基于Matlab/Simulink的航空發(fā)動機(jī)部件級建模與分析
2012-09-28 09:39:38王繼強(qiáng)商國軍
航空發(fā)動機(jī) 2012年4期
關(guān)鍵詞:發(fā)動機(jī)模型
夏 超,王繼強(qiáng),商國軍,周 淼
(南京航空航天大學(xué)能源與動力學(xué)院,南京 210016)
0 引言
在航空發(fā)動機(jī)部件級建模中,非線性微分方程組和平衡方程的求解多采用迭代計算,但是在計算動態(tài)模型時,動態(tài)因素的存在使得迭代次數(shù)大大增加,模型實時性和全包線內(nèi)的收斂均很難得到保證[1]。
為了解決部件級建模中解非線性方程組時的迭代問題,引入容積動力效應(yīng),在Matlab/Simulink中搭建航空發(fā)動機(jī)的無迭代動態(tài)模型,最后與GSP軟件仿真的結(jié)果進(jìn)行比較,驗證了該模型有效且準(zhǔn)確。
1 基于Matlab/Simulink的渦扇發(fā)動機(jī)數(shù)學(xué)模型
1個完整的渦扇發(fā)動機(jī)模型包括進(jìn)氣道、風(fēng)扇、外涵道、壓氣機(jī)、燃燒室、高壓渦輪、低壓渦輪、混合室、噴管以及大氣環(huán)境等大模塊,并形成各自獨立的子模塊。各模塊之間通過氣流的流向及匹配關(guān)系連接。所搭建的完整發(fā)動機(jī)Simulink方框圖如圖1所示,作為比較的發(fā)動機(jī)GSP自帶的某模型方框圖如圖2所示。
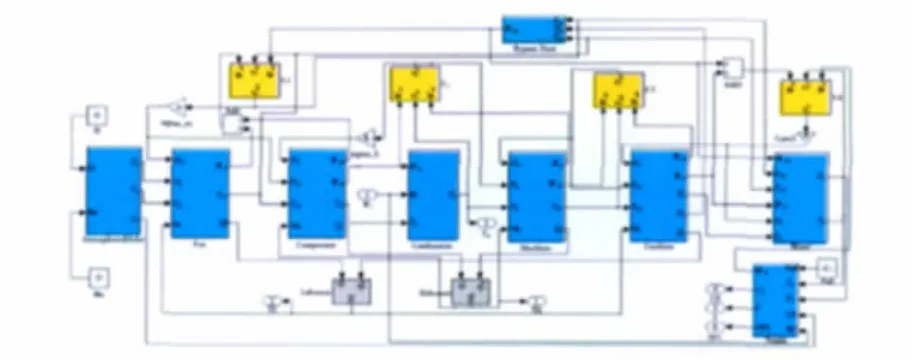
圖1 完整的發(fā)動機(jī)Simulink方框圖
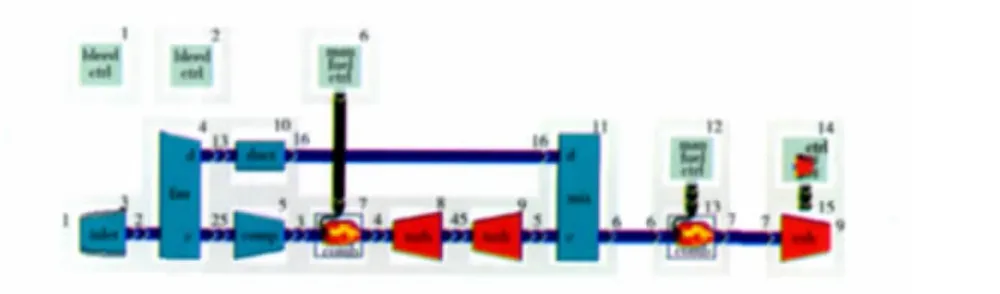
圖2 發(fā)動機(jī)GSP方框圖
2 發(fā)動機(jī)的動態(tài)仿真
對于航空發(fā)動機(jī)來說,動態(tài)仿真指發(fā)動機(jī)加、減速等動態(tài)過程。一般在發(fā)動機(jī)動態(tài)仿真中,忽略容積動力學(xué)效應(yīng)和熱慣性,假定在動態(tài)過程中滿足流量準(zhǔn)平衡,由于模型在運行中要反復(fù)運行雅可比矩陣,計算量巨大難以達(dá)到實時性。本文采用考慮容積動力效應(yīng)的無迭代方法,即在動態(tài)仿真中引入容積效應(yīng),認(rèn)為動態(tài)時流量不再平衡,壓力隨流量變化而變化[2]。
