帶雙軸太陽帆板驅動器的衛星建模與姿態控制
2013-09-20 05:50:22甘克力周明瑋葛升民王磊沈毅
電機與控制學報 2013年1期
關鍵詞:振動
甘克力, 周明瑋, 葛升民, 王磊, 沈毅
(1.哈爾濱工業大學控制科學與工程系,黑龍江哈爾濱 150001;2.中國空間技術研究院,北京 100094)
0 引言
為了充分利用太陽能電池產生的電能,衛星上均附帶有太陽帆板。為使太陽能電池達到盡可能高的利用率,衛星還安置了驅動裝置,其主要使命是帶動電池陣轉動并使其法線與太陽光射束重合,以獲取盡可能多的電能。傳統衛星太陽帆板驅動機構只有一個自由度,目的是控制太陽帆板使其與太陽光線垂直,但對太陽帆板引起的撓性振動卻沒有任何的抑制作用。到目前為止,僅僅在少數幾篇報道性文獻中提及雙自由度太陽帆板驅動機構[1]:在銥星的系統介紹中提及使用了雙自由度太陽帆板驅動器;α國際空間站文章介紹的圖片中標明了帆板可以分別繞α軸和β軸轉動。除此之外,還沒有看到國外關于有關機構控制律介紹的文章。
早期航天器姿態控制大都基于傳統的控制系統設計方法:P W Likins和A H Gale的研究為撓性航天器動力學與控制的研究奠定了理論基礎[2];Hughes花費了相當多的精力研究系統動力學分析與控制問題[3]。現代控制理論中,文獻[4-5]提出了幾種柔性航天器的控制方法;滑模變結構控制作為一種具有快速響應、對模型不確定性和外界干擾同時具有良好魯棒性的設計工具,被廣泛應用在航天器的姿態控制上[6-7];文獻[8 -9]采用了自適應控制方法來處理轉動慣量不確定性以及干擾力。
上述方法是在單自由度太陽帆板驅動的情況下設計的,均受到帆板與衛星本體動力學耦合的影響。本文采用的雙自由度太陽帆板驅動機構,可以控制帆板繞其橫軸和縱軸兩個方向轉動,使太陽帆板振動和衛星本體的轉動之間實現解耦,減小帆板振動對衛星本體的影響,提高衛星的控制精度[10]。雙自由度太陽帆板驅動機構在兩個自由度的方向上都設置有檢測裝置和驅動裝置,第二個自由度由獨立的電機控制,可以實現與衛星本體分開機動的功能。尤其是針對衛星大角度機動,可以采用衛星本體和帆板分開機動的策略,即衛星本體由姿態控制單元執行機構驅動,帆板由第二個自由度的電機驅動。機動方式也可以根據機動要求選擇同時機動或分步機動。顧名思義,機動即帆板和衛星本體在同一時間開始機動;分步機動則是先控制衛星本體跟蹤期望姿態角,此時帆板不跟隨衛星本體轉動,衛星本體到達期望位置后,再控制帆板轉到帆板與衛星本體的連接支架平面內。這種驅動方式能夠使太陽帆板撓性振動對衛星姿態機動的影響大大減小,提高衛星姿態控制精度。
本文針對帶撓性太陽帆板的衛星,采用雙自由度帆板驅動機構,對其動力學方程進行建模,在此基礎上利用反饋線性化方法結合經典PD控制設計衛星姿態機動的控制律并進行仿真。
1 帶雙軸帆板驅動器衛星動力學模型
雙軸太陽帆板驅動模型如圖1所示,其中驅動電機采用無刷直流電機,角度傳感器采用旋轉變壓器。
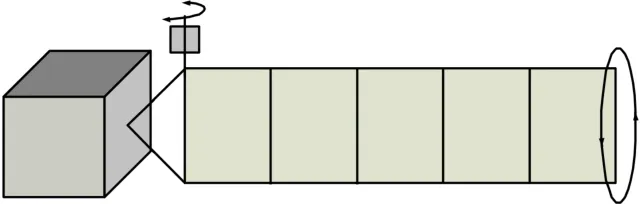
圖1 帶雙軸太陽帆板驅動器的衛星簡化模型Fig.1 Model of satellite with dual axis solar array actuator
假設衛星由一個中心剛體B和m個一端與其相連的撓性附件Bi構成,其中i=(1,2…,m),此處考慮的是安裝有一個太陽帆板的衛星,故動力學方程中取m=1。由文獻[11]可知,一般的帶有撓性附件衛星的動力學方程為
式中:Btrani為平動耦合系數矩陣;Broti為轉動耦合系數矩陣;mT為整星質量;VT為質心線速度;F為作用在衛星上的外力;IT為未變形衛星的慣量陣;ω為衛星的絕對角速度;TSAT為系統相對于質心的力矩;ζi為結構阻尼對角陣;Λi為振型頻率對角陣;qi為模態坐標。
當衛星進行大角度機動或與空間站對接時,一般忽略軌道推進引起的撓性振動,只考慮平移運動與姿態的耦合,故忽略平動耦合系數的影響。假設已用有限元法求得在帆板坐標系中的帆板轉動的耦合系數矩陣,下文中用Q來表示該耦合系數矩陣。由于第2節控制律設計過程中將用到四元數,為區別開來,改用η表示帆板振動的模態坐標,則忽略平動后的衛星動力學方程為

