
機槳一體化推進電機的設計與分析
2012-07-04 02:45:20劉建波黃劉瑋李耕
船電技術 2012年8期
關鍵詞:電磁場
劉建波 黃劉瑋 李耕
(1. 海軍駐上海江南造船集團有限責任公司軍代室,上海 202150;2. 海軍工程大學電氣與信息工程學院,武漢 430033)
0 引言
由于傳統船舶推進系統的效率低、噪聲高、占用空間大、可靠性低以及靈活性差等問題日漸突出,人們將目光轉向更先進的推進方式—電力推進,吊艙的出現則被視為電力推進領域的里程碑。然而,上述推進方式仍不能完全勝任,人們迫切需要一種新的推進模式來改善船舶舒適性和推進器體積,以及滿足軍事上對艦船和潛艇隱身、推進性能的苛刻要求。
機槳一體化裝置,又稱電機推進器綜合體(Integrated Motor Propulsor,簡稱 IMP),是隨著吊艙技術的發展而出現在船舶電力推進領域中的新型推進形式。其設計思想是螺旋槳外緣與電機轉子內緣相接,電機定子外緣與機座外罩內緣相接,整個裝置作為獨立的單元置于船舶和潛艇的底部或尾部(有時可置于船體內部),直接放在水中[1-4]。
本文針對自行設計的一臺22.5 kW機槳一體化推進電機展開研究,建立推進電機的有限元計算模型,采用適合此類特殊電機電磁場計算方法,對電機的空載及負載磁場分布、空載反電勢、氣隙磁密以及負載時的運行特性進行研究,得到的計算結果可作為此類電機設計的參考。
1 機槳一體化推進電機設計
