基于三維掃描點云對漸開線斜齒圓柱齒輪的參數提取
2014-05-10 07:47:58王春香石宏民
機床與液壓 2014年23期
王春香,石宏民
(內蒙古科技大學機械工程學院,內蒙古包頭014010)
0 前言
齒輪的測繪和參數反求工作技術性很強,對測繪人員的齒輪設計、加工和檢驗經驗要求高。致使本地區的一些廠礦企業存在由于缺少對于齒輪參數提取方法研究的專業技術人員,在遇到有齒輪產品實物,而無原始設計圖紙的情況下,難以快速、準確地反求出齒輪基本參數和其主要幾何尺寸的問題。為了解決現場存在的類似問題,以來源于某現場的尚未使用的漸開線圓柱斜齒輪產品為對象,基于實物逆向工程技術,研究了其基本參數和主要幾何尺寸的反求方法。目前,關于變位漸開線圓柱直齒輪基本參數的提取方法已經有一定的研究成果[1-2]:文獻[1]基于較高精度量具采用傳統的測繪法和嚙合理論,結合汽車行業標準,反求了進口啟動機驅動用高度變位圓柱漸開線直齒輪的參數。文獻[2]以三坐標機在任意端面測得的少量齒廓線離散測點為依據,通過以三次多項式近似齒廓漸開線及利用測點的齒形誤差的方法擬合出基圓半徑,再以基圓推算模數,進而利用模數、壓力角的組合可能試算模數和壓力角的方法借助計算機編程實現了反求一配對的高度變位直齒圓柱齒輪的參數;并給出了一種實用的“基圓擬合算法”。前者是在齒輪的產出國、行業及用途背景及齒廓線線型已知為漸開線的前提下,易受到人為測量操作以及經驗的影響,而可能使齒輪參數提取的一次精確度不高,后者沒有充分利用數字化檢測的準確、高效和便捷性,以及基圓半徑的擬合及反求計算需要進行底層編程,使反求過程顯得較為復雜、效率不高。本文作者借鑒了文獻[2]中初始基圓半徑的修正方法,以能否反求出基圓半徑來判定齒輪的齒廓線是否為漸開線(不同之處在于初始基圓半徑的選取原則,且文獻[2]中為了用三次多項式擬合曲線,通過坐標轉換到局部坐標系,進行了大量的底層編程,而本文運用曲線擬合工具箱,可以直接完成曲線擬合工作);結合文獻[2]的反求思路,充分利用數字化測量手段,并借助Matlab 語言及其曲線擬合工具箱,可以較為準確、高效地提取一配對漸開線斜齒輪的參數。
1 反求步驟
1.1 反求思路
首先,依據輪齒點云確認齒廓線為漸開線,在此基礎上,建立齒輪的端面齒形,利用PRO/E 軟件的測量功能,測量齒形相關的主要幾何尺寸(齒頂圓直徑、齒根圓直徑、齒全高、公法線長度等),進而反求出基本參數(模數、壓力角、齒頂高系數、頂隙系數、螺旋角等)。
1.2 點云數據處理