進(jìn)行動態(tài)仿真時,采用GSP軟件中1個模型的數(shù)據(jù),利用本文建立的發(fā)動機(jī)模型進(jìn)行仿真,最后與GSP軟件仿真的結(jié)果進(jìn)行比較,以驗證該模型的準(zhǔn)確性。
2.1 考慮容積動力效應(yīng)的無迭代方法
考慮容積動力效應(yīng)的渦扇發(fā)動機(jī)方框圖如圖3所示。
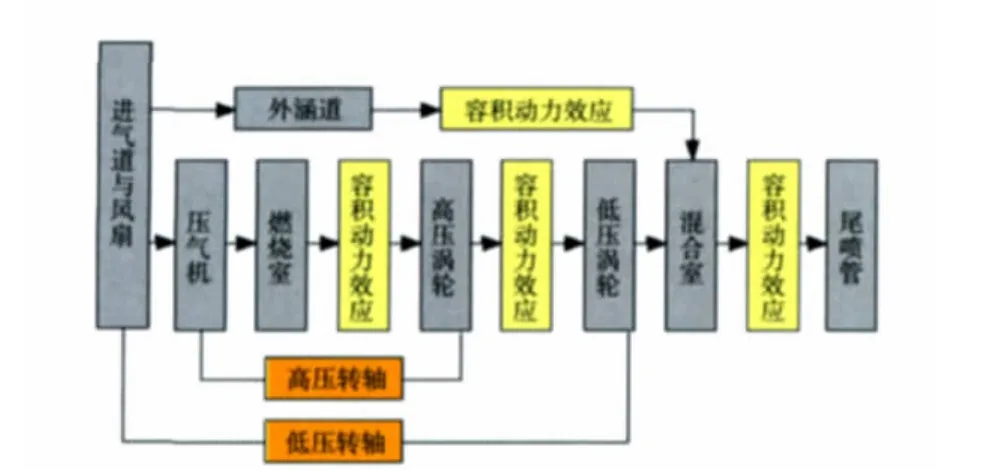
圖3 考慮容積動力效應(yīng)的渦扇發(fā)動機(jī)方框圖
在動態(tài)過程中,由于容腔內(nèi)氣體質(zhì)量與能量的積聚和釋放而引起壓力變化,氣流的進(jìn)、出口參數(shù)不再相等,且滿足一定的動力學(xué)方程。該動力學(xué)方程包括質(zhì)量與能量方程,其中質(zhì)量方程占主導(dǎo),本文為了簡化計算,僅考慮質(zhì)量方程[3]。
假設(shè) 1 股總溫、總壓、流量分別為 Ti、Pi、Wai的氣流流入容腔,以 To、Po、Wao流出,對于單輸入、單輸出的容腔僅考慮質(zhì)量方程可描述為

式中:R為氣體常數(shù);V為容腔體積[4]。
由于渦扇發(fā)動機(jī)流路計算選用了4個壓比(分別為πf、πc、πt,h、πt,l),故選用外涵道容腔(I)、燃燒室容腔(II)、高低壓渦輪之間的容腔(III)和混合室容腔(IV)4個容腔分別求取對應(yīng)的壓比。描述4個容腔的容積動力學(xué)方程為
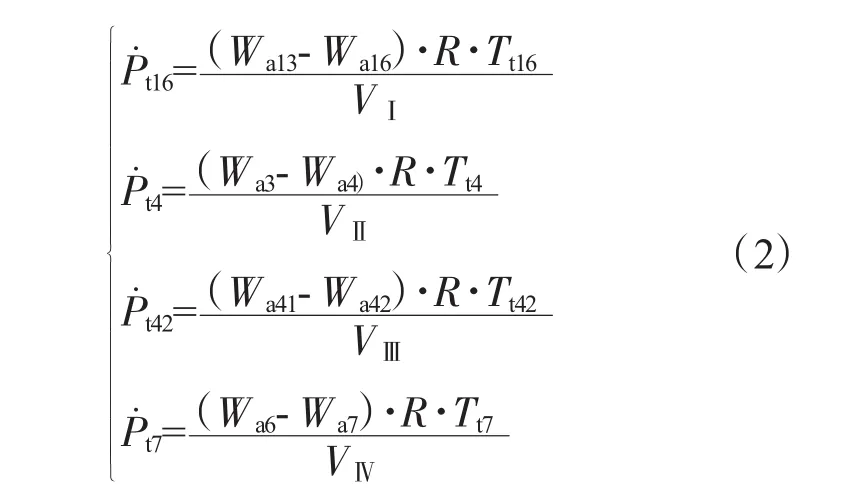
給定初始條件便可以積分求解 Pt16、Pt4、Pt42、Pt7。已知Pt16可以求得 Pt13、Pt21、Pt22,Pt21=Pt22=Pt13=Pt16/σbp;已知 Pt4可以求得 Pt3,Pt3=Pt4/σb;已知 Pt42可以求得 Pt41,Pt41=Pt42;Pt3,Pt3=Pt4/σb; 已 知 Pt7可 以 求 得 Pt55,Pt55=(Pt7Wa7/σm-Pt16Wa16)/Wa55。則 4 個壓比分別為

另外,再考慮2個轉(zhuǎn)子動力學(xué)方程

式中:Qt,h、Qt,l分別為高、低壓渦輪輸出功率;ηh、ηl分別為高、低壓轉(zhuǎn)軸的機(jī)械效率;Jh、Jl分別為高低壓轉(zhuǎn)軸轉(zhuǎn)動慣量;Qc、Qf分別為壓氣機(jī)和風(fēng)扇消耗的功率。已知 Nl、Nh、πf、πc、πt,h、πt,l就可以進(jìn)行各流路的計算,隨時間推移便可完成動態(tài)仿真[5]。
2.2 動態(tài)數(shù)學(xué)模型和仿真設(shè)置
