基于PMAC2 控制的刀具刃磨中心參數(shù)整定
2014-11-18 12:23:34王占領(lǐng)白海清
機(jī)床與液壓 2014年20期
王占領(lǐng),白海清
(陜西理工學(xué)院機(jī)械工程學(xué)院,陜西漢中 723003)
運(yùn)動(dòng)控制卡是刀具刃磨中心控制系統(tǒng)的核心部件。系統(tǒng)以工業(yè)控制計(jì)算機(jī)為基礎(chǔ),Tubro PMAC2 PCI 直接插入IPC 的PCI 總線插槽形成主從式結(jié)構(gòu),PMAC2 完成對(duì)伺服軸的控制以及檢測(cè),工控機(jī)實(shí)現(xiàn)對(duì)系統(tǒng)的管理功能,編碼器、電機(jī)、光柵等硬件裝置通過(guò)軸轉(zhuǎn)接板ACC-8P 與主卡連接,從而形成了刀具刃磨中心控制系統(tǒng)的硬件部分。為了使刀具刃磨中心獲得良好的穩(wěn)態(tài)性能和動(dòng)態(tài)性能,必須對(duì)連接好的系統(tǒng)控制環(huán)進(jìn)行調(diào)整和校正。在自動(dòng)控制領(lǐng)域,PID 控制算法一直起著非常重要的作用,而數(shù)字PID 具有控制準(zhǔn)確、實(shí)現(xiàn)方便等特性,正越來(lái)越多地應(yīng)用于現(xiàn)代控制系統(tǒng)。通過(guò)對(duì)數(shù)字PID 控制算法的運(yùn)用,利用PMAC2 參數(shù)調(diào)整軟件Pewin32 PRO2 對(duì)系統(tǒng)的性能參數(shù)進(jìn)行調(diào)整,達(dá)到提高系統(tǒng)性能的目的。
1 PMAC2 中PID
1.1 PMAC2 中PID 控制原理
PMAC2 作為一個(gè)全數(shù)字伺服系統(tǒng),由軟件通過(guò)調(diào)節(jié)PID 參數(shù)實(shí)現(xiàn)對(duì)位置、速度和電流的控制,同時(shí)在控制過(guò)程中引入了具有回饋和前饋復(fù)合控制的數(shù)字控制體系結(jié)構(gòu),這種結(jié)構(gòu)可以消除系統(tǒng)的靜態(tài)位置誤差以及外界擾動(dòng)引起的誤差,可以滿足大部分場(chǎng)合的要求。PMAC2 伺服控制算法原理如圖1 所示。
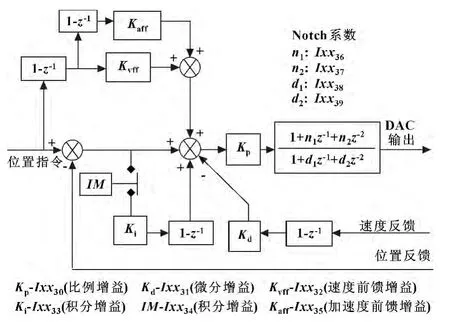
圖1 PMAC2 PID+陷波伺服濾波器
1.2 PMAC2 中PID 參數(shù)調(diào)整
PMAC2 型運(yùn)動(dòng)控制卡的PID 參數(shù)調(diào)整是通過(guò)對(duì)電機(jī)I 變量的調(diào)整來(lái)實(shí)現(xiàn)的。在電機(jī)整定過(guò)程中涉及到的I 變量見(jiàn)表1。

表1 PMAC2 PID 主要調(diào)整參數(shù)
2 刀具刃磨中心數(shù)控系統(tǒng)參數(shù)整定
2.1 系統(tǒng)PID 參數(shù)調(diào)整