所設計的機漿一體化水下推進器的結構示意圖如圖1所示。主要由機座、管道狀吸聲機構和電機螺旋槳一體化裝置三部分組成,在機座和管道間有橡膠減震隔離層。在轉子內部嵌有螺旋槳(泵葉),水泵沒有中心軸,轉子的定位和支撐是由氣隙中的軸向和徑向軸承完成的;定轉子氣隙間有水流過,帶來良好冷卻條件的同時,也提高了對絕緣材料性能的要求。
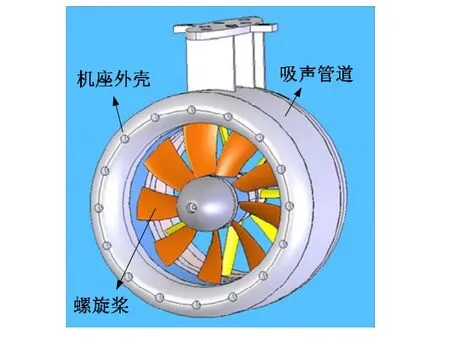
圖1 機槳一體化水下推進器示意圖
電機部分的基本結構參數如表1所示。
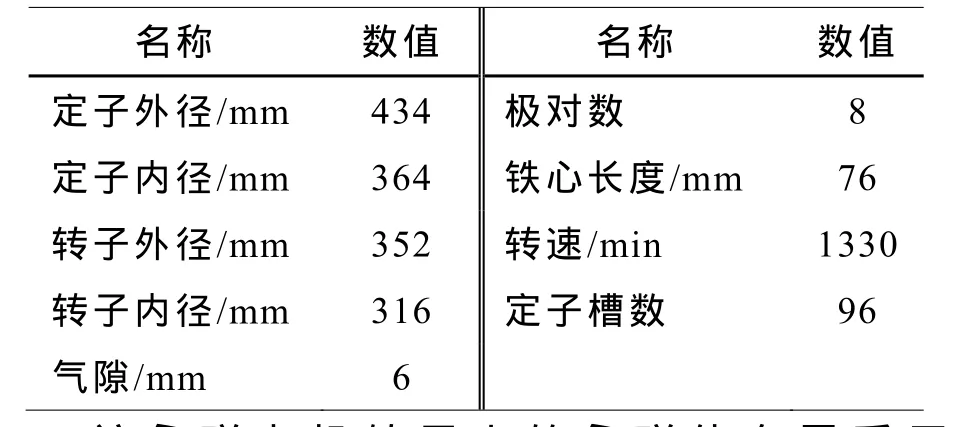
表1 電機基本結構參數
該永磁電機轉子上的永磁體布置采用Halbach結構,每極有兩塊磁鋼構成,其中一塊為徑向充磁,另一塊切向充磁。采用Halbach結構可使電機氣隙磁密得到加強,而轉子軛部磁密反而減小。轉子軛部采用實心結構,轉子的背環與槳葉為同一個鑄件體,均為不導磁的黃銅材料。其結構如圖2所示。
2 IPM推進電機電磁場計算
電機電磁場的計算一般歸結為某些偏微分方程的求解。求解偏微分方程必須結合具體問題的特定邊界條件才能獲得唯一的解答。求解的過程較為復雜,考慮到實心轉子永磁同步電動機設計精度高的要求,本文采用有限元法對電機的電磁場進行數值計算。電機在如圖2所示的一對極內,穩態電磁場的問題可表示成邊值問題為:
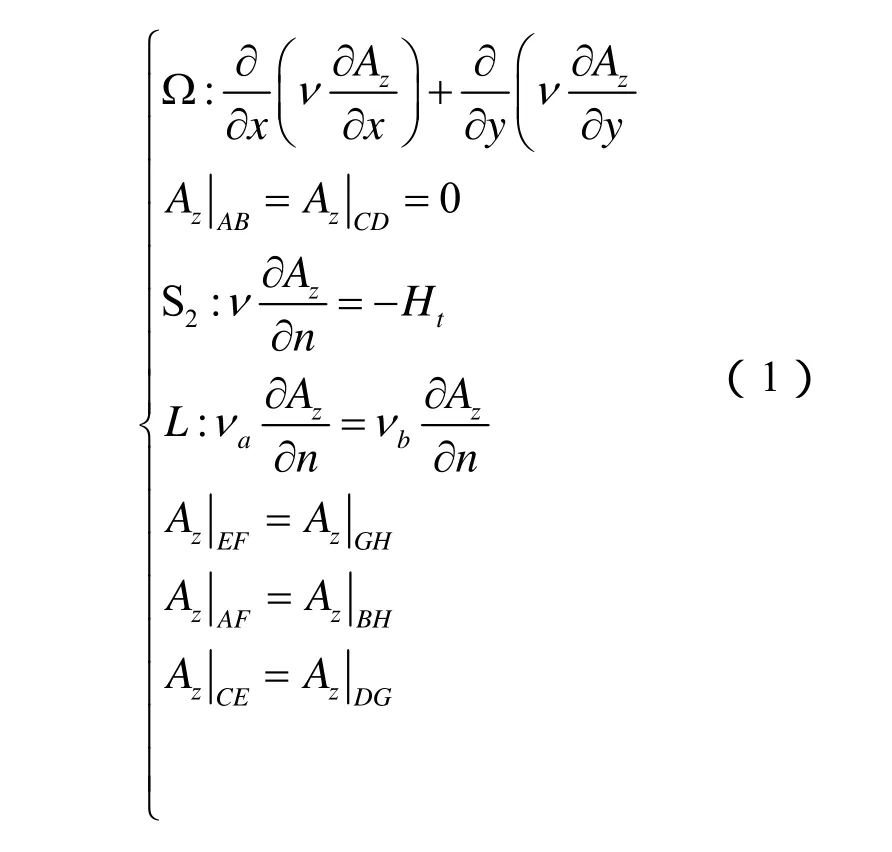
式中:Ω為求解區域,S2為第二類邊界;L為電機內各媒質分界線。
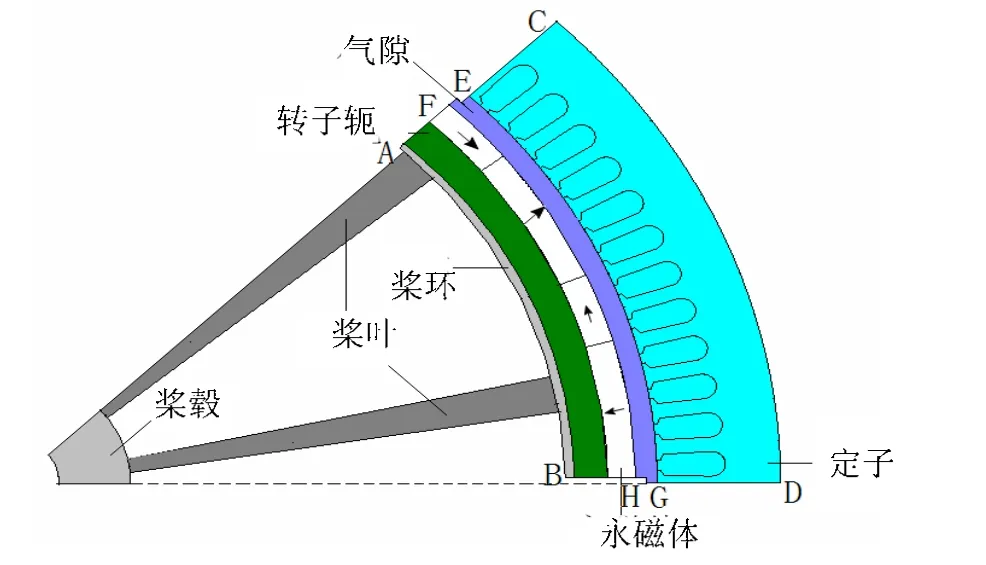
圖2 永磁電機結構示意圖
