一種并聯(lián)逆變電源的控制技術(shù)
2012-07-04 02:45:20宋義超高嵬
船電技術(shù) 2012年8期
宋義超 高嵬
(1.海軍駐武漢438廠軍代室, 武漢 430064;2. 海軍工程大學(xué), 武漢 430033)
0 引言
逆變電源的并聯(lián)策略有很多,有主從結(jié)構(gòu)[1],用電壓型逆變器作為主模塊控制系統(tǒng)電壓,電流型逆變器提供負(fù)載電流。有對(duì)等式,并聯(lián)的各個(gè)逆變器結(jié)構(gòu)功能相同,相互間有信號(hào)的傳遞,但不存在隸屬關(guān)系。還有基于有功無(wú)功調(diào)節(jié)的無(wú)連線并聯(lián)方式[2]。隨著控制技術(shù)的發(fā)展,高速數(shù)字處理芯片DSP的出現(xiàn),實(shí)現(xiàn)高質(zhì)量的交流輸出已經(jīng)不成問題;但是如何實(shí)現(xiàn)逆變器的冗余設(shè)計(jì)依然是困擾開發(fā)者的主要問題,目前市場(chǎng)上流行的逆變器的并聯(lián)技術(shù)是采用系統(tǒng)監(jiān)控器統(tǒng)一產(chǎn)生SPWM信號(hào)進(jìn)行同步和負(fù)載均分的,這種逆變器的技術(shù)缺點(diǎn)是:?jiǎn)文孀兤鞑荒芄ぷ鳎仨毰浜拖到y(tǒng)的監(jiān)控器才能工作,因此小系統(tǒng)的性能價(jià)格比不高;系統(tǒng)的可靠性取決于系統(tǒng)監(jiān)控器的可靠性,監(jiān)控器一旦損壞,整個(gè)系統(tǒng)將癱瘓;交流輸出不能短路,短路將會(huì)造成逆變器燒毀的危險(xiǎn)。
1 無(wú)主可并聯(lián)逆變控制方式
逆變器可采用的控制方法種類繁多,每一種控制方法都有其優(yōu)缺點(diǎn)。同時(shí)采用不同的控制方法形成復(fù)合控制,可以實(shí)現(xiàn)取長(zhǎng)補(bǔ)短、優(yōu)勢(shì)互濟(jì)的目的,因此,復(fù)合控制是逆變器控制方法的一個(gè)發(fā)展趨勢(shì)。隨著控制理論和數(shù)字處理芯片的迅速發(fā)展,使各種先進(jìn)控制方法的實(shí)現(xiàn)成為可能,逆變器的數(shù)字化控制方法成了今后交流電源領(lǐng)域中的一個(gè)研究熱點(diǎn)和發(fā)展趨勢(shì)。本方案采用各種控制方法相結(jié)合的復(fù)合控制,自同步和外同步結(jié)合的全新原理設(shè)計(jì),其優(yōu)點(diǎn)是可靠性高;可單機(jī)使用也可組屏,配置方便;采用電子開關(guān)外掛方式,方便組成UPS、EPS等其它形式的逆變電源;系統(tǒng)監(jiān)控有三個(gè)可以錯(cuò)相120度的同步信號(hào),方便組合成三相逆變電源系統(tǒng);并且三相單獨(dú)調(diào)節(jié),每相可帶100%不平衡負(fù)載。
2 硬件設(shè)計(jì)部分
可并聯(lián)逆變模塊硬件電路由功率處理主電路、控制驅(qū)動(dòng)電路、保護(hù)電路組成,系統(tǒng)原理框圖如圖1,DC/DC變換電路為BOOST電路,采用高頻環(huán)進(jìn)行逆變,因而無(wú)須采用工頻變壓器,使體積減小,其作用是利用 DC-DC全橋高頻隔離升壓將直流220V電壓變換成PWM整流逆變電路所需要的電壓,供后級(jí)的全橋逆變使用,其控制系統(tǒng)結(jié)果如圖2所示。輸出給定電流Ug與實(shí)際的輸出電壓Uk相比較后,其誤差信號(hào)經(jīng)PI調(diào)節(jié)器后與鋸齒波比較形成PWM信號(hào),該信號(hào)再經(jīng)驅(qū)動(dòng)電路去控制 BOOST電路中的開關(guān)器件IGBT,便可使實(shí)際的輸出電壓跟蹤給定電壓。本系統(tǒng)采用PWM控制器SG3524獲得PWM控制信號(hào)[3]。