由于帆板是雙自由度的電機控制,所以帆板的振動只和帆板自身的轉動耦合,可單獨列寫帆板的姿態動力學方程為

其中,α為帆板轉角,Is為太陽帆板的轉動慣量,Tα為施加在帆板上的力矩。
當第二個自由度電機對帆板施加力矩來驅動帆板轉動的同時,對衛星本體也施加了一個同樣大小的反作用力矩,因此,帶有太陽帆板雙軸驅動器的衛星動力學方程變為

其中,I為衛星本體轉動慣量矩陣。
2 控制律設計
下面進行帶有雙軸太陽帆板驅動器衛星的姿態控制律設計。本文提出帆板與衛星本體分開機動的新型方案,將帆板與衛星本體分開控制,實現帆板和衛星本體之間的振動解耦,即帆板由第二個自由度電機控制驅動,衛星本體由中心剛體內部的執行機構控制,控制模型的方框圖如圖2所示。
由于所建立的動力學模型中帶有一定的非線性,因此本文采用反饋線性化方法來設計衛星姿態控制律[12]。這種方法的核心思想是把一個非線性系統代數地轉化為一個線性系統,以便可以應用線性化系統的技巧。
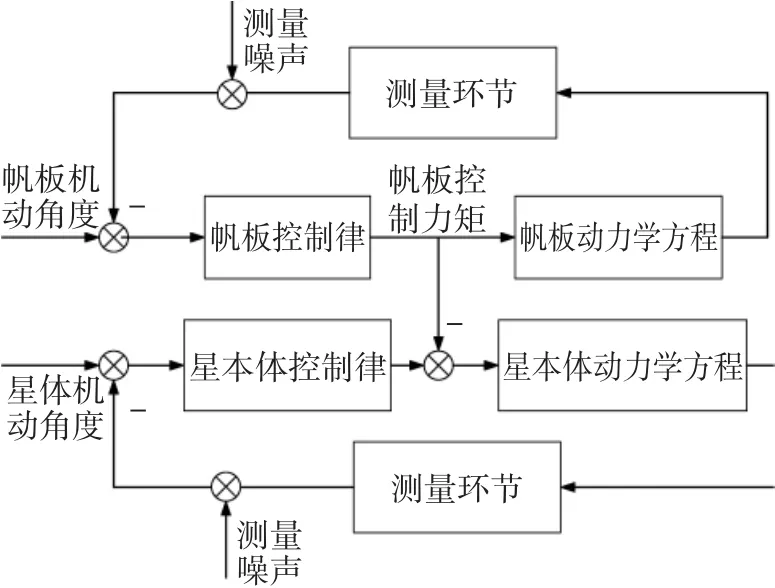
圖2 雙軸太陽帆板衛星控制方框圖Fig.2 Control block diagram of satellite with dual axis solar array actuator
根據反饋的方式和需要可分為輸入-狀態反饋線性化和輸入-輸出反饋線性化兩種形式。本文采用狀態反饋線性化,如圖3所示。
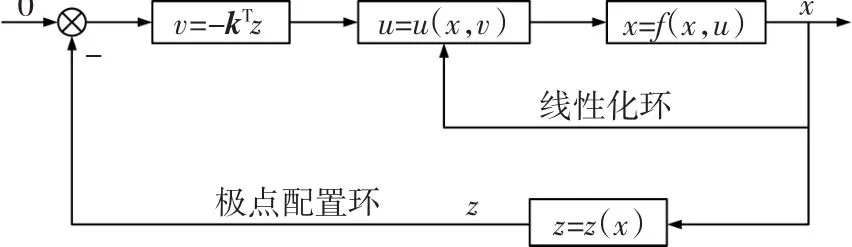
圖3 狀態反饋線性化方框圖Fig.3 Block diagram of feedback linearization
2.1 太陽帆板控制律設計
將式(3)中兩式組合,得