點云是建立端面齒形和判斷廓線的重要依據,所以將Imageware 中的系統誤差有效數值設定為精確到小數點后第四位,將齒輪點云的中心軸取定為z軸,精確取定方法是,利用齒輪的兩端軸點云分別擬合圓柱,取圓柱軸心線,再將二者軸心擬合為同一軸線,將此軸線與z軸對齊,取與z軸垂直的截面從齒寬部位(即輪齒的上端面和下端面之間)的上、中、下三部分截取齒輪點云;判斷齒廓線類型時,考慮到齒輪齒形多是漸開線以及齒輪修形的問題,為保證齒形特征正確,選取點云時,視總點數而定,需去除掉占齒全高點云約1/10 的根部點云。
依據點云建立齒輪的端面齒形時,點云的處理原則是:齒頂圓處3 點以上,齒根圓角處3 點以上,廓線點4 點以上,運用圓弧擬合齒頂圓以及齒根圓角,使用依公差構造曲線命令擬合齒廓線(* .imw),分別將各輪齒保存為IGS 格式,運用PROE 軟件打開文件,在草繪命令中已經默認齒輪中心為坐標原點,以原點為中心,作圓分別與齒頂圓弧、齒根圓弧相切,其直徑即為測量得到的齒頂圓直徑、齒根圓直徑,由于草繪中沒有陣列命令,只能根據齒輪齒數計算輪齒間的角度,作復制旋轉,進一步測量公法線長度。
1.3 判定齒廓為漸開線的方法
第一步:初始基圓半徑的確定
假設反求齒輪為漸開線齒輪,漸開線上任意點的法線與基圓相切,且齒輪中心到法線的垂直距離為基圓半徑,則確定初始基圓半徑需要在齒廓上選取一個基準點,根據測點個數為奇、偶數的不同確定基圓半徑時,基準點的選取方法也不相同。
若為奇數時,如圖1所示,連接中間點兩旁的點A和點B,AB所在直線為m,過AB中點作直線m的垂線n,n與測點擬合曲線交于點O1(即為擬合初始基圓半徑的基準點);若為偶數時,取中間兩點A和B,其他作法同上。其中n即為擬合漸開線的法線,取坐標原點O到n的距離為初始基圓半徑。
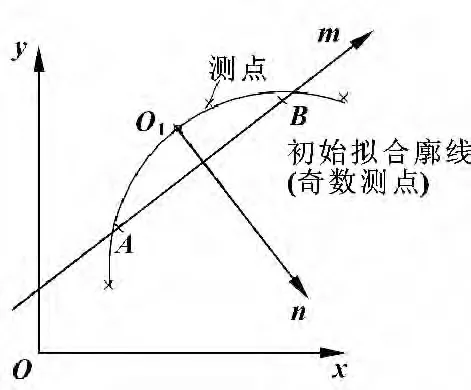
圖1 初始基圓半徑
第二步:初始漸開線的生成
通過初始基圓半徑按漸開線形成原理生成初始漸開線(第一個新生漸開線),與測點擬合曲線建立了誤差分析依據。
第三步:根據齒形誤差(Δ,見圖2所示)修正基圓
如圖2所示,新生漸開線O1P0與測點擬合曲線O1P交于點O1,點P為點O1附近的一測點,過點P作初始基圓的切線PB,交曲線O1P0于點P0,設虛線與的夾角為調整角Δθ,線段為齒形誤差Δ,由于Δ ?Δθ·,則以O1為基點,將曲線O1P0向曲線O1P旋轉Δθ,同時調整法線,取原點O到法線的距離為新生基圓半徑,以此半徑再次生成了漸開線,重復以上步驟,直至調整角Δθ 和齒形誤差Δ 趨近于零,且小于給定誤差ε=10-q,根據多次實驗發現,當q值大于4 以后,迭代較為穩定;當q值大于12 以后,迭代結果非常理想。