剖分單元采用了精度較高的曲邊四邊形,它的邊可以不是直線。在單元內任一點的磁位A,可以認為是該單元的四個節點磁位的函數,因此可以構成一個磁位插值函數。對式(1)進行求解,可以得到電機內各節點的矢量磁位值AZ,進而,可獲得電機內各點的磁密和相繞組電勢。
其中電機內各節點的磁密可表示為:

一個電樞繞組線圈邊的一根導體單位長度的平均電勢可表示為:

其中,Ab為槽面積。如果線圈邊劃分為ne個單元(有N1匝),則一個線圈邊的平均電勢為:
其中:參數lef為鐵心有效長度,s為單元面積,i, j ,m,n 為四邊形單元的節點號,各繞組的電勢都是由線圈邊電勢組成的,可得相繞組電勢:
由式(5)可知,相繞組電勢與電樞長度、匝數、及電機磁場有關[5-19]。
在計算過程中,定轉子的相對運動采用運動氣隙邊界法,斜槽采用疊加法[10]加以考慮。
3 電磁計算結果與分析
采用上述方法,對自行設計的22.5 kW機槳一體化水下推進器進行電磁分析與計算。
圖3為永磁機槳一體化推進器的二維模型圖,電機的轉子具有較小的厚度,轉子上的永磁體為Halback陣列形式。為便于觀察和說明,這里沒有畫出較為復雜的密封及安裝示意圖。

圖3 永磁機槳一體化裝置二維模型圖
為節省計算資源和時間,取電機的八分之一的二維模型作為電磁場研究對象。
空載和額定負載時,永磁電機磁場分布如圖4和圖5所示。
圖6為空載氣隙磁密波形圖,從圖中可清晰地看到齒槽效應的結果。圖7為空載反電勢及其基波。
圖8~10為電機在額定負載下,定子電流、電磁轉矩以及轉速的波形圖。
