飛機(jī)機(jī)翼故障的動(dòng)態(tài)飛行包線(xiàn)估算方法
2013-11-05 03:04:00劉小雄
北京航空航天大學(xué)學(xué)報(bào) 2013年11期
劉小雄
(西北工業(yè)大學(xué)自動(dòng)化學(xué)院,西安710072)
孫 遜 唐 強(qiáng)
(西安飛行自動(dòng)控制研究所,西安710065)
章衛(wèi)國(guó)
(西北工業(yè)大學(xué)自動(dòng)化學(xué)院,西安710072)
在航空工業(yè)和航空航天研究機(jī)構(gòu)中,安全和可靠性問(wèn)題已經(jīng)成為創(chuàng)新技術(shù)發(fā)展的主要?jiǎng)恿Γ诳罩薪煌ㄏ到y(tǒng)中,大型民用和軍用運(yùn)輸飛機(jī)都要求能夠在暴露于外界威脅的高風(fēng)險(xiǎn)任務(wù)環(huán)境下執(zhí)行任務(wù).近年來(lái)逐漸增加的飛行事故大都是因?yàn)轱w機(jī)的控制失效,與控制失效相對(duì)應(yīng)的故障形式主要是機(jī)體(機(jī)身、機(jī)翼和尾翼)和操縱面故障,因?yàn)轱w機(jī)的操縱機(jī)構(gòu)都會(huì)存在疲勞、結(jié)構(gòu)變化、腐蝕、裝配誤差等影響,使得操縱機(jī)構(gòu)易發(fā)生卡死、松浮、損傷等故障,影響飛機(jī)的飛行性能,進(jìn)而使得飛機(jī)的安全飛行包線(xiàn)縮小.如果能采取有效措施,在操縱機(jī)構(gòu)故障時(shí)能夠快速計(jì)算并保護(hù)控制飛機(jī)的安全飛行包線(xiàn),同時(shí)給駕駛員提供必要的信息,對(duì)提高飛機(jī)的飛行安全具有重要的意義.
對(duì)故障情況下的飛機(jī)進(jìn)行動(dòng)態(tài)飛行包線(xiàn)評(píng)估與保護(hù)控制是一項(xiàng)新技術(shù),是對(duì)飛行管理和飛行控制技術(shù)進(jìn)行完善性研究工作.該項(xiàng)研究起源于美國(guó)國(guó)家航空航天局2005年開(kāi)始進(jìn)行的集成自適應(yīng)飛行控制計(jì)劃中提到的動(dòng)態(tài)飛行包線(xiàn)估計(jì)與預(yù)測(cè)方法,研究的主要內(nèi)容是對(duì)飛機(jī)進(jìn)行狀態(tài)估計(jì)、實(shí)時(shí)故障診斷、氣動(dòng)參數(shù)估計(jì)和飛行包線(xiàn)估算,估計(jì)與預(yù)測(cè)飛行器結(jié)構(gòu)變化所導(dǎo)致的飛行包線(xiàn)變化情況,然后應(yīng)用重構(gòu)控制方法進(jìn)行容錯(cuò)控制[1-9].文獻(xiàn)[1-2]分別進(jìn)行大型飛機(jī)操縱面故障時(shí)的飛機(jī)動(dòng)力學(xué)建模問(wèn)題研究;文獻(xiàn)[3]研究了一種動(dòng)態(tài)飛行包線(xiàn)估計(jì)與預(yù)測(cè)方法;文獻(xiàn)[4-5]提出了一種自適應(yīng)飛行包線(xiàn)估計(jì)與保護(hù)方法,通過(guò)集成故障檢測(cè)方法進(jìn)行故障檢測(cè)和包線(xiàn)估計(jì);文獻(xiàn)[6-7]提出一種基于可達(dá)集的動(dòng)態(tài)包線(xiàn)估計(jì)方法,能夠估算不同配平點(diǎn)上的安全飛行包線(xiàn);文獻(xiàn)[8]采用故障檢測(cè)和基于模型的方法進(jìn)行飛行包線(xiàn)的預(yù)測(cè).
