計算機導航輔助下轉子間骨折的微創治療
2012-02-23 00:52:08申劍文良元趙立連薛慶云
實用骨科雜志 2012年6期
關鍵詞:手術
申劍,文良元,趙立連,薛慶云
(衛生部北京醫院骨科,北京 100730)
股骨轉子間骨折是髖部的常見骨折[1]。近端髓內固定系統治療轉子間骨折的微創性、有效性是大家所公認的[2,3]。良好的內固定位置和手術微創化關系到骨折愈合、能否早期功能鍛煉及減少術后并發癥,但常規技術需要依靠多次X線監測來完成。本研究是將計算機二維導航技術運用到近端髓內釘固定術,取得較好效果,現報告如下。
1 材料與方法
1.1 一般資料 自2006年8月至2010年9月,我院收治的84例股骨轉子間骨折中 79例為新鮮外傷性骨折,其中 76例采用透視下閉合復位,近端髓內固定(包括 Gamma釘、股骨近端防旋髓內釘、股骨近端膨脹髓內釘)。男 28例,女48例;年齡59~96歲,平均76.8歲。其中計算機導航輔助下手術27例,男10例,女17例,年齡63~89歲,平均78.3歲。骨折Evans分型,Ⅰ型1例(3.7%),Ⅱ型16例(59.26%),Ⅲ型10例(37.04%)。常規方法內固定49例,男18例,女31例,年齡59~96歲,平均76歲。骨折分型:Ⅰ型4例(8.16%),Ⅱ型24例(48.98%),Ⅲ型18例(36.73%),Ⅳ型3例(6.12%)。兩組患者均存在骨質疏松,并存在內科并發癥,術前改善內科情況使之達到符合手術要求。術后常規使用抗生素2~3 d并抗凝。術后使用低分子肝素抗凝。
計算機導航設備及其創傷系列配套的器械(見圖 1)。
1.2 手術方法 兩組病例均采用腰麻、硬膜外或局部神經阻滯麻醉。手術均由同一組醫師完成。首先在C型臂監視下完成骨折閉合復位。a)常規組在大轉子近端切口5~8cm,在C型臂透視下引入髓腔內導針,開髓,插入主釘,透視下調整主釘深度,并確定拉力釘位置、方向、長度,通過手柄上近端瞄準器在透視下打入股骨頸導針,擰入拉力釘。b)導航組在復位完成后需在股骨外上髁或髂前上棘切0.5~1.0 cm大小切口固定參考架,將 C型臂裝上定位靶并同導航儀連接,并將示蹤器及參考架器連至導航儀。用帶有定位靶的C型臂采集患側股骨近端正側位圖像,注冊、校準示蹤器。之后移走 C型臂,通過導航所采集到的圖像在示蹤器引導下于大轉子頂端經皮打入髓腔內導針,切開周圍皮膚2~3 cm,開髓并插入主釘,在示蹤器引導下確定主釘深度、拉力釘位置、方向及長度,通過手柄近端瞄準器打入導針,置入拉力釘,透視驗證內固定位置(見圖2~6)。兩組遠端鎖釘均通過髓內釘自帶手柄遠端瞄準器完成(膨脹釘除外)。
圖1 計算機導航設備及其創傷系列配套器械大體照片
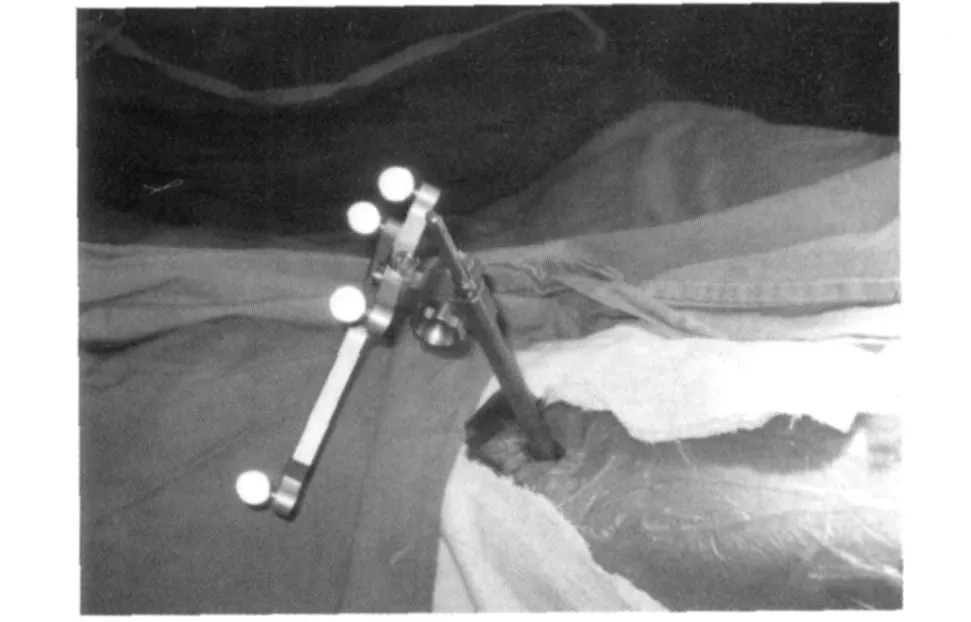
圖2 將參考架予螺釘固定于患肢股骨外上髁松質骨內