其中,ωT為帆板模態振動頻率向量。式(5)經整理后可得

設帆板轉角控制指令值為αc,則誤差角e=ααc,由式(3)得

由反饋線性化原理可得

其中,Kp>0,Kd>0,且有

2.2 衛星本體控制律設計
由于常用的歐拉角姿態方程在大角度機動時會出現奇異問題,因此在姿態控制系統設計時,往往采用四元數表示的運動學方程。設ω為衛星本體坐標系相對于慣性坐標系的角速度矢量,它在本體坐標系中的分量可以表示為:[ωxωyωz]T,設q·是軌道坐標系旋轉到本體坐標系的四元數矢量,且q=q0+q1i+q2j+q3k,則應用四元數表示法時,衛星的運動學方程[13-14]可以表示為
其矩陣形式為

其矩陣形式為

分別用W和A表示Ω(ω)和A(q)運算矩陣,假設qe為誤差四元數,qc為目標四元數,則
由式(10)和式(11)可知

其中ωe為誤差角速度,于是有
根據反饋線性化原理
由于太陽帆板的安裝結構和帆板分步機動的原因,太陽帆板轉動的角度和衛星本體機動的角度不同,如圖4所示a為太陽帆板連接軸的長度,b為帆板實際長度,衛星開始機動時刻帆板所在平面為OYZ平面。在分步機動的情況下,定義衛星本體轉動角度為φ,則連接軸隨本體的轉動角度也為φ,但太陽帆板并不隨其轉動,定義帆板與連接軸之間的夾角為α。因此當帆板再需轉到OYZ平面內時,需轉動的角度為α,則α與φ有如下關系。
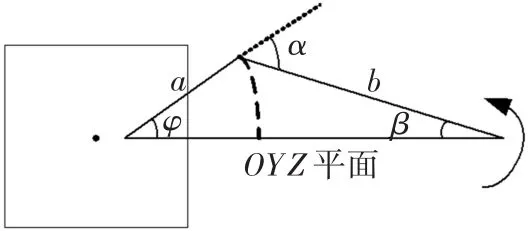
圖4 帆板連接結構簡圖Fig.4 Diagram of array connection mechanism
由正弦定理
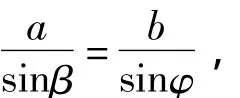
其中,β=α-φ。
因此得出帆板轉動角度和衛星本體轉動角度的關系為
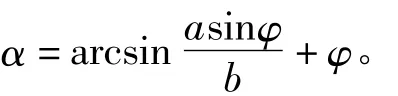
根據所研究衛星的結構和參數,經過計算,得出a=2.1,b=18。
3 Matlab仿真
