基于模糊PID算法的輪式機器人驅動輪控制器設計
2011-07-20 03:59:18李聲晉李啟瑞
微特電機 2011年11期
關鍵詞:系統(tǒng)
李 鑫,盧 剛,李聲晉,周 勇,李啟瑞
(1.西北工業(yè)大學,陜西西安710072;2.中興通訊股份有限公司,陜西西安710065)
0 引 言
目前,機器人已經(jīng)廣泛應用于工業(yè)生產(chǎn)中,在其它領域的應用也逐漸增多。輪式機器人作為移動機器人的一種,具有體積小、成本低、機動性好、生存能力強等優(yōu)點,應用前景廣闊,越來越受到各國研究者的關注[1]。作為輪式機器人的控制重點之一,機器人各驅動輪的調(diào)速控制精度要求也越來越高,傳統(tǒng)的PID控制方法已經(jīng)很難滿足其要求[2]。因此,為了獲得高精度的機器人驅動輪轉速控制效果,本文將具有較強魯棒性能的模糊控制理論與PID控制理論相結合,設計了驅動輪的模糊PID調(diào)速控制器。
1 輪式機器人機械結構
本文所設計的輪式機器人采用對稱四輪驅動結構,由四個結構尺寸完全相同的獨立運動單元和車體構成,并且配備有多電機協(xié)調(diào)驅動控制系統(tǒng)。車體在機器人中部,用于裝載控制系統(tǒng)、電池及其他各種設備,輪式機器人的機械結構如圖1所示。機器人具有四個獨立的運動單元,每個運動單元由一個擺臂、兩個電動輪構成。這兩臺電動輪分別置于擺臂的兩端,一個與地面保持接觸作為驅動輪,另一個則作為從動輪。
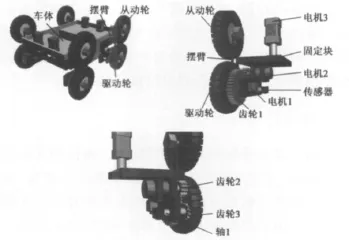
圖1 輪式機器人機械結構
擺臂的內(nèi)置電機為永磁無刷直流電動機,并與減速器構成擺臂傳動鏈帶動擺臂旋轉,可實現(xiàn)擺臂及從動輪繞著驅動輪中心軸做正反向的全周擺動。驅動輪的內(nèi)置電機同樣采用體積小、質(zhì)量輕、輸出扭矩大的無刷電機,經(jīng)減速器輸出至傳動軸,直接驅動車輪轉動。為了實現(xiàn)兩個旋轉運動在驅動軸中心線的傳遞的要求,驅動電機通過與其配套的減速器將驅動動力傳遞給驅動軸,實現(xiàn)機器人平臺的輪式運動所需動力。
為了實現(xiàn)對輪式機器人運動的精確控制,采取了雙閉環(huán)控制方式:①利用無刷電機內(nèi)部的霍爾傳感器,在實現(xiàn)電機正確換相的同時對機器人進行速度閉環(huán)控制;②在機器人應用的每個電機外部均加裝位置傳感器,從而可以進行準確的位置閉環(huán)控制。
2 模糊控制理論
傳統(tǒng)PID控制方法是在閉環(huán)控制之前根據(jù)機器人期望的速度和角速度,求出閉環(huán)控制的左右輪期望速度后再實現(xiàn)兩輪閉環(huán)控制,但當存在車輪打滑擾動時,引起的左右輪速度的偏差將得不到補償,使移動機器人期望的角速度與其實際的角速度出現(xiàn)大的偏差,導致控制效果不理想。模糊控制原理圖[3]如圖2所示。