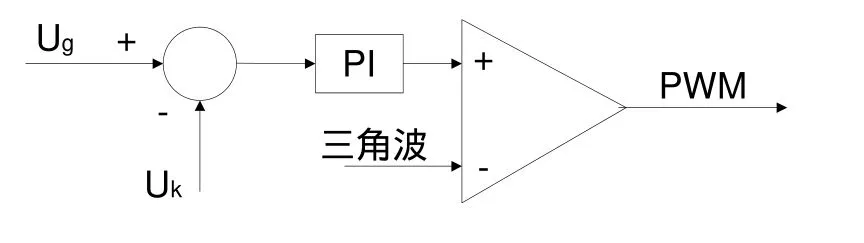
圖2 DC/DC變換電路控制結(jié)構(gòu)簡(jiǎn)圖
逆變器的功率處理采用全橋電路,經(jīng)過SPWM調(diào)制以后,輸出經(jīng)過濾波電感和電容濾波以后,直接和其它逆變器的輸出進(jìn)行并聯(lián),當(dāng)要求和電網(wǎng)進(jìn)行快速切換的時(shí)候,系統(tǒng)主監(jiān)控指揮電子切換箱的開關(guān)動(dòng)作,實(shí)現(xiàn)與電網(wǎng)的旁路切換。控制電路28335完成SPWM波形的產(chǎn)生、鎖相、控制、均流以及同步信號(hào)捕捉、數(shù)據(jù)采樣等功能。使用其內(nèi)部的模/數(shù)轉(zhuǎn)換模塊對(duì)輸出電壓反饋信號(hào)進(jìn)行采樣,通過數(shù)字PI控制器完成電壓有效值外環(huán)控制,保證輸出電壓有效值穩(wěn)態(tài)無(wú)差。PI控制器的輸出乘以標(biāo)準(zhǔn)給定信號(hào),經(jīng)數(shù)/模轉(zhuǎn)換后作為控制電路模擬部分的參考輸入信號(hào)。主從設(shè)置法和平均電流法都無(wú)法實(shí)現(xiàn)冗余技術(shù),使并聯(lián)電源模塊系統(tǒng)的可靠性得不到很好的保證;而采用自主均流芯片UC3902依據(jù)特有的性能,如:“均流精度高,動(dòng)態(tài)響應(yīng)好,可以實(shí)現(xiàn)冗余技術(shù)等”,自主均流法實(shí)質(zhì)上是在N個(gè)并聯(lián)的模塊中,輸出電流最大的模塊將自動(dòng)成為主模塊,其余的模塊則成為從模塊,各個(gè)從模塊的電壓誤差依次被整定,以調(diào)節(jié)負(fù)載電流分配的不均衡。由于N個(gè)并聯(lián)的模塊中,事先沒有人為設(shè)定哪個(gè)模塊為主模塊,而是按輸出電流的大小隨機(jī)排序,輸出電流大的模塊自動(dòng)成為主模塊。本控制系統(tǒng)采用此芯片可以直接得到均流誤差信號(hào),簡(jiǎn)化了控制系統(tǒng)復(fù)雜的電流計(jì)算,提高了系統(tǒng)可靠性。
3 軟件設(shè)計(jì)部分
控制部分主程序主要完成開機(jī)檢測(cè)、均流計(jì)算、同步捕捉、計(jì)算調(diào)制度,輸出SPWM波、限流保護(hù)策略。
3.1 均流計(jì)算
從理論上講 DC/AC逆變模塊的并聯(lián)條件是:各模塊輸出電壓的頻率、相位和幅值以及內(nèi)阻完全相同,才能實(shí)現(xiàn)并聯(lián)運(yùn)行,并聯(lián)模塊輸出的電流、功率完全均衡。實(shí)際系統(tǒng)中,由于各模塊硬件的分散性是不可避免的,各模塊的基準(zhǔn)正弦信號(hào)的頻率和幅值也會(huì)有微小差異;以上差異都會(huì)導(dǎo)致各模塊輸出電壓的相位和幅值不等;相位差會(huì)引起模塊之間產(chǎn)生有功環(huán)流,幅值差會(huì)引起模塊間產(chǎn)生無(wú)功環(huán)流。由無(wú)功功率公式

