
一種DC-DC變換器的控制策略及仿真分析
2012-07-04 02:45:20徐百匯聞琦史振宇
船電技術 2012年8期
徐百匯 聞琦 史振宇
(1. 海軍東海艦隊裝備部,浙江寧波 315122; 2. 中國人民解放軍92730部隊裝備部,海南三亞572016;3. 海軍駐438廠軍事代表室,武漢430064)
0 引言
PWM 變換器本質上屬于時變的、強非線性系統,其精確模型較難建立,基于線性反饋控制的變換器在動態響應和魯棒性上很難取得滿意的控制效果[1]。近年來,國內外學者將一些非線性控制方法引入 PWM 變換器中,如滑膜控制[2],單周控制[3]等。模糊控制是以模糊集理論、模糊語言變量和模糊邏輯推理為基礎的一種智能控制方法,具有算法簡單、易于軟件實現、魯棒性強和適應性好等特點并且可以很好的解決被控對象參數的不確定問題。此外,模糊控制能夠處理時變、非線性、精確模型難以確立的系統[4,5],已被廣泛地應用于DC-DC變換器中。
PID控制是嚴格基于對象的數字模型,它可確保系統的穩定性、可靠性等。PID控制理論是一種較為成熟的理論。已廣泛用于工業控制和自動化領域。然而,對于非線性系統,PID控制并不太適合。因此.對DC-DC變換器這種強非線性系統,簡單的PID控制越來越難以滿足其不斷提高的性能指標要求。提出了一種混合模糊PID控制。而通過模糊控制對傳統PID控制器進行增益調節:通過對DC/DC變換器建立近似線性小信號模型得到優化的PID參數,以達到閉環控制系統的性能要求。
1 模糊控制原理
模糊控制[6]的概念首先是由加利福尼亞大學著名教授L.A.Zadeh首先提出的。它是以模糊集理論、模糊語言變量和模糊邏輯推理為基礎的一種智能控制方法,他是從行為上模仿人的模糊推理和決策過程的一種智能控制方法。該方法首先將操作人員或專家經驗編成模糊規則,然后將來自傳感器的實時信號模糊化,將模糊化后的信號作為模糊規則的輸入,完成模糊推理,將推理后得到的輸出量加到執行器上。

圖1 模糊控制的基本原理框圖
如圖1所示,它的核心部分為模糊控制器[7],圖中線框部分的控制規律由計算機程序實現。其實現模糊控制算法的過程描述如下:微機經中斷采樣獲取被控制量的精確值,然后將此量與給定值比較得到誤差信號E,一般選誤差信號E作為模糊控制器的一個輸入量,把誤差信號E的精確量進行模糊化變成模糊量。誤差E的模糊量可用相應的模糊語言表示,得到誤差E的模糊語言集合的一個子集是一個模糊矢量),再由和模糊控制規則(模糊算子)根據推理的合成規則進行模糊決策,得到模糊控制量
2 SEPIC變換器的小信號模型及傳遞函數的確定


3 SEPIC變換器模糊自適應 PID控制器參數整定算法研究
3.1 模糊自適應PID控制器參數整定原理
模糊自適應 PID控制就是運用模糊數學的基本理論和方法,把規則的條件、操作用模糊集表示,并把這些模糊控制規則及有關信息作為知識存入計算機知識庫中,然后計算機根據控制系統的實際響應情況,運用模糊推理,既可自動實現對PID參數的最佳調整。在國內外,已經有很多學者將模糊自適應PID控制應用于直流變換器上,無論理論上的分析和研究,還是實踐上的應用與實現,都得到了良好的效果[9-12]。
模糊自適應PID控制器的結構如圖2所示,其中rin為系統輸入,yout為系統輸出,error為系統輸入與輸出的差,ec為誤差的變化率。

圖2 模糊自適應PID控制器的結構
設PID控制器的輸出量為u(t),輸入量為e(t),它們的關系為:

式中:KP為比例增益,KI為積分增益,KD為微分增益。模糊自適應參數整定就是尋求該三個參數與e、ec之間的關系。整個系統在運行中不斷檢測e和ec,然后根據一定的原理對PID的三個參數進行修改,以滿足不同e和ec對控制參數的不同要求,從而使被控對象有良好的性能。
3.2 模糊自適應PID控制器參數整定算法
通過多次操作的經驗總結或多次操作的數據處理,結合理論分析可以歸納出偏差 e、偏差變化率ec跟PID調節器的三個參數KP、KI、KD間,存在如下關系。
基于以上總結出的輸入變量 e與三個參數間的定性關系,結合工程技術人員的分析和實際操作經驗,考慮偏差變化率的影響,建立合適的模糊控制表,就是調節修正PID調節器三個參數的模糊規則。
將系統誤差 e和誤差變化率 ec變化范圍定義模糊集上的論域,

其模糊子集為:

設 e,ec和 KP,KI,KD均服從正態分布,因此可導出各模糊子集的隸屬度,根據各子集的隸屬度賦值表和各參數模糊控制模型,應用模糊合成推理設計PID參數的模糊矩陣表,查出修正參數代入下式計算:

在線運行過程中,控制系統通過對模糊邏輯規則的結果處理、查表和運算,完成對PID參數的在線自校正,其工作流程如圖3所示。
經仿真可得,系統的Bode圖為圖4所示[6,9]。
對于一個穩定的電壓可調系統,其增益裕量應大于6 dB,相角裕量應大于45°[13],而該系統的相角穩定裕量僅為y=2.236°。因此,可以采用PID控制器來提高系統的穩定性,其傳遞函數為:

令 KP=1,KI=0.001,KD=0.03,補償后的相角裕量約為89°,增加了系統的穩定性。
但對DC/DC變換器這種強非線性系統,單一PID調節往往不能滿足系統性能的要求,因此采用模糊自適應PID控制器。下面對模糊自適應PID控制器與單一PID控制器對系統的輸出進行MATLAB仿真比較。
由圖5所示,系統在無任何控制時,輸出時會產生較大的振蕩,應用PID控制可以較好的解決上述問題,但是輸出達到穩態的時間較長。而采用模糊自適應PID控制,可以使系統盡快進入穩定工作狀態,具有良好的工程實踐意義。

圖3 工作流程圖

圖4 系統Bode圖
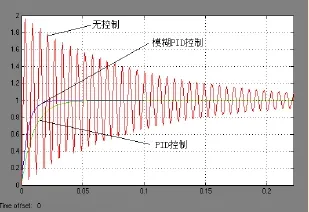
圖5 控制方式不同時,系統啟動的輸出波形
4 結論
針對寬幅壓工況下的輸入電壓擾動以及SEPIC電路自身的強非線性特點,本章嘗試性地將模糊自適應PID控制運用到SEPIC變換器上,經過仿真,得到了理想的效果。該控制策略具有如下特點:
(1)模糊自適應 PID控制以 PID控制為核心,可以對系統的傳遞函數進行補償,有助于降低系統輸出紋波、變換器啟動時的輸出沖擊,優化各元件參數以及提高變換器的穩定性。
(2)模糊自適應 PID控制在 PID控制的基礎上,根據誤差的改變,對PID控制器的三個參數進行實時調節,增強了系統的快速調整性、魯棒性和可靠性,為變換器穩定工作奠定了基礎。
[1]宋受俊, 劉景林, 張智慧. BUCK變換器建模及其先進控制方法仿真[J]. 計算機仿真, 2006, 21(3):294-300.
[2]Venkataramanan R, Sabanovic A, Cuk S. Sliding mode control of DC-to-DC converter[C]. Industrial Electronics Society,Montreal,Que,Canada: IEEE,1985,2: 251-258.
[3]Smedly K M, Slobodan C. One-cycle control of switching converters[J]. IEEE Transation on Power Electron Vonics, 1995, 10(6): 625-633.
[4]張化光, 路文賾. 基于電流模式的Buck變換器的模糊控制[J]. 控制工程, 2009, 16(4): 472-474, 501.
[5]郭唐仕, 尹華杰. Buck變換器的數字模糊PID控制[J]. 電源技術應用, 2002, 5(5): 181-184.
[6]劉金琨. 先進PID控制的MATLAB仿真[M]. 北京:電子工業出版社, 2004.
[7]李友善, 李軍. 模糊控制理論及其在過程控制中的應用[M]. 北京: 國防工業出版社, 1993: 78-85.
[8]黃友銳, 曲立國. PID控制器參數整定與實現[M].北京: 科學出版社, 2010: 22-25.
[9]王寶瑛, 朱方明, 曹秉剛等. 電動汽車用DC/DC變換器模糊自整定PI控制[J]. 電力電子技術, 2007,41(1), 48-50.
[10]任碧瑩, 余健明, 同向前等. 混合式自調整模糊控制在DC/DC變換器中的應用[J]. 電力電子技術,2001, 35(6), 23-25.
[11]Arnaldo M, Miguel S. SEPIC Type DC-DC Converter Fuzzy Model[C]. ICROS -SICE International Joint Conference, Japan: Fukuoka International Congress Center, 2009: 891-895.
[12]許會軍, 王萍. 移相全橋變換器的模糊PID預測控制[J]. 計算機仿真, 2007, 24(1): 246-249.
[13]王萍, 辛愛芹, 鄒宇. 高性能模糊PID控制DC/DC變換器[J]. 電力電子技術, 2007, 41(8): 102-103.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
幸福(2018年33期)2018-12-05 05:22:42
Coco薇(2017年11期)2018-01-03 20:59:57
家庭影院技術(2017年9期)2017-09-26 03:41:45
