基于遺傳算法的塔式起重機定位和防擺研究
2013-10-20 10:37:24游誼胡偉張自強曾經宇熊彤
機械制造與自動化 2013年6期
關鍵詞:系統
游誼,胡偉,張自強,曾經宇,熊彤
(上海師范大學信息與機電工程學院,上海201418)
0 引言
隨著建筑業的發展,塔機是建筑施工的主要運輸機械。在搬運過程中,由于會受到外界因素的影響(如風力和摩擦力)以及操作人員工作經驗的限制,會引起小車定位不準確和負載擺動幅度大等問題,勢必會影響工作效率,給施工人員帶來安全隱患。因此有必要研究起重機快速對位和消除擺動的方法。[1-2]以往控制算法多采用模糊PID控制,雖然在處理復雜系統如塔式起重機這樣的大時滯性、時變及非線性系統時,顯示出一定的優越性,但簡單的模糊控制在復雜系統的控制中仍表現出諸多的局限性。如在系統調試過程中需花費很長時間去調整隸屬函數與控制規則以達到良好的控制效果。[3-4]與模糊PID控制相比,遺傳算法不需要編輯復雜的控制規則,避免了前期大量規則庫整理工作和仿真實驗。文中采用遺傳算法對起重機對位和防擺問題進行分析,實驗結果表明該方法的可行性和有效性。
1 塔式起重機的數學模型
起重機防擺系統是一個典型動力學系統,根據其力學特性,采用分析力學中拉格朗日方程來建立起重機防擺系統的數學模型。[5-6]塔式起重機簡化模型如圖1所示。
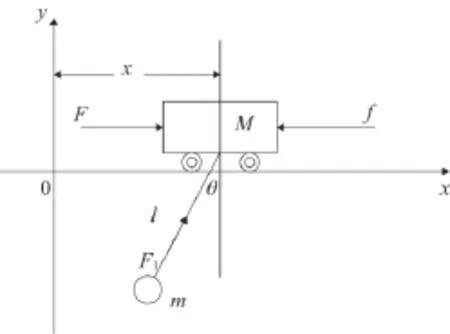
圖1 起重機簡化模型
根據拉格朗日方程對起重機防擺系統進行受力分析可得:
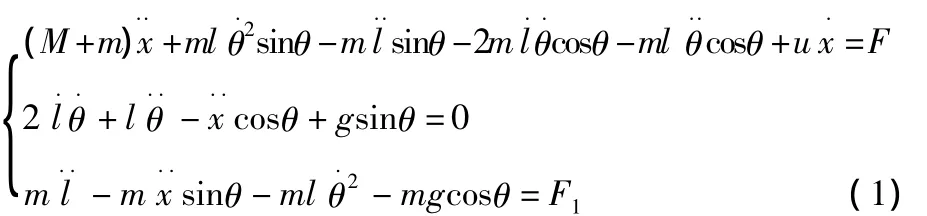
式中:M為小車質量;m為負載質量;l為懸繩的繩長;θ為懸繩擺角;系統受到的外力有小車驅動力F,鋼絲繩起升力F1,小車與軌道之間的摩擦力f。由于本文研究塔吊負載水平運動過程中消擺控制,不考慮負載的提升,即繩長不變的情況。所以:

可得到定繩長的起重機防擺系統的數學方程為:

由于吊車運行中擺角不會超過10°,且平衡位置時θ=0,式(1)進一步簡化得:
本文實驗的目的是在給定一個行走距離參考值的情況下,牽引小車安全到達指定位置,并且消除負載擺動。也就是說根據給定的小車行走距離和反饋回來負載擺角信號,通過控制算法計算輸出相應的電信號給驅動電機,控制小車帶動負載快速到達指定位置,同時做到懸繩擺角消減為零。
2 遺傳算法與模糊控制
2.1 模糊控制主要特點
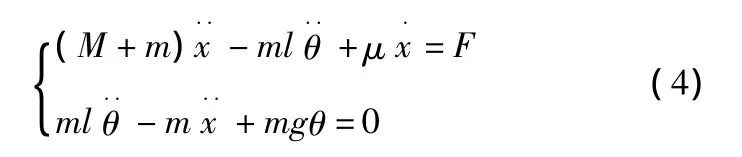
模糊控制是對難以用已有規律描述的復雜系統,[7-10]采用基于自然語言控制規則,模糊推理的計算機控制技術,它不依賴與控制系統的數學模型,而是依賴于操作過程中人員控制經驗歸納成定性描述的一組條件語句,[11-13]然后運用模糊集合理論將其量化為模糊語言集,從而構成控制算法。[14-15]模糊PID定位防擺控制系統的仿真框圖如圖2所示。
圖2 模糊PID控制器的結構
2.2 遺傳算法基本原理
