六自由度液壓并聯(lián)機(jī)器人結(jié)構(gòu)優(yōu)化設(shè)計(jì)
2014-05-10 07:47:58劉蘭波唐志勇裴忠才
機(jī)床與液壓 2014年23期
關(guān)鍵詞:結(jié)構(gòu)設(shè)計(jì)
劉蘭波,唐志勇,裴忠才
(北京航空航天大學(xué)自動(dòng)化科學(xué)與電氣工程學(xué)院,北京100191)
0 前言
六自由度液壓并聯(lián)機(jī)器人是一種應(yīng)用比較廣泛的并聯(lián)結(jié)構(gòu)。它是1965年被STEWART D[1]首先提出來(lái)的。后來(lái)經(jīng)過(guò)慢慢的改進(jìn)與發(fā)展,便逐漸演變成了如圖1所示的結(jié)構(gòu)。

圖1 六自由度液壓并聯(lián)機(jī)器人
它由上下兩個(gè)平臺(tái)組成,下平臺(tái)是定平臺(tái),上平臺(tái)是動(dòng)平臺(tái),上下平臺(tái)之間用6 根可變長(zhǎng)度的桿件來(lái)連接。并聯(lián)機(jī)器人與串聯(lián)器人相比,具有以下特性:(1)剛度大,結(jié)構(gòu)穩(wěn)定;(2)具有較強(qiáng)的承載能力;(3)運(yùn)動(dòng)精度高;(4)動(dòng)態(tài)性能好;(5)并聯(lián)機(jī)器人正解容易,逆解困難,此與串聯(lián)機(jī)器人正好相反。由于并聯(lián)機(jī)器人具有以上的特點(diǎn),故其在很多領(lǐng)域都得到了廣泛的應(yīng)用[2],比如并聯(lián)機(jī)床、飛行模擬器等。
并聯(lián)機(jī)器人的正運(yùn)動(dòng)學(xué)主要分為解析法和數(shù)值法兩種,前者主要是通過(guò)消元法消去機(jī)構(gòu)方程中的未知數(shù),從而使機(jī)構(gòu)的輸入輸出方程為僅含一個(gè)未知數(shù)的高次方程。其特點(diǎn)是不需要初值并可能求解出全部解[3],但數(shù)學(xué)推導(dǎo)復(fù)雜,在實(shí)際控制中沒(méi)有實(shí)用價(jià)值;后者需要求解一組非線性方程,從而求得與輸入對(duì)應(yīng)的動(dòng)平臺(tái)的位置和姿態(tài)[4]。數(shù)值法不能保證解出全部解,但計(jì)算方法簡(jiǎn)單,對(duì)實(shí)時(shí)仿真和控制具有實(shí)用價(jià)值。因此文中第一部分對(duì)6-3 模型的六自由度并聯(lián)機(jī)器人提出了一種快速的數(shù)值解法。第二部分分析了此并聯(lián)機(jī)器人的運(yùn)動(dòng)空間。最后鑒于傳統(tǒng)復(fù)合球鉸的缺點(diǎn),設(shè)計(jì)了一種復(fù)合虎克鉸。
1 6-DOF 并聯(lián)機(jī)器人正運(yùn)動(dòng)學(xué)分析
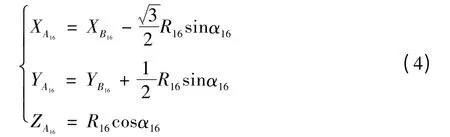
如圖2所示,當(dāng)平臺(tái)變成下六鉸點(diǎn)上三鉸點(diǎn)(6-3)的機(jī)構(gòu)時(shí),連接到同一個(gè)上鉸點(diǎn)的兩個(gè)油缸,可以看做繞固定軸旋轉(zhuǎn)的虛擬桿。如A16B1和A16B2可以看做是一個(gè)繞B1B6旋轉(zhuǎn)的桿A16B16,長(zhǎng)度為R16,設(shè)兩個(gè)桿長(zhǎng)分別為l1和l6,A16B16與Z軸夾角為α16,B1B16=d1,B6B16=d6

