亞軌道飛行器再入過程執行機構故障仿真
2014-12-25 09:21:22王亞輝李新國王謙
飛行力學 2014年5期
關鍵詞:故障
王亞輝,李新國,王謙
(西北工業大學航天學院,陜西西安710072)
0 引言
由于亞軌道飛行器(SRLV)試驗費用極為昂貴,進行專門的故障試驗也相當危險,致使用于故障模式及故障響應分析的試驗數據極其有限。通過對飛行過程中可能出現的故障進行仿真,分析亞軌道飛行器性能參數的變化,可以確定生產過程中出現的誤差和外部干擾因素對飛行器的影響。目前亞軌道飛行器尚處于初步研究階段[1],國內外關于亞軌道飛行器故障仿真的文獻非常有限。
亞軌道飛行器的再入過程要經歷從大氣層外到大氣層內的跨越式飛行,涉及大氣層外和大氣層內的控制技術,需要利用RCS和氣動舵兩種執行機構協同工作來完成亞軌道飛行器的再入姿態控制。為了提高飛行任務的安全性與可靠性,必須考慮飛行器在執行機構故障情況下的飛行能力。
本文通過總結亞軌道飛行器再入過程中執行機構的故障模式及成因,建立故障仿真模型并針對典型故障進行了仿真,分析了故障情況對飛行能力的影響。
1 再入過程執行機構配置
亞軌道飛行器再入過程具有氣動舵和RCS兩套執行機構。再入初期處于低動壓區,氣動執行機構控制失效,此階段RCS獨立控制。隨著高度下降,動壓逐漸增大,氣動效率增強,為減少RCS流量,此階段利用RCS和氣動舵進行復合控制。進入高動壓區后,氣動舵效率足夠高,RCS完全退出控制,可利用氣動舵獨立控制[2]。
1.1 RCS控制模型
RCS利用推力器噴管產生的反作用推力提供飛行器的姿態控制力矩。反作用控制系統中推力器在理論上可以采用變推力發動機或者開關型發動機。但是變推力發動機在研制應用中還存在一定困難,故當前工程中使用的推力器屬于開關型的。本文采用的亞軌道飛行器RCS總共配置了30個噴管。
由于RCS開啟后噴管產生的推力大小無法調整,噴管產生的反作用力可描述為:

式中:Fi為噴管i產生的推力;FRCS為噴管的反作用推力;U為噴管的開關指令(1表示開,0表示關)。
RCS產生的三通道控制力矩可以根據噴管產生的推力和力臂確定:
式中:L,M,N分別為滾轉、俯仰和偏航通道RCS產生的力矩;dk,di,dj分別為滾轉、俯仰和偏航通道RCS噴管作用的力臂長度。
1.2 氣動舵控制模型
該亞軌道飛行器采用的控制舵面與美國航天飛機類似,具有升降舵、副翼、方向舵、體襟翼和減速板。升降舵通過面對稱偏轉實現亞軌道飛行器的俯仰運動;副翼對稱安裝在機翼后緣外側,它們通過非對稱的偏轉來實現飛行器的偏航與滾轉運動;方向舵用來操縱亞軌道飛行器的航向運動。由于減速板只在能量管理段工作,且工作時方向舵無效,體襟翼用于迎角配平,本文在研究時暫不考慮減速板和體襟翼的工作。
記副翼、升降舵和方向舵的偏轉角分別為δa,δe和δr。氣動舵面的偏轉角與其產生的控制力矩之間的關系可用數學函數表示為[3]:

飛行器控制系統在任務剖面中的工作分配如表1所示。
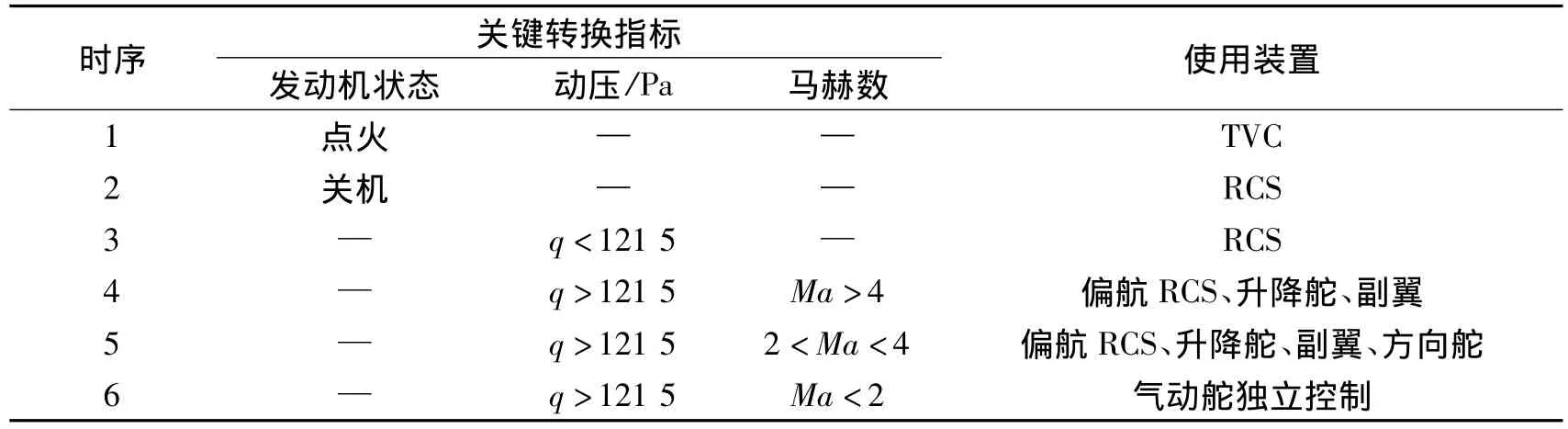
表1 執行機構的工作分配Table1 Distribution of actuator
進入復合控制階段,偏航通道存在由RCS操縱向氣動舵面操縱過渡的問題,可利用橋接函數來表示其操縱方式[4]:
2 故障模式
2.1 RCS故障
為了滿足亞軌道飛行器控制任務的需要,RCS系統中配置的推力器噴管數量較多。常見情況如噴管無法打開、噴管堵塞或者噴管無法關閉等多種原因,都會導致反作用控制系統出現問題,因此RCS故障發生幾率非常高。RCS故障模式主要分為噴管失效(RCS零推力)和噴管常開。當噴管常開時會產生恒定推力,直至推進劑耗盡[5]。
為了便于仿真分析,本文暫時只考慮噴管失效情況。當多個噴管發生故障時,需根據故障噴管的不同組合分別計算每個通道的控制力矩。由于噴管數量較多,故障組合復雜,因此仿真過程中故障情況下俯仰、偏航和滾轉通道的RCS控制力矩可分別用下面的數學函數近似計算:
式中:L',M',N'分別為故障狀態下滾轉、俯仰和偏航通道的控制力矩;nk,ni和nj分別為三個通道的噴管個數;mk,mi和 mj分別為各通道的故障噴管個數。
2.2 氣動舵故障
亞軌道飛行器的操縱舵面故障主要分為舵面失效(氣動舵無輸出)、舵面卡死在某個角度以及舵面積損失三種情況。為了限定研究范圍,假設舵面故障只對飛行器的氣動特性造成影響。要計算舵面故障下的氣動特性,必須根據故障類型改變舵面偏轉位置約束或折算為舵面損傷率,以反映故障對氣動性能造成的影響。