本文討論的某衛星由一個中心剛體和一個太陽帆板組成。中心剛體的尺寸為1.6 m×2 m×2.5 m,質量為400 kg。太陽帆板的安裝位置與剛體部分的質量中心偏離40 cm。太陽帆板長18 m,寬2 m。整個衛星沿其星體主軸坐標系的轉動慣量是:Ix=5 954 kg·m2;Iy=1 765 kg·m2,Iz=6 042 kg·m2。
其中涉及的參數帆板轉動慣量為Is=276 kg·m2,帆板前三階振型與轉動的耦合系數分別為6、-5.45、4.008。帆板和衛星本體控制參數如下:滾動軸帆板控制參數為Kpsx=17.18,Kdsx=91.62;衛星本體控制參數為Kpax=535.86,Kdax=2857.9。俯仰軸衛星本體控制參數Kpay=158.85,Kday=847.2。偏航軸衛星本體控制參數 Kpaz=543.78,Kdaz=2900.2。由于機構的限制,帆板只能控制繞滾動軸的轉向,故俯仰軸和偏航軸的控制參數為0。
衛星初始姿態角為[10°-13°15°],穩定到0°后,滾動角機動60°,其他兩軸姿態角度保持0°。衛星本體于50 s機動,帆板于80 s機動。分步機動情況下的姿態角響應、四元數變化曲線和帆板振動的模態坐標曲線分別如圖5~圖7所示。
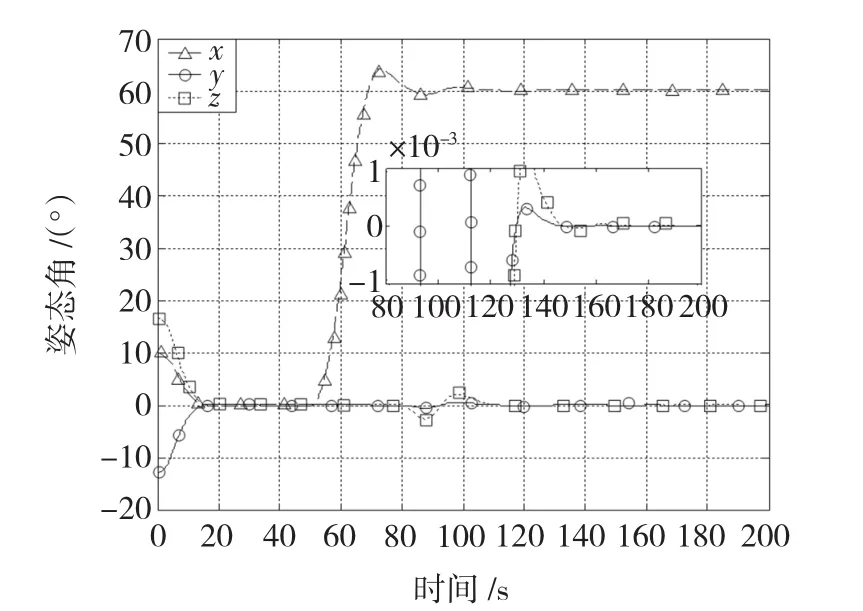
圖5 分步機動情況下的姿態角響應曲線Fig.5 Attitude angles response of synchronized maneuver strategy
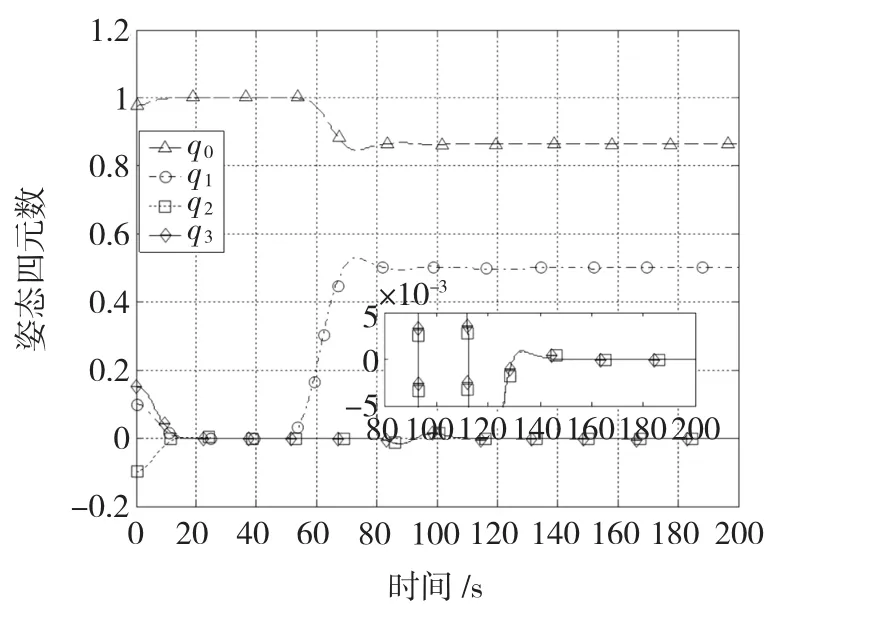
圖6 分步機動情況下的四元數響應曲線Fig.6 Attitude quaternion curves of synchronized maneuver strategy
為了與單軸太陽帆板衛星進行對比,本文采用實際工程中應用的PD控制律對單軸驅動情況下的控制系統進行設計。其中俯仰軸采用極點配置法,經過仿真調試,最終確定的控制參數為Kp=158,Kd=748,其控制律取為