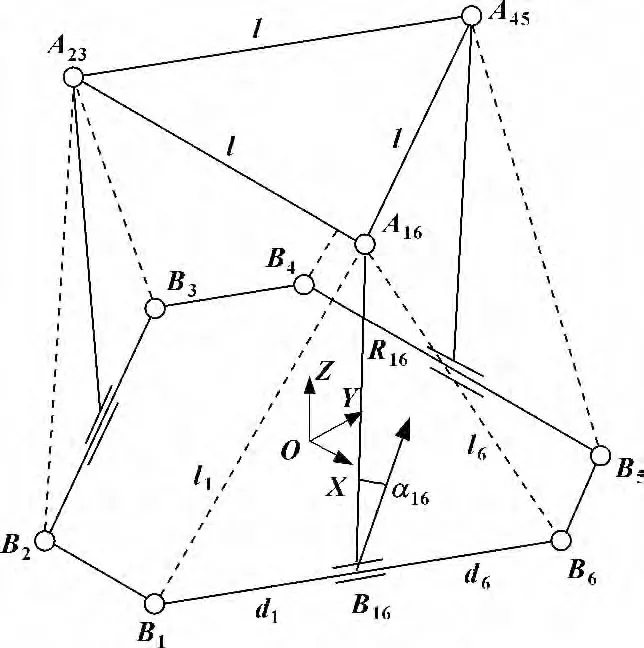
圖2 6-3 型并聯(lián)機(jī)器人結(jié)構(gòu)等效圖
解式(1)得

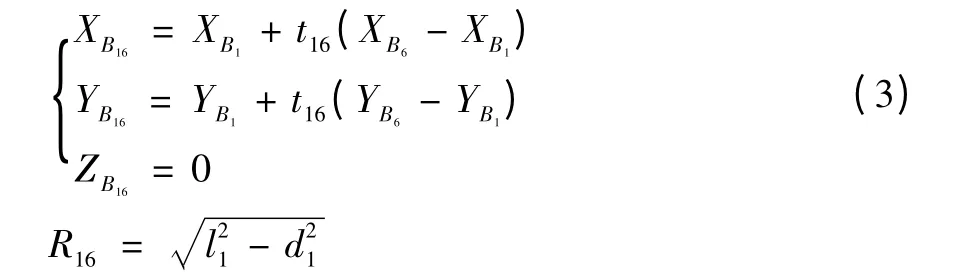
設(shè)α16為R16與Z軸的夾角,圖示方向?yàn)檎瑮UR16的上端b16的坐標(biāo)為
同理對(duì)于b23和b45也可以表示出來(lái)。
設(shè):
令