總結(jié)已有的研究成果,飛機(jī)故障對(duì)飛行包線(xiàn)的影響已經(jīng)成為飛行安全問(wèn)題的一個(gè)重要研究?jī)?nèi)容,同時(shí)也是一個(gè)值得挑戰(zhàn)的研究課題.基于上述研究?jī)?nèi)容本文提出一種新的機(jī)翼故障時(shí)飛行包線(xiàn)的精確估計(jì)方法,為駕駛員正確操縱和包線(xiàn)保護(hù)控制提供必要的信息,可應(yīng)用于各種飛機(jī)的動(dòng)態(tài)飛行包線(xiàn)估算
1 問(wèn)題描述
機(jī)翼作為產(chǎn)生空氣動(dòng)力的主要部件,故障時(shí)將對(duì)飛機(jī)的氣動(dòng)參數(shù)產(chǎn)生很大影響,根據(jù)機(jī)翼發(fā)生故障的特點(diǎn),將機(jī)翼故障分為邊緣損傷、后端損傷和翼面穿洞3種.邊緣損傷就是機(jī)翼沿著翼展方向斷裂,后端損傷即為操縱面損傷,翼面穿洞就是機(jī)翼被擊穿,3種故障類(lèi)型可以對(duì)機(jī)翼的各種故障情況進(jìn)行概括,通過(guò)設(shè)計(jì)機(jī)翼面積的大小和操縱機(jī)構(gòu)的效率來(lái)實(shí)現(xiàn)故障建模,故障模型如圖1所示.
