輸入整形法在起重機中的應用
2013-10-20 10:37:24任會禮付玲李向國高常春梅志千孫雷
機械制造與自動化 2013年6期
任會禮,付玲,李向國,高常春,梅志千,孫雷
(1.長沙中聯重工科技發展股份有限公司,湖南長沙410013;2.河海大學機電工程學院,江蘇常州213022)
0 引言
起重運輸機械既是提升、搬運和輸送物料及產品的機具,亦是提高勞動生產率和生產過程機械化不可缺少的大型機械設備。龍門起重機是指水平橋架設置在2條支腿上構成門架形狀的一種橋架型起重機。這種起重機在地面軌道上運行,主要用在露天貯料場、船塢、電站、港口和鐵路貨站等地進行搬運和安裝作業[1]。
起重機自誕生至今,起重機吊裝過程中吊重的擺動問題一直困擾著人們。起重小車移動時,由于吊重慣性力的存在,將引起吊重的大幅擺動,為了避免對吊重擺動的激勵,起重機操作人員必須放緩動作,使這些擺動不會引起安全事故和對起重機結構的破壞,這樣大大降低了裝卸和轉運效率[2-3]。
文獻[4]采用延遲反饋和模糊控制策略對龍門起重機和塔式起重機進行防搖控制,延遲反饋加大了系統阻尼;文獻[5]采用輸入整形法和數字濾波器對橋式起重機進行控制,證明了輸入整形法在抑制吊重擺動上比數字濾波器響應更快;文獻[6]將輸入整形算法應用于集裝箱起重機防搖控制中,與傳統單次加速相比,輸入整形法對較小頻率變化具有魯棒性。
本文利用龍門起重機的數學模型,研究了基于輸入整形(inputting shaper,IS)法的龍門起重機吊重防搖控制。
1 龍門起重機吊重動力學模型
設小車沿吊臂水平運行,其加速度為a(t),x為小車的位移,l為鋼絲繩的長度,m為吊重的質量,θ為吊重的擺角,其物理模型如圖1所示,相應吊重擺動數學模型:

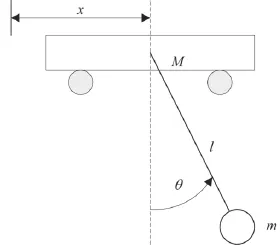
圖1 龍門起重機物理模型
2 輸入整形控制
輸入整形法是一種前饋控制技術,廣泛的應用于龍門起重機控制。這項技術是將系統的輸入與整形器中產生的一系列脈沖作卷積,結果作為控制系統的輸入來驅動系統,達到減小殘余振動的目的。輸入整形器的參數是通過解一組限制方程來獲得,根據不同限制方程就可以設計出不同整形器來限制系統殘余振動[7-8]。殘余振動的幅值可以表示為:


ω——系統固有頻率;
ζ——系統阻尼系數;
n——整形中的脈沖數;
Ai,ti——第i個脈沖的幅度和時間;
tn——最后一個脈沖的時間。
目前用于閉環系統的輸入整形器主要有ZV整形器,限制方程為V(ω,ζ)=0。由于整形器有時間延遲,通常取第一個脈沖的時間t1=0,同時為了使整形前的輸入和整形后的輸入驅動系統產生相同的運動,脈沖幅值必須滿足