圖4 空載情況下電機磁場分布
圖5 額定負載情況下電機磁場分布
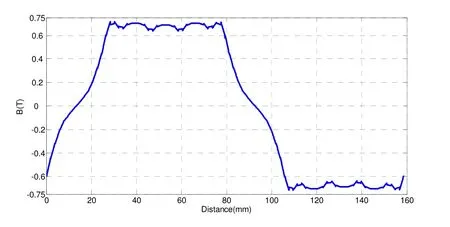
圖6 空載氣隙磁密
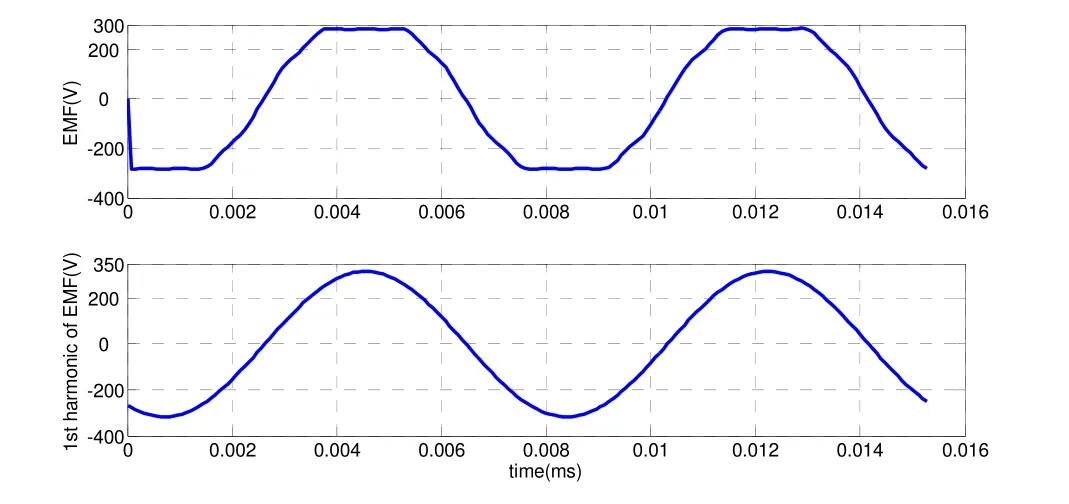
圖7 空載反電勢及其基波
5 結論
本文針對新型IMP式的推進電機特點,設計了一種新型的永磁電機,并采用有限元法對電機電磁場進行數值計算,在計算過程中計及了電機定、轉子相對運動和定子斜槽等因數。通過理論分析和計算得到如下結論:
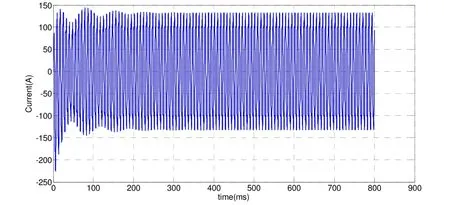
圖8 額定負載時定子電流波形圖
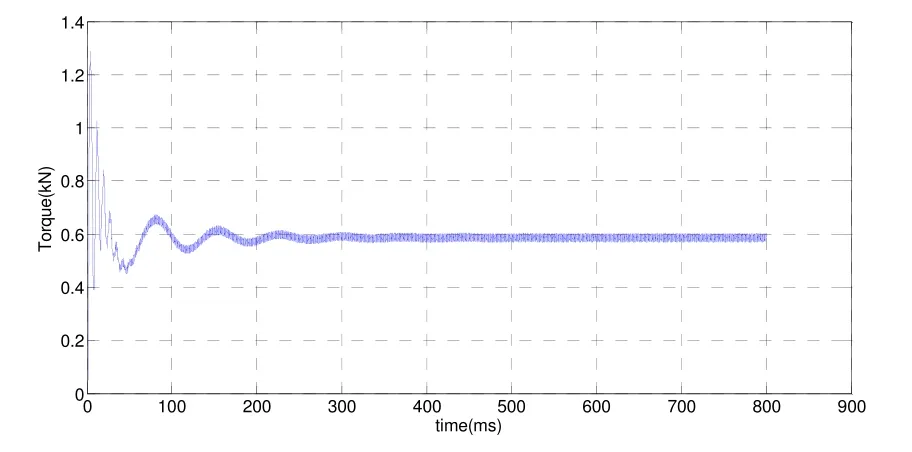
圖9 額定負載時電磁轉矩圖
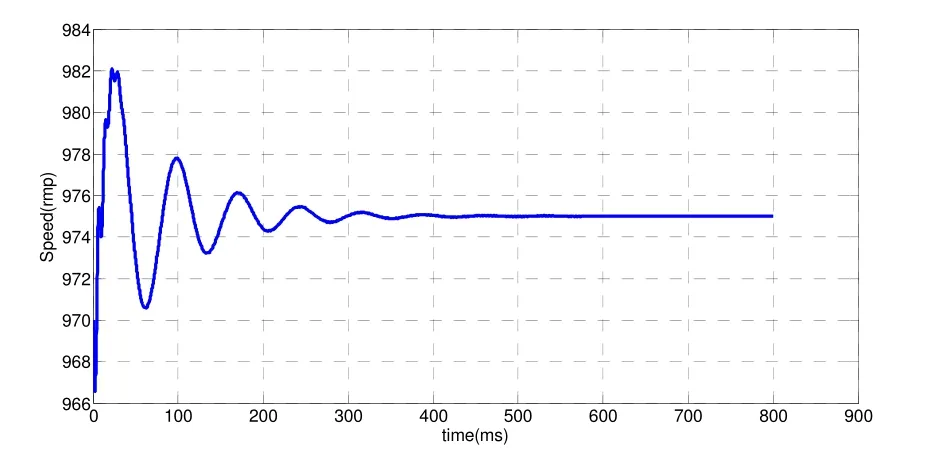
圖10 額定負載時電機起動過程
(1)本文對自行設計的大氣隙、Halbach轉子結構的新型一體化推進電機進行電磁場有限元計算,計算結果滿足工程設計需要,所使用的方法有助于縮短設計和試驗周期,進一步節約成本。
(2)除電磁場外,一體化推進器在水下運行時還涉及到溫度場和流體場,所以如何準確分析一體化推進器中的溫度分布以及建立與之對應的多場耦合研究方法是本文后續工作的重點。
[1]http://www.rollsroyce.com/marine/overview/news/2005/newsiteml 2.htm, 15 Nov (2005).