1.1 機(jī)翼故障飛機(jī)
由于機(jī)翼故障將改變飛機(jī)的氣動(dòng)參數(shù),因此選用如下方程表示的飛機(jī)模型進(jìn)行研究[1-2].

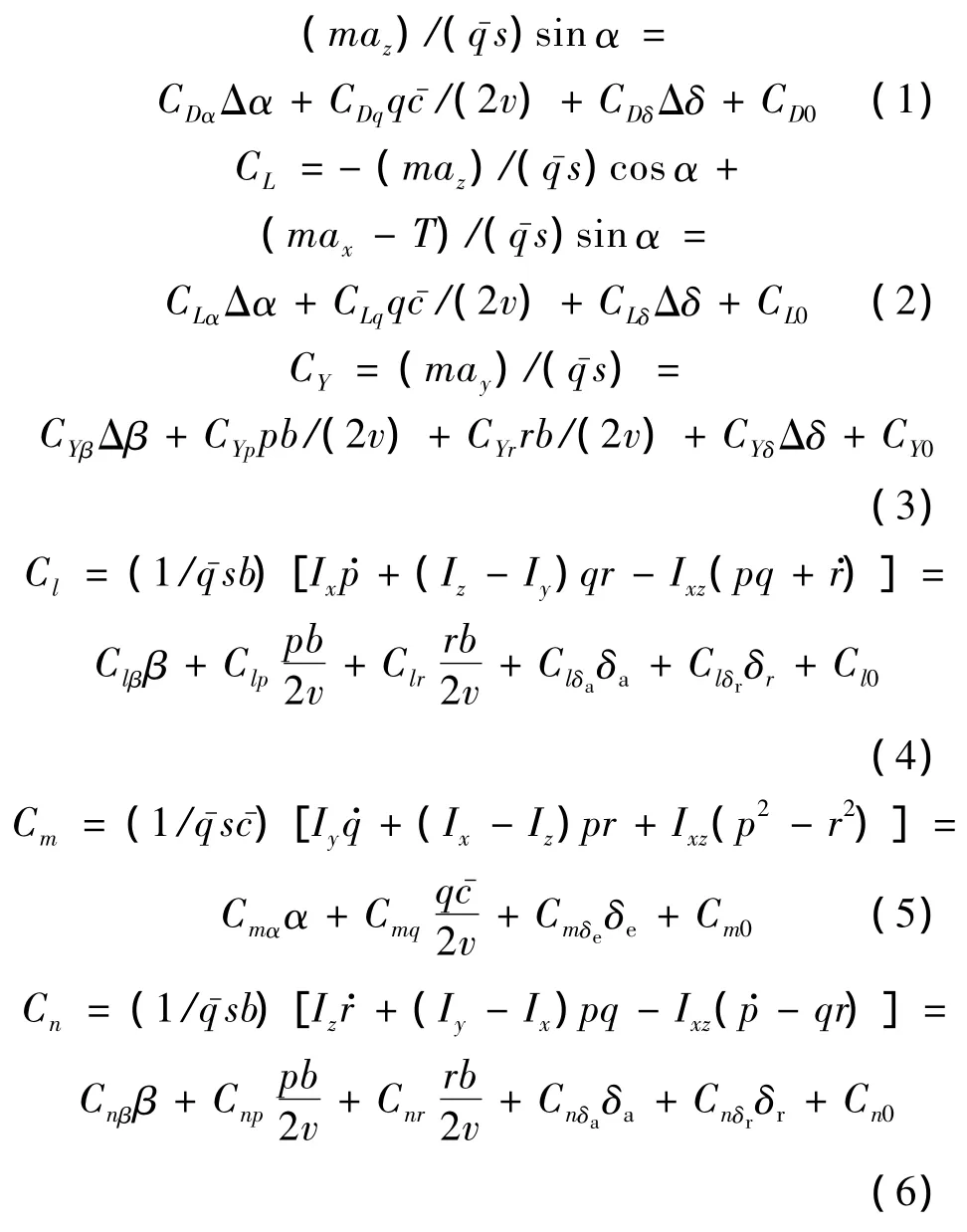
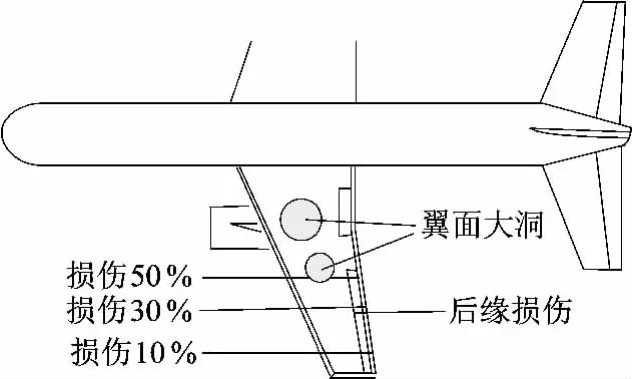
圖1 機(jī)翼故障模型示意圖
其中,CL,CD和cY為空氣動(dòng)力系數(shù);Cl,Cm和cn為3軸力矩系數(shù);δe,δa和δr為升降舵、副翼和方向舵;p,q和r為滾轉(zhuǎn)、俯仰和偏航角速率;T為發(fā)動(dòng)機(jī)推力;,s和b分別為動(dòng)壓、機(jī)翼面積和氣動(dòng)弦長(zhǎng);I·為飛機(jī)轉(zhuǎn)動(dòng)慣量;m為飛機(jī)質(zhì)量;ax,ay和az為加速度;α和β為迎角和側(cè)滑角;C·分別為對(duì)應(yīng)的氣動(dòng)參數(shù).
1.2 算法結(jié)構(gòu)
考慮到飛行控制系統(tǒng)機(jī)翼故障的特點(diǎn),建立實(shí)時(shí)故障診斷與飛行包線(xiàn)估算策略如圖2所示,實(shí)時(shí)飛行包線(xiàn)估算算法基本步驟如下.