式中:Tcy為俯仰通道控制力矩,θe為俯仰角誤差。
由于滾動軸和偏航軸的姿態運動是耦合的,所以先對兩軸的運動進行解耦,然后分別進行控制。為了達到姿態運動的解耦,設計控制律為

式中:Tcx、Tcx為兩軸控制力矩,ψ、φ為滾轉角和偏航角,ITx、ITy、ITz為 IT的三軸分量,控制參數如下:滾動軸控制參數為Kpx=535.86,Kdx=2679.3;俯仰軸控制參數為 Kpz=543.78,Kdz=2718.9。
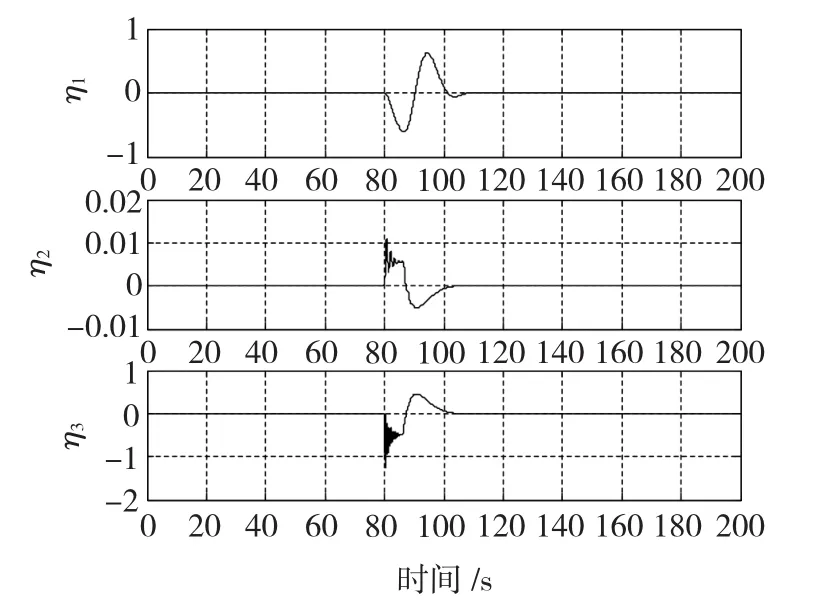
圖7 分步機動情況下的帆板模態坐標Fig.7 Solar array modal coordinate of synchronized maneuver strategy
本節驗證雙軸太陽帆板在抑制撓性振動和提高姿態穩定精度方面的可行性與優勢。下面僅給出單軸太陽帆板衛星三軸姿態角仿真曲線即可說明問題。圖8~圖10分別為單軸驅動情況下衛星俯仰軸、滾轉軸和偏航軸的響應曲線。仿真條件為:衛星初始姿態角為[10°-13°15°],三軸初始角速度均為0。此處對X軸進行姿態機動控制,其它兩軸進行姿態穩定控制這種典型情況進行仿真。
由圖5~圖7可以看出,在雙軸驅動情況下,初始狀態下三軸姿態角經過約15 s達到穩定。滾動角機動后經過約30 s達到目標姿態。滾動角的超調量控制在10% ~15%內,穩定精度優于 ±0.001°,俯仰角和偏航角穩定時間為20 s。帆板于機動后經過約25 s重新轉到OYZ平面內。由圖8中帆板前三階模態坐標曲線可知,帆板的撓性振動得到了較好的抑制。而單太陽帆板衛星仿真中,滾動角的超調量達到20%,穩定精度由于帆板振動的影響為±0.1°,俯仰和偏航角穩定時間為25 s。
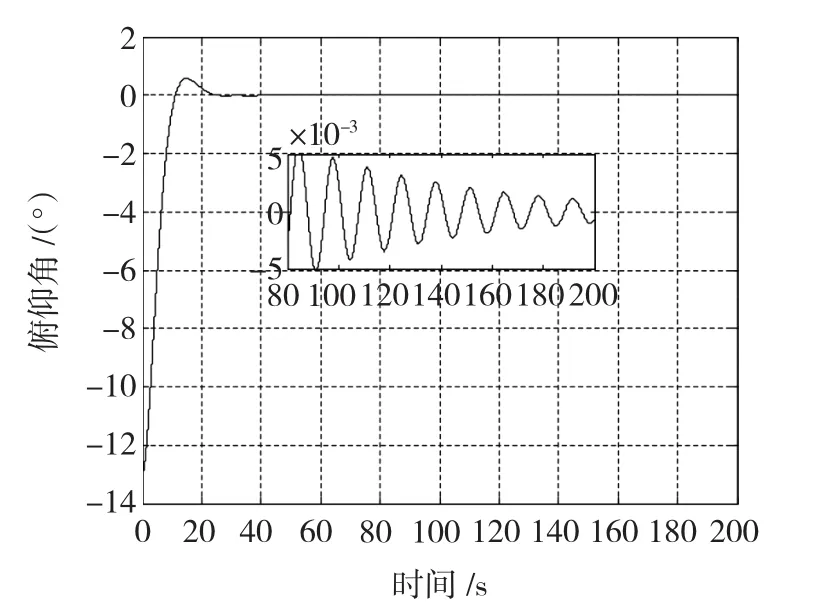
圖8 單軸太陽帆板衛星俯仰角響應曲線Fig.8 Pitch angle response of satellite with single axis solar array actuator
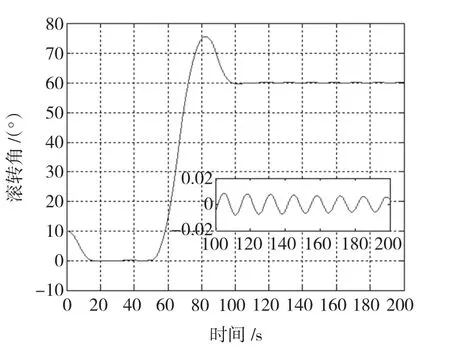
圖9 單軸太陽帆板衛星滾轉角響應曲線Fig.9 Roll angle response of satellite with single axis solar array actuator
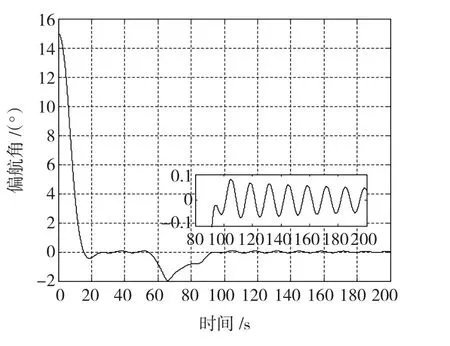
圖10 單軸太陽帆板衛星偏航角響應曲線Fig.10 Yaw angle response of satellite with single axis solar array actuator
4 結語
由仿真結果可見,采用雙自由度太陽帆板驅動機構明顯減少了太陽帆板撓性振動的次數和振幅,并極大的縮短了穩定時間;實現了帆板振動和衛星本體之間的解耦,有效的抑制了帆板振動對姿態角穩定精度的影響,將姿態穩定精度提高了2個數量級。