1.3 數據收集 對兩組手術切口長度(近端插入主釘的切口長度,拉力釘及遠端鎖釘均在瞄準器輔助下完成,釘口大小兩組基本相同)、術中顯性出血量、手術時間(從骨折復位之后計算)、術中 X線曝光次數(從骨折復位之后計算,導航采集圖像曝光條件與常規組相同)、術后內固定位置等進行比較分析。

圖3 安裝有定位靶的 C型臂采集患髖正側位圖像
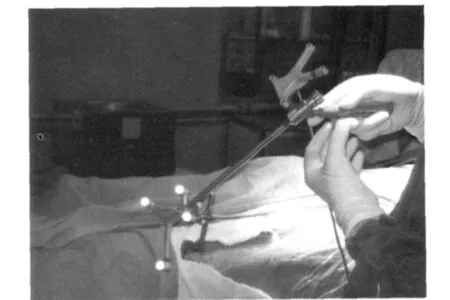
圖4 示蹤器在參考架上完成注冊
2 結 果
兩組患者均成功的完成了手術,未出現術中并發癥。導航組股骨大轉子近端切口長度2.8~4.5cm,明顯小于常規組3.5~8.0cm。導航組術中顯性出血量68~120 mL,小于常規組90~210mL。導航組術中X線曝光次數(復位后)6~12次,明顯少于常規組11~21次(透視均由專業技術人員操作,曝光條件相同)。導航組手術時間55~95min,略少于常規組65~104min。兩組術后內固定位置都符合要求,其中導航組有 2例在插入主釘時引起導航參考架松動造成導航失真,術中發現后重新采集圖像、固定示蹤器、注冊,完成手術。
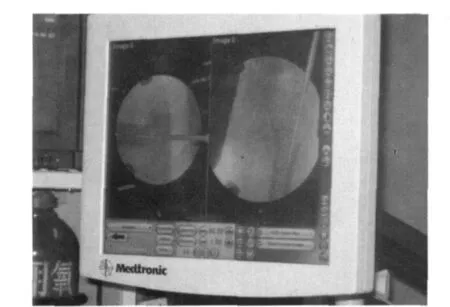
圖5 導航儀屏幕正側位圖像同時顯示主釘導針要插入的位置
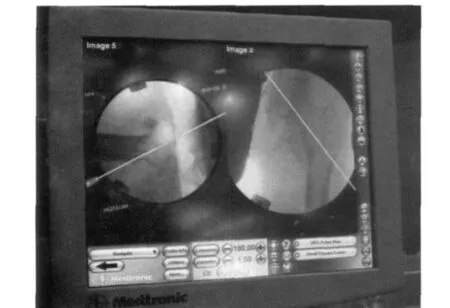
圖6 導航顯示屏正側位同時顯示拉力釘導針將要擰入的位置

表1 手術療效比較
典型病例為一83歲男性患者,在家中衛生間摔倒,診斷為右側股骨轉子間骨折。于入院后 3 d腰麻下行右側導航輔助 PFN A釘內固定術。影像學資料見圖 7~8。
3 討 論
股骨轉子間骨折是髖部骨折中較嚴重的骨折,占全身骨折的3%~4%,占髖部骨折的35.7%[1]。該病好發于老年人,女性多于男性,患者平均年齡70歲,比股骨頸骨折高出5~6歲,65~70歲的男性髖部骨折發生率為18%,女性為27%,78歲以上男性患者上升到 30%,女性為40%[4]。由于多數轉子間骨折患者年老體弱,常常合并心腦血管、血糖、血脂代謝和肝腎等多系統的功能障礙,承受骨折以及手術打擊的能力差,經常在圍手術期出現嚴重的并發癥。股骨轉子間骨折手術的治療目的是恢復骨的連續性,早期康復。而治療過程要求盡可能減少手術創傷,獲得骨折的良好復位,堅強內固定,允許患者盡早離床活動,恢復髖關節的功能,減少因臥床帶來的并發癥,恢復傷前生活質量[5]。很多研究[6,2,3]已證實了髓內固定系統比釘板系統減少了偏心矩帶來的應力增大效應,所以更加穩定。由于創傷小,固定牢固,Gamma釘作為最早的近端髓內固定系統融合了髖螺釘和髓內釘的優點,力矩較短,抗彎應力強,固定方式與生物力學結構更符合股骨近端的應力傳導,減少內固定物折斷風險[2]。在骨質疏松的標本中 Gamma釘比動力髖螺釘減少切割,Gamma釘的最大載荷約為體重的 8.5倍,動力髖螺釘約為6.2倍[7]。

圖7 術前X線片示股骨轉子間骨折