1)故障建模.根據(jù)機(jī)翼氣動(dòng)力學(xué)特點(diǎn),建立機(jī)翼故障時(shí)飛機(jī)模型;
2)參數(shù)辨識(shí).使用最小而成算法對(duì)機(jī)翼故障引起的飛機(jī)氣動(dòng)參數(shù)進(jìn)行實(shí)時(shí)辨識(shí);
3)實(shí)時(shí)故障診斷.將辨識(shí)算法的實(shí)時(shí)辨識(shí)結(jié)果與對(duì)應(yīng)的實(shí)際氣動(dòng)參數(shù)進(jìn)行殘差計(jì)算,根據(jù)設(shè)定的閾值進(jìn)行實(shí)時(shí)故障診斷,并且估計(jì)故障的大小和類(lèi)型;
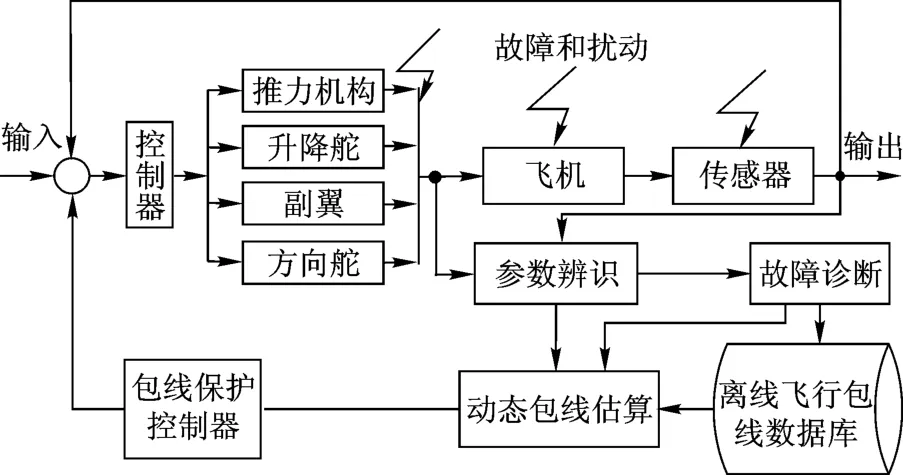
圖2 系統(tǒng)原理結(jié)構(gòu)圖
4)飛行包線(xiàn)在線(xiàn)估算.基于辨識(shí)的氣動(dòng)參數(shù),根據(jù)飛機(jī)平飛性能,進(jìn)行飛行包線(xiàn)的在線(xiàn)計(jì)算;
5)飛行包線(xiàn)數(shù)據(jù)庫(kù).在離線(xiàn)情況下,根據(jù)設(shè)定的故障,分別對(duì)系統(tǒng)進(jìn)行配平計(jì)算,在每個(gè)配平點(diǎn)進(jìn)行飛行包線(xiàn)估算,根據(jù)不同故障情況下的飛行包線(xiàn)計(jì)算結(jié)果建立離線(xiàn)飛行包線(xiàn)數(shù)據(jù)庫(kù),根據(jù)故障診斷結(jié)果實(shí)時(shí)調(diào)用包線(xiàn)庫(kù)中的數(shù)據(jù),形成當(dāng)前時(shí)刻的飛行包線(xiàn).
2 動(dòng)態(tài)包線(xiàn)估算方法
2.1 參數(shù)估計(jì)與故障診斷
一旦機(jī)翼發(fā)生故障后,飛機(jī)的氣動(dòng)參數(shù)就會(huì)發(fā)生相應(yīng)的變化,進(jìn)而影響飛機(jī)的動(dòng)力學(xué)特性.根據(jù)參數(shù)估計(jì)的定義和特點(diǎn)[10-11],對(duì)于用空氣動(dòng)力學(xué)方程表示的飛機(jī)模型,應(yīng)用最小二乘參數(shù)估計(jì)方法可以表示如下:

其中,ξ為估計(jì)誤差.上式的其余參數(shù)可以根據(jù)具體問(wèn)題描述.
考慮到飛行控制系統(tǒng)的特點(diǎn),由于系統(tǒng)參數(shù)變化范圍較大,因此采用改進(jìn)的加權(quán)遞推最小二乘算法進(jìn)行系統(tǒng)的參數(shù)估計(jì)[4-6],其結(jié)構(gòu)如下:
舵面故障時(shí)飛機(jī)的輸出信號(hào)可通過(guò)機(jī)載傳感器測(cè)量獲得,分別對(duì)相關(guān)的氣動(dòng)導(dǎo)數(shù)進(jìn)行在線(xiàn)辨識(shí).辨識(shí)模型為
將上式配置成標(biāo)準(zhǔn)的最小二乘的形式如下:

其中,φT(k)為測(cè)量量;θ為俯仰角速率;ξ(k)為測(cè)量噪聲;飛機(jī)本體氣動(dòng)大導(dǎo)數(shù)可通過(guò)式(5-14)計(jì)算得到;α,q,v和δe通過(guò)機(jī)載傳感器測(cè)量得到.
基于上述辨識(shí)算法,根據(jù)飛機(jī)非線(xiàn)性仿真模型,進(jìn)行在線(xiàn)參數(shù)辨識(shí).在算法運(yùn)行中,激勵(lì)信號(hào)采用疊加的方式,在飛機(jī)操縱面操縱信號(hào)上疊加較小的激勵(lì)信號(hào),疊加的準(zhǔn)則是以不影響舵面的正常操縱為佳.
