基于轉子固有高頻信號的同步電動機轉子位置檢測
2011-07-20 03:59:14龐晴晴
微特電機 2011年11期
黃 坤,龐晴晴,王 磊
(中國礦業大學,江蘇徐州221008)
0 引 言
在高性能的同步電動機矢量控制系統中,需要準確地知道轉子位置信息,而轉子位置的檢測一般通過光電編碼器、旋轉變壓器等機械位置傳感器來實現[1]。這些機械位置傳感器的使用又會給調速系統帶來不少問題:
(1)采用機械位置傳感器需要添加額外的裝置,這就大大增加了系統的投入成本;
(2)機械位置傳感器需要安裝在電機的軸上,同心度會影響安裝的問題,安裝不當將影響測速精度;
(3)機械位置傳感器的安裝加大了電機軸向上的體積,使電機結構變得較為復雜,降低了控制系統的機械魯棒性;
(4)由于機械位置傳感器本身受高溫、高濕等惡劣環境的影響很大,因而使得系統的工作精度受到環境條件的影響[2];
(5)此外,機械位置傳感器的使用還加大了系統運行和維護的難度。
為了彌補位置機械傳感器的缺陷,自20世紀70年代起,越來越多的學者開始研究無機械位置傳感器的辨識方法[3]。目前絕大部分無機械位置傳感器研究都是針對永磁同步電動機或者是感應電動機,電勵磁同步電動機的無傳感器控制卻很少提及。
本文針對電勵磁同步電動機提出了一種新穎的無機械位置傳感器的同步電動機轉子位置檢測方法,即轉子側注入高頻信號的位置和速度檢測方法,并且給出了一種轉子側注入高頻信號的實現方法。該方法一方面簡化同步電動機速度閉環控制系統的硬件結構,另一方面提高控制系統可靠性和實用性。
1 基于轉子側高頻信號注入的位置檢測原理
無傳感器的檢測原理即是利用同步電動機自身結構構成傳感器,根據基本的電壓和電流信號以及電機的電磁關系來計算電機位置和速度,達到取代外加的機械傳感器的目的。
如圖1所示,在電勵磁同步電動機的轉子上有一個轉子繞組,定子上有三個對稱分布的定子繞組,因此可以將電勵磁同步電動機本身作為一個旋轉變壓器,轉子繞組即為旋轉變壓器的輸入繞組,定子繞組即為旋轉變壓器的輸出繞組[4],在轉子側輸入高頻信號后,就可以在定子繞組中檢測到相應的高頻響應信號,進而計算出轉子的位置[5]。該方法具體的工作原理分析如下。
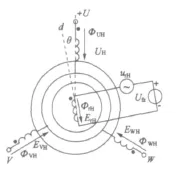
圖1 同步電動機轉子位置測量原理圖
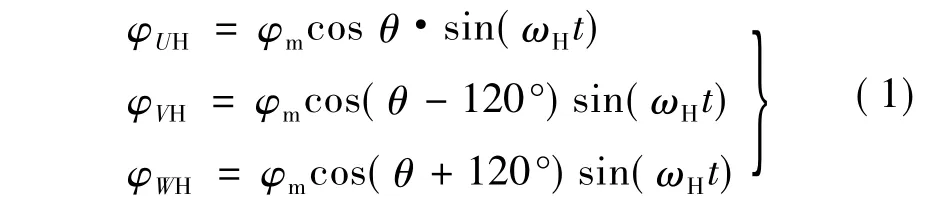
當轉子繞組中疊加角頻率為ωH、有效值為UrH的高頻勵磁信號時,它會在轉子N極軸線(即d軸)方向產生高頻脈振磁場ΦrH=Φmsin(ωHt),該高頻磁場幅值位置會隨轉子位置變化而移動[6]。設d軸與定子U相繞組相軸(即U軸)的空間夾角的電角度為θ,則該高頻脈振磁場分別穿過定子三相繞組的磁通(如圖1所示):
