基于故障樹和快照技術(shù)的無人機特情訓(xùn)練方法
2013-11-05 03:04:04蔡志浩王英勛陳立芳
北京航空航天大學學報 2013年11期
林 清 蔡志浩 王英勛 陳立芳
(北京航空航天大學飛行器控制一體化技術(shù)重點實驗室,北京100191)
隨著無人機技術(shù)的崛起和迅猛發(fā)展,國內(nèi)外把研制重點基本上都放在了無人機空中平臺、任務(wù)設(shè)備及飛行控制軟硬件的性能和可靠性上,這固然對提高飛行安全可靠性十分重要,但在如何提高操作手在常規(guī)和故障情況下完成任務(wù)方面,其發(fā)展一直相對滯后.
無人機特情訓(xùn)練系統(tǒng)的主要功能就是對無人機系統(tǒng)操作手進行常規(guī)和特情飛行訓(xùn)練,提高操作手及時發(fā)現(xiàn)特情、妥善地處置特情并完成飛行任務(wù)的能力[1].本文針對傳統(tǒng)無人機特情訓(xùn)練故障覆蓋率低、主次故障不明確、訓(xùn)練效率低、通用性差等不足,提出了一種基于故障樹遍歷分析和快照技術(shù)的無人機模擬訓(xùn)練方法,并設(shè)計了一種基于Matlab RTW(Real-Time Workshop)/Visual C++/Vega Prime環(huán)境開發(fā)的通用化無人機特情訓(xùn)練系統(tǒng).該方法和系統(tǒng)在某型無人機的特情訓(xùn)練上得到了成功應(yīng)用.
1 訓(xùn)練方案分析
本文以某型無人機的特情訓(xùn)練系統(tǒng)作為研究案例,利用故障樹理論和快照技術(shù)對復(fù)雜無人機系統(tǒng)的特情訓(xùn)練方案進行了研究.
分析復(fù)雜無人機系統(tǒng)特情訓(xùn)練的特點:①無人機系統(tǒng)復(fù)雜,存在著多個子系統(tǒng),而任何一處故障都會導(dǎo)致無人機進入特情狀態(tài),傳統(tǒng)的無人機訓(xùn)練故障覆蓋率低;②在工程實際中,由于技術(shù)和其他客觀因素,某些故障發(fā)生的概率更大,應(yīng)著重予以訓(xùn)練,而傳統(tǒng)的無人機特情訓(xùn)練針對性不足;③特情訓(xùn)練中訓(xùn)練階段耦合嚴重,每輪訓(xùn)練必須合理安排特情訓(xùn)練用例,才能保證不同階段特情訓(xùn)練的合理性和連續(xù)性;④由于特情訓(xùn)練自身特點,無人機處于非常規(guī)狀態(tài),常伴有若干處故障或處于惡劣復(fù)雜的大氣環(huán)境中,無人機極易發(fā)生事故,導(dǎo)致該輪訓(xùn)練的中斷.如果每次都進行一個完整的無人機任務(wù)包線飛行,就面臨總的訓(xùn)練時間長,但是訓(xùn)練效率低下的問題.
針對上述分析,為了解決特點①和②所述的特情訓(xùn)練故障覆蓋率低和重點不突出的問題,本方案采用了故障樹分析(FTA,F(xiàn)ault Tree Analysis)法來分析,遍歷分析無人機可能存在的各種故障,進行完備的模擬訓(xùn)練,同時也找出導(dǎo)致無人機系統(tǒng)特情的主要因素,并在特情訓(xùn)練時著重訓(xùn)練操作手對此種特情的感知和處置能力.在故障遍歷和重點故障明確的基礎(chǔ)上,本文采用了基于訓(xùn)練系統(tǒng)快照技術(shù)的方法,旨在解決特點③和④所述的訓(xùn)練階段耦合和任務(wù)包線重復(fù)的問題.