圖8 術后X線片示骨折及內固定位置良好
股骨近端防旋髓內釘通過將髓內主釘加長,變細,其遠端鎖定孔距主釘末端較遠,分散了應力,減少局部的應力遮擋,降低了遠端鎖釘骨干交界處的骨折和鎖釘斷裂的發生率及再骨折率[8,9],并將股骨頸部拉力釘改為螺旋翼片,減少了股骨頸及頭部骨量的丟失,增加了抗切割及抗拔出力[10],同時簡化了操作程序,縮短了手術時間,減小了創傷和出血[11]。多年來研究的方向一直是減少手術創傷和提高骨折內固定的穩定性。同時增加內固定物在骨質疏松性骨組織中的把持力。股骨轉子間骨折采用髓內固定已成為當前手術治療的主流[3],人們通過不斷地改進,推出了操作更方便、創傷更小、術后并發癥更少、更適合老年人的固定器材。
傳統手術的切口主要為了顯露,能使術者完成手術操作,但多是通過較大的切口、廣泛的軟組織剝離或切除來達到這一目的。由于創傷較大,術后難免會產生較多的并發癥,康復過程也較緩慢。術中為了準確定位釘的位置和深度還需要反復透視,增加了醫患的放射性傷害,并且增加了手術野污染的風險。
導航技術源自軍事科技的空間定位系統,手術導航或術中對手術器械實時定位技術的應用可以追溯到20世紀70年代[12],20世紀 90年代計算機導航技術首次運用到骨科脊柱手術中來[13],之后又應用到了人工關節置換、創傷固定及前交叉韌帶重建等領域[14-16]。在導航引導下 ,通過小切口進行手術,可以減少過多的剝離、顯露。因為有實時的圖像信息,有些解剖標志不必再顯露,通過透視,便能準確定位。
導航設備配合其髓內固定治療轉子間骨折提高手術的精準度已有報道[17],許多技術改進尚在探索中。本研究將導航用于股骨近端髓內固定釘,利用導航技術進一步減少粗隆間骨折內固定手術本身的創傷。由于不需要顯露大轉子,縮小了主釘的切口大小,減少了對闊筋膜張肌、臀中肌的剝離、損傷及出血。在計算機導航下,主釘插入的整個過程中都有實時髖部正側位圖像導引,也減少了盲目插入造成的損傷并能將拉力釘在股骨頭頸內的位置調整到理想位置——前后位股骨頭頸中線偏下,側位位于頭頸中間[2],這一點對于防止骨質疏松患者骨組織被切割并且降低骨折界面的旋轉扭力非常重要。由于手術中不需要反復透視觀察進釘的位置和深度,大大減少了術者及患者X線下暴露時間。而且在進行手術操作時可以將 C型臂移開獲得更大的操作空間[17],也減少了因觸碰而增加感染的風險。但同時我們也發現股骨遠端參考架的固定容易松動,可能造成圖像失真,術中要注意各部件的穩定情況,而且引導器同接收器之間的盲區較大,術中時常需要兼顧,加上技術人員對導航設備使用的熟悉程度,都會影響導航手術的效率。
導航與微創技術的應用,從直觀操作過渡到影像引導下的操作,需建立三維空間的定位及定向觀念,熟練掌握需要有一個較長的學習與訓練時間。導航技術在骨科手術中的運用會幫助骨科手術向更加微創和更加精確的方向發展。
[1] 王亦璁.骨與關節損傷[M].第 3版.北京:人民衛生出版社,2001:865.