根據變壓器原理可知,該高頻脈振磁場分別在轉子繞組和定子三相繞組感應的電勢(如圖1所示):
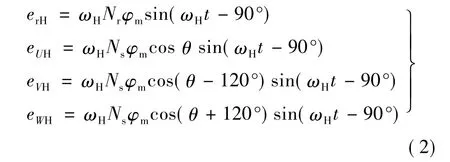
由于高頻電流很小,所以對于漏抗壓降相對高頻感應電勢來說仍然很小,可以忽略繞組漏阻抗。由式(2)可得出轉子和定子繞組的高頻電壓有效值大小:
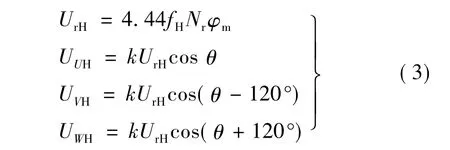
可見,定子三相高頻電壓的頻率和相位與轉子高頻電壓相同,但是有效值按照式(3)變化。
為了計算方便,將定子三相繞組輸出電壓折算到轉子側(即除以電壓比),可以得到定子三相繞組輸出電壓折算值:
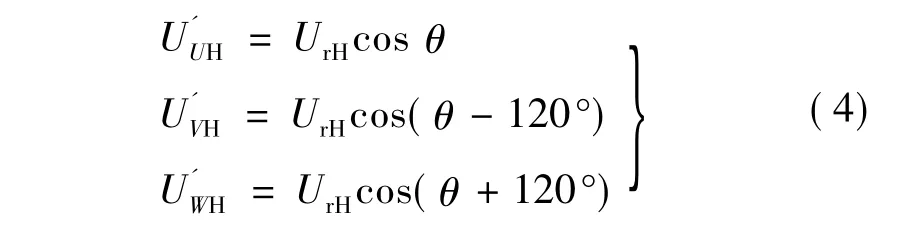
利用式(4),可以得出定子U相高頻電壓和VW高頻線電壓:

利用式(4)可以計算出轉子位置。
利用上述方法判斷出轉子位置角度θ的區間后,再利用式(5)可以計算出轉子位置角度θ的大小,即:

式(6)是利用定子U相高頻電壓和VW高頻線電壓的比值來計算,因此轉子高頻勵磁電壓幅值的大小不影響計算精度。
由于得到的轉子位置角度θ為電角度,在考慮電角度與機械角度的關系后,對時間t的導數進行計算,即可得到轉子的機械速度nr:

式中:p為電機的極對數。
2 無位置傳感器矢量控制系統仿真
基于轉子高頻注入的同步電動機矢量控制系統框圖如圖2所示。系統中沒有傳統的機械位置傳感器。同步電動機的定子繞組與定子功率變換器相連,同步電動機的轉子繞組與轉子功率變換器相連,在同步電動機轉子繞組上注入一個高頻電壓勵磁信號,利用電壓互感器檢測同步電動機定子繞組中含有高頻成分的電壓信號。將該電壓信號通過信號濾波器進行濾波處理,即可得到轉子的位置信號與電機的轉速信號。將其送至系統控制器,系統控制器接收到從濾波器傳來的轉速反饋信號,將其與給定信號進行比較,從而發出控制信號,同時對定子功率變換器和轉子功率變換器進行控制。兩個功率變換器依據系統控制器所發出的控制信號改變其輸出,從而實現快速準確地控制同步電動機的轉速。
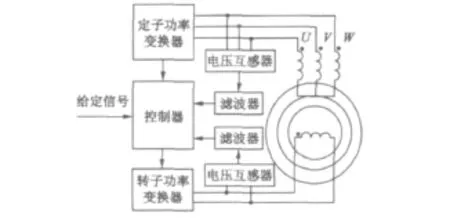
圖2 基于轉子高頻的同步電動機控制系統圖
為了驗證本文提出的無傳感器控制方法的正確性。在Matlab環境下建立了基于轉子高頻注入的同步電動機矢量控制系統仿真模型。仿真中選用的電勵磁同步電動機參數:pN=16 kW;UN=400 V;Uf=12 V;fN=50 Hz;nN=1 500 r/min;Rs=0.645 Ω;Rf=0.396 8 Ω;Lmd=0.052 97 H;Lmq=0.025 18 H。