作為線性定常系統(tǒng)中最差的激勵(lì)信號(hào),階躍信號(hào)相當(dāng)于理想化的開(kāi)關(guān)信號(hào),如果系統(tǒng)在階躍激勵(lì)作用下能滿足要求的話,在其他激勵(lì)信號(hào)作用下基本也能滿足要求。PMAC2 通過(guò)執(zhí)行PID 參數(shù)調(diào)整程序激勵(lì)電機(jī),采集響應(yīng)數(shù)據(jù),根據(jù)響應(yīng)曲線來(lái)調(diào)整和評(píng)估系統(tǒng)性能。在實(shí)際階躍響應(yīng)調(diào)整過(guò)程中,采用自動(dòng)+手動(dòng)的方式對(duì)系統(tǒng)的PID 參數(shù)進(jìn)行整定:
首先進(jìn)行系統(tǒng)的自動(dòng)調(diào)整,在PID 調(diào)節(jié)模塊下選擇需要調(diào)整的電機(jī)(以X 軸電機(jī)為例),設(shè)定好波特率、帶寬、信號(hào)幅度、時(shí)間常數(shù)等參數(shù)進(jìn)行自動(dòng)調(diào)整;以自動(dòng)調(diào)整的結(jié)果為起點(diǎn)再進(jìn)行交互式調(diào)整,通過(guò)響應(yīng)曲線進(jìn)行分析判斷,依據(jù)前面所述的PID 調(diào)節(jié)原則,確定下一步要調(diào)節(jié)的參數(shù)及其大小;反復(fù)調(diào)整直至結(jié)果比較理想為止。系統(tǒng)X 軸的階躍響應(yīng)過(guò)程如圖2 所示。圖中cts 表示脈沖個(gè)數(shù),下同。
圖2 (a)為系統(tǒng)自動(dòng)調(diào)節(jié)時(shí)的脈沖響應(yīng),由響應(yīng)曲線可知:系統(tǒng)的跟隨誤差較大同時(shí)伴隨有振蕩;圖2 (b)中的響應(yīng)曲線反映出系統(tǒng)的跟隨誤差已明顯減小,需要繼續(xù)增加系統(tǒng)剛性;圖2 (c)表明系統(tǒng)存在超調(diào)振蕩,但頻率較低;圖2 (d)反映系統(tǒng)的綜合性能較好,基本能夠滿足控制要求。表2 為X軸PID 參數(shù)調(diào)整過(guò)程記錄。
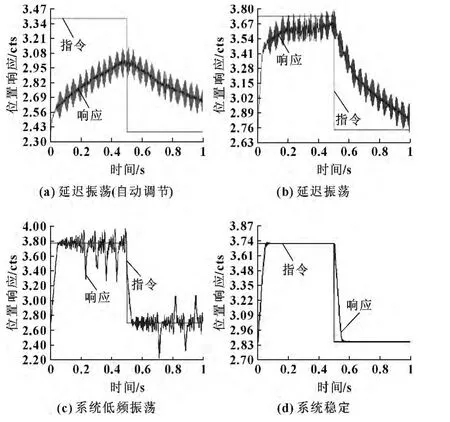
圖2 X 軸階躍響應(yīng)過(guò)程
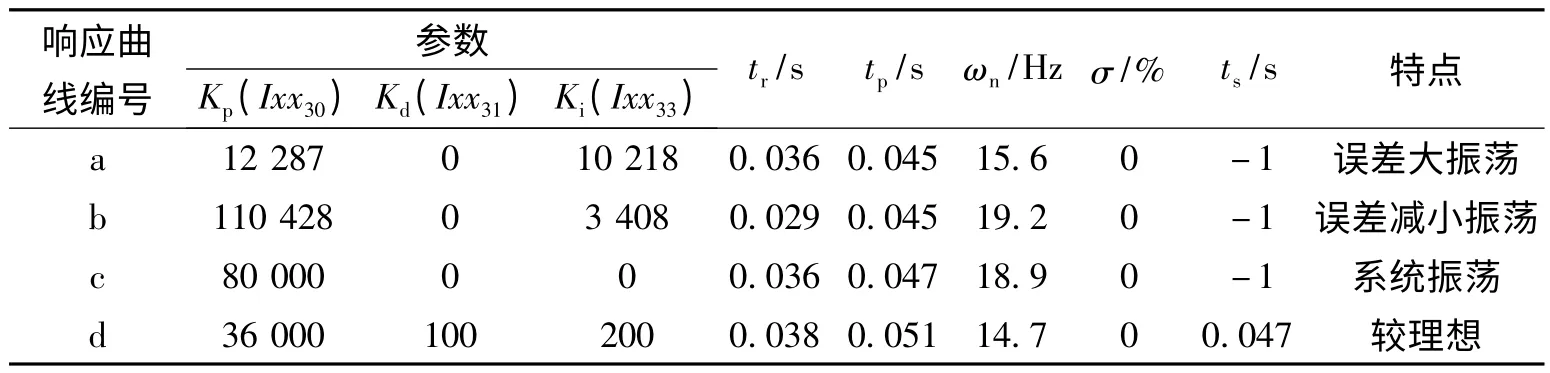
表2 X 軸PID 參數(shù)調(diào)節(jié)記錄
2.2 系統(tǒng)前饋增益調(diào)整
對(duì)于沒(méi)有前饋的伺服系統(tǒng)來(lái)說(shuō),跟隨誤差和速度、加速度是成比例的。伺服系統(tǒng)引入速度前饋和加速度前饋?lái)?xiàng)后,可減小甚至消除系統(tǒng)跟隨誤差。PMAC2 卡通過(guò)拋物線響應(yīng)調(diào)節(jié)速度和加速度前饋。首先是給系統(tǒng)一個(gè)拋物線激勵(lì)以觀察效果,以減小跟隨誤差和相關(guān)系數(shù)為目的,從零開(kāi)始增加速度前饋增益,直到比率盡可能地接近0。加速度前饋調(diào)整方法與之相似。
圖3 表示X 軸電機(jī)在不同速度前饋系數(shù)Kvff下的拋物線響應(yīng)曲線。
