基于DE算法的共軸直升機(jī)模型辨識(shí)及精度分析
2012-06-22 05:43:12蒙志君
北京航空航天大學(xué)學(xué)報(bào)
2012年7期
關(guān)鍵詞:模型
劉 鵬 蒙志君 武 哲
(北京航空航天大學(xué) 航空科學(xué)與工程學(xué)院,北京100191)
近年來,由于共軸直升機(jī)具有機(jī)身結(jié)構(gòu)緊湊、適合在小場(chǎng)地起降、不存在尾槳事故等特點(diǎn),共軸式雙旋翼布局在輕型無人直升機(jī)中應(yīng)用比較廣泛.共軸直升機(jī)飛行動(dòng)力學(xué)模型是開展操穩(wěn)特性分析、飛行實(shí)時(shí)仿真、飛行控制系統(tǒng)設(shè)計(jì)等研究的基礎(chǔ)[1].
目前,關(guān)于單旋翼帶尾槳直升機(jī)的建模研究非常多,也比較成熟[2-3].然而由于共軸直升機(jī)特有的旋翼布局,引發(fā)了上下旋翼之間強(qiáng)烈的氣動(dòng)干擾,使得共軸式雙旋翼空氣動(dòng)力學(xué)問題較單旋翼而言更加復(fù)雜和困難.國(guó)內(nèi)外關(guān)于共軸式直升機(jī)的研究主要集中在雙旋翼氣動(dòng)特性的理論分析和風(fēng)洞試驗(yàn)方面[4-7],而對(duì)共軸直升機(jī)飛行動(dòng)力學(xué)建模的研究非常少.