故障診斷采用成熟技術(shù),即利用辨識(shí)結(jié)果和實(shí)際風(fēng)洞測(cè)試的氣動(dòng)參數(shù)進(jìn)行殘差計(jì)算,根據(jù)預(yù)先設(shè)定的判斷閾值進(jìn)行判斷,同時(shí)通過(guò)計(jì)算操縱面的故障系數(shù),定位故障的類(lèi)型和大小.
本文殘差分析決策過(guò)程采用閾值邏輯方式,閾值檢測(cè)門(mén)限的設(shè)計(jì)準(zhǔn)則為:根據(jù)辨識(shí)誤差和噪聲標(biāo)準(zhǔn)偏差的大小來(lái)確定閾值,具體表達(dá)式為

其中,σ為噪聲標(biāo)準(zhǔn)偏差;ε為辨識(shí)誤差.
為了準(zhǔn)確診斷故障發(fā)生的大小,采用計(jì)算舵面損失效率的方法進(jìn)行分析,定義舵面的故障損失率為
實(shí)時(shí)故障診斷方法為:利用辨識(shí)算法的估計(jì)值與氣動(dòng)參數(shù)的實(shí)際值進(jìn)行比較,從而生成殘差r(k),根據(jù)設(shè)定的殘差閾值檢測(cè)門(mén)限判斷系統(tǒng)是否發(fā)生故障;若判斷發(fā)生故障,則根據(jù)舵面損失效率進(jìn)行故障的精確定位.
2.2 基本飛行包線(xiàn)
飛機(jī)的平飛包線(xiàn)是指在高度和速度平面上,用最大、最小平飛飛行速度和升限隨著飛行高度變化繪出的曲線(xiàn),通常情況下飛機(jī)在安全飛行包線(xiàn)內(nèi)飛行,當(dāng)機(jī)翼發(fā)生故障時(shí),飛機(jī)安全飛行包線(xiàn)縮小.根據(jù)上文的計(jì)算結(jié)果,可以估算故障時(shí)后的飛行包線(xiàn),在飛機(jī)所受重力和飛行高度給定時(shí),最大平飛速度和最小平飛速度求解算法如下:
根據(jù)飛機(jī)平飛的力學(xué)特點(diǎn),平飛最大速度為

其中,ρ(H)為空氣密度(與高度有關(guān));Cxmin為阻力系數(shù);Tmax為可用推力.機(jī)翼故障將影響Cxmin和s,從而影響vmax,使得飛行包線(xiàn)縮小.
平飛最小速度為

其中,Czmax為升力系數(shù);G為飛機(jī)的重量.機(jī)翼故障時(shí)將影響 Czmax和s,從而影響 vmin,使得飛行包線(xiàn)縮小.
升限是指飛機(jī)以特定的重量和給定發(fā)動(dòng)機(jī)工作狀態(tài)保持等速直線(xiàn)平飛的最大高度,基本計(jì)算公式為

其中,vz為飛機(jī)最大上升率;K為升阻比.升限是飛機(jī)最大上升率為零或者最大剩余推力為零時(shí)的飛行高度,實(shí)際中根據(jù)具體機(jī)型定義最大上升率所對(duì)應(yīng)的升限.根據(jù)升限定義,機(jī)翼故障將影響升限,使得飛行包線(xiàn)變化.
上述方法可以計(jì)算當(dāng)前時(shí)刻的飛行包線(xiàn)邊界值,如果要得到全飛行包線(xiàn),則必須建立數(shù)據(jù)庫(kù),將故障對(duì)飛機(jī)的影響擴(kuò)展到整個(gè)包線(xiàn)中,從而得到故障時(shí)的全飛行包線(xiàn).
2.3 包線(xiàn)數(shù)據(jù)庫(kù)
在上文采用實(shí)時(shí)參數(shù)估計(jì)方法估算飛行包線(xiàn)時(shí),僅僅得到當(dāng)前故障時(shí)刻的最大最小速度和升限,不能描述此刻飛機(jī)的飛行包線(xiàn),所以還必須計(jì)算故障時(shí)刻飛機(jī)在除當(dāng)前狀態(tài)以外的飛行包線(xiàn).為了解決上述問(wèn)題,本文應(yīng)用離線(xiàn)包線(xiàn)數(shù)據(jù)庫(kù)的形式進(jìn)行計(jì)算,根據(jù)機(jī)翼故障對(duì)飛行動(dòng)力學(xué)參數(shù)的影響,計(jì)算各種故障時(shí)飛機(jī)的包線(xiàn),建立故障包線(xiàn)數(shù)據(jù)庫(kù),當(dāng)系統(tǒng)檢測(cè)到當(dāng)前故障發(fā)生時(shí),實(shí)時(shí)顯現(xiàn)當(dāng)前飛機(jī)能夠達(dá)到的最大最小速度和升限,并調(diào)用數(shù)據(jù)庫(kù)給出當(dāng)前時(shí)刻的飛行包線(xiàn).