可知(其中N為系統(tǒng)中并聯(lián)模塊總數(shù),n表示第n個(gè)模塊,cosφ為功率因數(shù),是均流差值),減少即可減少無(wú)功環(huán)流。無(wú)功功率電流調(diào)節(jié)可采用功率偏差控制策略,逆變器通過模塊檢測(cè)出本模塊的均流偏差值,來(lái)調(diào)節(jié)本模塊輸出的電壓值,使各個(gè)并聯(lián)逆變器模塊輸出的無(wú)功功率相等,達(dá)到均流的目的。為了使得每個(gè)并聯(lián)逆變器的電流達(dá)到均等地目的,在每個(gè)并聯(lián)逆變器的控制環(huán)上除了電壓控制環(huán)之外還加了一個(gè)均流環(huán)。控制框圖如下圖3所示。在均流控制中,均流差值信號(hào)由均流芯片uc3902給出,均流環(huán)采用不完全微分PID控制,以減小由于單個(gè)模塊數(shù)據(jù)錯(cuò)誤而對(duì)整個(gè)系統(tǒng)的沖擊。為保證實(shí)際均流的可行性和調(diào)整范圍,采用模糊控制的思想,限定均流實(shí)際輸出的電壓在一定范圍之內(nèi)(即調(diào)整后的實(shí)際輸出電壓在標(biāo)準(zhǔn)電壓內(nèi)),這樣可以保證均流的可靠性。同時(shí)單步調(diào)整的幅度不能過大,一般在1V以內(nèi),否則會(huì)引起較大的環(huán)流波動(dòng)。

圖3 系統(tǒng)閉環(huán)控制
3.2 同步控制策略
逆變電源系統(tǒng)中,為抑制模塊間環(huán)流的影響,必須保證各逆變模塊輸出電壓的相位、幅值及頻率的一致性,這是實(shí)現(xiàn)并機(jī)控制的前提。本系統(tǒng)可并聯(lián)逆變器采用自同步和外同步結(jié)合的全新原理設(shè)計(jì)如圖 4,在有外部同步信號(hào)的時(shí)候,逆變器輸出可以跟蹤電網(wǎng)同步或監(jiān)控器給定的同步;在同步控制單元檢測(cè)一段時(shí)間如果沒有外同步信號(hào),同步信號(hào)線自動(dòng)切換到自激電路,保證監(jiān)控單元出現(xiàn)故障也能夠正常工作。這種同步控制方式即使有某個(gè)模塊因?yàn)楣收蠐p壞不能輸出同步信號(hào),也不影響并聯(lián)運(yùn)行,從而實(shí)現(xiàn)了內(nèi)同步和外同步相結(jié)合的同步機(jī)制,這是本系統(tǒng)一大特點(diǎn)。逆變器用 2407A 的捕獲單元,通過捕獲同步脈沖,在中斷程序中完成與市電相位、頻率的同步。
3.3 SPWM控制策略:
在實(shí)際設(shè)計(jì)過程中,采用事件管理器(假設(shè)EV2)中的1個(gè)全比較單元、通用定時(shí)器3、死區(qū)發(fā)生單元以及輸出邏輯來(lái)生成單相四路 SPWM波,經(jīng) 4個(gè)復(fù)用的I/O引腳輸出。TMS320LF2407A的定時(shí)器有4種工作方式,采用連續(xù)增/減計(jì)數(shù)方式工作時(shí),將產(chǎn)生對(duì)稱的SPWM波輸出。在這種計(jì)數(shù)方式下,計(jì)數(shù)器的值由初值開始向上增計(jì)數(shù),當(dāng)?shù)竭_(dá)T3PR值時(shí),開始遞減計(jì)數(shù),直至計(jì)數(shù)器的值為零時(shí)(進(jìn)入中斷服務(wù)程序)又重新向上增計(jì)數(shù),如此循環(huán)往復(fù)。在計(jì)數(shù)器計(jì)數(shù)的過程中,計(jì)數(shù)器的值都與比較寄存器CMPRx (x=4,5)的值作比較,當(dāng)計(jì)數(shù)器的值與其相對(duì)應(yīng)的比較寄存器的值相等發(fā)生匹配,則對(duì)應(yīng)的該相方波輸出發(fā)生電平翻轉(zhuǎn)。