本文運(yùn)用一種基于微分進(jìn)化算法的頻域系統(tǒng)辨識(shí)方法得到了共軸直升機(jī)懸停狀態(tài)下狀態(tài)空間模型中的氣動(dòng)參數(shù),并利用Cramer-Rao(CR)邊界和不靈敏度的有關(guān)理論對(duì)辨識(shí)參數(shù)進(jìn)行分析計(jì)算,說明辨識(shí)得到的參數(shù)具有較高的精度和可信度,辨識(shí)得到的模型的時(shí)域驗(yàn)證結(jié)果說明了辨識(shí)得到的模型是非常精確的.
1 機(jī)理模型建立
利用小擾動(dòng)理論,得到了共軸直升機(jī)懸停狀態(tài)下含有氣動(dòng)導(dǎo)數(shù)和控制導(dǎo)數(shù)的六自由度線性化狀態(tài)空間模型如下[1,8]:

式中
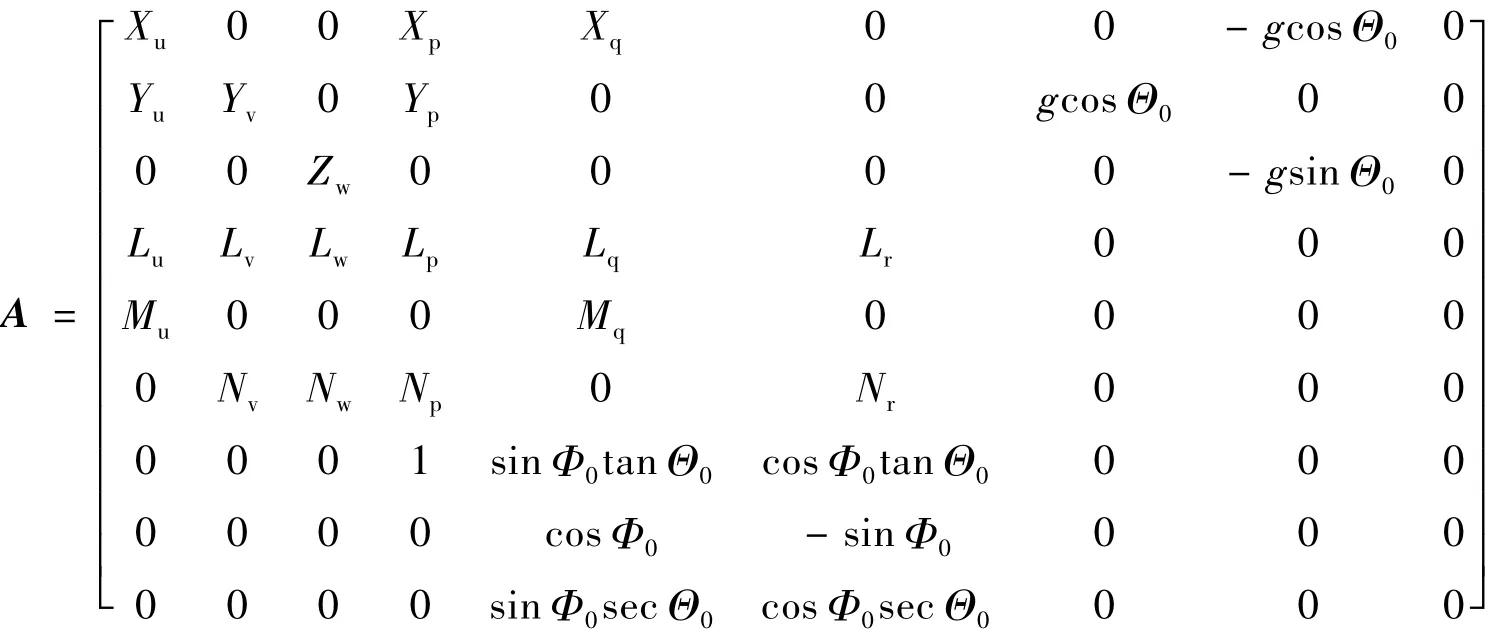
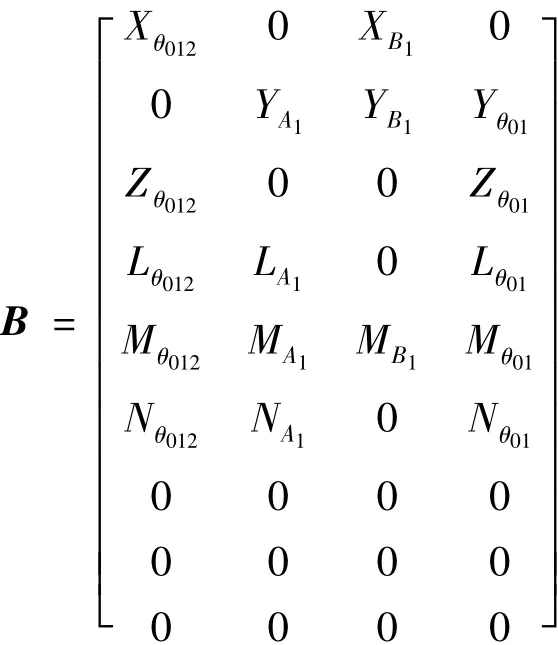
x表示狀態(tài)向量;u表示控制輸入向量;τ為控制量的延遲時(shí)間,具體如下:
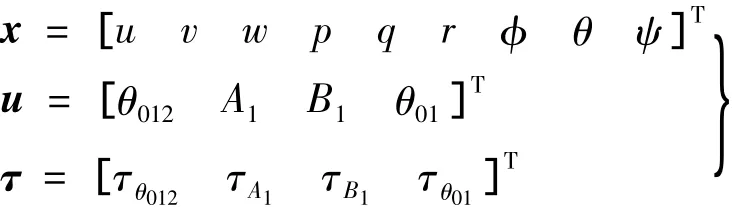
狀態(tài)矩陣A由氣動(dòng)導(dǎo)數(shù)組成,控制矩陣B由控制輸入導(dǎo)數(shù)組成……
登錄APP查看全文
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
中學(xué)數(shù)學(xué)雜志(初中版)(2006年1期)2006-12-29 00:00:00