基于CAN總線的逆變電源分布式并聯(lián)控制
2012-07-04 02:45:02柳彬蔡凱孫朝暉徐正喜
船電技術(shù) 2012年8期
柳彬 蔡凱 孫朝暉 徐正喜
(武漢第二船舶設(shè)計研究所,武漢 430064)
0 引言
交流穩(wěn)定電源使用的逆變電源,除了要求具有比較好的輸出性能指標外,還要求具有比較高的可靠性。以兩臺或多臺逆變電源并聯(lián)組成供電系統(tǒng),共同分擔電網(wǎng)負荷,是提高電網(wǎng)容量的一種有效途徑[1,2]。采用分布式并聯(lián)控制技術(shù)的逆變電源,每臺逆變電源在并聯(lián)系統(tǒng)中作用等同,各自獨立工作,依靠互聯(lián)線進行信息交換或綜合,對自身的輸出電壓幅值、頻率和相位進行調(diào)節(jié),最終實現(xiàn)負載均分。
CAN(Controller Area Network)即控制器局域網(wǎng),其最大特點是對通信數(shù)據(jù)進行編碼,其優(yōu)點是網(wǎng)內(nèi)的節(jié)點個數(shù)在理論上不受限制,還可使不同的節(jié)點同時接收相同的數(shù)據(jù),因此非常適用于逆變電源分布式并聯(lián)系統(tǒng)[3]。
本文提出了一種基于 CAN總線的逆變電源分布式并聯(lián)控制方案,采用該方案的并聯(lián)系統(tǒng)中的各逆變電源通過 CAN總線與其他逆變電源進行信息交換,具有速度快、可靠性高、擴展性好、抗干擾性強等優(yōu)點,系統(tǒng)性能優(yōu)良。
1 逆變電源并聯(lián)等效模型
逆變電源并聯(lián)運行理想狀況是并聯(lián)的逆變電源輸出特性完全一致,對交流電源來說,即輸出電壓的幅值相同,頻率和相位一致。實際上,由于器件參數(shù)的分散性,這一點是很難做到的。由于各逆變電源輸出特性的差異,形成了并聯(lián)系統(tǒng)中的環(huán)流。環(huán)流是并聯(lián)系統(tǒng)難以正常運行的關(guān)鍵所在。逆變電源的并聯(lián)特性分析可以從兩臺逆變電源并聯(lián)等效模型得到,如圖1所示。

圖1 兩臺逆變電源并聯(lián)等效模型
其中 r1、r2為逆變電源輸出等效電阻,L1、L2、C1、C2分別為濾波電感和濾波電容,U1、U2為逆變橋臂輸出的電壓,Z為負載(可為阻性、容性、感性或非線性等)。設(shè) L1=L2=L,C1=C2=C,r1=r2=r。U1和U2輸出為SPWM波,電感電流i1和i2為逆變電源的輸出。
由圖1可以得出:

一般情況下r<<Z,可得:

則并聯(lián)系統(tǒng)中環(huán)流為:

通過該并聯(lián)環(huán)流的表達式我們可以得到如下結(jié)論:環(huán)流?H的相位、幅值大小由兩臺逆變電源的電壓矢量差、等效輸出阻抗r+jωL確定,與負載Z無關(guān)。在實際電路系統(tǒng)中,由于r+jωL僅僅為線路阻抗,值非常小,當兩臺并聯(lián)的電源輸出電壓存在矢量差˙時,將在并聯(lián)電源的輸出端形成較大的電流,該電流流通在并聯(lián)電源之間,形成環(huán)流。進一步地,當ωL>>r時,電壓幅值差主要造成了電源之間的無功環(huán)流,相位差主要造成了電源之間的有功環(huán)流。
2 逆變電源分布式并聯(lián)控制
逆變電源的并聯(lián)控制方式主要包括三大類,即:集中控制方式、主從控制方式和分布式控制方式[1,2]。這些控制方式都是通過某一特定邏輯單元或各并聯(lián)模塊之間相互傳遞均分負荷信息,在確知總的負載信息或某一并聯(lián)綜合信息的前提下對逆變電源的輸出進行調(diào)節(jié),實現(xiàn)并聯(lián)系統(tǒng)的穩(wěn)定運行。
逆變電源分布式并聯(lián)控制方式,相對于集中控制方式,由于沒有集中控制單元,更易實現(xiàn)擴展和冗余;相對于主從控制方式,由于分布式控制方式中每臺逆變電源地位的均等性,其中任何一臺失效都不會影響到并聯(lián)系統(tǒng)的正常運行,大大提高了并聯(lián)系統(tǒng)的可靠性。一種逆變電源分布式并聯(lián)控制原理如圖2所示。