圖2 誤差原理
第四步:齒形分析
按以上原理,依據齒廓線測點坐標數據,運用Matlab 軟件的曲線擬合工具箱和圖形功能,若可以得出較為穩定的基圓半徑值,且調整角和齒形誤差極為接近0 值,則可判定齒廓為漸開線性質;否則,不是漸開線。
1.4 幾何尺寸的測量和基本參數的反求
判定了齒輪類型之后,則可以明確其基本參數包括:齒數、模數、壓力角、齒頂高系數、頂隙系數、螺旋角、變位系數;利用proe 中的數字化測量功能,需要測量的主要幾何尺寸包括:齒頂圓直徑、齒根圓直徑、齒全高、公法線長度等。設定精確到小數點后第二位,取平均值為最終數值。公法線長度的跨測齒數由經驗公式(k=z/9 +0.5)初定,測量得出的齒全高根據齒輪齒高(表1),可以查出齒頂高系數與頂隙系數c*,基圓齒距可以根據公法線長度求得,公式如下:pb=Wn+1-Wn,并基于基圓齒距(表2)得出對應的模數和壓力角。

表1 部分齒輪齒高表[3]
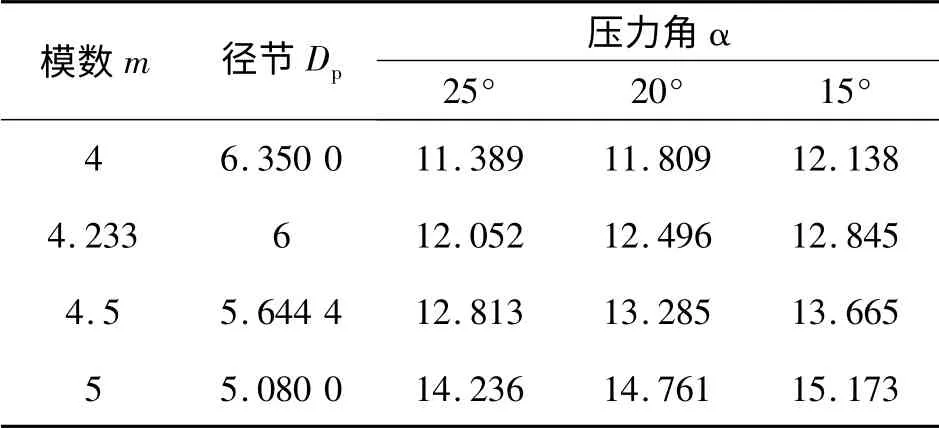
表2 部分基圓齒距(基節)數據表[3]
1.5 變位的反求
表3 為文獻[4](機械設計手冊)中斜齒輪的公法線長度計算公式,從計算公式中可以看出,公法線長度與變位系數是密不可分的,根據表6 計算出標準斜齒輪的公法線長度W,并求出公法線長度的上、下偏差Ewms和Ewmi[4];測得公法線的實際長度W',如果W'落在偏差范圍內,則說明齒輪符合標準齒輪的切制要求;若W'落在偏差范圍外,則齒輪為變位齒輪。

表3 公法線長度計算公式[4]
2 反求實例
如圖3(a)所示,通過實物照片可直觀判斷這對齒輪為外嚙合斜齒圓柱齒輪,齒數z1=24,z2=27;圖3(b)是在Imageware 軟件中讀取的齒輪點云模型。

圖3 齒輪實物及其點云
2.1 點云數據處理
將齒輪軸心取定為z軸的效果如圖4所示,根據每個截面齒廓線點云完整性(即點云數量較多且分布均勻)的不同,3 個截面選取的輪齒個數分別為:4 個、5 個、4 個,且選取同一輪齒的雙側廓線點云作為研究對象。圖5 是Matlab 中讀取的部分廓線坐標點數據,考慮到找O1點的規則不同以及測點處理方法的可行性,需要選取同一輪齒兩側齒廓的測點,且測點個數要存在奇數和偶數。

圖4 點云對齊效果

圖5 小齒輪齒面測點數據
部分輪齒的齒形擬合效果如圖6所示。

圖6 擬合后的齒形
2.2 判定齒廓線是否為漸開線
設定誤差ε=10-12,圖7(a)中的基圓半徑值穩定在64.35 mm,圖7(b)中調整角趨近于零值,則說明齒輪的齒廓線符合漸開線的生成原理,則這對齒輪為漸開線斜齒圓柱齒輪。
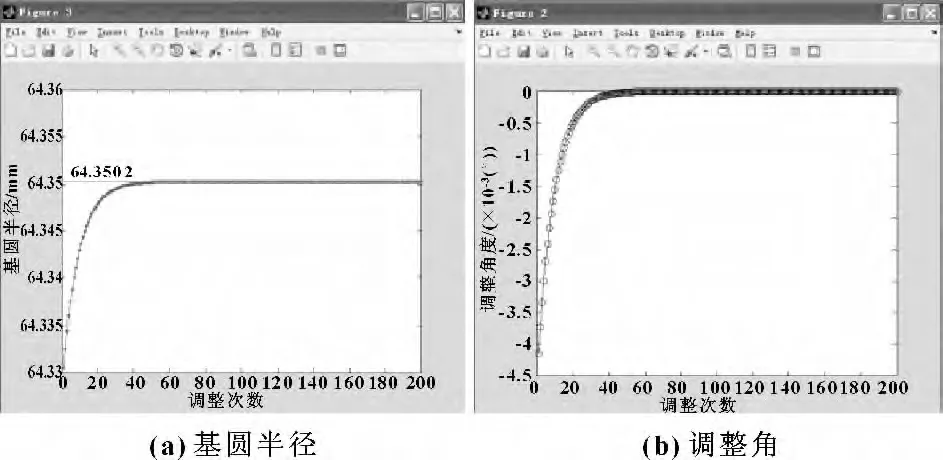
圖7 基圓半徑反求
表4 為小齒輪截面2 中5 個輪齒的基圓半徑擬合結果,同理,可求出大齒輪的基圓半徑值,則對二者的基圓半徑取平均值如下:
小齒輪基圓半徑rb1=56.859 mm大齒輪基圓半徑rb2=64.789 mm

