有人機(jī)/無(wú)人機(jī)協(xié)同空戰(zhàn)效能評(píng)估的綜合指數(shù)模型
2014-12-25 09:21:36董彥非崔巍張旺
飛行力學(xué) 2014年5期
關(guān)鍵詞:能力
董彥非,崔巍,張旺
(南昌航空大學(xué)飛行器工程學(xué)院,江西南昌330063)
0 引言
隨著航空科技的發(fā)展與軍事需求的推動(dòng),無(wú)人機(jī)在戰(zhàn)場(chǎng)上的應(yīng)用范圍已經(jīng)逐漸從監(jiān)視/偵察向空中作戰(zhàn)方向發(fā)展[1-3]。無(wú)人作戰(zhàn)飛機(jī)(以下簡(jiǎn)稱無(wú)人機(jī))不僅能在未來(lái)戰(zhàn)場(chǎng)上與有人戰(zhàn)斗機(jī)(以下簡(jiǎn)稱有人機(jī))并肩作戰(zhàn),甚至能在某些情況下替代有人機(jī),成為未來(lái)空中作戰(zhàn)的主力武器裝備之一。人在環(huán)的無(wú)人作戰(zhàn)模式將成為未來(lái)空中作戰(zhàn)的重要模式[4],無(wú)人戰(zhàn)斗機(jī)將逐漸主導(dǎo)空中作戰(zhàn),成為空中優(yōu)勢(shì)的主力軍。
受限于無(wú)人機(jī)的智能化水平,在未來(lái)相當(dāng)長(zhǎng)的一段時(shí)間內(nèi),有人機(jī)和無(wú)人機(jī)在空中作戰(zhàn)中的關(guān)系仍將是控制與被控制以及功能互補(bǔ)的關(guān)系。美國(guó)國(guó)防部認(rèn)為,未來(lái)有人機(jī)和無(wú)人機(jī)及其他無(wú)人支援飛機(jī)聯(lián)合編隊(duì)協(xié)同作戰(zhàn)將成為一種新的作戰(zhàn)模式[5-7]。有人機(jī)和無(wú)人機(jī)協(xié)同作戰(zhàn),可以做到優(yōu)勢(shì)互補(bǔ),分工協(xié)作,充分發(fā)揮各自的能力。無(wú)人機(jī)的出現(xiàn)必將會(huì)引起空中作戰(zhàn)理論的變革[1],導(dǎo)致空中作戰(zhàn)方式的改變。當(dāng)前,無(wú)人機(jī)與有人機(jī)協(xié)同作戰(zhàn)的模式已成為無(wú)人機(jī)作戰(zhàn)運(yùn)用研究中的一大熱點(diǎn),引起了世界各國(guó)極大的研究興趣[1]。
1 典型作戰(zhàn)模式
有人機(jī)/無(wú)人機(jī)混合編隊(duì)由1架到數(shù)架有人機(jī)作為長(zhǎng)機(jī),每架長(zhǎng)機(jī)分別指揮控制2~4架無(wú)人機(jī)編隊(duì)完成任務(wù)。在混合編隊(duì)中,長(zhǎng)機(jī)具有完善的指揮控制功能和對(duì)空作戰(zhàn)能力,主要完成對(duì)無(wú)人機(jī)的指揮控制任務(wù),在作戰(zhàn)需要情況下,長(zhǎng)機(jī)也可以對(duì)敵機(jī)實(shí)施攻擊。僚機(jī)具有良好的協(xié)同空戰(zhàn)能力(自主控制等級(jí)≥美國(guó)無(wú)人機(jī)智能評(píng)級(jí)的第5級(jí)——機(jī)群協(xié)同)。協(xié)同空戰(zhàn)示意圖如圖1所示。
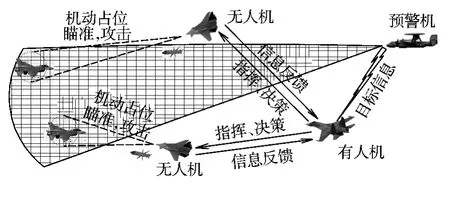
圖1 有人機(jī)/無(wú)人機(jī)協(xié)同空戰(zhàn)示意圖Fig.1 Cooperation of manned/unmanned vehicles in air combat
1.1 協(xié)同空戰(zhàn)過(guò)程
協(xié)同空戰(zhàn)過(guò)程共分為6個(gè)階段,其流程如圖2所示。

圖2 有人機(jī)/無(wú)人機(jī)協(xié)同空戰(zhàn)流程Fig.2 Cooperation of manned/unmanned vehicles in air combat
1.1.1 任務(wù)裝訂及戰(zhàn)區(qū)引導(dǎo)
指揮控制中心接受上級(jí)命令截?fù)裟晨沼蛉肭帜繕?biāo)并對(duì)情報(bào)進(jìn)行分析后,決定使用1架有人機(jī)為長(zhǎng)機(jī),3架無(wú)人機(jī)為僚機(jī)執(zhí)行截?fù)羧蝿?wù)。
