剪式可展機構非線性動力學分析子系統方法
2013-02-13 06:35:14劉樹青王興松
振動與沖擊 2013年7期
劉樹青,王興松
(1.東南大學 機械工程學院,南京 211189;2.南京工程學院 先進制造技術工程中心,南京 211167)
剪式機構作為可展機構應用廣泛,其基本組成單元為由兩個連桿與轉動銷軸連接的“X”型結構,稱為剪式單元。由多個剪式單元相互串接可構成平面多級剪式伸縮機構,將其合理搭接,可形成豐富實用的立體剪式單元。在建筑、工程機械、機器人、空間結構等領域廣泛應用。隨著航天技術的發展,可展機構成為航天領域研究熱點,而剪式機構作為應用最廣的可展機構形式,對其拓撲結構、可展開性、運動學、結構動力學等方面的相關研究較受重視[1-4],而對其機構動力學研究相對較少。
對剪式可展機構,若直接建立動力學模型則會導致方程規模大,求解困難,較難實時仿真與控制。剪式可展機構由剪式單元組合而成,模塊化程度高,甚至各剪式單元結構相同或相似。因此,將該機構劃分為簡單子系統建立運動方程,并利用子系統間的拓撲結構,建立整體系統非線性動力學模型,實現程式化建模,可有效縮減求解規模,對此,文獻[5-8]均有研究。
本文針對由相互耦合子系統構成的復雜多體系統剪式可展機構提出高效計算子系統方法。該方法將復雜多體系統劃分為簡單子系統,分別建立各子系統運動方程,并通過子系統間的遞推關系建立整系統運動方程,將求解整體系統大規模運動方程轉化為求解子系統小規模運動方程,與傳統方法相比,計算效率更高。
1 狀態空間子系統運動方程
將剪式單元視為子系統,則多數剪式可展機構在拓撲結構上包含相同子系統,如圖1所示。因此,子系統模型便可多次重復使用。剪式可展機構中子系統個數發生變化或設計過程中需更改子系統結構時,均可對動力學模型進行修改,建模過程易于程式化。
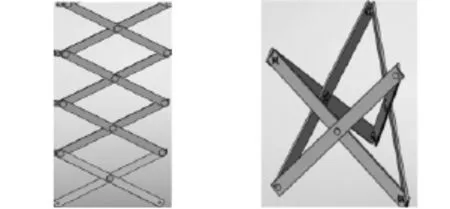
圖1 剪式機構Fig.1 Scissor-like mechanism
1.1 坐標系及各參數遞推表示
多體系統中相鄰兩連接體及相關坐標系如圖2所示,其中i為j的內接體。O-XYZ為慣性坐標系,O'i-X'iY'iZ'i為連接體i體坐標系,位于連接體i的內接關節處,其原點在慣性系中的位置向量為ri,相對慣性系方向矩陣為Ai;O″ij-X″iY″iZ″i位于連接體i的外接關節處,其相對于體坐標系O'i-X'iY'iZ'i的方向矩陣為Cij,O'i與O″ij之間的位置向量為sij;同理可定義連接體j的相關坐標系,O″ij與O'i之間的位置向量為dij。
坐標系建立后,連接體j的位置、速度、加速度均可用其內接體i的相關參數遞推表示[5]:

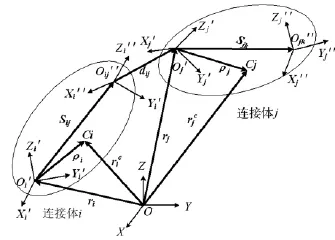
圖2 相鄰兩連接體坐標系Fig.2 Coordinate system of adjacent body
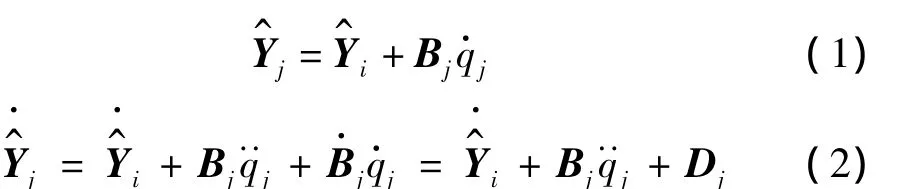
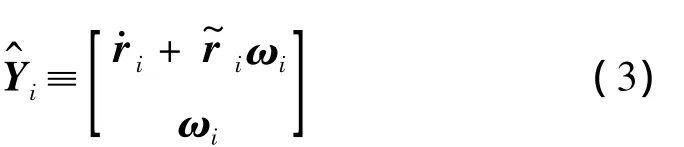
為連接體i的加速度狀態向量;為連接體j和i之間的速度轉移矩陣;qj為關節j的關節相對坐標,ωi為關節i的角速度向量,Hj為關節j的軸線方向向量。
1.2 子系統運動方程
將式(3)中狀態速度用虛位移代替,得虛位移狀態變分:

多剛體系統變分形式的牛頓-歐拉方程為[9]:

對開環子系統,根據子系統拓撲結構,將式(2)、式(4)的遞推關系依次代入式(5),可得開環子系統運動方程為:
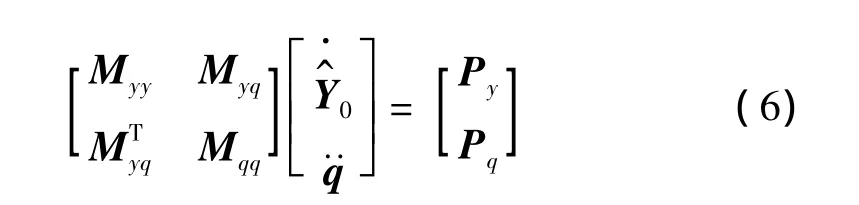
若已知子系統基體加速度,則有:

對閉環子系統,切斷連接體n和n'之間的關節,使之成為兩個開鏈,并引入切斷關節處的約束力及約束方程,得系統運動方程為:
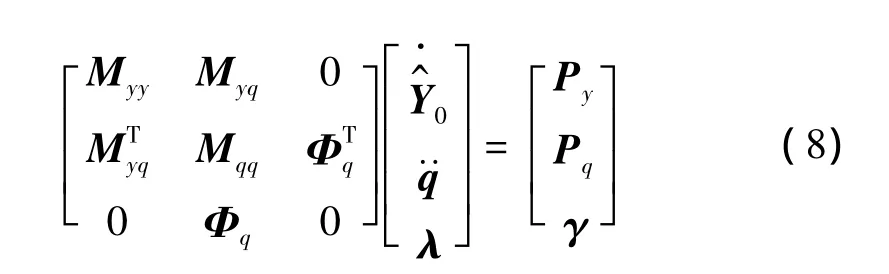
其中:λ為拉氏乘子,Φq為約束雅各比矩陣。

若已知子系統基體加速度,據式(9)可計算出拉氏乘子及各連接體加速度為:

2 子系統方法
據系統拓撲結構,綜合子系統運動方程及約束方程,可建立整個多體系統運動方程,該方程數目多,求解規模大,且在產品設計階段,如果系統中增加或減少一個子系統,或系統結構發生變化,則需對系統模型做復雜的修正。因此,需一種算法,能使各子系統獨立建模計算,且能方便、高效評價對整體系統影響。
2.1 子系統等效
為每個獨立子系統增加一個虛物體,子系統通過該虛物體與基體或其他子系統相連,如圖3所示。
圖3 子系統及虛物體Fig.3 subsystem and virtual body
虛物體無慣量、重力等動力學性質,只用于建立參考系便于描述子系統相對運動。若虛物體運動已知,則其對應的子系統的動力學分析可獨立進行。在整體系統動力學分析中,須計算每個子系統的動力學影響。
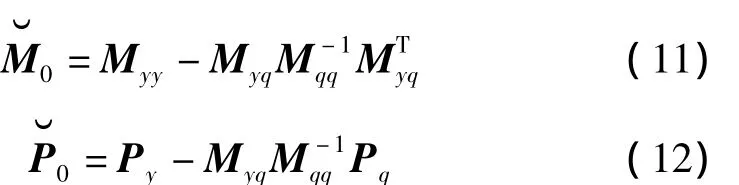
將式(7)代入式(6)得開環子系統對其基體的等效質量矩陣及等效力向量分別為:
將式(9)、(10)代入式(8)得閉環子系統對基體的等效質量矩陣及等效力向量為:
2.2 整體系統運動方程
對圖4由相互耦合的開環或閉環子系統構成的復雜多體系統,可將其劃分為圖5所示幾個子系統。每個子系統通過虛物體與內接子系統相連。
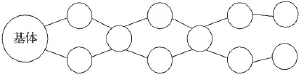
圖4 子系統間相互耦合的多體系統Fig.4 Multibody system with intercoupled subsystems
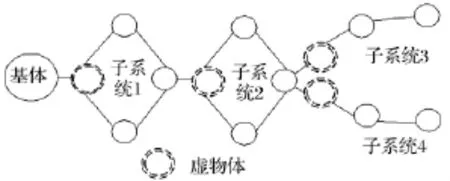
圖5 子系統劃分及等效Fig.5 Subsystem division and the effective model
由求解閉環約束方程得到的子系統位置與速度,可求得子系統內所有物體與關節的位置及速度。子系統虛物體與其內接子系統的連接體運動相同,因此,位置與速度分析可沿正向從第一個子系統向末端子系統遞推。
完成位置和速度分析后,運用式(11)、(12)或式(13)、(14)從末端子系統向內部子系統反向遞推,計算每個子系統的等效質量矩陣及等效力向量。在此過程中,外部子系統的等效質量矩陣及等效力向量與相鄰內部子系統的連接體質量矩陣及力向量相加。最終得到整條路徑等效到基體的質量矩陣及力向量。系統運動方程可表示為:

式(15)中,無論子系統自由度多大、有幾個子系統相互串接,矩陣維數始終為6×6,向量維數為6×1,大大降低了整體系統的求解規模,提高了計算效率,而編程中也便于增加或刪除某個子系統對整體系統的影響,若子系統內部結構發生變化,修改程序也只限于相應的子系統內部。
與傳統微分代數方程動力學模型計算效率比較見圖6,圖中,橫坐標為多體系統自由度數(DOF),縱坐標為兩種方法的建模及求解時間,該時間Intel i5 2450 M CPU,2.5 GHz,4 GB RAM 計算機的 Mathematica 軟件所得。當系統自由度數小于25時,子系統遞推方法的計算效率低于傳統微分代數模型;隨著系統自由度數目的增加,子系統遞推方法的計算效率明顯提高,自由度數越多,效率越明顯。
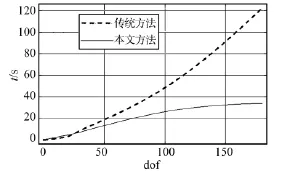
圖6 計算效率對比Fig.6 Comparison of computational efficiency
3 剪式可展機構非線性動力學計算
運用上述子系統方法對圖7三級平面剪式機構進行多體動力學建模,并在Mathematica環境下編程仿真。
本文剪式機構主要參數為:桿件矩形截面寬b=5 mm,高h=30 mm,干架長度l=1 000 mm,材料密度ρ=2 750 kg/m3,彈性模量E=70 ×109N/m2,初始角度θ1=30°。
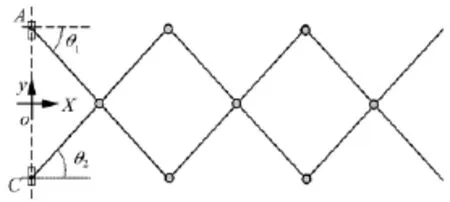
圖7 三級剪式機構簡圖Fig.7 Diagram of 3-level scissor-like mechanism
外力為施加于A、C兩點的驅動力:

三級剪式機構由三個相同剪式單元串聯,傳統建模方法建立的動力學模型為36×36維,本文將每個剪式單元作為一個子系統建立動力學模型,得到其等效質量矩陣及等效力向量,從末端依次向根部遞推,則可得整個系統6×6維的等效質量矩陣及等效力向量,從而降低求解規模。各節點位置、速度、加速度可通過從根部向末端的正向遞推求得。
為驗證子系統方法的正確性,建立三級剪式機構拉格朗日動力學模型,仿真結果為圖8中虛線,子系統方法仿真結果為圖8中實線。圖8(a)、(b)、(c)分別為圖7中角度θ1的角位置、角速度及角加速度隨時間的變化關系曲線,子系統模型仿真結果與拉格朗日模型仿真結果基本一致,由此驗證了子系統方法的正確性。由于拉格朗日模型采用解析方法,而子系統模型采用數值方法,存在一定計算誤差,故圖中曲線不完全重合。

圖8 仿真結果Fig.8 Simulation results
4 結論
將剪式可展機構劃分成簡單子系統,為每個子系統添加虛物體,獨立求解每個子系統的運動方程,并根據子系統間的拓撲關系進行組合或遞推,得到整個系統的等效質量矩陣及等效力向量,從而減小了求解規模。該建模方法適用于具有多個相互耦合的開環或閉環子系統的復雜多體系統,建模方法易于程式化。通過與傳統方法比較驗證了該方法的正確性。
[1]楊 毅,丁希侖.剪式單元可展機構靜力學分析與拓撲優化設計[J].中國機械工程,2010,21(2):184-189.
YANG Yi,DING Xi-lun.Analysis and topology optimization of deployable mechanism based on pantograph[J].China Mechanical Engineering,2010,21(2):184-189.
[2] Kipe G,S?ylemez E, ?zgür Kisisel A U.A family of deployable polygons and polyhedral[J].Mechanism and Machine Theory,2008,43(5):627-640.
[3] Cherniavsky A G,Gulyayev V I,Gaidaichuk V V,et al.Large deployable space antennasbased on usage ofpolygonal pantograph[J].Journal of Aero Space Engineering,2005,18(3):139-145.
[4] Oh J K,Lee A Y.Design and control of bridge inspection robot system[C].Proceedings of the IEEE International Conference on Mechatronics and Automation,2007:3634-3639.
[5] Kim S S.A subsystem synthesis method for efficient vehicle multibody dynamics[J].Multibody System Dynamics,2002,7(2):189-207.
[6]王 皓,林忠欽,來新民.平面機械系統動力學建模的復合方法[J].中國科學 E 輯:技術科學,2008,38(5):715-728.
WANG Hao,LIN Zhong-qin,LAI Xin-min.Composite method for dynamics modeling of planar mechanical system[J].Science in China,2008,38(5):715-728.
[7] Jain A.Recursive algorithms using local constraint embedding for multibody system dynamics[C].Proceedings of the ASME 2009 International Design Engineering Technical Conferences&Computers and Information in Engineering Conference.San Diego,USA:ASME,2009,4:139-147.
[8] Kim S S,Wang J H.Subsystem synthesis methods with independent coordinates for real-time multibody dynamics[J].Journal of Mechanical Science and Technology,2007,19(1):312-319.
[9] Tsai F F,Haug E J.Real-time multibody system dynamic simulation:partⅠ a modified recursive formulation and topologicalanalysis [J]. Mechanics Based Design of Structures and Machines,1991,19(1):99-127.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