飛機(jī)方程可以寫(xiě)成非線(xiàn)性狀態(tài)方程的形式:

其中,X為系統(tǒng)狀向量;U為控制輸入向量;f為非線(xiàn)性向量函數(shù).將滿(mǎn)足或者U為常數(shù)且的解(Xe,Ue)稱(chēng)為平衡點(diǎn).
飛機(jī)的配平,就是滿(mǎn)足初始值以及約束限制的最優(yōu)化問(wèn)題,假設(shè)飛機(jī)作平直飛行,配平的過(guò)程具體描述如下.
飛機(jī)水平飛行時(shí)的配平如下.
約束條件:
平飛條件:

基本配平控制參數(shù)(平衡點(diǎn)的解):

優(yōu)化目標(biāo)函數(shù):

其中,A~I(xiàn)為優(yōu)化參數(shù);Dr為阻力;L為升力;T為沿著機(jī)體的推力;φ,ψ分別為滾轉(zhuǎn)角和偏航角;h為高度;V為飛行速度.
當(dāng)系統(tǒng)發(fā)生過(guò)故障時(shí),應(yīng)快速進(jìn)行平衡點(diǎn)的優(yōu)化求解,同時(shí)動(dòng)態(tài)的調(diào)節(jié)配平控制參數(shù)的范圍,優(yōu)化求解可以采用所有最優(yōu)化求解方法,常用的方式是直接搜索方法和梯度下降方法,這兩種方法都屬于成熟算法,在此不作過(guò)多地描述.
當(dāng)機(jī)翼發(fā)生故障時(shí),在每一個(gè)指定的高度和速度配平飛機(jī),就會(huì)得到一組不同的阻力和升力系數(shù).根據(jù)式(7)~式(9),就可以估算此時(shí)的最大最小速度和升限.根據(jù)一系列這樣的估算結(jié)果就會(huì)得到此種故障情況下的飛行包線(xiàn),進(jìn)而得到各種故障情況下的飛行包線(xiàn)數(shù)據(jù)庫(kù).
3 仿真分析
為了驗(yàn)證算法的有效性,進(jìn)行仿真分析研究.在仿真實(shí)驗(yàn)中,飛行仿真條件h為0~12 km,V范圍在60~185 m/s,采樣周期為s,仿真時(shí)間為2 s.根據(jù)本文內(nèi)容,進(jìn)行飛機(jī)參數(shù)辨識(shí)和飛行包線(xiàn)參數(shù)計(jì)算.
根據(jù)本文提出的方法,設(shè)置機(jī)翼?yè)p傷50%故障,進(jìn)行參數(shù)辨識(shí)結(jié)果如圖3所示,故障診斷結(jié)果如圖4所示,故障情況下的飛行包線(xiàn)如圖5所示.根據(jù)本文提出的方法進(jìn)行仿真分析,可以得出如下結(jié)論:機(jī)翼?yè)p傷將會(huì)影響飛行動(dòng)力學(xué)參數(shù),進(jìn)而影響飛機(jī)的飛行包線(xiàn);對(duì)于平飛狀態(tài)由圖2可以看出,辨識(shí)算法很快收斂,而且精度較高,通過(guò)將升力和阻力系數(shù)產(chǎn)生的殘差進(jìn)行加權(quán)平均,可以看出在1s時(shí)對(duì)系統(tǒng)注入故障,殘差立刻超出設(shè)定的閾值,可很快診斷出故障,同時(shí)調(diào)用包線(xiàn)數(shù)據(jù)庫(kù),顯示當(dāng)前的平飛包線(xiàn).