對于具有兩個脈沖的ZV整形器,其脈沖輸入序列為
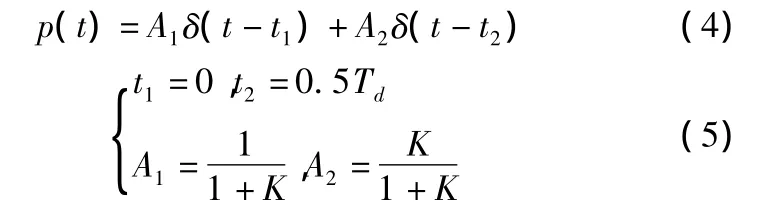
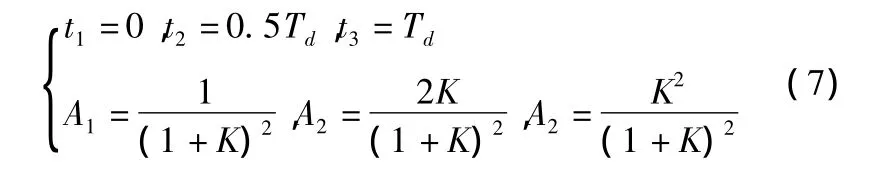
理論上,如果起重機在作業過程中懸索長度、線性阻尼不變,即系統(1)的模型參數ω,ζ保持為恒定值,ZV法可以在0.5個理論振蕩周期內,即0.5Td內完全消除由于起重機小車加速所引起的吊重擺角的波動。而在實際起重機作業過程中,系統模型參數尤其是與懸索長度相關的ω的變化不可避免,這就對ZV法在實際的起重機擺角波動抑制控制中的應用帶來了局限性。為了減少ZV法對模型參數的敏感性,學術界提出了ZVD法(Zero-Vibration and Derivative Shaper,ZVD)。ZVD法在ZV法的基礎上,增加了V對ω的變化率在ω與IS中的系統模型頻率ωm相等處為0的約束條件:

與V(ω,ζ)=0約束條件一起可以確定三脈沖ZVD法的5個參數:
ZV法消擺的能力可以看做是正弦信號的疊加過程,如圖2所示。如果兩個幅值相同、頻率相同的正弦信號它們之間以合適的相位疊加在一起,所產生的組合將沒有振蕩,即實現消擺。
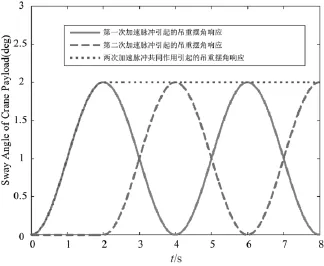
圖2 輸入整形算法消擺原理
3 仿真
根據龍門起重機數學模型和輸入整形算法,在Matlab/Simulink中構建龍門起重機仿真框圖如圖3所示。
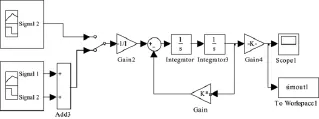
圖3 龍門起重機仿真原理圖
1)定擺長仿真實驗 當吊重繩長l為24.849 m,阻尼比為0,輸入加速度為1 m/s2,將ZV、ZVD信號和未整形信號加到圖3控制系統中,對龍門起重機進行仿真,吊重擺角的響應結果如圖4所示。
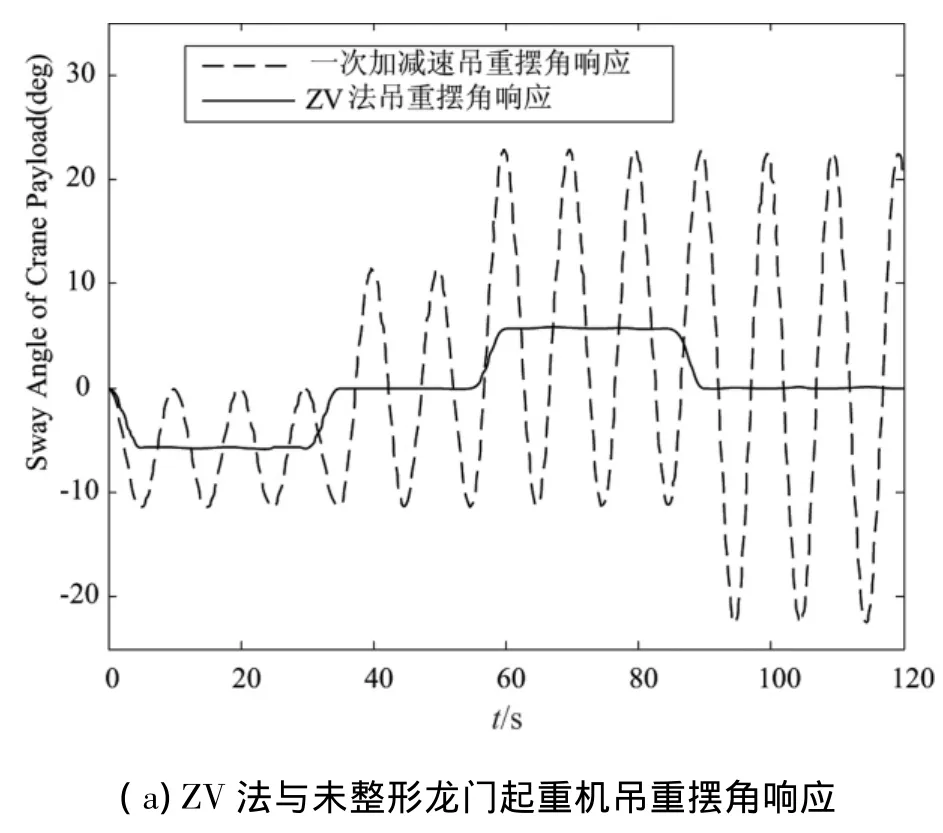