對于需要改變舵面偏轉位置約束的舵面故障仿真,考慮在正常飛行狀態的基礎上加入故障情況,可以用以下函數式表示:

式中:δt為正常情況下的舵偏角;kc為氣動舵故障系數;δc為氣動舵故障參數。故障系數kc在正常狀況下取1,發生故障時取0。
舵面失效主要表現為氣動舵面隨氣流浮動喪失了產生氣動力矩的能力,其對各軸的操縱力矩貢獻為零。因此當氣動舵失效時,式(6)中的故障參數δc=0。
氣動舵卡死時,舵面被固定在某一偏角,對操縱指令無響應。在特定馬赫數和迎角下,卡死舵面對各軸產生的操縱力矩固定不變,對各軸的操縱力矩只隨馬赫數和迎角改變。當氣動舵卡死時,式(6)中氣動舵故障參數δc為卡死時的當前舵偏角。
舵面積損失主要是由于熱燒蝕或者其他原因造成的。在這種情況下,舵面仍具備產生操縱力矩的能力,但能力降低。具體到不同的故障舵面,損傷部位和程度都會不同。為了方便研究,將舵面的各種損傷形式都折算為對應于舵面氣動系數的損傷率k%。飛行器在舵面損傷時的數學模型與正常狀態存在很大不同,可以利用已有的飛行器正常氣動數據C0和舵面完全損傷100%的氣動數據Ct,推導出舵面損傷k%時氣動系數Ck的插值計算公式:

結合氣動力和力矩計算公式,可得到帶有舵面損傷故障的亞軌道飛行器氣動模型。
3 仿真結果及分析
本文以某型與上面級火箭采用并聯式布局的亞軌道飛行器為例建立六自由度仿真模型,基于西北工業大學空天飛行器實驗室開發的OpenFlight數字仿真平臺進行故障仿真。飛行器從地面垂直發射,利用火箭發動機爬高進入亞軌道釋放上面級飛行器,完成任務后無動力再入并水平著陸。
3.1 RCS零推力
仿真條件:在300 s前亞軌道飛行器處于RCS獨立控制階段;在300 s時,飛行器RCS中滾轉控制噴管均出現噴管失效。圖1~圖3為仿真得到的RCS零推力故障與正常狀態的飛行姿態角變化曲線。
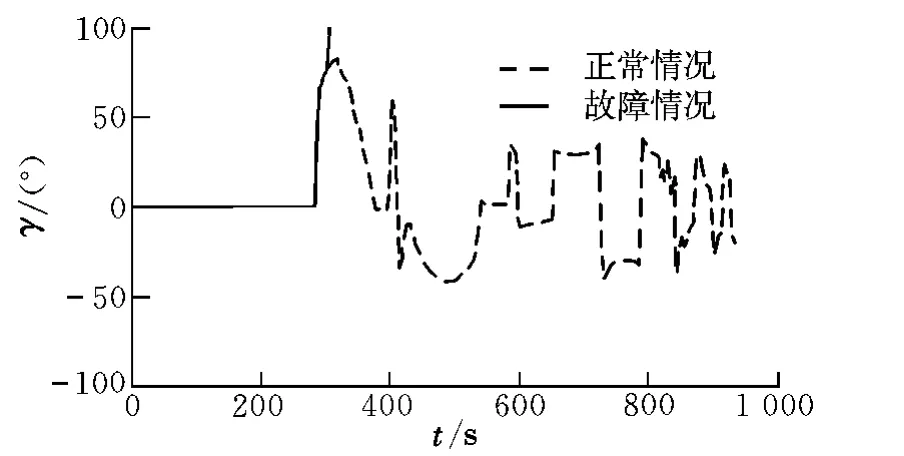
圖1 滾轉角變化曲線Fig.1 Variation of roll angle