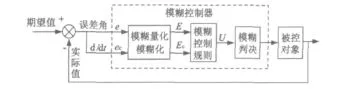
圖2 模糊控制原理圖
模糊控制器由模糊化、模糊推理、反模糊化三個基本部分構成。輸入變量的模糊化就是將輸入的變量確切值轉化為可用模糊集合描述的模糊變量,即確定輸入變量和輸出變量,各變量的模糊狀態(tài),輸入變量的論域、輸入變量實際確切值對應的論域確切值,以及定義各模糊狀態(tài)的隸屬函數(shù)。模糊推理的任務就是利用前面得到的輸入變量的模糊集,根據(jù)專家經(jīng)驗與知識,推導模糊關系,然后根據(jù)模糊關系求出輸出變量。一般情況下模糊控制器的輸出變量是一個模糊集,不能直接用來控制被控對象,需要進行反模糊化轉化成執(zhí)行器可以執(zhí)行的精確量。
3 硬件設計
每個驅動輪的驅動電動機均是二對極的無刷直流電動機,其額定電壓為24 V,額定功率為52 W,為增強電動機的輸出扭矩,加裝有減速比為1∶36的減速器。電動機控制上電后,DSC通過CAN總線接收上位機發(fā)送的指令報文,并采用中斷方式每隔5 ms回傳電動機的運行狀態(tài)到上位機,上位機根據(jù)一定的控制算法產(chǎn)生對功率變換電路進行驅動控制,進而實現(xiàn)對無刷直流電動機轉速的調(diào)節(jié)。為了提高車輛的伺服性能,系統(tǒng)采用PWM雙極性驅動方式對電動機實行驅動控制。
整體設計總體框架如圖3所示,它顯示了硬件電路各部分以及與外設之間的關系。
整個硬件系統(tǒng)主要由電源模塊、DSC控制模塊、功率驅動模塊以及CAN總線通訊模塊等構成。24 V的蓄電池向整個系統(tǒng)供電,其中控制模塊DSC需5 V供電,驅動模塊需要15 V供電,逆變電路需24 V供電,而5 V與15 V電分別是由三端穩(wěn)壓器7805與7815產(chǎn)生。作為控制部分核心的主控芯片dsPIC30F4012,主要完成系統(tǒng)所需要的PID運算,產(chǎn)生一定占空比的脈寬數(shù)字信號PWM以控制電機運行,并實現(xiàn)與上位機的實時數(shù)據(jù)通訊。
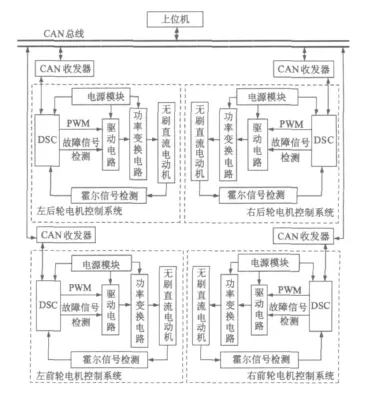
圖3 輪式機器人控制系統(tǒng)組成結構圖
系統(tǒng)驅動電路主要包括了高壓驅動芯片IR2130以及由六個功率MOSFET構成的三相全橋逆變電路。IR2130輸出的六路驅動信號分別加到對應的六個柵極MOS管,觸發(fā)其開通與關斷。驅動電路的功能是將電源的功率以一定邏輯關系分配給無刷直流電動機定子的各相繞組,使電機能夠實現(xiàn)連續(xù)的運轉[4]。為了保障系統(tǒng)的有效運行,控制器還包括故障檢測電路,可實現(xiàn)系統(tǒng)的過流及欠壓等保護。