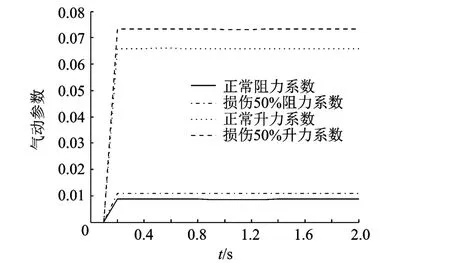
圖3 機(jī)翼?yè)p傷50%時(shí)升力和阻力系數(shù)辨識(shí)結(jié)果
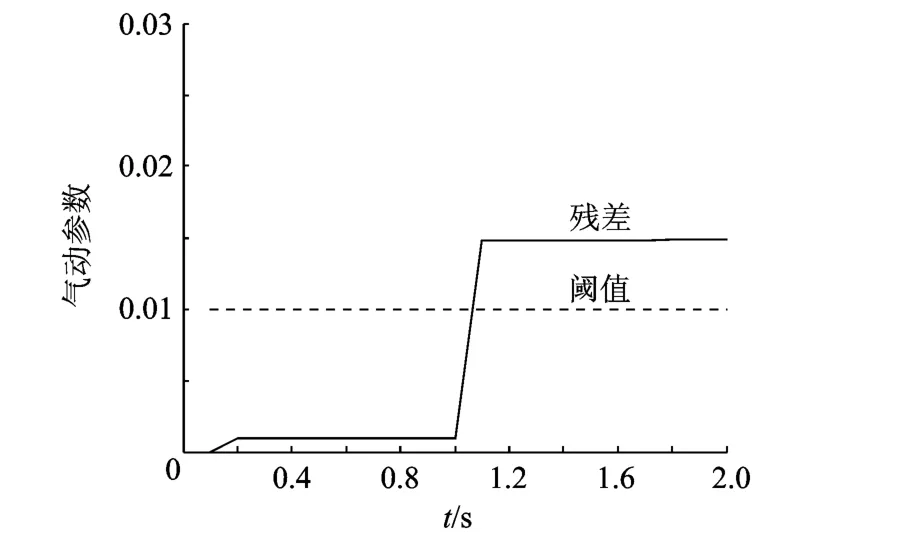
圖4 機(jī)翼?yè)p傷50%時(shí)故障診斷結(jié)果
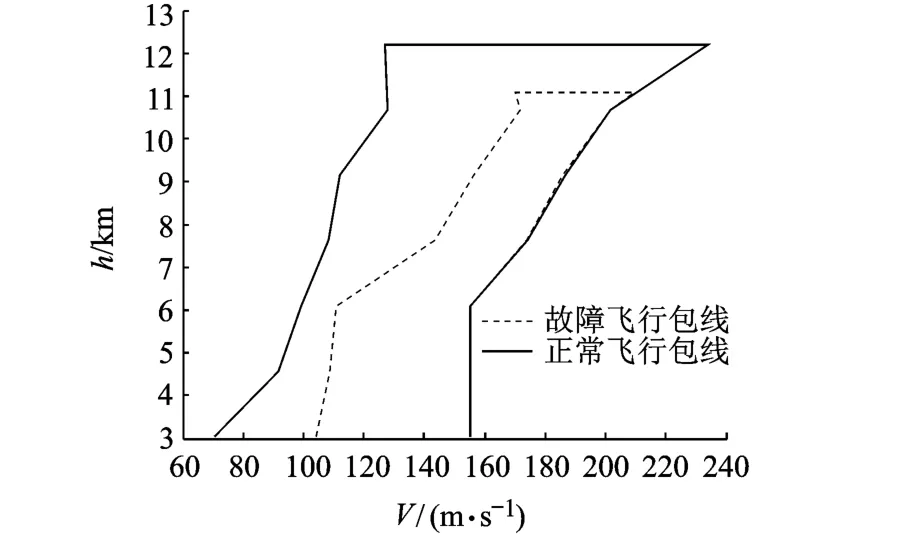
圖5 機(jī)翼?yè)p傷50%時(shí)飛行包線(xiàn)估算結(jié)果
4 結(jié)論
本文提出了一種飛機(jī)機(jī)翼?yè)p傷故障時(shí)飛行包線(xiàn)的估算方法,建立了飛機(jī)的全量六自由度非線(xiàn)性方程與故障參數(shù)模型,應(yīng)用參數(shù)辨識(shí)方法進(jìn)行啟動(dòng)參數(shù)辨識(shí)與故障殘差生成,應(yīng)用辨識(shí)結(jié)果實(shí)時(shí)估算飛行包線(xiàn),并且根據(jù)離線(xiàn)數(shù)據(jù)庫(kù)進(jìn)行飛行包線(xiàn)修正.本文的研究為飛行控制系統(tǒng)故障診斷與重構(gòu)控制拓寬了研究思路.