[2]S. M. Abu Sharkh, S. H. Lai and S. R. Tumock, "A Structurally Integrated Brushless PM Motor for Miniature Propeller Thrusters[J].IEE Proc.-Electro Power Appl, 151 (5), pp. 513-519, (2004).
[3]S. M. Abu Sharkh, "Propulsion for AUVs", in Griffiths, G(Ed.)[C].Technology and Applications of Autonomous underwater vehicles, Taylor and Francis (2003).
[4]Z.P.Xia, Z.Q.Zhu, D.Howe, Analytical magnetic field analysis of Halbach magnetized permanentmagnet machines[J].IEEE transactions on magnetics, Vol.40, No.4, July 2004. p1864-1872.
[5]Z.Q.Zhu, Z.P.Xia, D.Howe, Comparison of Halbach magnetized brushless machines based on discrete magnet segments or a single ring magnet[J].IEEE transactions on magnetics, Vol.38, No.5,Sep 2002, p2997-2999.
[6]Jiabin Wang and David Howe, Tubular modular permanent-magnet machines equipped with Quasi-Halbach magnetized magnets part I:magnetic field distribution, EMF, and thrust force[J].IEEE transactions on magnetics, Vol.41,No.9, Sep.2005, p2470-2478.
[7]T. Sakamoto, H. Wakimoto. Internal stress analysis of Halbach array magnets with application to linear synchronous motors[C]. SPEEDAM 2008 International Symposium on Power Electronics,Electrical Drives, Automation and Motion.
[8]Wakimoto H, Sakamoto T. Magnetic field and internal stress analysis of Halbach array permanent magnet[J]. The papers of Technical Meeting on Linear Drives, IEE Japan LD-06-16, 2006 (in Japanese).
[9]Qiao Mingzhong, , Liang Jinghui ,Cai Wei. Design and Analysis of a Novel IMP PM Motor for Low Noise Pump[C]. 2010 IEEE International conference on Mechatronics and Automation, xi’an,China, August 4-7,2010.
[10]喬鳴忠, 魏建華, 葉紅春. 考慮定子斜槽及轉子運動的外轉子無刷直流電機數值計算[J]. 大電機技術, 2006(2): 38-41.
猜你喜歡
沈陽醫學院學報(2023年6期)2023-12-27 09:51:46
空間科學學報(2021年6期)2021-03-09 06:20:00
石油地球物理勘探(2017年4期)2017-12-18 07:15:09
湖南城市學院學報(自然科學版)(2016年2期)2016-12-01 04:07:07
湖南城市學院學報(自然科學版)(2016年2期)2016-12-01 04:06:37
電測與儀表(2016年11期)2016-04-11 12:20:30
電機與控制應用(2015年1期)2015-03-01 03:49:12
物探化探計算技術(2015年2期)2015-02-28 17:42:46
物探化探計算技術(2015年2期)2015-02-28 17:42:42
河南科技(2014年7期)2014-02-27 14:11:39