2.1 基于轉子注入高頻信號的轉子位置檢測
基于轉子注入高頻信號的轉子位置檢測即通過直接對轉子注入高頻電壓信號的方法來對轉子位置進行檢測。仿真過程中,前1 s為電機轉子勵磁階段,1 s時給定轉速,電機起動,2 s時加入負載。注入的高頻正弦電壓的峰值為10 V,頻率為1 kHz。高頻正弦電壓的注入時間為通入勵磁電壓0.1 s以后。
圖3是轉子位置觀測的動態波形。圖中依次為定子側三相電流波形、定子側感應的高頻正弦電壓、定子側感應的高頻余弦電壓、解調得到的轉子位置正余弦包絡線、轉子位置的實際值和觀測值。從轉子位置觀測波形可以看出,轉子側高頻注入之后,轉子位置觀測值很快跟隨上實際值。
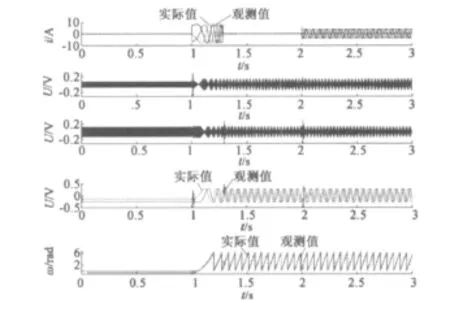
圖3 基于轉子注入高頻信號的轉子位置觀測
2.2 基于轉子固有高頻信號的轉子位置檢測
由于電勵磁同步電動機的轉子繞組一般由三相可控整流橋供電(如圖4所示),而三相可控整流橋輸出的電壓波形中含有豐富的高頻諧波成分,因此可以利用這些高頻諧波分量代替高頻注入信號來對轉子位置進行檢測。在利用轉子固有高頻信號進行轉子位置檢測時,這里首先要對轉子電壓進行諧波分析。
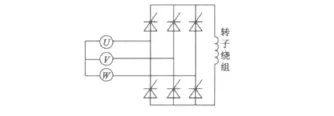
圖4 轉子繞組供電的三相可控整流橋
圖5為仿真中所用三相整流橋模塊,即通過磁鏈調節器輸出的電壓計算得到三相可控整流橋的導通角,再輸出相應的開關控制信號使得三相可控整流橋輸出相應的電壓。
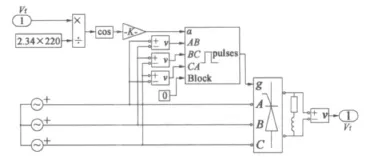
圖5 三相可控整流橋模塊
圖6為由三相可控整流橋供電的轉子電壓波形,在過濾到低頻基波成分后的諧波成分如圖7所示可見,其中的300 Hz高頻諧波信號量在所有諧波成分中是最大的,這是因為三相可控整流橋輸出為一六脈動的電壓信號,其中6 fs分量的諧波成分最為豐富,因此在fs=50 Hz時,300 Hz的分量最大。這里就采用轉子電壓波形中固有的300 Hz高頻分量來進行轉子位置檢測。
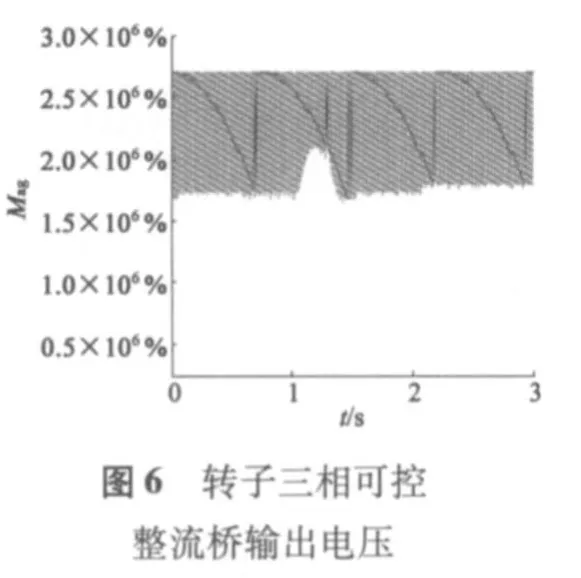
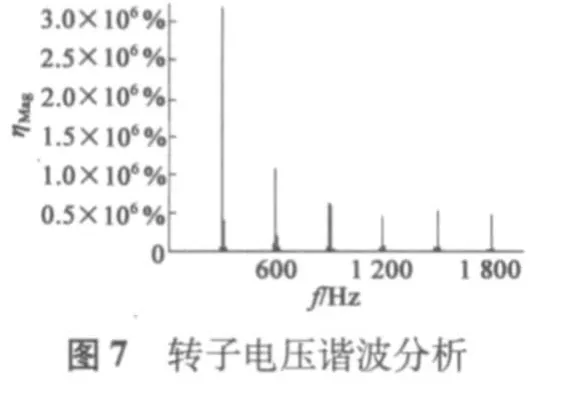
圖8為基于轉子固有高頻信號的轉子位置檢測過程。其中波形從上到下依次為定子側三相電流波形、定子側感應的高頻正弦電壓、定子側感應的高頻余弦電壓、解調得到的轉子位置正余弦包絡線、轉子位置的實際值和觀測值。從轉子位置觀測波形可以看出,轉子側高頻注入之后,轉子位置觀測值很快跟隨上實際值。

圖8 基于轉子固有高頻信號的轉子位置觀測