[1]高星,王友平.太陽帆板驅動機構的現狀和近期發展方向[J].控制工程,2006,5:54-56.
GAO Xing,WANG Youping.Current situation and development tendency of solar array drive mechanism[J].Control Engineering of China,2006,5:54 -56.
[2]LIKINS P W,GALE A H.The analysis of interaction between attitude control systems and flexible appendages[C]//Proceedings of the 19th International Astronautical Congress,October 13 -19,1968,New York,USA.1968,2:67-90.
[3]HUGHES P C.Attitude dynamics of a three-axis stabilized satellite with a large flexible solar array[J].Journal of the Astronautical Sciences,1972,10(3):166 -189.
[4]BEN A J,BURNS J A,CLIFF E M.Time-optimal slewing of flexible spacecraft[J].Journal of Guidance,Control,and Dynamics,1992,15(2):360-367.
[5]KELLKAR A G,JOSHI S M.Global stabilization of flexible multibody spacecraft using quaternion-based nonlinear control law[J].Journal of Guidance,Control,and Dynamics,1996,19(5):1186-1188.
[6]靳永強,劉向東,候朝楨.含有參數不確定性的撓性航天器姿態跟蹤滑模控制[J].控制理論與應用,2009,26(3):299-304.
JIN Yongqiang,LIU Xiangdong,HOU Chaozhen.Sliding-mode attitude tracking control for a flexible spacecraft with parametric uncertainty[J].Control Theory and Applications,2009,26(3):299-304.
[7]管萍,劉小河,劉向杰.撓性衛星的變結構姿態控制[J].控制理論與應用,2007,24(3):480-484.
GUAN Ping,LIU Xiaohe,LIU Xiangjie.Variable structure attitude control of flexible satellite[J].Control Theory and Applications,2007,24(3):480 -484.
