智能移動水果采摘機器人的設計
2014-04-29 23:03:06馮光
電腦迷 2014年1期
關鍵詞:機器視覺
馮光


摘 要 設計一種機器人,用來移動水果和采摘水果的智能產物。該機器人由尾端執行器、采摘機械臂、橫向的移動機構、智能移動平臺以及相關的控制系統組成,由C語言程序編寫的控制程序,開發人機能夠相互交流的界面。整個系統工作性能較為穩定,對成熟果實的正確識別率為81.5%,成功采摘率為87.1%,每個水果的采摘耗時平均為9.45s。
關鍵詞 采摘機器人 機器視覺 移動平臺 水果
中圖分類號:TP242 文獻標識碼:A
0前言
歷年來,水果生產中,水果采摘一直是最費力最耗時的環節之一,它所需全部生產過程的大約40%左右的勞動力。為了使更多的果農從復雜的采摘作業中得到充分的解放以及提高果實采摘的效率,一直都有很多國內外的專家以及學者專心投入對采摘機器人的實驗和研究。
1工作原理與總體結構
1.1工作原理
該機器人在果園作業時是這樣實現自主導航的:首先是主體控制器對由雙目攝像機采集的果樹行間的路面圖像進行處理,通過分析得出導航路徑,然后再由串口1收集DGPS位姿信號,將其與視覺導航信息進行融合,進而實現該機器人移動平臺的自主導航。當機器人行進至目標果樹位置時,主控制器將會發出使移動平臺電機停止轉動的指令,然后再通過RS232向采摘機械臂發出控制指令,使機械臂移動到各個圖像采集位姿。當對果樹的圖像采集完成后,主控制器還會對成熟果實進行識別和定位,然后通過RS232向末端執行機構發出指令,末端執行器便抓取果實。采摘完成后,各級機械臂回到導航初始位置,重復執行以上采摘作業。
1.2總體結構
此次設計的機器人是履帶式的,主要由控制系統及其機械執行系統組成。機械執行系統如圖1所示,主要包括橫向滑移機構,末端執行器,采摘機械臂,移動平臺等。控制系統主要包括雙目攝像機,數據采集卡,機械臂控制器,末端采集控制器,運動控制卡,GPS,1394轉換卡,電機驅動器以及各傳感器和各個控制電路等。移動平臺包括固定平臺,機架,履帶式行走裝置等。
2工作主要部件
2.1橫向的滑移機構
在前期的實驗過程中,發現果實的采摘有兩種漏摘現象:(1)當果實與攝像機的距離低于0.85m時,攝像機不能準確的對果實進行立體匹配;(2)當機械臂基坐標系原點與果實距離超過1.75m時,果實將超出機械臂采摘范圍。為此,我們設計了如圖2所示的橫向滑移機構,將機械臂底座固定安裝在滑移機構的滑臺上,使機械臂與果樹之間的距離以及攝像機與果樹間的距離均能方便調節,很好地解決了漏摘的問題。
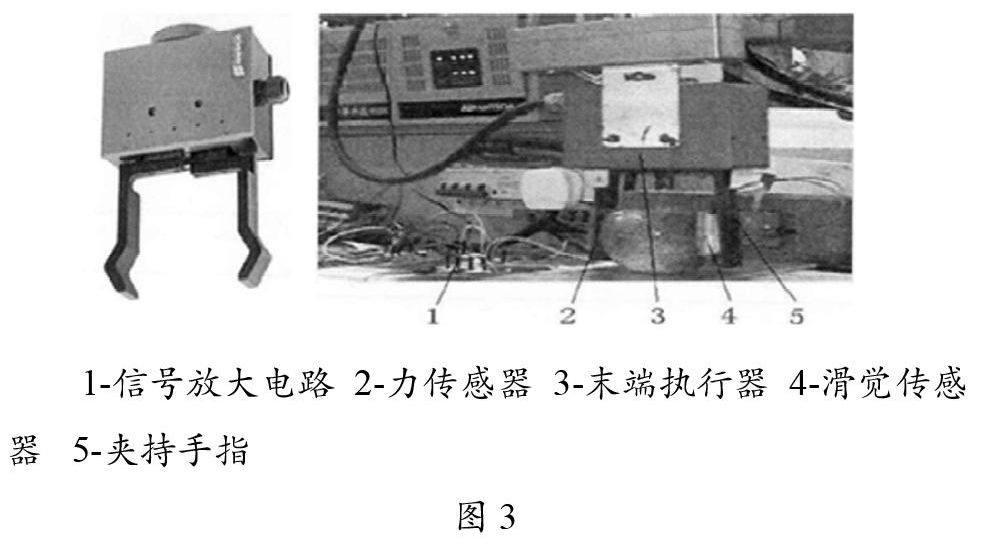
2.2末端執行器與采摘機械臂
末端執行器采用的是由德國SCHUNK公司生產的型號為EVG55HUB100的產品,其結構如圖3所示。該執行器的抓取動作是由滑覺傳感器和力傳感器的信號決定的。
采摘機械臂采用的是由日本安川公司生產的MOTOMAN-SSF2000型的工業機器人。其額度負載為6kg,采摘半徑為1378mm,度2403mm,機械臂底座距離地面的高度為1200mm。
2.3履帶式的移動平臺
為了可以準確獲取障礙物的距離和行駛路徑等信息,此次設計采用了減振性能較好的橡膠履帶。為了避免鋼制驅動輪與橡膠履帶配合造成橡膠履帶磨損過快的缺陷,驅動輪采用了超高分子聚乙烯材料。移動平臺的行走裝置采用了安川電動機來驅動,這種電動機只需改變驅動器設置,便可實現交流與直流間的供電切換,這樣便減少了有些果園沒有三相交流電的使用限制。