系統(tǒng)采用CAN總線通訊方式進行數(shù)據(jù)傳輸,CAN模塊采用Philips公司的PCA82C250芯片,實現(xiàn)物理介質(zhì)之間的電氣轉換。系統(tǒng)以PC作為上位機,進行命令的發(fā)送與實時監(jiān)控。上位機接收DSC通過CAN總線發(fā)來的信息,并對這些數(shù)據(jù)信息進行邏輯處理,用以調(diào)整電動機的轉速,進而協(xié)調(diào)左右輪的運動。DSC根據(jù)從上位機下達的指令來控制電動機的換相,并向驅動電路發(fā)送PWM脈沖調(diào)制信號。驅動電路再將DSC發(fā)送的調(diào)制信號進行功率放大,向各個開關管傳送能使其飽和導通與關斷的驅動信號。DSC不斷的采集實時轉速,并根據(jù)轉速來修正上位機給出的控制指令,實現(xiàn)輪式機器人驅動輪的轉速閉環(huán)控制。
4 控制器模糊PID的設計
本文采用模糊技術與PID結合構成模糊PID的控制方法,其基本原理是在普通PID控制器的基礎上,加上一個模糊控制環(huán)節(jié),模糊控制環(huán)節(jié)根據(jù)系統(tǒng)的實時狀態(tài),在線分別調(diào)節(jié)PID的三個參數(shù)。該模糊PID控制器的目的是找出PID控制的三個參數(shù)KP、KI和KD與電機轉速偏差E以及轉速偏差變化率EC之間的模糊關系,在系統(tǒng)運行過程中通過不斷檢測E和EC,根據(jù)模糊控制原理對這三個參數(shù)進行在線修改,以滿足不同E和EC對控制參數(shù)的要求[5]。模糊PID控制器結構如圖3所示。
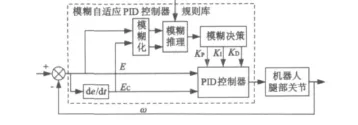
圖4 模糊PID控制器結構圖
PID控制的理想算法:
總之,現(xiàn)代化專業(yè)群建設是高職院校展現(xiàn)自我實力,提高學校就業(yè)率,與區(qū)域產(chǎn)業(yè)有效結合,產(chǎn)業(yè)結構升級發(fā)展的一個專業(yè)集合,它直接體現(xiàn)了高職院校的整體辦學理念,人才培養(yǎng)定位,辦學特色,也是加大構建一流高職院校的主要內(nèi)容,高職院校要結合自身實際特點及區(qū)域內(nèi)產(chǎn)業(yè)發(fā)展需求等多方面因素,科學開展專業(yè)群建設,有效提高高職院校人才培養(yǎng)質(zhì)量和專業(yè)教學水平。

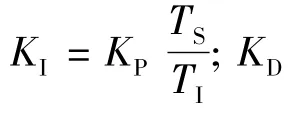
式中:e(t)為設定值與過程值的偏差;KP為比例系數(shù);Ti為積分時間常數(shù);Td為微分時間常數(shù)。
采用DSC編寫PID控制程序,將微分方程進行差分處理,得到增量式PID控制方程:
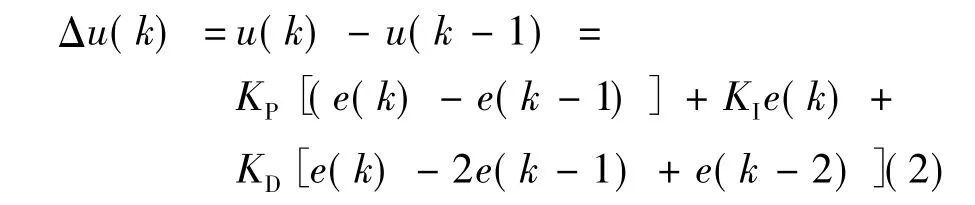