為了實現(xiàn)動態(tài)仿真,引入容積動力學(xué)模塊和轉(zhuǎn)子動力學(xué)模塊。其中通過容積動力學(xué)模塊可以計算得到Pt16、Pt4、Pt42、Pt7,從而得到 πf、πc、πt,h、πt,l;而通過轉(zhuǎn)子動力學(xué)模塊可以計算得到Nl、Nh。這樣就可以建立動態(tài)模型進(jìn)行動態(tài)仿真。
在simulink仿真前設(shè)置好參數(shù)和輸入、輸出方式:(1)設(shè)置仿真起始時間和終結(jié)時間分別為0和10;(2)設(shè)置算法仿真,選擇變步長龍格-庫塔連續(xù)算法,最小、最大步長和初始步長及誤差容限為默認(rèn);(3)輸入和輸出設(shè)置,選擇從工作區(qū)導(dǎo)入(load from workspace),并將數(shù)據(jù)保存至工作區(qū)(save to workspace),限制輸出數(shù)據(jù)量為10000,其他參數(shù)為默認(rèn)[6]。
2.3 動態(tài)仿真
選擇相對成熟的GSP軟件中的1個模型作為參照,來驗證本文模型的準(zhǔn)確性。先設(shè)置動態(tài)仿真時的初始穩(wěn)態(tài)點和燃油變化量,在地面進(jìn)行發(fā)動機(jī)加、減速仿真。選擇典型的參數(shù),如高、低壓轉(zhuǎn)速Nh、Nl和渦輪前溫度Tt4、發(fā)動機(jī)推力F作為比較量,進(jìn)行動態(tài)仿真,仿真結(jié)果如圖4所示。
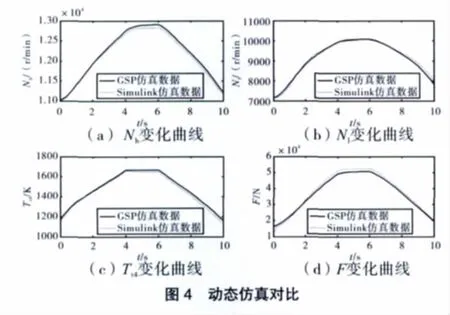
從圖4中可見,本文建立的發(fā)動機(jī)動態(tài)模型Simulink仿真的結(jié)果與GSP仿真的結(jié)果相近,除推力初始的個別數(shù)據(jù)誤差大于5%,其余數(shù)據(jù)的實際相對誤差均小于5%(如圖5所示)。
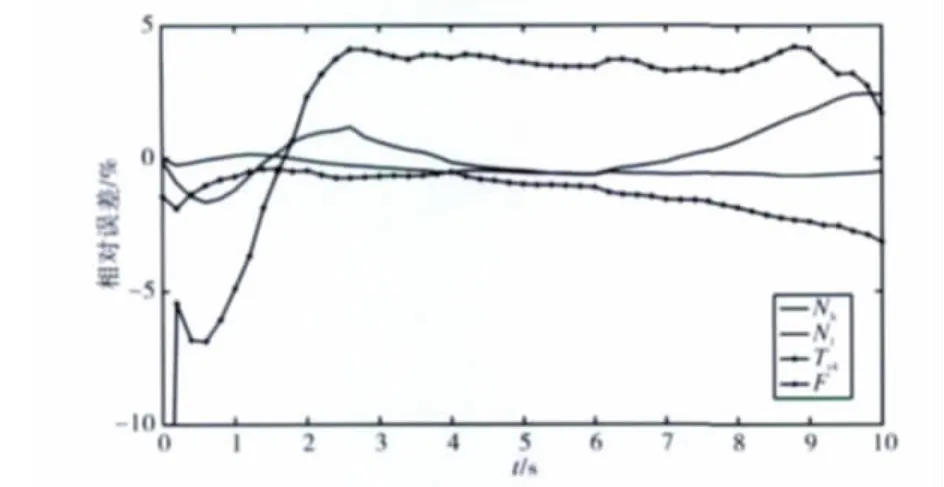
圖5 相對誤差分析
3 發(fā)動機(jī)穩(wěn)態(tài)仿真
發(fā)動機(jī)穩(wěn)態(tài)仿真是指發(fā)動機(jī)處于穩(wěn)定工作狀態(tài),對各特征截面的物理參數(shù)求解。常規(guī)方法是使用Newton-Raphson方法對共同工作方程組進(jìn)行求解,此方法需反復(fù)運行雅可比矩陣,不僅運算量大,求解速度慢,而且對初值敏感,計算易發(fā)散[7]。本文對發(fā)動機(jī)穩(wěn)態(tài)仿真創(chuàng)新地采用基于發(fā)動機(jī)的動態(tài)仿真模型,以避免反復(fù)迭代過程,通過與GSP軟件穩(wěn)態(tài)仿真的結(jié)果對比,來驗證本方法的可行性和該模型的精度。