3機器的視覺系統
3.1果實的定位與識別
定位系統和果實識別的硬件主要由1394轉換卡,雙目攝像機和主控制器組成。先由攝像機采集果樹圖像,然后通過1394轉換卡將采集到的果樹圖像傳輸到主控制器,在主控制器中采用各種圖像處理算法對果樹圖像進行處理,從而識別出成熟的果實,解算出果實在機械臂基坐標系下的三維坐標。
3.2果實的圖形采集
由于攝像機的視野有限,只采集一幅圖片是不能對整棵果樹進行覆蓋的,所以采集圖像時機械臂需要在多個不同的位姿進行采集。通過實驗表明,大部分果樹需要采集6幅圖片方可覆蓋。系統每采集一幅圖,就會對果實進行識別和定位處理,并且對該圖片中成熟果實的位姿信息進行保存,然后由上位機根據成熟果實的位姿信息對機械臂采摘路徑作出規劃。當一幅圖像中的成熟果實采集完畢后,機械臂自行運動到下一個圖像采集位姿,并重復以上圖片的采集過程,直至6幅圖片中所有被識別的成熟果實采集完畢。
4控制系統的設計
4.1硬件系統的設計
這個采摘機器人的控制系統主要由上、下位機控制器和傳感系統等部分組成,該硬件的結構框圖如圖4所示。
4.2下位機和上位機的控制器
該控制系統采用的是上、下位機兩層結構,下位機控制器包括:末端執行器控制器,機械臂控制器及移動平臺控制器。上位機控制器采用研華IPC610-H型工控機,其主頻為2.66GHZ,CPU為Core2雙核。機械臂控制器由RS232與上位機控制器連接進行通信。末端執行控制器也是如此通信,該控制器用來控制末端執行器手指閉合和張開的位置與速度。移動平臺控制器采用研華PCI1240U,該控制器通過PCI總線與上位機控制器,進行通信,該控制器能控制4個自由度,移動平臺只要其中兩軸即可,其他兩軸可用來作為功能拓展。
4.3傳感器的系統
傳感器系統主要由滑覺傳感器、力傳感器、GPS和雙目攝像機組成。攝像機采用的是Point Grey Research公司的bumblebee2型攝像機,其基線長120mm,焦距為3.8mm。
攝像機通過1394轉接卡與計算機進行數據傳輸。GPS采用JAVAD公司所生產的機器,其接收機天線型號為GPS702-GG。該系統可實現精確測向和定位。滑覺傳感器與力傳感器的型號分別為FSR-406和FSR-402。
4.4軟件的系統
整個控制系統軟件是在VC++6.0中開發完成的,其程序設計流程如圖5所示。
采摘機器人控制系統軟件設計簡述如下:(1)系統設備初始化。(2)主控制器首先通過1394轉接卡采集雙目攝像機所拍攝的路面圖像,通過RS232采集GPS航向信息及位置坐標。然后主控制器對導航圖像進行處理,并提取視覺導航參數。最后主控制器再根據GPS采集位置和航向信息以及坐標導航圖像信息進行決策分析,進而實現移動平臺的自主導航。(3)主控制器通過1394轉接卡采集雙目攝像機拍攝的果樹圖像,對成熟果實進行識別與定位。并將攝像機坐標系下目標果實的三維坐標轉換到采摘機械臂的基坐標系下。再由主控制器根據果實位置坐標對機械臂采摘路徑進行規劃。(4)當機械臂運動到目標姿位后,主控制器通過RS232向末端執行控制器發出指令,是末端執行器抓取果實。(5)重復以上四個步驟直到機械臂采摘范圍內的果實采摘完畢。(6)機械臂回到導航的初始位姿,并重復以上自主導航和自主采摘過程。
5采摘機械臂的路徑規劃