遺傳算法(GA)是美國Michigan大學Holland教授提出的模擬自然界遺傳機制和生物進化論的一種并行搜索最優化辦法。它將“優勝劣汰,適者生存”的生物進化原理引入優化參數形成的編碼串群體中,按照所選擇的適配值函數并通過遺傳中的幅值,交叉及變異對個體進行篩選,使適配值高的個體被保留下來,組成新的群體,新的群體既繼承了上一代的信息,又優于上一代。這樣周而復始,群體中個體適應度不斷提高,直到滿足條件。[16]文中用于起重機定位和防擺的算法,就是基于遺傳算法提出的,再結合工業控制中應用廣泛的PID算法,組成遺傳算法優化的PID整定,即可實現對PID參數的最佳調整,因此可以被用于塔式起重機的自動控制中。其整定原理如下所示。
1)參數確定及表示
首先確定參數范圍,然后根據精度的要求,對其進行編碼。選取二進制字串來表示每一個參數,并建立與參數間的關系。
2)選取初始種群
由計算機隨機產生初始種群。例如:針對二進制編碼而言,先產生0-1之間均勻分布的隨機數,然后確定產生的隨機數0-0.5之間代表0,0.5-1之間代表1。另外根據計算的復雜程度確定種群大小。
3)適配函數的確定
為了防止控制信號過大,系統出現不穩定,又不因控制量過小,造成系統響應時間過長,就需要控制量,誤差,上升時間作為適配函數的約束條件。這是因為適配函數與目標函數相關,最優控制的參數也就是在滿足約束條件下使f(y)最大時,y對應的控制器參數。
4)遺傳算法的操作
首先利用適度值比例法進行復制。即通過適配函數,進而求每個串對應的復制概率。復制概率與每代字串的個數乘積為該字串在下一代中應復制的個數。復制概率大的在下一代中將有較多的子代,相反的被淘汰。其次進行單點交叉、交叉概率為Pc。從復制后的成員里以Pc概率選取字串組成匹配池,然后隨機對匹配池成員匹配,交叉位置隨機確定。最后以概率Pm進行變異。初始種群通過復制、交叉及變異得到新一代種群,該種群經解碼后代入適配函數,觀察是否滿足結束條件,若不滿足,則重復以上操作指導滿足為止[16]。
3 遺傳算法流程圖
利用遺傳算法優化Kp、Ki、Kd的具體步驟如下:
1)確定每個參數的大致范圍,進行編碼;
2)隨機產生n個個體構成初始種群P(0);
3)將種群中各個體解碼成對應的參數值,用此參數求代價函數值J及適應函數值f,取f=1/J;
4)應用復制、交叉、變異算子對種群P(t)進行操作,產生下一代種群P(t+1);
5)重復步驟3)和4),直至參數收斂或達到預期目標。
遺傳算法流程圖如圖3所示。
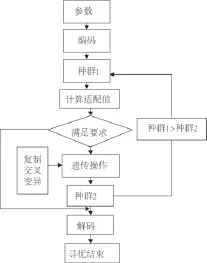
圖3 遺傳算法流程圖
4 仿真實驗與分析
為了驗證算法的可行性,對基于遺傳算法的PID控制進行了仿真實驗,與模糊PID算法相比,仿真結果表明了該方法的可行性和良好的控制效果。塔式起重機模型參數:小車質量M=3 kg,負載質量m=0.2 kg,繩長l=1 m,位移X=3 m。遺傳算法中使用的樣本個數為Size=30,交叉概率和變異概率分別為:Pc=0.90,Pm=0.033。為了防止遺傳算法尋優區域局部最優解,采用保留最優個體法。經遺傳算法優化后所得到的三個參數的數值分別為:kp=7.851 2,ki=0.220 9,kd=2.850 9。仿真結果如圖3,圖4,圖5,圖6所示。
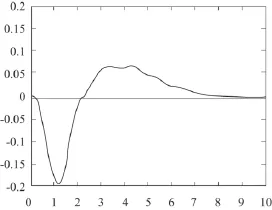
圖3 模糊PID控制位移曲線
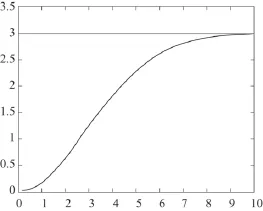
圖4 模糊PID控制位移曲線