表4 小齒輪基圓半徑反求 mm
2.3 端面模型的測量以及參數的反求
既然判定了齒輪為漸開線斜齒圓柱齒輪,圖8 中即為部分測量的齒頂圓與齒根圓直徑尺寸,設定精確到小數點后第四位,取平均值為最終數值。

圖8 幾何尺寸的測量
根據公式計算跨齒數:小齒輪k=3;大齒輪k=4。
端面模型測量的主要幾何尺寸數據取平均值如表5所示。

表5 主要幾何尺寸測量數據
在齒輪齒高表1 中,齒全高接近11.25,則取齒全高為h=11.25,對應的模數mn=5、齒頂高系數、頂隙系數。
計算得出基圓齒距數據如表6所示。

表6 基圓齒距值計算
則由基圓齒距表2 可知模數mn=5、壓力角αn=20°。
2.4 變位的反求
根據文獻[5]中公法線上、下偏差的計算方法以及實例的應用,總結了6—8 級公法線長度上、下偏差值,如表7所示。

表7 公法線的上、下偏差
根據齒輪的齒形特征、使用環境、粗糙度等判斷齒輪的精度等級大約為6 級,則選取公法線長度的上、下偏差分別為-0.144 和-0.198。
根據公式計算出標準斜齒圓柱齒輪的跨齒數、中間變量(W'、z')、公法線長度以及上、下偏差,還有實際測量的公法線長度值,如表8所示,則判定齒輪為標準漸開線斜齒圓柱齒輪。

表8 小齒輪的變位判定
2.5 螺旋角的反求
表3 中,代入中間變量后,變位斜齒輪的公法線長度Wk的計算公式如下:
Wk=mncos αn[π(k-0.5)+ z'·inv αn+2xn·tan αn]
于是推導出端面壓力角αt
則可求出螺旋角