2 基于故障樹的無人機系統(tǒng)故障分析
故障樹分析作為可靠性和安全分析的一種技術(shù),是建立在運籌學和系統(tǒng)可靠性基礎(chǔ)上的一種符號邏輯分析方法,具有思路清晰、邏輯性強的特點[2].通常故障樹圖能夠很容易地轉(zhuǎn)化為可靠性框圖,從而用可靠度公式來包括因時間而變化的分布,因此它既可以做定性分析,也可以進行定量分析[3].
本文主要是從故障樹分析角度對無人機任務(wù)周期內(nèi)發(fā)生的特情進行分析研究,通過遍歷找出導(dǎo)致無人機出現(xiàn)特情的各種因素,并區(qū)分主次因素,提出相應(yīng)的模擬訓(xùn)練方式,提高無人機操作手的特情處置能力.故障樹是把系統(tǒng)的失效或故障狀態(tài)作為頂事件,找出導(dǎo)致頂事件發(fā)生的所有可能直接原因,即中間事件.再追蹤找出導(dǎo)致每個中間事件發(fā)生的所有可能原因,最后追蹤到每一種基本原因為止,即底事件[4-5].
2.1 故障樹的建立
無人機系統(tǒng)的特情故障樹如圖1所示.樹中各符號的含義如下:A為無人機特情;B1為傳感器故障;C1為大氣數(shù)據(jù)計算機故障;D1為大氣高度故障;D2為大氣馬赫數(shù)故障;D3為大氣總壓故障;D4為大氣靜壓故障;D5為大氣表速故障;D6為大氣升降速率故障;D7為迎角傳感器故障;D8為側(cè)滑角傳感器故障;C2為GPS故障;D9為GPS高度故障;D10為GPS升降速率故障;D11為GPS位置信息失效;D12為GPS速度信息失效;C3為慣導(dǎo)故障;D13為慣導(dǎo)縱向過載故障;D14為慣導(dǎo)側(cè)向過載故障;D15為慣導(dǎo)法向過載故障;D16為慣導(dǎo)縱向速度故障;D17為慣導(dǎo)側(cè)向速度故障;D18為慣導(dǎo)法向速度故障;D19為慣導(dǎo)滾裝角速率故障;D20為慣導(dǎo)俯仰角速率故障;D21為慣導(dǎo)偏航角速率故障;D22為慣導(dǎo)地速故障;B2為飛控計算機故障;E1為飛控計算機一次故障;E2為飛控計算機二次故障;E3為飛控計算機失效;B3為作動器故障;E4為液壓系統(tǒng)1故障;E5為液壓系統(tǒng)2故障;E6為左內(nèi)側(cè)舵面故障;E7為右內(nèi)側(cè)舵面故障;E8為左中側(cè)舵面故障;E9為右中側(cè)舵面故障;E10為左外側(cè)上舵面故障;E11為左外側(cè)下舵面故障;E12為右外側(cè)上舵面故障;E13為右外側(cè)下舵面故障;E14為前輪承載故障;E15為右主輪承載故障;E16為左主輪承載故障;E17為主剎車故障;E18為備份剎車故障;B4為機電系統(tǒng)故障;F1為左發(fā)電機故障;F2為右發(fā)電機故障;F3為EPU故障;B5為動力系統(tǒng)故障;F4為供油總管不增壓;F5為余油400;F6為左供油泵故障;F7為右供油泵故障;F8為油門故障;F9為發(fā)動機備份故障;F10為發(fā)動機喘振故障;F11為發(fā)動機防冰故障;F12為發(fā)動機防喘故障;F13為發(fā)動機超轉(zhuǎn)故障;F14為發(fā)動機超溫故障;F15為發(fā)動機滑油故障;F16為發(fā)動機監(jiān)控故障;F17為發(fā)動機空中停車故障;F18為發(fā)動機計算機1故障;F19為發(fā)動機計算機2故障;B6為數(shù)據(jù)鏈故障;G1為數(shù)據(jù)鏈中斷;G2為數(shù)據(jù)鏈延遲.