控制算法中無需累加,控制的增量僅與最近k次采樣有關,故產(chǎn)生誤動作時影響較小,且易通過加權法處理得到較好的控制效果。
結合PID控制過程與實驗經(jīng)驗,歸納PID控制三個參數(shù) KP、KI和 KD的模糊化自調(diào)節(jié)原則[7]如下:
(1)KP調(diào)整原則
控制系統(tǒng)控制品質(zhì)的好壞很大程度上取決于比例值的選取。增大KP可加快系統(tǒng)響應速度,減小穩(wěn)態(tài)誤差且可提高控制精度,但KP如果過大將會產(chǎn)生超調(diào),甚至引起系統(tǒng)不穩(wěn)定;減小KP會增大系統(tǒng)穩(wěn)定裕度,減小超調(diào)量,但卻降低了穩(wěn)態(tài)精度,延長了調(diào)節(jié)時間。調(diào)節(jié)初期,KP應適當取較大值從而提高響應速度;調(diào)節(jié)中期,將KP調(diào)至適當值以兼顧穩(wěn)定性以及調(diào)節(jié)速度;調(diào)節(jié)后期,將KP調(diào)整到較小從而減小靜差,以提高系統(tǒng)穩(wěn)態(tài)精度。
積分作用主要用于消除系統(tǒng)的靜態(tài)誤差。增大KI有利于消除系統(tǒng)靜態(tài)誤差,但KI過大又會使超調(diào)增大,不利于系統(tǒng)的穩(wěn)定;減小KI不僅有利于系統(tǒng)穩(wěn)定,也能減小超調(diào),避免振蕩,但卻對消除靜差不利。故調(diào)節(jié)初期,應適當減小KI;調(diào)節(jié)中期,為避免影響穩(wěn)定性,KI應作適度調(diào)整;調(diào)節(jié)后期,應增大KI,以減小系統(tǒng)靜差,從而提高穩(wěn)態(tài)精度。
(3)KD調(diào)整原則
對具較大慣性的被控對象,微分作用可以改善其動態(tài)性能。增大KD有利于加快系統(tǒng)響應速度,減小超調(diào),增加系統(tǒng)穩(wěn)定性,但系統(tǒng)抗干擾能力會下降,同時KD過大還會使系統(tǒng)提前減速,延長了調(diào)節(jié)時間;KD過小,調(diào)節(jié)過程的減速將會滯后,超調(diào)增加,導致系統(tǒng)穩(wěn)定性變差。因此,調(diào)節(jié)初期,增大KD不僅可減小甚者避免超調(diào);調(diào)節(jié)中期,由于調(diào)節(jié)特性對KD變化較敏感,故應適當減小KD;調(diào)節(jié)后期,還應減小KD,從而減小被控過程的制動作用。
5 實驗結果
結合機器人實際控制過程,電機在平穩(wěn)運行狀態(tài)時,設定轉速差E范圍為(-100 r/min,100 r/min),轉速差率EC(-30,30)。隸屬函數(shù)采用三角形函數(shù),解模糊采用重心法,根據(jù)第四節(jié)中的參數(shù)調(diào)整原則總結出KP、KI、KD的模糊自調(diào)節(jié)規(guī)則分別如表1~表3所示。