圖4 龍門起重機吊重擺角響應
從圖4中可以看出,當未整形的輸入加到系統中,吊臂定位后負載會產生等幅擺動,而將兩種經過整形后的輸入信號加到系統中后,負載在整形輸入作用結束后基本實現零殘余擺動,但經ZV整形后負載的定位和消擺時間都比ZVD要短。
2)變擺長仿真實驗 當原吊重繩長l增加25%即為31 m時,阻尼比為0,輸入加速度為1 m/s2,采用ZV法和ZVD法對龍門起重機進行仿真,吊重擺角的響應結果如圖5所示。

圖5 兩脈沖輸入整形與三脈沖輸入整形龍門起重機吊重擺角響應
從圖5中可以看出,將兩種經過整形后的輸入信號加到系統中后,負載在ZVD法輸入作用結束后的殘余擺動遠小于ZV法,說明ZVD法對吊重擺長變化的魯棒性優于ZV法。
4 結語
通過對龍門起重機在輸入整形前后的分析,輸入整形法可以抑制吊重殘余擺動,在控制上ZVD法對吊重擺長變化的魯棒性優于ZV法,而在定位和消擺時間上ZV法比ZVD法要短,在Matlab/Simulink中的仿真結果驗證了輸入整形策略對吊重防擺控制的有效性。
[1]黃大巍,李風,毛文杰,等.現代起重運輸機械[M].北京:化學工業出版社,2006.
[2]自傳悅.岸邊集裝箱起重機吊具減擺裝置[J].起重運輸機械,2005(08):23-24.
[3]林貴瑜,楊新順,渝葉平.塔式起重柵吊重擺動的控制[J].建筑機械化,2006(11):34-36.
[4]Hanafy M.Omar.Control of Gantry and Tower Cranes[D].Virginia Polytechnic Institute and State University,2003.
[5]Ziyad N.Masoud,Mohammed F.Daqaq.A Graphical Approach to Input-Shaping ControlDesign for Container Cranes With Hoist[J].IEEE Transactions on Control Systems Technology,2006,Vol.14(6):p1070-1077.
[6]William Singhose and Joshua Vaughan.Reducing Vibration by Digital Filtering and Input Shaping[J].IEEE Transactions on Control Systems Technology,2011,Vol.19(6):1441-1420.
[7]Neil C.Singer,Warren P.Seering.Preshaping Command Inputs to Reduce System Vibration [J].ASME Journal of Dynamic Systems,Measurement,and Control,1990,Vol.112,p.76-82.
[8]吳軍,李鐵民,唐曉強.平面并聯機構的殘余振動控制[J].機械工程學報,2006,42(11):49-53.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
