck-Boost變換器的控制模型從起動(dòng)到穩(wěn)態(tài)的直流母線電流和電壓仿真波形如圖6所示。定子A相電流、電磁轉(zhuǎn)矩、轉(zhuǎn)速仿真波形如圖7所示。穩(wěn)態(tài)時(shí)的局部放大波形如圖8所示。
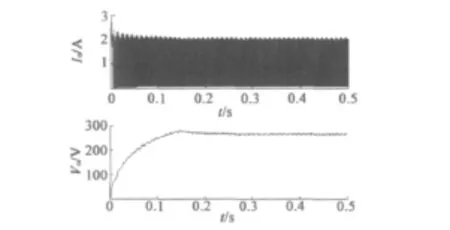
圖6 基于Buck-Boost變換器控制模型的直流母線電流、電壓仿真波形

圖7 基于Buck-Boost變換器控制模型的相電流、電磁轉(zhuǎn)矩、轉(zhuǎn)速仿真波形
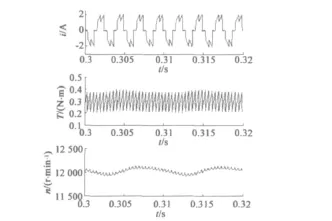
圖8 基于Buck-Boost變換器控制模型的相電流、電磁轉(zhuǎn)矩、轉(zhuǎn)速局部放大波形
直流母線電壓隨著轉(zhuǎn)速的增加而增加。輸入單相正弦交流電含有二次諧波,會(huì)造成直流母線電壓脈動(dòng),增大電容C2可以減小直流母線電壓的脈動(dòng)。
無刷直流電動(dòng)機(jī)從起動(dòng)到轉(zhuǎn)速達(dá)到額定轉(zhuǎn)速(12 000 r/min)需要0.15 s左右,這個(gè)過程中母線電流比穩(wěn)態(tài)時(shí)大,但是在可以接受的范圍內(nèi)。
穩(wěn)態(tài)時(shí)定子相電流和電磁轉(zhuǎn)矩的變化頻率為100 Hz,是電網(wǎng)頻率的兩倍,這些都會(huì)增大控制系統(tǒng)銅損。
4 結(jié) 語
本文提出的無刷直流電動(dòng)機(jī)控制模型,將速度控制從逆變器換向中分離,并且在直流母線中引入了Buck-Boost變換器,通過仿真及波形的分析驗(yàn)證了方案的有效性及可行性。逆變器開關(guān)管工作在更低的頻率,尺寸更小,成本更低;由于只有Buck-Boost變換器開關(guān)管工作在高頻狀態(tài),逆變器開關(guān)損耗會(huì)減少;比較圖4和圖7,本文提出方法通過增加起動(dòng)時(shí)間(0.05~0.15 s),使起動(dòng)電流和起動(dòng)轉(zhuǎn)矩減小很多。
主要缺點(diǎn)是電網(wǎng)交流電壓脈動(dòng)會(huì)傳到驅(qū)動(dòng)電路的其他部分,導(dǎo)致直流母線電壓脈動(dòng)增大,從而使穩(wěn)態(tài)轉(zhuǎn)速波動(dòng)變大。通過增大濾波電容C1和C2可以減小波動(dòng),但增大電容會(huì)增加成本和尺寸,所以C1和C2要根據(jù)要求適當(dāng)選取。
[1] 龍駒,舒欣梅.永磁無刷直流電動(dòng)機(jī)轉(zhuǎn)速控制系統(tǒng)的優(yōu)化設(shè)計(jì)[M].四川:西南交通大學(xué)出版社,2006.
[2] 劉剛,王志強(qiáng),房建成.永磁無刷直流電機(jī)控制技術(shù)與應(yīng)用[M].北京:機(jī)械工業(yè)出版社,2008.
[3] 葉金虎.現(xiàn)代無刷直流永磁電動(dòng)機(jī)的原理和設(shè)計(jì)[M].北京:科學(xué)出版社,2007:4-43.
[4] 張曉鋒,胡慶波,呂征宇.基于BUCK變換器的無刷直流電機(jī)轉(zhuǎn)矩脈動(dòng)抑制方法[D].電工技術(shù)學(xué)報(bào),2005(9):20-29.
[5] 宋毅.基于Buck-Boost變換器的無刷直流電機(jī)轉(zhuǎn)矩脈動(dòng)抑制的控制仿真研究[D].大連:大連交通大學(xué),2008.
[6] Khopkar R,Madani S M,Hajiaghajani M,et al.A Low - Cost BLDC Motor Drive using Buck-Boost Converter for Residential and Commercial Application[C]//IEEE International Electric Machines and Drives Conference.2003,2:1251 -1257.
[7] 李宏,王崇武.現(xiàn)代電力電子技術(shù)基礎(chǔ)[M].北京:機(jī)械工業(yè)出版社,2009.
[8] 楊永亮.雙余度無刷直流電機(jī)控制技術(shù)研究[D].西安:西北工業(yè)大學(xué),2007.
[9] 張海濤.高精度雙余度舵機(jī)伺服系統(tǒng)研究[D].西安:西北工業(yè)大學(xué),2007.
[10] Lai Y S,Lee K Y,Tseng J H,et al.Efficiency Comparison of PWM-Controlled and PAM-Controlled Sensorless BLDCM Drives for Refrigerator Applications[C]//Conference Record of the 42nd IEEE IAS Annual Meeting.2007:268-273.