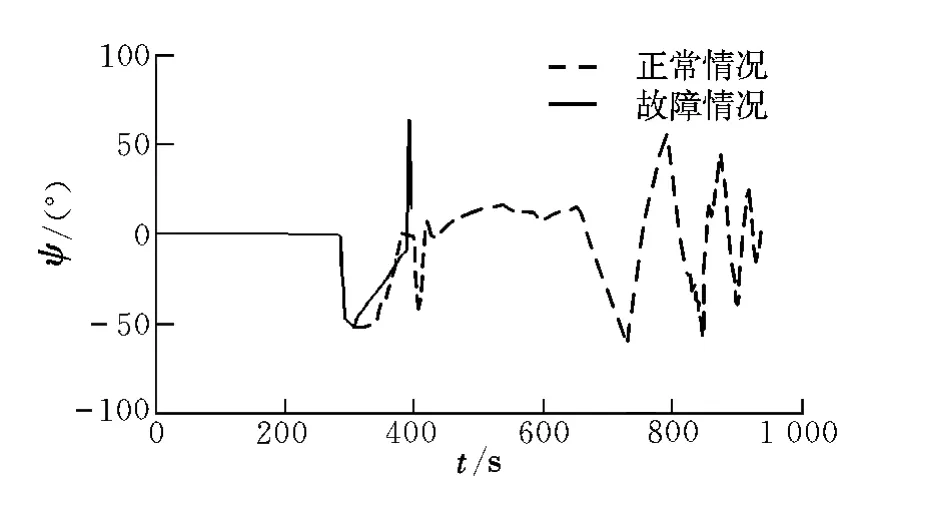
圖2 偏航角變化曲線Fig.2 Variation of yaw angle
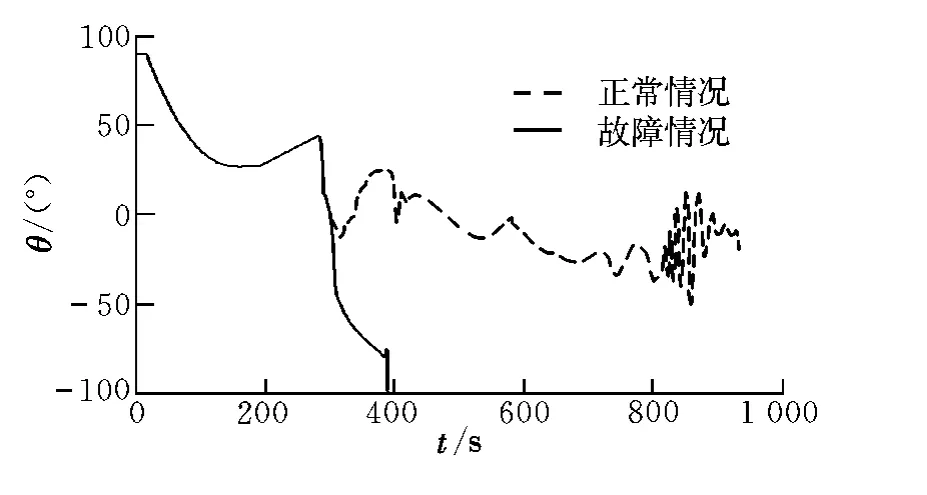
圖3 俯仰角變化曲線Fig.3 Variation of pitch angle
從圖1可以看出,故障發生后飛行器滾轉控制能力減弱,滾轉角增大到一定程度后,因滾轉力矩不足無法按指令減小,偏離其正常范圍,飛行姿態變化劇烈。
由圖2和圖3可以看出,滾轉姿態變化導致了偏航角和俯仰角的嚴重偏離,說明飛行器姿態失去控制。
3.2 舵面失效
仿真條件:亞軌道飛行器的氣動舵在700 s時發生副翼失效故障。仿真得到的舵面正常模式和副翼失效的姿態角變化曲線如圖4~圖6所示。
飛行器飛行到605 s時馬赫數減小到2,復合控制階段結束,氣動舵獨立控制。副翼通過非對稱的偏轉來實現飛行器的偏航與滾轉運動,因此副翼無輸出后滾轉通道失去控制能力。從圖4可以看出,滾轉角在極短時間內出現異常并超出正常范圍。由于副翼與方向舵協同控制偏航運動,從圖5可以看出,航向力矩不足導致故障發生后一段時間內偏航角在-25°附近漂移。從圖6可以看出,受到滾轉與偏航運動的影響,俯仰角變化非常劇烈。
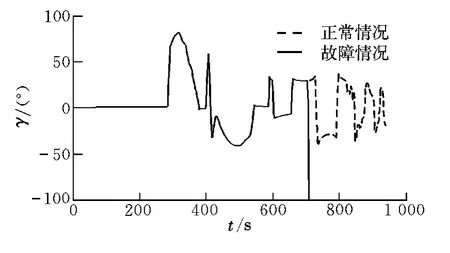
圖4 滾轉角變化曲線Fig.4 Variation of roll angle
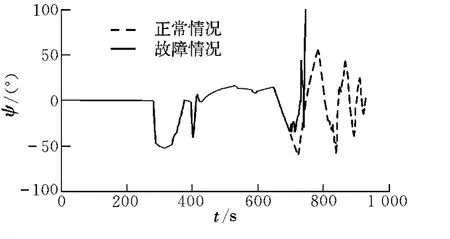
圖5 偏航角變化曲線Fig.5 Variation of yaw angle
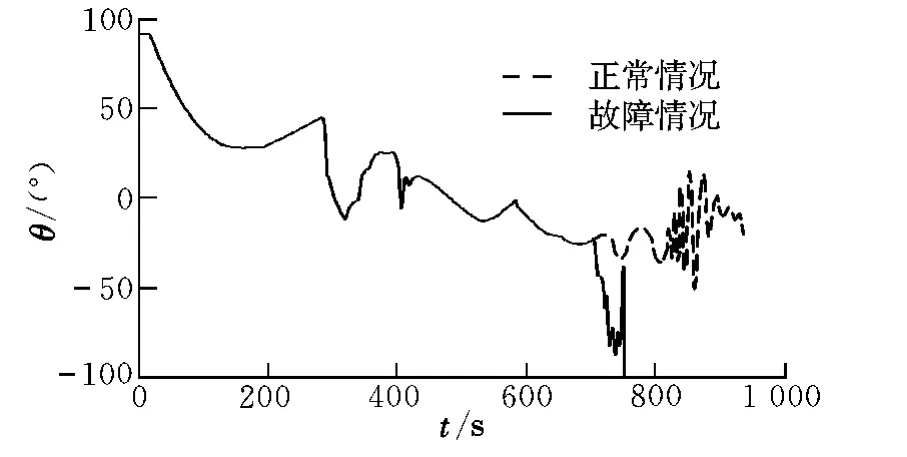
圖6 俯仰角變化曲線Fig.6 Variation of pitch angle
由仿真結果可知,飛行器姿態失去控制,說明氣動舵獨立控制階段副翼失效對亞軌道飛行器返回過程影響極為嚴重。
4 結束語