[2] Leung KS,Chen CM,So WS,et al.Multicenter trial of modified Gamma nail in East Asia[J].Clin Orthop,1996(323):146-154.
[3] Parker M J,Bowers TR,Pryor GA.Sliding hip screw versus the Targon PF nail in the treatment of trochanteric fractures of the hip:a randomised trialof 600 fractures[J].J Bone Joint Surg(Br),2012,94 (3):391-397.
[4] Dharmarajan TS,Banik P.Hip fracture,Risk factors, postoperative assessment, and postoperative management[J].Postgrad Med,2006,119(1):31-38.
[5] 王滿宜.加強股骨近端骨折的臨床研究 [J].中華創傷骨科雜志,2004,6(5):481-483.
[6] Sadowski C,Lubbeke A,Saudan M,et al.Treatment of reverse oblique and transverse intertrochanteric fractures with use of an intramedullary nail or 95° screw-plate[J].J Bone Joint Surg(Br),2002,84(3):372-381.
[7] Haynes RC,Poll RG,Miles AW,et al.Failure of femoral head fixation:A cadaveric analysis of lag screw cut-out with the Gamma locking nail and AO dynamic hip screw[J].Injury,1997,28(6):337-341.
[8] Werner-TutschkuW,Lajtai,Schmiedhuber G,et al. Intra and perioperative complications in the stabilization ofPer and subtrochanteric femoral fractures by mean of PFN[J].Unfallchirurg,2002, 105(10):881.
[9] Boldin C,SeibertFJ,Fankhauser F,et al.The proximal femoral nail(PFN),aminimal invasive treatment of unstable proximal femoral fractures[J]. Acta Orthop Scand,2003,74(1):53-58.
[10] Strauss E,Frank J,Lee J,et al.Helicalblade versus sliding hip screw for treatment of unstable intert rechanteric hip fractures:a biomechanical evaluation [J].Injury,2006,37(10):984-989.
[11] Wen-yue Wang,Tian-fu Yang,Lei Liu,et al.A comparative study of ipsilateral intertrochanteric and femoral shaft fractures treated with long proximal femoral nail antirotation or plate combinations[J]. Orthopaedic Surgery,2012,4(1):41-46.
[12] Schlondorff G.Computer-assisted surgery:Historical remarks[J].Comput Aided Surg,1998,3(4):150-152.
[13] Amiot LP,Labelle H,DeGuise JA,et al.Computerassisted pedicle screw fixation[J].Spine,1995,20 (10):1208-1212.
[14] Digioia AM3rd,Jaramaz B,Plakseychuk AY,et al. Comparison of a mechanical acetabular alignment guide with computer placement of the socket[J].J Arthroplasty,2002,17(3):359-364.
[15] Gautier E,Bachler R,Heini PF,et al.Accuracy of computer-guided screw fixation of the sacroiliac joint [J].Clin Orthop,2001(393):310-317.
[16] Picard F,DiGioia AM,Moody J,et al.Accuracy in tunnel placement for ACL reconstruction:Comparison of traditional arthroscopic and computer-assisted navigation techniques[J].Comput Aided Surg,2001,6(5):279-289.
[17]梁國穗,鄧寧,余浩然.應用透視圖像導航進行Gamma-AP釘手術的早期臨床經驗[J].中華創傷骨科雜志,2004,6(5):491-494.
猜你喜歡
環球時報(2022-12-23)2022-12-23 09:28:37
昆明醫科大學學報(2022年1期)2022-02-28 07:45:04
中老年保健(2021年11期)2021-08-22 03:13:36
昆明醫科大學學報(2021年2期)2021-03-29 07:42:46
河北畫報(2020年10期)2020-11-26 07:20:50
小學閱讀指南·低年級版(2017年1期)2017-03-13 20:07:35
中國衛生標準管理(2015年3期)2016-01-14 03:41:47
中國醫療美容(2015年1期)2015-07-12 10:06:38
鄭州大學學報(醫學版)(2015年2期)2015-02-27 14:50:54
西南軍醫(2014年5期)2014-04-25 07:42:48