解方程組(5)可以得到α16,α23,α45的解析解。
解析解法計(jì)算量太大,無(wú)法應(yīng)用于實(shí)時(shí)控制,文中采用Newton 法解這個(gè)非線性方程,可以得到方程的數(shù)值解。
令
所以求解方程組(5)的迭代公式為
相對(duì)于6-6 的結(jié)構(gòu)中需要求解6 個(gè)變量,該算法只需要計(jì)算3 個(gè)變量便可確定上平臺(tái)位姿,計(jì)算量可以顯著減少。
2 并聯(lián)機(jī)器人的工作空間分析
機(jī)器人的工作空間是機(jī)器人的執(zhí)行端可以到達(dá)的空間區(qū)域,它是衡量機(jī)器人性能的一個(gè)很重要的指標(biāo)。一般來(lái)說(shuō),并聯(lián)機(jī)器人工作空間的求解方法有數(shù)值法和解析法兩種。在解析法方面,由于其比較依賴于機(jī)構(gòu)位置解的研究結(jié)果,目前還沒(méi)有很好的方法。而數(shù)值解主要以求工作空間的邊界為目的,并且直接計(jì)算出工作空間的大小,表現(xiàn)直觀,目前應(yīng)用也比較廣泛[5]。
影響并聯(lián)機(jī)器人工作空間的因素主要有3 個(gè)方面:桿長(zhǎng)的限制、轉(zhuǎn)動(dòng)副轉(zhuǎn)角的限制和連桿之間干涉的限制。在已知機(jī)器人初始狀態(tài)的情況下,利用Matlab 軟件對(duì)機(jī)器人工作空間進(jìn)行分析。其程序流程如圖3所示。
圖3 程序流程
應(yīng)用Matlab 程序搜索出不同姿態(tài)下并聯(lián)機(jī)器人的三維工作空間,如圖4所示。
由仿真結(jié)果可以看出,并聯(lián)機(jī)器人上平臺(tái)中心的工作空間最低點(diǎn)位504 mm,最高點(diǎn)位786 mm;工作空間繞Z軸對(duì)稱;并聯(lián)機(jī)器人的工作空間由上部的凸面和下部的凹面包圍而成。仿真證明該結(jié)構(gòu)擁有相對(duì)足夠的工作空間。

圖4 并聯(lián)機(jī)器人的工作空間
3 結(jié)構(gòu)優(yōu)化設(shè)計(jì)
3.1 整體結(jié)構(gòu)
根據(jù)運(yùn)動(dòng)學(xué)正解和工作空間的分析,整體采用下6 上3 的結(jié)構(gòu),如圖5所示。

圖5 優(yōu)化設(shè)計(jì)后的并聯(lián)機(jī)器人
3.2 復(fù)合虎克鉸的設(shè)計(jì)
長(zhǎng)久以來(lái),對(duì)于復(fù)合球鉸的設(shè)計(jì)一直是個(gè)難題。要實(shí)現(xiàn)兩個(gè)球鉸球心重合的效果,現(xiàn)在普遍的設(shè)計(jì)方法是使用大小兩個(gè)球鉸進(jìn)行重合疊加。這種結(jié)構(gòu)存在著兩個(gè)問(wèn)題:一是轉(zhuǎn)動(dòng)范圍很小;二是加工復(fù)雜且可恢復(fù)性差。基于以上存在的問(wèn)題,需要設(shè)計(jì)一種復(fù)合虎克鉸,這種結(jié)構(gòu)要具有3 個(gè)自由度。最初,設(shè)計(jì)了圖6所示的結(jié)構(gòu)。此結(jié)構(gòu)的設(shè)計(jì)中,上音叉的轉(zhuǎn)動(dòng)軸穿過(guò)兩個(gè)下音叉的轉(zhuǎn)動(dòng)軸,但通過(guò)應(yīng)力校核分析發(fā)現(xiàn),該結(jié)構(gòu)的尺寸還是比較大的。基于在滿足強(qiáng)度要求的前提下結(jié)構(gòu)緊湊和體積最小的原則,做進(jìn)一步改進(jìn)。滑動(dòng)軸承具有體積小,能夠承受巨大的沖擊與振動(dòng)載荷等優(yōu)點(diǎn)。因此在此應(yīng)用滑動(dòng)軸承進(jìn)行設(shè)計(jì)。其三維機(jī)械結(jié)構(gòu)如圖7所示,它具有結(jié)構(gòu)緊湊、簡(jiǎn)單,剛性大,轉(zhuǎn)動(dòng)范圍大,容易加工的優(yōu)點(diǎn)。