本文以亞軌道飛行器再入過程中的執行機構為研究對象,在分析故障模式的基礎上建立了六自由度仿真模型,并對典型故障進行了仿真。仿真結果表明,RCS及氣動舵故障會在很大程度上影響飛行器的控制能力,情況嚴重時還可能導致飛行任務失敗。本文僅針對RCS零推力故障及副翼失效進行了仿真分析,由于亞軌道飛行器故障出現有很大的隨機性,在后續研究中還需詳細討論舵面卡死、受損等各種情況以及多種故障同時發生時對飛行器飛行能力的影響。
[1] Martin JC,Law G W.Suborbital reusable launch vehicles and applicable market[R].The Aerospace Corporation Report,2002.
[2] Bennett D E.Space shuttle entry flight control overview[J].Journal of Astronautics Science,1983,31(2):569-578.
[3] 張寶恒.重復使用運載器 GNC系統虛擬樣機設計[D].西安:西北工業大學,2005.
[4] Costa da R R,Chu Q P,Mulder J A.Reentry flight controller design using nonlinear dynamic inversion [J].Journal of Spacecraft and Rockets,2003,40(1):64-71.
[5] 張宗美.航天故障手冊[M].北京:宇航出版社,1994:226-530.
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(2016年4期)2016-06-01 12:10:19
電測與儀表(2016年5期)2016-04-22 01:13:50
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年8期)2015-04-17 03:32:52
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年7期)2015-04-17 02:12:40
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39