從圖3 (a)可看出拋物線響應(yīng)過(guò)程中速度跟隨誤差反相,主要原因是速度前饋系數(shù)Kvff過(guò)大,需要減小Kvff;從圖3 (b)可看出速度跟隨誤差過(guò)大,原因主要是阻尼的影響,應(yīng)增加速度前饋系數(shù)Kvff加以調(diào)節(jié);圖3 (c)的速度跟隨誤差基本上到最小了,并且集中在中部,沿運(yùn)動(dòng)軌跡均勻分布,是較理想的調(diào)節(jié)結(jié)果。表3 為系統(tǒng)X 軸拋物線響應(yīng)調(diào)節(jié)過(guò)程記錄,表中:tv表示速度相關(guān)時(shí)間,越小越好;Fe表示平均誤差;ta表示加速度相關(guān)時(shí)間,越小越好;Fe(M)表示最大速度跟隨誤差。

圖3 X 軸拋物線響應(yīng)過(guò)程

表3 X 軸拋物線響應(yīng)調(diào)節(jié)記錄
3 結(jié)論
影響系統(tǒng)性能的因素很多,在調(diào)整時(shí)需要綜合各方面的可能性,利用多元參數(shù)、多方法進(jìn)行調(diào)整。采用試驗(yàn)法對(duì)基于PMAC2 的刀具刃磨中心PID 參數(shù)進(jìn)行調(diào)整,可以較直觀地實(shí)現(xiàn)系統(tǒng)響應(yīng)速度快、運(yùn)動(dòng)平穩(wěn)的目的,獲得良好的穩(wěn)態(tài)性能和動(dòng)態(tài)品質(zhì)。
[1]吉方,張勇斌,張連,等.基于PMAC 的數(shù)控系統(tǒng)運(yùn)動(dòng)控制參數(shù)調(diào)節(jié)技術(shù)[J].組合機(jī)床與自動(dòng)化加工技術(shù),2010(9):70 -72.
[2]朱立達(dá),朱春霞,蔡光起.PID 調(diào)節(jié)在PMAC 運(yùn)動(dòng)控制器中的應(yīng)用[J].組合機(jī)床與自動(dòng)化加工技術(shù),2007(2):50 -53.
[3]DELTA TAU Data System,Inc.PMAC2 Software Reference[M],2004.
[4]DELTA TAU Data System,Inc.Pcomm32Pro Software Reference[M],2004.
[5]王瑤,蘇文海,邱影.PMAC 運(yùn)動(dòng)控制卡在動(dòng)態(tài)運(yùn)動(dòng)控制中的應(yīng)用[J].機(jī)床與液壓,2012,40(20):126 -128.
猜你喜歡
語(yǔ)數(shù)外學(xué)習(xí)·高中版上旬(2024年18期)2024-02-20 00:00:00
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2022年1期)2022-04-26 13:59:56
中學(xué)生數(shù)理化·中考版(2021年10期)2021-11-22 07:26:38
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中學(xué)生數(shù)理化·中考版(2019年10期)2019-11-25 09:39:04
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45