References)
[1]Bacon B J,Gregory I M.General equations of motion for a damaged asymmetric aircraft[C]//AIAA Atmospheric Flight Mechanics Conference and Exhibit.Hilton Head,South Carolina:[s.n.],2007:1-13
[2]Shah G H.Aerodynamic effects and modeling of damage to transport aircraft[C]//AIAA Atmospheric Flight Mechanics Conference and Exhibit.Honolulu,Hawai:[s.n.],2008:1-13
[3]Urnes J M,Reichenbach E Y Sr,Smith T A.Dynamic flight envelope assessment and prediction[C]//AIAA Guidance,Navigation and Control Conference and Exhibit.Honolulu,Hawaii:[s.n.],2008:1-10
[4]Tang Liang,Roemer M,Bharadwaj S.An integrated health assessment and fault contingency management system for aircraft[C]//AIAA Guidance,Navigation and Control Conference and Exhibit.Honolulu,Hawaii:[s.n.],2008:1-9
[5]Tang Liang,Roemer M,Ge Jianhua.Methodologies for adaptive flight envelope estimation and protection[C]//AIAA Guidance,Navigation,and Control Conference.Chicago,Illinois:[s.n.],2009:1-14
[6]Goman M G,Khramtsovsky A V,Kolesnikov E N.Evaluation of aircraft performance and maneuverability by computation of attainable equilibrium sets[J].Journal of Guidance,Control,and Dynamics,2008,31(2):329-339
[7]Pandita R,Chakraborty A,Seiler P.Reachability and region of attraction analysis applied to GTM dynamic flight envelope assessment[C]//AIAA Guidance,Navigation,and Control Conference.Chicago,Illinois:[s.n.],2009:1-21
[8]Keller1 J D,McKillip R M,JrKim S.Aircraft flight envelope determination using upset detection and physical modeling methods[C]//AIAA Guidance,Navigation,and Control Conference.Chicago,Illinois:[s.n.],2009,1-21
[9]Moncayo H,Perhinschi M G,Davis J.Artificial-immune-systembased aircraft failure evaluation over extended flight envelope[J].Journal of Guidance,Control,and Dynamics,2011,34(4):989-1002
[10]Morelli E A,Smith M S.Real-time dynamic modeling-data information requirements and flight test results[C]//AIAA Atmospheric Flight Mechanics Conference and Exhibit.2008
[11]黃成濤,王立新.多操縱面飛翼構(gòu)型飛機(jī)舵面故障在線(xiàn)診斷方法[J].航空學(xué)報(bào),2011,32(1):58-66
Huang Chengtao,Wang Lixin.On-line fault diagnosis for control surface of multi-control effector flying wings[J].Acta Aeronautica et Astronautica Sinica,2011,32(1):58-66(in Chinese)
[12]方振平.飛機(jī)飛行動(dòng)力學(xué)[M].北京:北京航空航天大學(xué)出版社,2008:25-45
Fang Zhenping.Aircraft flight dynamic[M].Beijing:Beijing U-niversity of Aeronautics and Astronautics Press,2008:25-45(in Chinese)
猜你喜歡
環(huán)球時(shí)報(bào)(2022-05-30)2022-05-30 15:16:57
汽車(chē)維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
當(dāng)代陜西(2019年11期)2019-06-24 03:40:28
作文周刊·小學(xué)一年級(jí)版(2017年9期)2017-06-20 00:19:33
小學(xué)生導(dǎo)刊(低年級(jí))(2016年8期)2016-09-24 22:09:04
汽車(chē)維護(hù)與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年10期)2015-12-28 07:43:58
汽車(chē)維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車(chē)維護(hù)與修理(2015年2期)2015-02-28 12:15:39
振動(dòng)、測(cè)試與診斷(2014年5期)2014-03-01 01:14:21