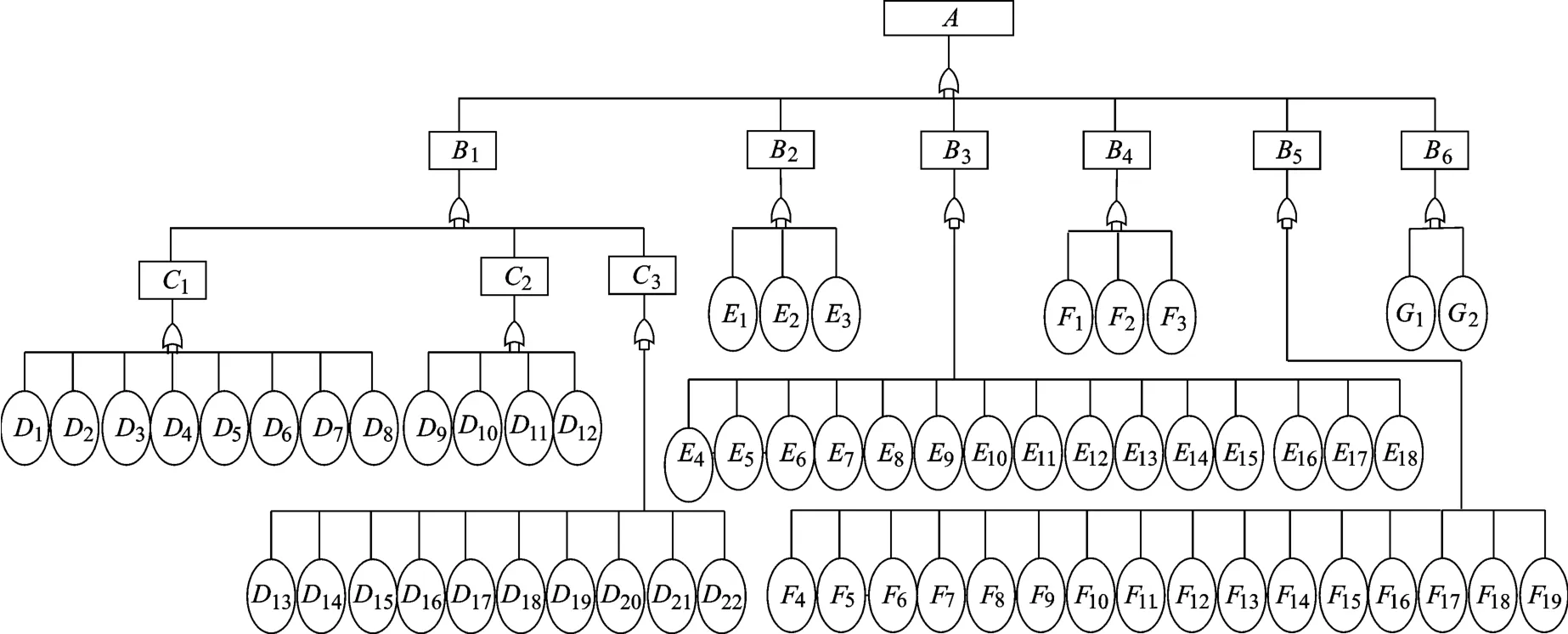
圖1 無人機系統(tǒng)的特情故障樹圖
2.2 故障樹分析
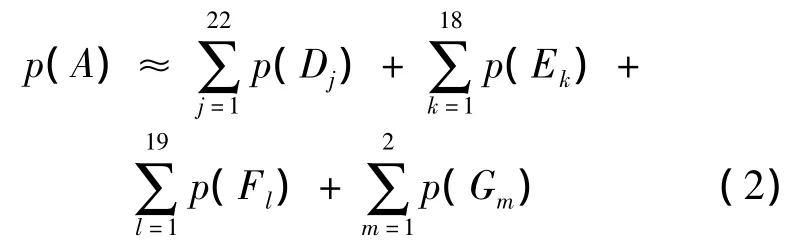
將故障樹圖轉(zhuǎn)化為等效的布爾代數(shù)方程[3]:
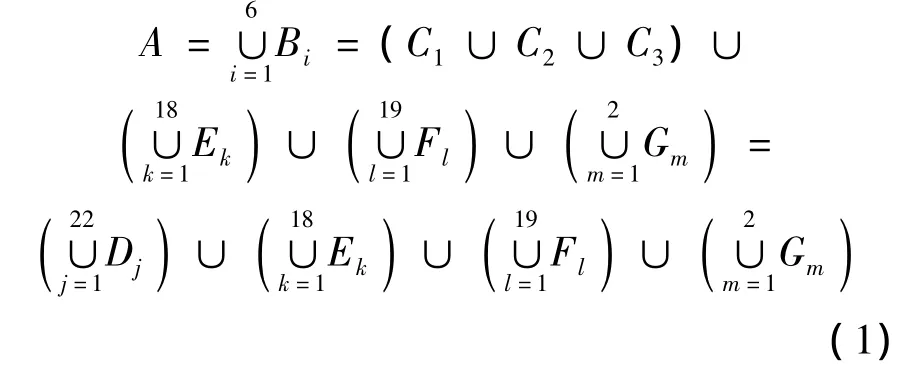
由式(1)可知,故障樹由61個單階最小割集組成,假設(shè)單階最小割集的發(fā)生概率為p(Di),則頂事件的發(fā)生概率為
工程實踐表明,從可靠性、安全性角度來看,引起無人機系統(tǒng)特情的原因很多,但對大多數(shù)無人機飛行故障進行對比分析表明,發(fā)動機系統(tǒng)故障(F4~F19)、作動器故障(E4~E18)、慣導(dǎo)故障(D13~D22)和GPS故障(D9~D12)發(fā)生的概率更大,是無人機系統(tǒng)出現(xiàn)特情的主要原因,應(yīng)該在任務(wù)包線內(nèi)著重進行單項訓(xùn)練和組合訓(xùn)練,此外數(shù)據(jù)鏈路延遲(G12)作為無人機系統(tǒng)特有的問題,在訓(xùn)練中應(yīng)予以重視.