[8]GENNARO S D.Adaptive robust tracking of flexible spacecraft in presence of disturbance[J].Journal of Optimization Theory and Applications,1998,98(3):545 -568.
[9]焦曉紅,張立堯.撓性航天器姿態機動和振動抑制的自適應控制[J].電機與控制學報,2011,15(7):94-100.
JIAO Xiaohong,ZHANG Liyao.Adaptive output feedback control of attitude maneuver and vibration suppression for flexible spacecraft[J].Electric Machines and Control,2011,15(7):94-100.
[10]周明瑋.帶雙軸太陽帆板驅動器的衛星建模與控制[D].哈爾濱:哈爾濱工業大學控制科學與工程系,2010:11-56.
[11]屠善澄.衛星姿態動力學與控制(4)[M].北京:宇航出版社,2006:420-424.
[12]HASSAN K Khalil.Nonlinear Systems[M].Beijing:Publishing House of Electronics Industry,2007:505 -544.
[13]王淑一,魏春嶺,劉其瑞.敏捷衛星快速姿態機動方法研究[J].空間控制技術與應用,2011,37(4):36-40.
WANG Shuyi,WEI Chunling,LIU Qirui.A quick attitude maneuver algorithm for agile satellites[J].Aerospace Control and Application,2011,37(4):36 -40.
[14]陳萬春,肖業倫,趙麗紅,等.四元數的核心矩陣及其在航天器姿態控制中的應用[J].航空學報,2002,21(5):389-392
CHEN Wanchun,XIAO yelun,ZHAO Lihong,et al.Kernel matrix of quaternion and its application in spacecraft attitude control[J].ACTA Aeronautica et Astronautica Sinica,2002,21(5):389-392.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2018年4期)2018-09-14 03:40:58
數學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00