基于相關系數法分區影像匹配的研究
2012-09-22 10:29:56周惠慧
城市勘測 2012年6期
周惠慧
(武漢大學遙感信息工程學院,湖北武漢 430079)
1 前言
影像匹配實質上是在兩幅或多幅影像上識別同名點的過程,同名點的確定是以匹配測度為基礎的。目前,影像匹配的算法主要分為基于灰度的匹配和基于特征的匹配。相關系數法是一種基于灰度的匹配[1],它還可作為其他匹配如最小二乘法等算法的初匹配[2]。這種方法基于統計理論,對像點進行灰度檢測,并利用一定的算法進行相似性度量,即計算相關系數。當相關系數最大時,就認為是同名像點。采用核線影像作為數據源時,這種方法計算量更小,簡單易行,且其匹配精度可達到一個像素。但是,相關系數法影像匹配常采用整體影像匹配方式,匹配精度容易受到兩幅(或多幅)影像灰度及紋理不一致的影響,筆者在試驗的基礎上,采用分區影像匹配的方式,提高了相關系數法影像匹配的精度。
2 相關系數法的原理
相關系數是標準化的協方差函數,協方差函數除以兩信號的方差即得相關系數。相關系數法就是以相關系數為匹配測度,判斷左右影像中一定大小窗口中像素的相似性,若相關系數符合一定的判斷條件,則窗口內的中心像素被提取為一對同名點[3]。若左影像的灰度函數為g(x,y),目標窗口中心像素坐標為(i,j),右影像灰度函數為g'(x,y),搜索窗口中心像素為(i+r,j+c),則兩窗口間相關系數的值為:
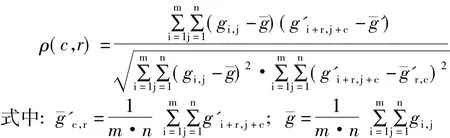
考慮到計算量,相關系數的實用公式為:

當選取窗口的相關系數最大且大于設定的閾值,則搜索區窗口的中心像素為求得的同名點。對于一維相關,r≡0。
相關系數是灰度線性變換的不變量,因此,采用相關系數法可以克服影像線性畸變的影響。
3 算法的設計與實現
在核線影像上,只需進行一維搜索。只需在目標點所在核線的同名核線上逐像素計算。但是,若目標區太長,灰度信號的重心與幾何重心并不重合,且影像存在幾何變形,就會產生相關誤差。因此一維相關目標區的選取實際上與二維相同,一般情況下,搜索區為右像核線及其上下一到兩行像素的灰度陣列。
本試驗先在像對中分別利用Moravec算子提取一定數量特征點,然后逐對計算位于同名核線上特征點的相關系數。具體實現時,目標區和搜索區的每個窗口平均灰度只需計算一次[4]。這兩項措施可以減少計算量,提高運行速度。
4 結果分析
為了說明問題,對左右影像的灰度和紋理差進行了調整,使右片的灰度質量和紋理清晰度明顯低于左片,利用Moravec算子提取出左右影像的特征點(紅色為特征點,以下同),可見右片的特征點明顯少于左片,但數量還是較多,如圖1所示。
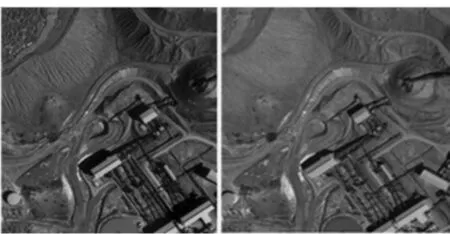
圖1 不同灰度影像Moravec算子特征提取結果
再采用相關系數法對左右影像進行灰度匹配,如圖2所示。
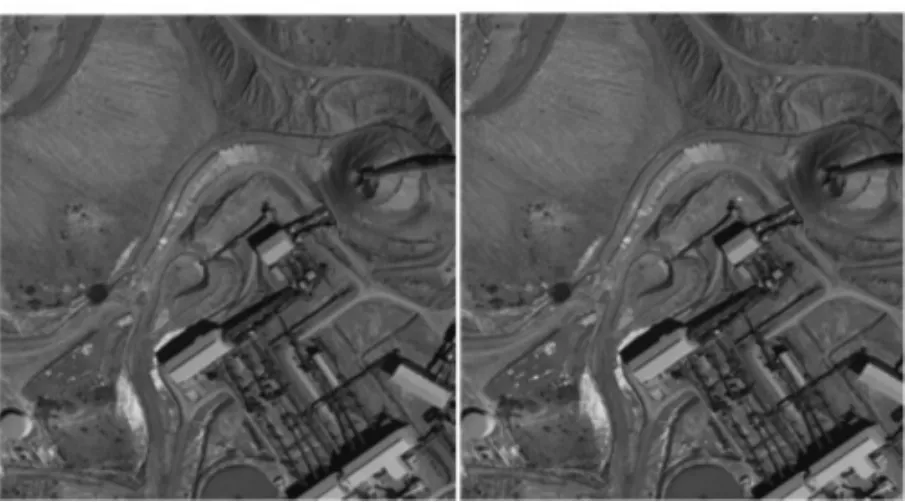
圖2 相關系數法影像匹配同名點分布對比圖
從圖1的左右像片來看,左片的反差較大,紋理信息更為豐富,右片的特征點應包含在左片的特征點之內,理論上來說,采用相關系數影像匹配提取的同名點數量與分布應該與右片的特征點基本一致。圖2中左片為圖1中的右片,作為參照影像,右片為采用相關系數法對圖1中左右影像進行灰度匹配提取的同名點影像。由圖2可以看出,右像中大量特征點沒有滿足與參照影像對應同名點相匹配的要求,最終滿足要求成為匹配點的點比參照影像本來的特征點數量要少得多。比如,參照影像中房屋集中區域提取出了比較多的特征點,但右像中得到的匹配點卻很少,道路沿線及山坡紋理信息豐富的一些特征明顯的地區也沒有滿足要求的點。經分析有如下原因:
(1)算法的結果與相關系數的閾值選擇有關[5],右像亮度較大,地物起伏不明顯區域內像素的相關系數的值整體偏低。而閾值越高,則所得同名點越少,正確率也越高。但若降低閾值,則只在局部范圍內同名點的數量有增加,難以做到整幅影像均勻分布;
(2)由于左右影像存在一定的幾何畸變和輻射畸變,對應特征點也存在一定的灰度誤差,而本算法采用一維搜索,甚至可能同名特征點并沒有落在搜索區中;
(3)突起的樹木及遮擋等都會影響影像匹配。一個好的特征點如果沒有匹配點,可能提示被遮擋或存在斷裂,或是附近有突出物干擾[6]。
(4)目標區和搜索區的大小對結果有一定影響。若目標區小,搜索區大,會出現很大的粗差。為了獲得較高的精度,應選擇小的目標區與搜索區[7]。
(5)特征點分布較密集的區域,一些同名點受到相關系數更大的同名點的抑制,沒有被提取出來。
5 分區影像匹配策略
相關系數法影像匹配一般采用整體匹配的方式,由于匹配的精度與影像紋理有關,紋理越豐富則匹配精度越高,筆者認為采用分區影像匹配可大大改善灰度匹配結果。以本數據為例,在兩幅影像特征都明顯,紋理信息豐富且灰度及反差相差不大的區域(如房角)設定較高的閾值,在亮度、反差及紋理相差較大的區域(如左上角山坡)設定較低的閾值,在紋理信息都不豐富的區域可以考慮不提取同名點;在相對變形大的區域定義較大的搜索窗口,在相對變形小的區域定義較小的搜索窗口。區域由目視判別之后進行人工劃分,也可由算子提取邊緣進行影像分割。這樣,由于是基于特征點的相關系數法,既考慮了灰度特征也考慮了幾何特征,可以使整個影像范圍內同名點分布均勻且控制精度不受太大影響。
將影像劃分為如圖3所示的四大區域。以右上區域為原默認設置,搜索窗口大小為5×5,相關系數的閾值為0.5;右下區域搜索窗口大小變為7×7,閾值變為0.8;左下區域搜索窗口大小變為5×5,閾值變為0.65;左上區域搜索窗口大小變為3×3,閾值變為0.3。若有左右影像同名地物被劃分在不同區域,則為默認設置,由于這樣的區域較少,因此對整體匹配的影響忽略不計。分區影像匹配的結果如圖4。圖中右片的同名點數量遠遠多于圖2中右片的同名點數量,同名點分布也更均勻。

圖3 影像分區
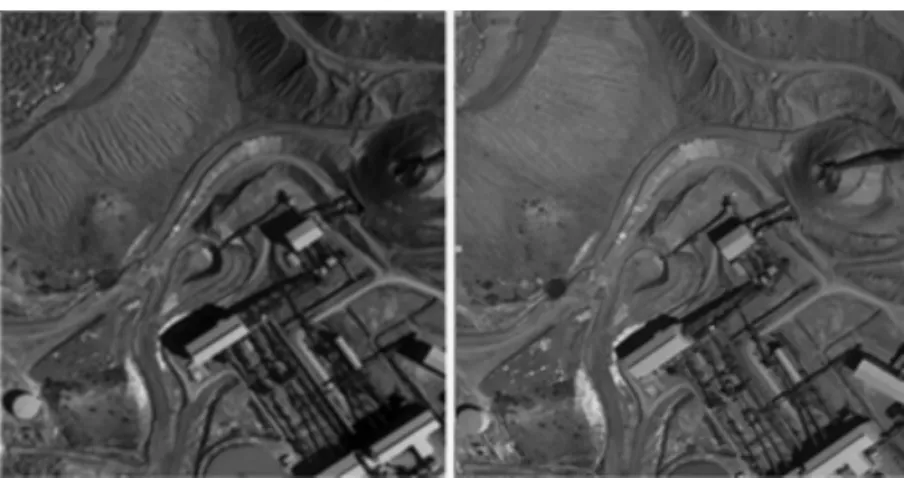
圖4 分區影像匹配的同名點提取結果
6 結論
影像匹配是計算機視覺及數字攝影測量的核心問題。相關系數法作為一種基礎算法,得到了廣泛的應用。但由于影像和算法本身的原因,使其實用性受到一定制約。本文就其原理、算法本身、結果等進行了分析,提出了一種改進的方法——分區域設定閾值與搜索窗口大小。由圖4我們看出,改進后的結果將比原結果信息更加豐富,分布更加均勻,同時準確性不會受到很大的影響,可以為影像匹配的最小二乘法提供更加理想的初始值。
[1]張劍清,潘勵,王樹根.攝影測量學[M].武漢:武漢大學出版社,2009.
[2]耿則勛,張保明,范大昭.數字攝影測量學[M].北京:測繪出版社,2010.
[3]寇蓉.相關系數與最小二乘影像匹配算法的研究[J].內蒙古科技與經濟,2010,17.
[4]劉瑩,曹劍中,許朝暉等.基于灰度相關的圖像匹配算法的改進[J].應用光學,2007.28(5)
[5]吉大純,李學軍,侯金寶.影像匹配中的若干基本問題研究[J].計算機技術與發展,2010,20(5).
[6]江萬壽,鄭順義,張祖勛等.航空影像特征匹配研究[J].武漢大學學報·信息科學版,2003,28(5).
[7]張祖勛.數字相關及其精度評定[J].測繪學報,1984,13(1).
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