為了驗證齒輪參數反求方法的可行性,將反求參數與已知的齒輪設計參數進行對比分析,表9 為反求參數與理論參數的比較,表10 為反求幾何尺寸與理論幾何尺寸的比較。

表9 反求參數與理論參數的比較
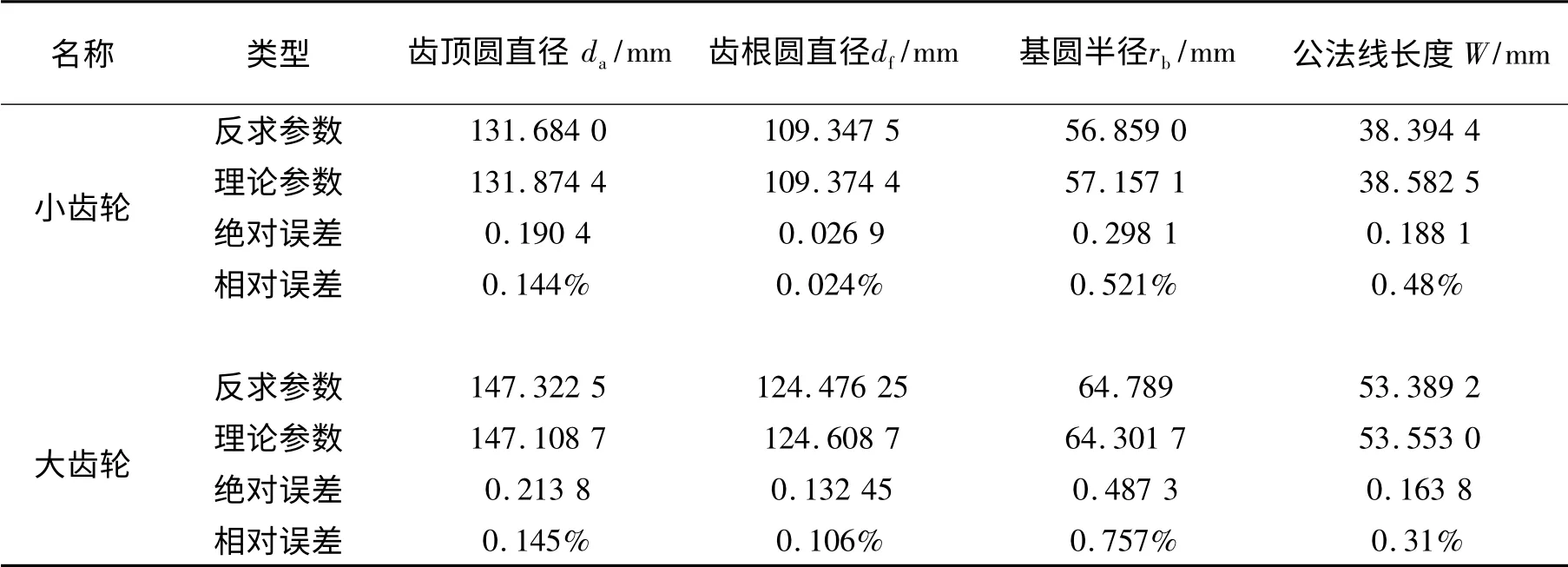
表10 反求幾何尺寸與理論幾何尺寸的比較
齒輪原始設計參數中取6 級精度,在高精度的齒輪機床上范成加工,齒面最終精加工需要精密磨齒或剃齒,齒面粗糙度1.6,齒根粗糙度3.2,用于在高速下平穩地回轉,并要求有最高的效率和低噪聲的齒輪。根據表9 和表10 的結果驗證可知,所求參數基本控制在不影響齒輪實際應用的前提下,符合齒輪實際測量要求。
3 結論
基于實物逆向工程技術、齒輪實際測繪理論、數值分析理論等深入地研究了漸開線斜齒圓柱齒輪的參數提取途徑,在借鑒文獻[2]中基圓半徑反求算法的基礎上,進行了簡化,并綜合利用了Matlab 語言及其工具箱、三維CAD/CAM 軟件系統PRO/E 和Imageware 逆向軟件系統,實現了斜齒輪的齒形定性和主要幾何參數反求。和已有的方法相比,即無需使用實物高精度量具、又避開了利用高級語言進行底層編程的復雜勞動,在幾何尺寸計算時采用計算機編程,可以實現自動、高精度、重復計算;相對而言具有較高的效率、易用性及可操作性,并減少了人為主觀判斷因素的影響。
反求結果和實際設計參數之間的誤差的產生和所測點云的質量、測量點云時噴涂的顯像劑的厚度不均、齒輪自身的制造誤差以及反求處理方法相關;反求過程中如何全面考慮、分析以上因素等對結果的影響以完善反求方法,使得反求結果的準確性、穩定性更為理想、便于工程實際中應用的問題有待進一步的研究。
[1]周彭.進口啟動機驅動齒輪的測繪及計算[J].汽車電器,1994(6):13-19.
[2]陳麗萍,帥梅,楊川,等.一種反求漸開線齒輪(或花鍵)參數的實用方法[J].機械科學與技術,2001,20(3):353-355,358.
[3]張展.齒輪設計與實用數據速查[M].北京:機械工業出版社,2009.
[4]成大先.機械設計手冊·第3 卷[M].5 版.北京:化學工業出版社,2008.
[5]茆燕荷.摩托車最理想的齒輪齒厚減薄量[J].摩托車技術,1995(2):3-5.
[6]趙振江.逆向法選擇漸開線齒輪的變位系數[J].機械傳動,2008,32(4):48-59.
[7]周湘衡.端面模數為標準的斜齒輪測繪[J].機械傳動,2003,27(5):49-51.