3.1 穩(wěn)態(tài)共同工作方程
上文中引入了4個容積動力學(xué)方程和2個轉(zhuǎn)子動力學(xué)方程,由于供油量隨時間的變化,不斷有變化的積分值輸出。而在發(fā)動機(jī)穩(wěn)態(tài)共同工作時,供油量為常值,流量滿足平衡,高、低壓轉(zhuǎn)子功率平衡,此時4個容積動力學(xué)模塊和2個轉(zhuǎn)子動力學(xué)模塊應(yīng)滿足

其中:Wa13=Wa21-Wa22,Wa4=Wa3+Wf≈Wa3(燃油量相對于Wa3可以忽略),Wa6=Wa5+Wa16,這樣就滿足了6個平衡方程,6 個未知數(shù) Nl、Nh、πf、πc、πt,h、πt,l就可以求得。在穩(wěn)態(tài)仿真開始時,4個容積動力學(xué)模塊和2個轉(zhuǎn)子動力學(xué)模塊還不滿足平衡條件,但隨著時間的推移,逐漸趨于平衡。其平衡時的數(shù)值即為穩(wěn)定工作時的數(shù)值。
3.2 穩(wěn)態(tài)仿真
在地面進(jìn)行發(fā)動機(jī)穩(wěn)態(tài)仿真,仿真結(jié)果如圖6所示。
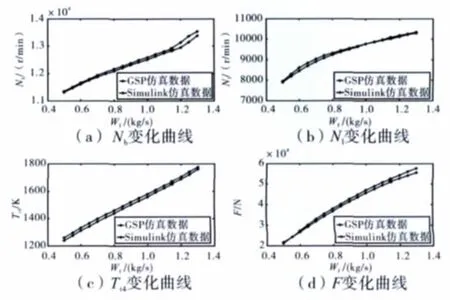
圖6 穩(wěn)態(tài)仿真對比
本文建立的發(fā)動機(jī)穩(wěn)態(tài)模型基于其動態(tài)模型,同樣取決于部件特性的準(zhǔn)確度和部件數(shù)學(xué)模型的準(zhǔn)確度。由圖5可知,其Simulink仿真的結(jié)果與GSP仿真的結(jié)果相近,實際相對誤差小于4%(如圖7所示)。
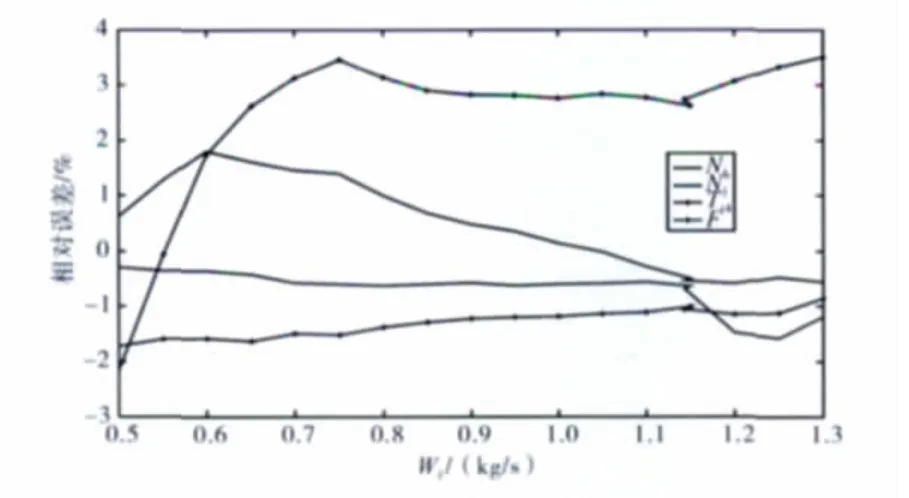
圖7 相對誤差分析
4 結(jié)論
(1)通過引入容積動力效應(yīng),避免了反復(fù)迭代;在simulink中搭建了渦扇發(fā)動機(jī)的部件級模型,由已封裝的模型構(gòu)成了渦扇發(fā)動機(jī)專業(yè)模型庫,具有一定的通用性和擴(kuò)展性。
(2)對發(fā)動機(jī)進(jìn)行了動態(tài)和穩(wěn)態(tài)仿真,并與GSP仿真的結(jié)果進(jìn)行對比,可知該模型誤差較小,精度較高,具有良好的實時性,在航空發(fā)動機(jī)建模方法研究中具有一定參考價值。