3 基于訓(xùn)練系統(tǒng)快照技術(shù)的訓(xùn)練解耦
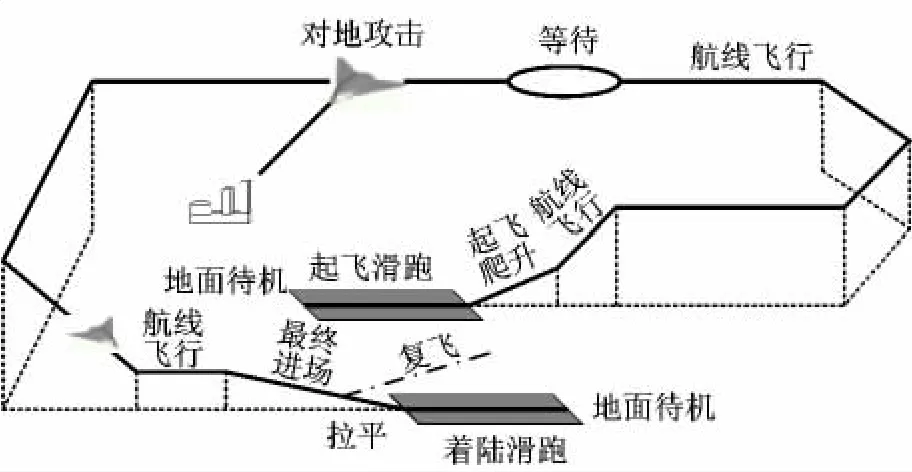
圖2 樣例無人機的任務(wù)包線
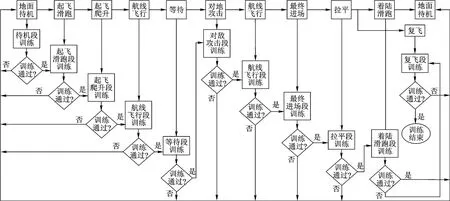
圖3 傳統(tǒng)無人機訓(xùn)練系統(tǒng)流程
如果將無人機的飛行過程簡化為11個階段[6-7],如圖2所示.傳統(tǒng)的無人機訓(xùn)練方法可以用圖3表示,可見訓(xùn)練階段之間存在著強烈的耦合,一個階段的特情訓(xùn)練之后,無人機可能已經(jīng)離開了正常的任務(wù)包線,必須由教練員進行較長時間的人工糾正才能回到正常的飛行階段,進行下一階段的訓(xùn)練;同時,由于特情訓(xùn)練的特殊性,處于特情狀態(tài)的無人機的可控性能大大降低,一旦某個階段的訓(xùn)練失敗導(dǎo)致無人機的墜毀,需重復(fù)整個任務(wù)包線.以上兩點都將導(dǎo)致訓(xùn)練的周期變長,效率較低.