在每個(gè)載波周期內(nèi),輸出的方波將發(fā)生兩次電平翻轉(zhuǎn)。只要在每個(gè)三角波載波周期根據(jù)在線計(jì)算改寫比較寄存器CMPRx的值,就可實(shí)時(shí)地改變脈沖的占空比,得到完整周期的SPWM脈沖。對(duì)每個(gè)脈沖相對(duì)于載波周期的占空比的計(jì)算是在定時(shí)器的中斷服務(wù)子程序中完成的。
3.4 限流保護(hù)策略
限流保護(hù)采用硬件和DSP軟件雙重保護(hù),DSP軟件保護(hù)采用預(yù)測(cè)控制限流技術(shù),在電流上升過程中,根據(jù)去除采樣點(diǎn)的異常電流值后的連續(xù)采樣電流值和連續(xù)采樣電流值的斜率與設(shè)定值進(jìn)行比較,預(yù)測(cè)電流是否出現(xiàn)過流的情況,對(duì)過流可以提前進(jìn)行判斷和處理,使輸出控制軟件產(chǎn)生電流波形無(wú)限逼近標(biāo)準(zhǔn)波形,大大減少了諧波電流,從而更好的保護(hù)負(fù)載正常工作運(yùn)行,硬件保護(hù)采用驅(qū)動(dòng)模塊 HCPL-316J自帶的過流檢測(cè)電路,主要在軟件限流失效或者過流上升速度非常快的情況下起保護(hù)作用。采用雙重限流保護(hù),能夠大大提供系統(tǒng)工作的安全性和可靠性。

圖4 同步控制電路
4 試驗(yàn)結(jié)果及分析
圖5 (1)直流輸入和升壓后電壓波形

圖5 (2)同步波形
圖5(1)為直流輸入和DC/DC升壓后電壓波形,電壓紋波較小,基本平直,當(dāng)電壓有輕微抖動(dòng)時(shí),通過直流電壓幅值反饋的調(diào)節(jié)使電壓保持穩(wěn)定,保證了良好的動(dòng)態(tài)響應(yīng)。圖5(2)為模塊與市電同步波形圖,兩者相位相差接近為0,較好的保證了并聯(lián)。
圖6為并聯(lián)模塊圖,可以看出,基本成分近似為正弦,畸變很小,并聯(lián)效果好。
5 結(jié)論
本系統(tǒng)主控制芯片TI公司的dsp28335全數(shù)字化設(shè)計(jì),控制元件少,穩(wěn)定度高,高可靠性SPWM驅(qū)動(dòng)信號(hào)輸出,采用UC3902芯片均流技術(shù),各逆變單元獨(dú)立工作,民主均流,簡(jiǎn)化了大量的軟件計(jì)算,大大提高了均流精度,并機(jī)安裝方便。采用自同步和外同步結(jié)合的全新原理設(shè)計(jì),單個(gè)模塊和監(jiān)控故障不影響其他模塊正常工作,大大提高了系統(tǒng)可靠性。可實(shí)現(xiàn)N+1逆變單元并聯(lián)擴(kuò)容,電源的容量大大提高。可帶電熱更換,操作維護(hù)方便。
[1]邢巖. 逆變器并聯(lián)運(yùn)行系統(tǒng)的研究[D].南京航空航天大學(xué)博士學(xué)位論文, 1999.1
[2]陳宏. 逆變電源并聯(lián)技術(shù)[J].東南大學(xué)學(xué)報(bào),2002.p.55~59.
[3]李永富.高頻開關(guān)有源逆變技術(shù)[J].直流電源,2004.p.39~44.
[4]TMS320F28335使用手冊(cè)[M]. 德州儀器, 2009.
[5]UC3902使用說(shuō)明書[M]. UC, 2005.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