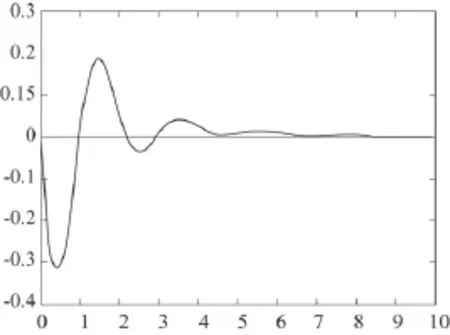
圖5 遺傳算法PID控制擺角曲線
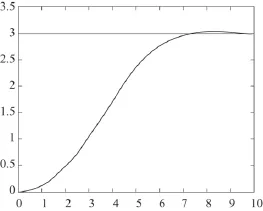
圖6 遺傳算法PID控制位移曲線
在相同的實驗條件下,圖3和圖4給出了采用模糊PID控制的仿真結果。圖5和圖6是遺傳算法優化的PID控制擺角位移曲線。通過對比可以得到,基于遺傳算法PID整定的擺角曲線在5 s內幾乎減小至零,衰減速度優于模糊PID算法3 s左右;位移曲線在7 s時到達指定位移,與模糊PID位移曲線的響應時間相比提高了3 s左右。從仿真圖中可以看出基于遺傳算法的PID控制,在準確對位和快速消擺上更勝一籌,用于建筑施工時更有利于防止事故的發生。
5 結語
文中對塔式起重機定位和防擺進行了研究,采用遺傳算法優化PID參數,它具有操作方便,速度快的優點。不需要復雜的規則,只通過簡單的復制、交叉及變異,便可以達到尋優,避免前期大量整理工作,為實現復雜系統的控制提供了有效途徑,同時也提高了穩態精度和收斂速度,在實現起重機定位和快速消擺的問題上,取得良好的控制效果。
[1]馬曉虹.一種模糊自適應PID控制器的設計[J].大慶師范學院學報,2009,29(3):37-39.
[2]李偉.基于時間最優的起重機消擺控制策略[J].山東工業大學學報,1998,28(2):107-111.
[3]華克強.橋式吊車模糊防擺技術[J].中國民航學院學報,2000,18(3):12-15.
[4]薛朵,李宇成.港口集裝箱吊車的建模與模糊控制[J].機電一體化,2009,31(2):28-32.
[5]薛定宇,陳陽泉.基于MATLAB/Simulink的系統仿真技術與應用[M].北京:清華大學出版社,2003.
[6]樊京,劉叔軍,蓋曉華,等.MATLAB控制應用與實例[M].北京:清華大學出版社,2008.
[7]姜興華,尹志宇,郭晴.一種模糊自整定PID控制器的設計與仿真[J].河北師范大學學報(自然科學版),2009,33(4):448-450.
[8]曾光奇,胡均安,王東,等.模糊控制理論與工程應用[M].武漢:華中科技大學出版社,2006.
[9]張靜等.MATLAB在控制系統中的應用[M].北京:電子工業出版社,2007.
[10]席愛民.模糊控制技術[M].西安:西安電子科技大學出版社,2008.
[11]王正林,王勝開,陳國順.MATLAB/Simulink與控制系統仿真[M].北京:電子工業出版社,2005.
[12]蔣理,陳樹廣.基于模糊控制的橋式起重機定位防擺研究[J].計算機仿真,2009,26(6):179-182.
[13]但堂詠.岸邊橋式起重機智能防搖機理研究[D].武漢:武漢理工大學,2005.
[14]王宏,黎亞元,陳守強,姚悠然.起重機模糊控制系統的研究[J].機電工程技術,2006,35(9):18-20.
[15]石辛民,郝整清.模糊控制及其MATLAB仿真[M].北京:清華大學出版社,2008.
[16]劉金琨.先進PID控制及其 Matlab仿真(第2版)[M].北京:電子工業出版社,2005.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