基于訓(xùn)練系統(tǒng)快照技術(shù)[7]就是在不影響特情訓(xùn)練的情況下,實時地提取當前的訓(xùn)練狀態(tài)數(shù)據(jù)建立一個快照數(shù)據(jù)庫,針對不同的訓(xùn)練階段時只需要求選擇不同的訓(xùn)練系統(tǒng)快照即可.這樣就實現(xiàn)了訓(xùn)練階段之間的解耦,如圖4所示,每個訓(xùn)練用例只需載入特定階段的訓(xùn)練系統(tǒng)狀態(tài)快照,而無需系統(tǒng)從頭開始,將復(fù)雜的特情訓(xùn)練轉(zhuǎn)化為多個獨立的單項訓(xùn)練,極大地提高了訓(xùn)練的效率.
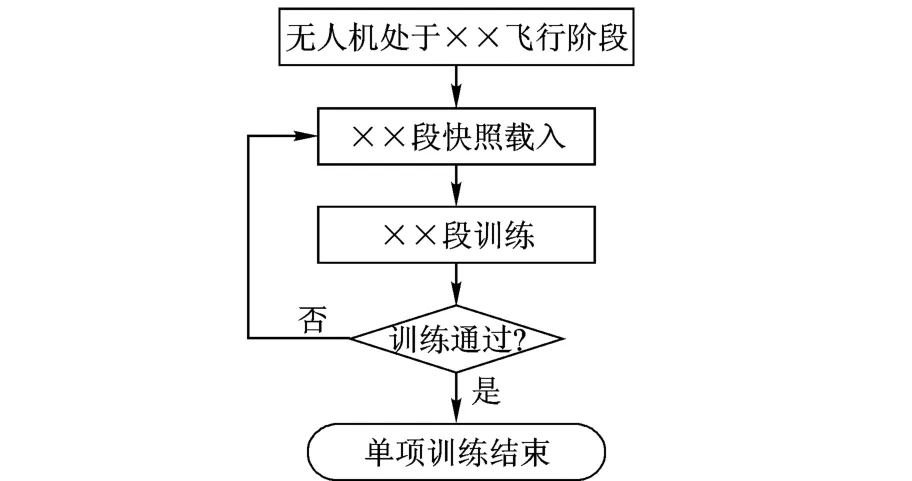
圖4 基于仿真系統(tǒng)快照技術(shù)的無人機特情訓(xùn)練
4 通用化無人機特情訓(xùn)練系統(tǒng)
現(xiàn)有的無人機訓(xùn)練系統(tǒng)都是針對某個特定型號設(shè)計,專用性太強,本文在無人機系統(tǒng)特情故障樹分析和訓(xùn)練系統(tǒng)快照的基礎(chǔ)上,采用了模塊化設(shè)計的思想,設(shè)計了一套通用化的無人機特情訓(xùn)練系統(tǒng),可以通過簡單的模型替換和接口修改實現(xiàn)不同型號無人機的特情訓(xùn)練.