[1]劉長福,鄧明.航空發(fā)動機(jī)結(jié)構(gòu)分析[M].西安:西北工業(yè)大學(xué)出版社,2006:18-29.
[2]韓曉光,曲文浩,董瑜,等.基于Simulink的燃?xì)廨啓C(jī)動態(tài)仿真模型[J].航空發(fā)動機(jī),2010,36(3):20-25.
[3]Reed J A,Afieh A A.Computational simulation of gas turbines Part I-foundations of component-based models[J].Journal of Engineering for Gas Turbines Power,2000,122(3):366-377.
[4]Evans A L,Follen G,Naiman C,et al.Numerical propulsion system simulation’s national cycle program[R].AIAA-98-3113.
[5]夏飛.基于MATLAB/SIMULINK的航空發(fā)動機(jī)建模與仿真研究[D].南京:南京航空航天大學(xué),2007.
[6]張志涌,楊祖櫻.MATLAB R2010a教程[M].北京:北京航空航天大學(xué)出版社,2010:252-266.
[7]季春生.航空發(fā)動機(jī)全數(shù)字仿真平臺設(shè)計[D].西安:西北工業(yè)大學(xué),2007.
[8]李家瑞.航空發(fā)動機(jī)建模技術(shù)研究[D].南京:南京航空航天大學(xué),2005.
[9]樊思齊,李華聰.航空發(fā)動機(jī)控制:下冊[M].西安:西北工業(yè)大學(xué)出版社,2008:50-157.
[10]黃家驊,馮國泰.航空發(fā)動機(jī)特性仿真技術(shù)的進(jìn)展與展望[J].推進(jìn)技術(shù),2002,23(4):346-351.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:30
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:18
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年2期)2014-02-27 12:10:15
汽車與新動力(2013年5期)2013-03-11 16:08:17