圖2 逆變電源分布式并聯(lián)控制框圖
圖2表示了逆變電源分布式并聯(lián)控制系統(tǒng)中某一臺逆變電源的并聯(lián)控制過程。逆變電源在獲取了并聯(lián)系統(tǒng)中其它逆變電源的有功功率和無功功率信息后,和本機計算得到的功率信息一起進行綜合,得到并聯(lián)系統(tǒng)中每臺逆變電源應輸出的有功功率和無功功率指令。通過功率調(diào)節(jié)器,將功率差轉(zhuǎn)化為逆變電源輸出的幅值和相位(頻率)的變化量,疊加到逆變電源的指令上,從而影響逆變電源的輸出,最終使得各臺逆變電源的有功功率和無功功率實現(xiàn)均分。圖2中采用了有功功率閉環(huán)調(diào)節(jié)電壓相位(頻率),無功功率閉環(huán)調(diào)節(jié)電壓幅值的控制方式。
3 基于CAN總線通訊的信息交換方式
逆變電源分布式并聯(lián)控制系統(tǒng)中,逆變電源之間的信息交換可以通過多種方式進行,可以是脈寬方式進行邏輯綜合或者是模擬信號方式求均值,也可以通過通訊方式進行。本文提出了一種基于 CAN總線通訊的并聯(lián)信息交換方式,與其它通信總線相比,CAN總線具有多主運行和分散仲裁以及廣播通信的特點。CAN總線上任意節(jié)點可在任意時刻主動地向網(wǎng)絡(luò)上其它節(jié)點發(fā)送信息而不分主次,因此可以在各節(jié)點之間實現(xiàn)自由通信。
并聯(lián)系統(tǒng)中的各逆變電源將各自的并聯(lián)信息用數(shù)字形式,采用總線廣播方式發(fā)送到 CAN總線上,每臺逆變電源均能接收到其它單元的并聯(lián)信息,包括功率、設(shè)備狀態(tài)、開關(guān)量以及通訊正常指示等信息,然后將接收到的功率信息進行綜合,解耦出本機輸出的電壓調(diào)節(jié)量和相位調(diào)節(jié)量,進行并聯(lián)控制。圖3顯示了基于CAN總線的逆變電源分布式并聯(lián)控制框圖。

圖3 基于CAN總線的逆變電源分布式并聯(lián)控制框圖

圖4 CAN總線接口電路
CAN總線收發(fā)器采用 PHILIPS公司的總線接口芯片PCA82C250,接口電路圖如圖4所示。
4 試驗結(jié)果
由兩臺三相逆變電源組成分布式并聯(lián)系統(tǒng),在此基礎(chǔ)上進行了試驗驗證。逆變電源并聯(lián)控制CAN總線每一個基波周期(20 ms)發(fā)送和接收一次數(shù)據(jù),CAN總線通訊波特率選擇250 kbps。兩機并聯(lián)條件下CAN總線波形如圖5所示。
兩機并聯(lián)時分別由兩臺設(shè)備發(fā)送到總線的兩個數(shù)據(jù)幀如圖6所示。試驗中數(shù)據(jù)幀為標準幀格式,其中數(shù)據(jù)段為8個字節(jié)64位,數(shù)據(jù)幀還包括ID段、控制段和CRC段等,共108位,因此每幀長度為1/250 k×108=432 μs。兩機并聯(lián)輸出電壓和電流波形如圖7所示,輸出電壓為380V 50 Hz,輸出總電流為260 A,兩機各承擔130 A電流,其中環(huán)流iH不大于30 A,并聯(lián)系統(tǒng)性能優(yōu)良。
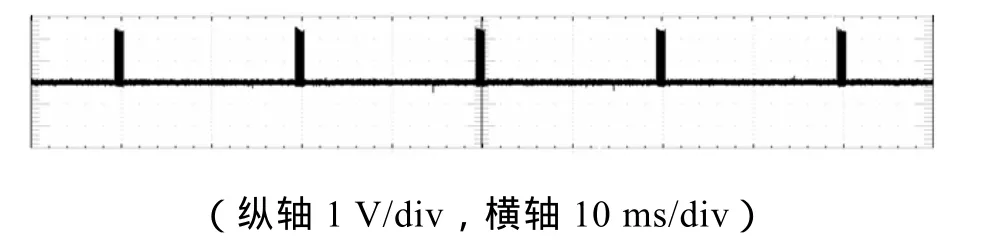
圖5 兩機并聯(lián)CAN總線波形

圖6 CAN總線波形展開圖

圖7 兩機并聯(lián)輸出電壓和電流波形
5 結(jié)論
以兩臺或多臺逆變電源組成供電系統(tǒng),并聯(lián)冗余運行,共同分擔電網(wǎng)負荷,在提高電網(wǎng)容量的同時也提高了供電系統(tǒng)的可靠性。
本文提出的基于 CAN總線的逆變電源分布式并聯(lián)控制方案,解決了分布式并聯(lián)系統(tǒng)中各并聯(lián)單元之間的信息交換問題。CAN總線協(xié)議具有速度快、可靠性高、擴展性好、抗干擾性強等優(yōu)點,并且很容易嵌入到逆變電源數(shù)字控制系統(tǒng)中。該控制方案可以擴展到多臺逆變電源組成的并聯(lián)系統(tǒng)中,擴容簡便,可移植性強,具有很好的工程應用前景。
[1]陳宏, 胡育文. 逆變電源并聯(lián)技術(shù)[J]. 電工技術(shù)學報, 2002, 17(5): 55~59.
[2]李杰, 王武等. UPS逆變電源的并聯(lián)控制技術(shù)綜述[J]. 通信電源技術(shù), 2005(8): 7~10.
[3]王曉寰, 張純江等. 現(xiàn)場總線控制的單相逆變電源并聯(lián)系統(tǒng)[J]. 電工技術(shù)學報, 2007(10): 109~112.
[4]段善旭, 康勇, 陳堅. UPS模塊化電源系統(tǒng)并聯(lián)控制策略分析[J]. 電工技術(shù)雜志, 2004, 26(1): 46~50.
[5]段善旭, 劉邦銀等. 基于分散邏輯的 UPS逆變電源并聯(lián)控制技術(shù)[J]. 電力電子技術(shù), 2004(2): 56~58.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