圖6 最初設(shè)計(jì)
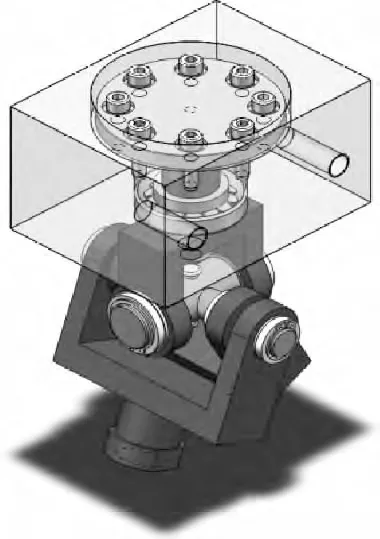
圖7 最終設(shè)計(jì)
通過(guò)3 個(gè)轉(zhuǎn)軸來(lái)實(shí)現(xiàn)3 個(gè)方向的轉(zhuǎn)動(dòng)。其中活塞桿內(nèi)音叉和活塞桿外音叉共用一個(gè)軸,且該軸與上音叉的轉(zhuǎn)軸構(gòu)成可轉(zhuǎn)動(dòng)的十字包結(jié)構(gòu),這樣就實(shí)現(xiàn)了多自由度的效果。下面音叉結(jié)構(gòu)的軸和軸套直接用滑動(dòng)軸承,這樣可以是結(jié)構(gòu)更為緊湊。且具有自潤(rùn)滑效果。而上音叉的轉(zhuǎn)動(dòng)應(yīng)用的單列圓錐滾子軸承,這樣做的最大好處是可以承受較大的軸向力。從整體功能上來(lái)看該結(jié)構(gòu)復(fù)合虎克鉸有4 個(gè)轉(zhuǎn)動(dòng)副,完全滿足六自由度平臺(tái)對(duì)上虎克鉸自由度的要求。另外,相對(duì)于球鉸來(lái)說(shuō)具有很好的耐磨性和易維護(hù)性。并且該結(jié)構(gòu)的轉(zhuǎn)角范圍很大,進(jìn)而可以大大提高整個(gè)平臺(tái)的工作空間。下平臺(tái)復(fù)合虎克鉸的設(shè)計(jì)思路與此一致,在此不再贅述。
4 結(jié)論
針對(duì)6-3 型六自由度液壓并聯(lián)機(jī)器人提出了一種正運(yùn)動(dòng)學(xué)的解法,將位姿的求解轉(zhuǎn)換成3 個(gè)虛擬角度的求解,再用數(shù)值方法解算。相對(duì)于6-6 的結(jié)構(gòu)中需要求解6 個(gè)變量,計(jì)算量顯著減少。然后通過(guò)對(duì)此并聯(lián)機(jī)器人的工作空間進(jìn)行了分析,驗(yàn)證了其足夠大的工作空間。最后,對(duì)此型機(jī)器人進(jìn)行了結(jié)構(gòu)優(yōu)化,設(shè)計(jì)了采用滑動(dòng)軸承的復(fù)合虎克鉸,有緊湊、簡(jiǎn)單,剛性大,轉(zhuǎn)動(dòng)范圍大,容易加工等優(yōu)點(diǎn)。
[1]STEWART D A.Platform with 6-DOF[C].Proc.On Institution of Mechanical Engineering,1965,180:371-386.
[2]黃真,孔令富,方躍法.并聯(lián)機(jī)器人機(jī)構(gòu)學(xué)理論及控制[M].北京:機(jī)械工業(yè)出版社,1997.
[3]王洪斌,魏立新,王洪瑞.并聯(lián)機(jī)器人的理論研究現(xiàn)狀[J].自動(dòng)化博覽,2002(5):42-45.
[4]趙慧,韓俊偉,張尚盈,等.六自由度并聯(lián)機(jī)器人運(yùn)動(dòng)學(xué)分析和計(jì)算[J].機(jī)床與液壓,2003(3):70-72.
[5]黃真,趙永生,趙鐵石.高等空間機(jī)構(gòu)學(xué)[M].北京:高等教育出版社,2006.
猜你喜歡
哲學(xué)評(píng)論(2021年2期)2021-08-22 01:53:34
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中華詩(shī)詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
影視與戲劇評(píng)論(2016年0期)2016-11-23 05:26:01
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50