機械臂的路徑規劃是果實采摘的關鍵問題之一。這個智能采摘機器人針對果樹生長狀況及果枝分布的特點,采用了多段路徑規劃來完成了機械臂的運動控制。
如圖6所示,XYZ為機械臂的基坐標系,O為坐標原點,F為果實中心,F? 為果實中心在XOY面內的投影。A、B、C、D分別為采摘機械臂處于不同位姿時其末端執行器的對稱中心點。因為圖像采集位姿在采摘之前就已經給定了,所以B點的坐標是已知的,D點的坐標可由雙目視覺系統求得,故要完成整個路徑規劃,必須求出C點的坐標,設C點與D點之間的距離為L,試驗中確定L的長度為0.5m,由以上已知條件可求得C點的坐標。
雙目攝像機完成圖像采集后,機械臂腰關節旋轉至與Y軸夾角%a 處。。水果采摘時,機械臂在由點FOF?構成的平面內運動,考慮到機械運動的平順性,A到B及B到C之間路徑采用的是PTP圓弧插補方式的運動。C到D之間軌跡采用的是PTP直線插補方式的運動,末端執行器只在FOF?平面上作直線平移,這樣對應果實采摘所需空間變小,末端執行器碰到的樹枝等障礙的幾率變小,從而保證了果實采摘的成功率。果實采摘成功后,先由D回到C,再有C回到果實收集箱的上方,然后末端執行器夾持手指松開,果實下落到收集箱內。
6結論
(1)根據果樹智能化的采摘要求,設計了智能移動水果采摘機器人,該機器人具有結構簡單,動作靈活等優點。(2)在VC++6.0中編寫了智能移動水果采摘機器人系統控制程序,開發了人機交互界面。(3)整個系統將末端執行器,傳感器系統,采摘機械臂,圖像處理算法和移動平臺等部分關鍵技術融合在了一起,實現了末端執行器摘取,機械臂運動,移動平臺導航及水果裝箱等關鍵動作的智能協調控制,從而真正實現了水果采摘的無人化與智能化。
參考文獻
[1] 劉長林,張鐵中,楊麗.果蔬采摘機器人研究進展[J].安徽農業科學,2008,36(13):5394-5397.
[2] 楊文亮.蘋果采摘機器人機械手結構設計與分析[D].江蘇大學,2009.
[3] 劉銳.水果采摘機器人視覺控制及其軌跡規劃研究[D].南京農業大學,2010.
[4] 周俊,張高陽,劉銳,等.基于粒子濾波的蘋果采摘機器人目標姿態估算[J].農業機械報,2011,42(3):161-165.
[5] 安秋.農業機器人視覺導航系統及其光照問題的研究[D].南京農業大學,2008.
[6] 李建平,林妙玲.自動導航技術在農業工程中的應用研究進展[J].農機工程學報,2006,22(9):232-236.
[7] 王友權.自主導航的農用移動平臺的設計與路徑跟蹤設計[D].南京農業大學,2008.
[8] 張智剛.插秧機的GPS自動導航控制系統研究[D].華南農業大學,2008.
猜你喜歡
軟件導刊(2016年11期)2016-12-22 21:52:17
電腦知識與技術(2016年28期)2016-12-21 12:13:14
科技視界(2016年26期)2016-12-17 17:31:58
科技視界(2016年25期)2016-11-25 19:53:52
科技視界(2016年25期)2016-11-25 09:27:34
科教導刊(2016年25期)2016-11-15 17:53:37
軟件工程(2016年8期)2016-10-25 15:55:22
科技視界(2016年20期)2016-09-29 11:11:40
科技視界(2016年6期)2016-07-12 09:12:40
科技視界(2016年15期)2016-06-30 19:03:30