基于麥克風陣列系統的聲源定位技術研究現狀
2014-04-29 00:44:03王順利洪強夏長春
電腦迷 2014年11期
王順利 洪強 夏長春
摘 要 麥克風陣列信號處理是數字信號處理領域的一個熱點問題,對麥克風陣列接收到的信息量,根據各個陣列之間信息的相關性,可以使用融合處理的方式實現對參數的估計,這種融合不僅可以在時間域處理,也可以在頻域處理。麥克風陣列信號處理技術能夠在統計意義上得到測量數據,該技術已應用在無線通信,雷達,聲納與工業控制等場合得到了廣泛的應用。
關鍵詞 聲源定位 麥克風陣列 數字信號處理 三維空間 可控波束
中圖分類號:TB51 文獻標識碼:A
1麥克風陣列系統的聲源定位技術研究意義
輸入的信息只有兩個方向難以確定聲源的位置,人類的聽覺系統主要取決于頭和外耳氣壓差聲波實現聲源定位。假使沒有這個壓力差,只能定位在平面上聲源的位置,但就無法知道聲音是從前面,或從后面傳來的。因此,由人的聽覺系統,科技研發人員得到了靈感,使用多個麥克風系統可以實現在三維空間中的聲源位置的定位,麥克風的數量越多,所接收到的信息量也越多。
聲源的聲源定位和聲源增強是實現智能處理的兩個關鍵問題,而聲源定位是實現語音增強的前提和基礎。一個麥克風的信息量較少,使得聲源定位所需的信息缺乏,而麥克風陣列克服了上述缺點,充分利用每個麥克風信號之間的數據相關性,并加以融合,可以實現聲源定位。
麥克風陣列系統已廣泛應用于許多領域的基礎上,一些典型的應用:
(1)視頻會議
傳統的視頻會議和大型會議,如果只在一個固定的位置放置一個麥克風,揚聲器遠離麥克風,語音信號的質量收集很差,為了得到增強的語音信號,有兩種選擇,一種是誰講麥克風傳給誰,這是最常用的方法,其成本低,但使用不方便。另一個方法是對每個人都配置麥克風,這種方法容易在參與者的數量較少的情況下實現,但其成本太高,不太現實。基于麥克風陣列的系統不僅成本適中,安裝方便,使用者還可以自動將提高揚聲器的聲音,和周圍環境的噪聲抑制。
在視頻會議和視頻監控,自動聲源定位系統的麥克風陣列方向擾動攝像頭的熱點區域,以獲得更好的圖像和聲音,大大地節省了人力。
(2)移動電話系統
當車輛在高速運行狀態時,如果用手拿移動電話,可能會導致安全問題,免提電話由此應運而生。然而,當一些人在汽車中高聲談論事情時以及和當車輛高速運行時產生噪聲的情況下,使用免提電話就比較困難。如果駕駛員位置使用麥克風陣列定位,加強在這個位置上的聲音,消除其他方向上的干擾聲音,通話效果就會有明顯改善。
(3)故障診斷
故障診斷的第一步是確定故障的位置,在故障診斷中的聲源定位是一種使用音頻信號來實現無源探測定位的技術。聲源定位系統采用被動方式工作,電磁輻射具有很強的隱蔽性,聲源定位故障檢測是在軍事領域和民用領域得到了廣泛的應用。
2麥克風陣列系統的聲源定位技術的各種算法
(1)可控波束法
可控波束的方法首次應用在雷達,聲納和通信,軍事和經濟領域,在這些應用領域中,聲源模型是遠場模型,目標是得到聲源的方向角。一種最簡單的可控波束的聲源定位方法是基于延遲求和波束形成方法。麥克風的信號傳播延遲的方法,用于麥克風延遲聲源的補償,這些信號通過時間延遲疊加后形成混合信號,每個信號補償后,在時間上基本相同,而疊加信號輸出能量是最大的。對麥克風求產生的信號求和來得到波束,然后通過搜索聲源的位置來引導波束,最大輸出能量的波束點就是聲源位置。
波束形成的基本思想是信號加權后每個數組元素集合的總和,利用麥克風陣列來調整最大輸出功率的權重。在傳統的可控波束的形式中,權值的確定取決于各陣元信號之間的延遲,而相位延遲與時延遲和到達方向有關系,所以它也被稱為延遲求和波束形成器。在現代的波束形成器中,權值可以突破限制,根據調整權值的依據來獲得相應的波速形成器,常用的依據為最小均方誤差準則。一般來說,信號的加權求和過程可以被看作是過濾過程。所以稱這種波束形成為濾波器求和波束形成器。
(2)TDOA算法
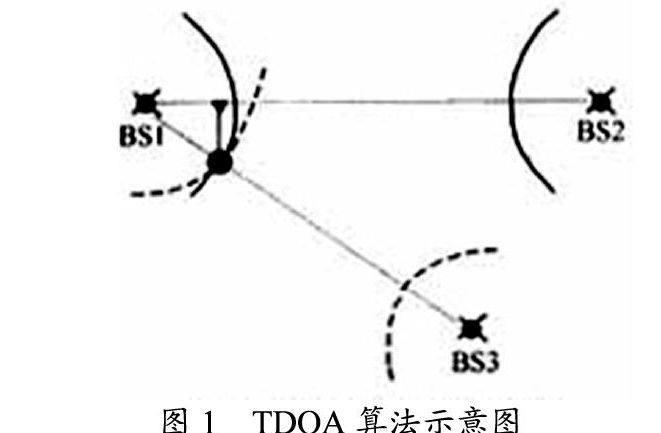
TDOA定位算法是一種對TOA算法的改進版本,他不能直接使用信號來到達時間,必須要與多個基站接收以確定移動站的信號位置,與TOA算法相比,不需要加入專門的時間戳,定位精度提高。2種TDOA值的采集:
第一種形式是移動站到2個基站的時間,使用差值來獲得,此時還需要基站的時間嚴格的同步,但是當基站移動信道特性相似時,可以降低由多徑效應引起的誤差,如圖1所示。
到達時間差的方法分為兩個步驟,首先計算出聲源在每個麥克風的相對時間差,再結合麥克風陣列的物理結構,得到聲源的位置。時延估計中的第一步準確與否直接決定第二步定位精度。
參考文獻
[1] 肖華.麥克風陣列的校正方法研究[D]. 電子科技大學,2008.
[2] 崔瑋瑋.基于麥克風陣列的聲源定位與語音增強方法研究[D]. 清華大學,2009.