上述的通用化無人機特情訓(xùn)練系統(tǒng)分為3個程序模塊:數(shù)字飛機模塊、教員臺模塊、視景模塊,各個模塊的描述如下.
4.1 數(shù)字飛機模塊
本模塊采用了基于Matlab RTW的自動代碼生成技術(shù)來實現(xiàn)無人機本體動力學仿真、飛管系統(tǒng)仿真、飛機機載系統(tǒng)仿真.
RTW的目標文件創(chuàng)建過程可以劃分為2個階段[8-9]:第1個階段是代碼生成過程;第2個階段是RTW根據(jù)模板聯(lián)編文件生成makefile文件,并以此文件對所生成的代碼進行編譯并最終鏈接為可執(zhí)行程序.為了使自動生成的代碼能應(yīng)用到特情訓(xùn)練系統(tǒng)中,需對所生成的實時代碼進行接口修改、重新編譯及鏈接,最后得到Windows平臺下作為動態(tài)鏈接庫文件的dll,通過Visual Studio每10 ms調(diào)用該dll實現(xiàn)無人機實時仿真.與傳統(tǒng)的手工編寫仿真軟件代碼的方法相比,本方法縮短了系統(tǒng)的研制周期,并且在一定程度上保證了軟件的質(zhì)量可靠性.
4.2 教員臺模塊
本模塊通過ActiveX數(shù)據(jù)對象(ADO,ActiveX Data Objects)與數(shù)據(jù)庫相連,在實現(xiàn)仿真流程控制、管理和監(jiān)控的同時能夠靈活地進行特情系統(tǒng)快照的建立和加載、特情注入、飛行數(shù)據(jù)記錄、回放與分析.
根據(jù)故障樹分析的結(jié)果,教員臺的故障注入界面如圖5所示.

圖5 教員臺的故障注入界面
4.3 視景模塊
本模塊采用 Vega Prime 5.0[10]和Visual Studio 2005實現(xiàn),采用模塊化設(shè)計思想,預(yù)留標準接口并搭建了模型庫和地形庫,可以方便地實現(xiàn)不同型號無人機的視景模擬,并能構(gòu)造連續(xù)的地形、機場、跑道、建筑物、道路及標志性的地形地貌,模擬白天、黃昏、夜間、雨、霧、雪等視覺效果,為操作人員實時地提供逼真的第三視角的模擬視場,為操作人員提供虛擬的視覺效果.系統(tǒng)效果見圖6.

圖6 視景效果圖
5 試驗
某型號無人機系統(tǒng)的特情訓(xùn)練過程中,采用基于故障樹分析和快照技術(shù)前后特情訓(xùn)練的效率、效果和故障覆蓋率情況對比如表1所示.
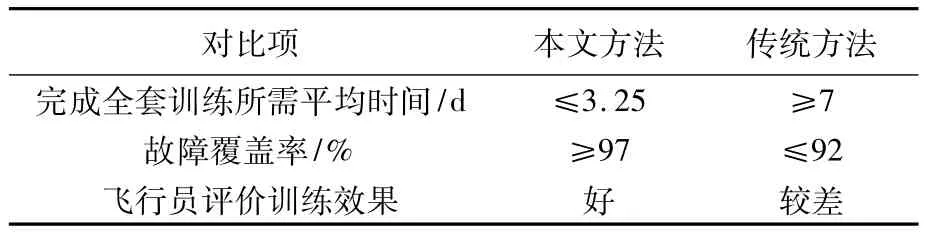
表1 訓(xùn)練效果對比
6 結(jié)束語
本文首次將故障樹分析法和快照技術(shù)應(yīng)用于無人機系統(tǒng)特情訓(xùn)練,以某型無人機為研究對象,設(shè)計了一套通用的無人機特情訓(xùn)練系統(tǒng),并成功應(yīng)用于無人機地面操作手的訓(xùn)練,提高了操作手對無人機特情的及時識別和妥善處置能力,該方法的推廣對提高大型無人機系統(tǒng)的任務(wù)可靠性將起到推動作用.