3 結 語
同步電動機矢量控制系統中的機械位置傳感器存在安裝困難、維護不方便和容易損壞等問題,無傳感器控制技術是解決問題的根本途徑。本文針對電勵磁同步電動機的特殊結構和電磁特點,在提出了基于轉子側高頻信號注入的轉子位置角觀測的無機械位置傳感器方法的基礎上,給出了一種轉子側注入高頻信號的實現方法,即利用電勵磁同步電動機轉子三相可控整流橋輸出電壓中的固有高頻信號來進行轉子位置檢測。本方法利用電勵磁同步電動機的自身結構來檢測轉子位置信號,并通過自身繞組輸出該信號,即在轉子繞組中加高頻勵磁,定子繞組中就會感應與轉子角度相關的高頻信號,通過定子輸出的該高頻信號就可以計算出轉子位置角度和速度。而且利用轉子固有高頻信號來檢測轉子位置解決了實際系統中轉子高頻信號的注入問題,大大加強了本方法的實用性。最后通過仿真分析驗證了本文提出的無機械位置傳感器檢測方法的正確性和實用性。
[1] Sarma S,Agrawal V K,et cl.Instantaneous angular position and speed measurement using a DSP based resolver-to-digital converter[J].Measurement,2008(41):788 - 796.
[2] 李志民,張遇杰.同步電動機調速系統[M].北京:機械工業出版社,1996.
[3] Matthew J,Robert D Lorenz.Rotor Position and Velocity Estimation for a Salient-Pole Permanent Magnet Synchronous Machine at Standstill and High Speeds[J].IEEE Transactions on Industry Applications,1998,34(4):784 -789.
[4] 張俊科.同步機與旋轉變壓器信號幅值的測試[J].微電機,1993,26(1),30 -32.
[5] 萬山明,吳芳,黃聲華.基于高頻電壓信號注入的永磁同步電機轉子初始位置估計[J].中國電機工程學報,2008,33(28):82-86.
[6] 鄧先明,馬志勛,李新宇,等.轉子注入高頻的同步電機無傳感器控制[J].電機與控制學報,2010(10):61-67.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產業(2016年3期)2016-05-17 04:32:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