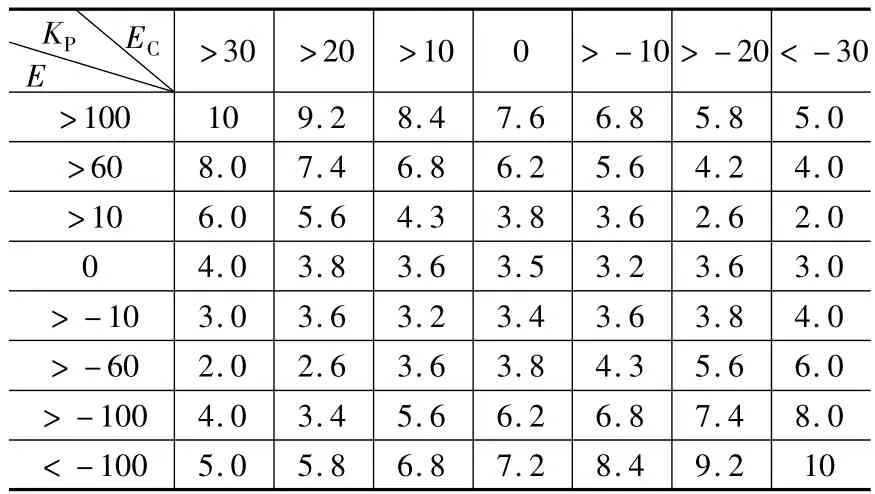
表1 KP模糊自調(diào)節(jié)規(guī)則表

表2 KI模糊自調(diào)節(jié)規(guī)則表
將這三張規(guī)則表存入DSC,供程序運行時調(diào)用,下面說明實際的控制效果。
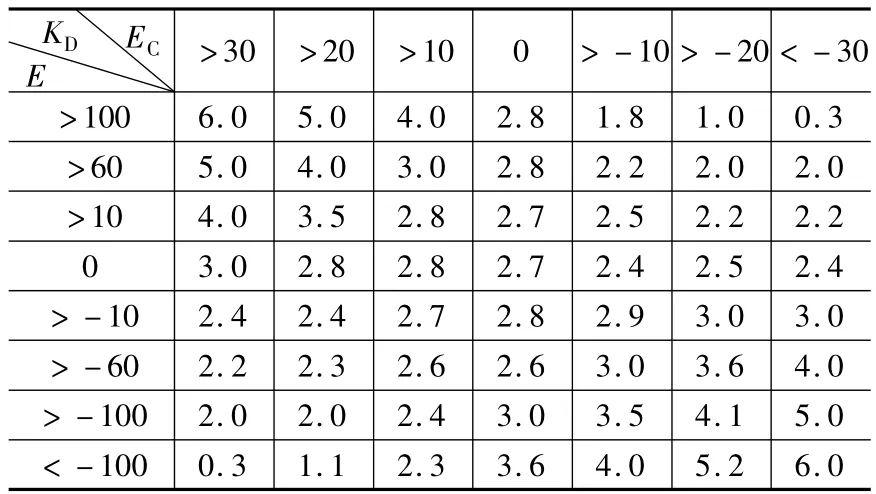
表3 KD模糊自調(diào)節(jié)規(guī)則表
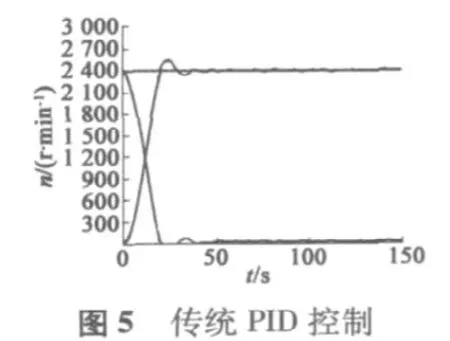
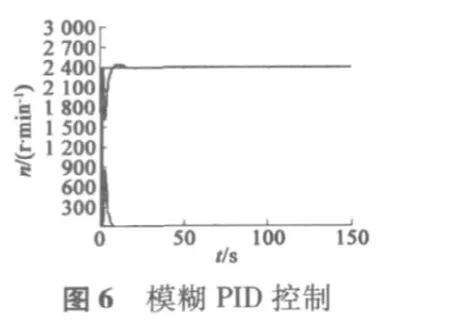
給定電機轉速2 400 r/min,傳統(tǒng)PID控制和模糊PID控制效果分別如圖5、圖6所示,從圖中可以看出,采用模糊PID控制方法上升時間縮短,超調(diào)量減小。
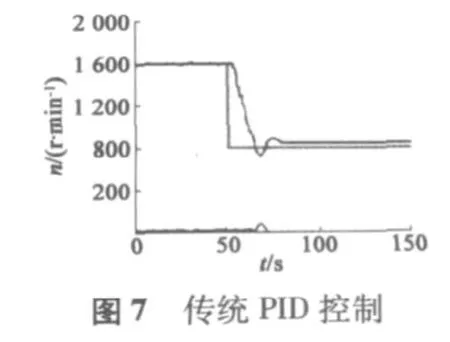
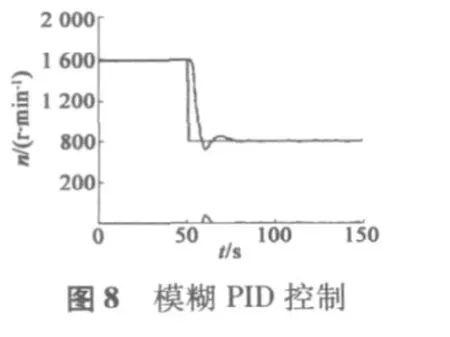
傳統(tǒng)PID控制和模糊PID控制在目標轉速突變時的控制效果分別如圖7、圖8所示。從圖中可以看出,轉速突變時,模糊PID控制的伺服性能更好。
6 結 語
本文以實驗室自行研制的輪式移動機器人為平臺,主要針對其驅動輪的轉速閉環(huán)控制設計了模糊PID控制器。通過試驗證明,該控制器在電機轉速控制的精確性能上優(yōu)于傳統(tǒng)PID控制器;同時該控制器可以有效提高系統(tǒng)的控制精度和伺服性。
[1] 田海波,方宗德,楊坤,等.輪腿式機器人設計及其運動特性分析[J].機械設計,2010,27(6):42 -47.
[2] 高健,黃心漢,彭剛,等.基于FUSS-PID的移動機器人運動控制[J].控制工程,2004,11(6):525 -528.
[3] 章衛(wèi)國,楊向忠.模糊控制理論與應用[M].西安:西北工業(yè)大學出版社,2000.
[4] 陳秀霞,盧剛,李聲晉,等.輪式機器人用無刷直流電機控制系統(tǒng)設計[J].測控技術,2010,29(5):55 -59.
[5] 樊燕君.基于DSP的巡飛彈彈載控制系統(tǒng)設計研究[D].南京理工大學,2007.
[6] 李卓.模糊自適應PID控制方法的研究[D].北京:清華大學,1995.
[7] 于秀麗,王大志.模糊自適應整定PID控制系統(tǒng)[M].沈陽工業(yè)學院學報,2004,23(2):41-44.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