References)
[1]吳佳楠,王偉.基于任務(wù)設(shè)備模擬的新型無人機訓(xùn)練模擬器研究[J].計算機測量與控制,2011,19(12):3105-3110
Wu Jianan,Wang Wei.Research of a kind of new UAV training simulator based on equipment simulation[J].Computer Measurement and Control,2011,19(12):3105-3110(in Chinese)
[2]潘波,姜同敏.基于故障樹的飛機結(jié)構(gòu)腐蝕損傷模糊綜合評判[J].北京航空航天大學學報,2012,38(1):39-42
Pan Bo,Jiang Tongmin.Fuzzy comprehensive evaluation of corrosion damage of aircraft structures based on fault tree[J].Journal of Beijing University of Aeronautics and Astronautics,2012,38(1):39-42(in Chinese)
[3]潘波,黃領(lǐng)才,姜同敏,等.服役飛機結(jié)構(gòu)件腐蝕失效故障樹分析及改進[J].北京航空航天大學學報,2010,36(3):299-302
Pan Bo,Huang Lingcai,Jiang Tongmin,et al.Fault tree analysis of corrosion failure for aircraft structures and improvements[J].Journal of Beijing University of Aeronautics and Astronautics,2010,36(3):299-302(in Chinese)
[4]Contini S,Cojazzi G G M,Renda G.On the use of non-coherent fault trees in safety and security studies[J].Reliability Engineering and System Safety,2008,93:1886-1895
[5]Shalev D M,Tiran J.Condition-based faulttree analysis(CBFTA):a new method for improved fault tree analysis(FTA),reliability and safety calculations[J].Reliability Engineering&System Safety,2007,92(9):1231-1241
[6]王宏利,肖靜.基于RTW的無人機飛行仿真實現(xiàn)[C]//陳宗基.2012中國導(dǎo)航、制導(dǎo)與控制學術(shù)會議論文集.北京:科學出版社2012:1420-1423
Wang Hongli,Xiao Jing.UAV flight simulation based on RTW[C]//Chen Zongji.Proceedings of the 2012 Chinese Guidance Navigation and Control Conference(CGNCC2012).Beijing:Science Press,2012:1420-1423(in Chinese)
[7]田峰,丁文銳,李紅光,等.一種無人機飛行控制管理軟件回歸測試方法[J].北京航空航天大學學報,2011,37(5):574-578
Tian Feng,Ding Wenrui,Li Hongguang,et al.Regression testing method of UAV flight and management software[J].Journal of Beijing University ofAeronauticsand Astronautics,2011,37(5):574-578(in Chinese)
[8]The MathWorks,Inc.Real-time workshop user's guide,version 8.0[M/OL].Natick:The MathWorks,Inc,2011[2012-05-10].http://www.mathworks.com
[9]The MathWorks,Inc.Simulink coder target language compiler,version 8.0[M/OL].Natick:The MathWorks,Inc,2011[2012-05-10].http://www.mathworks.com
[10]The Presagis USA Inc.Vega prime programmer's guide,version 5.0[M/OL].Montreal:The Presagis Canada Inc,2011[2012-05-10].http://www.presagis.com
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
民用飛機設(shè)計與研究(2020年4期)2021-01-21 09:15:02
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
電子制作(2018年18期)2018-11-14 01:48:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50