有人機(jī)/無(wú)人機(jī)在地面進(jìn)行任務(wù)/路徑的數(shù)據(jù)裝訂后,根據(jù)指揮控制中心的命令起飛,到達(dá)指定空域集結(jié)、編隊(duì)。然后,指揮控制中心將混合編隊(duì)引導(dǎo)至預(yù)定空域。有人機(jī)位于無(wú)人機(jī)機(jī)群后方30~50 km處,接收由無(wú)人機(jī)、預(yù)警指揮控制中心傳來(lái)的實(shí)時(shí)戰(zhàn)場(chǎng)數(shù)據(jù),指揮控制無(wú)人機(jī)機(jī)群。
1.1.2 戰(zhàn)場(chǎng)偵察和目標(biāo)搜索
混合編隊(duì)到達(dá)預(yù)定空域后,根據(jù)敵機(jī)目標(biāo)的大致方位和距離等信息,有人機(jī)指揮無(wú)人機(jī)沿規(guī)劃戰(zhàn)術(shù)航線編隊(duì)飛行,無(wú)人機(jī)編隊(duì)雷達(dá)開(kāi)機(jī)對(duì)戰(zhàn)場(chǎng)進(jìn)行偵察,搜索敵機(jī)目標(biāo)。
無(wú)人機(jī)將獲得的戰(zhàn)場(chǎng)態(tài)勢(shì)信息通過(guò)數(shù)據(jù)鏈系統(tǒng)傳輸給有人機(jī),有人機(jī)實(shí)時(shí)接收由無(wú)人機(jī)、預(yù)警指揮控制中心傳來(lái)的實(shí)時(shí)戰(zhàn)場(chǎng)數(shù)據(jù),控制無(wú)人機(jī)對(duì)指定區(qū)域的目標(biāo)搜索。
當(dāng)無(wú)人機(jī)搜索到可疑目標(biāo)后,自動(dòng)進(jìn)行敵我識(shí)別過(guò)程。當(dāng)確認(rèn)是敵機(jī)后,將敵機(jī)信息通過(guò)數(shù)據(jù)鏈系統(tǒng)傳輸給有人機(jī)。
1.1.3 攻擊準(zhǔn)備(戰(zhàn)場(chǎng)數(shù)據(jù)信息處理)
有人機(jī)綜合無(wú)人機(jī)、預(yù)警指揮控制中心和本機(jī)的情報(bào),實(shí)時(shí)進(jìn)行空戰(zhàn)態(tài)勢(shì)評(píng)估和威脅評(píng)估,并進(jìn)行目標(biāo)分配和火力分配,然后將分配結(jié)果通過(guò)數(shù)據(jù)鏈系統(tǒng)傳輸給無(wú)人機(jī)。無(wú)人機(jī)完成對(duì)威脅目標(biāo)實(shí)施超視距(BVR)攻擊占位。同時(shí),有人機(jī)將評(píng)估結(jié)果傳輸給指揮控制中心。
本階段結(jié)束時(shí),無(wú)人機(jī)編隊(duì)具備執(zhí)行BVR攻擊的條件。該階段有人機(jī)主要任務(wù)有:接收各方情報(bào)信息,進(jìn)行信息融合,完成態(tài)勢(shì)分析、威脅評(píng)估等,并對(duì)無(wú)人機(jī)群進(jìn)行目標(biāo)分配和火力分配,將分配結(jié)果以命令形式發(fā)送給無(wú)人機(jī);指揮控制無(wú)人機(jī)對(duì)威脅目標(biāo)實(shí)施BVR攻擊占位;對(duì)戰(zhàn)場(chǎng)進(jìn)行監(jiān)視。無(wú)人機(jī)主要任務(wù)有:基于機(jī)載或外部信息跟蹤威脅目標(biāo)、繼續(xù)搜索潛在威脅目標(biāo);對(duì)威脅目標(biāo)實(shí)施BVR攻擊占位。
1.1.4 超視距攻擊
有人機(jī)下達(dá)超視距攻擊指令。無(wú)人機(jī)判斷敵機(jī)是否進(jìn)入中距攻擊包線。當(dāng)敵機(jī)進(jìn)入無(wú)人機(jī)的中/遠(yuǎn)距空空導(dǎo)彈發(fā)射包線后,無(wú)人機(jī)完成火控諸元解算,進(jìn)入第一輪BVR導(dǎo)彈攻擊。
該階段有人機(jī)的主要任務(wù)是進(jìn)行戰(zhàn)場(chǎng)監(jiān)視。無(wú)人作戰(zhàn)飛機(jī)的主要任務(wù)為:判斷敵機(jī)是否進(jìn)入中距攻擊包線,完成火控諸元結(jié)算;實(shí)施攻擊。
1.1.5 再次BVR/視距內(nèi)(WVR)攻擊
首輪BVR攻擊后,有人機(jī)需進(jìn)行如下判斷:如果敵機(jī)群被殲滅,則轉(zhuǎn)入返回基地;如果未全部殲滅敵方機(jī)群,有人機(jī)則要根據(jù)敵我雙方的戰(zhàn)損情況判斷是否實(shí)施再次攻擊。如果需要再次攻擊,有人機(jī)再次進(jìn)行目標(biāo)分配和火力分配,并下達(dá)攻擊指令后,無(wú)人機(jī)進(jìn)入再次攻擊階段。如果作戰(zhàn)需要,有人機(jī)也可以進(jìn)入攻擊行動(dòng)。
1.1.6 返回基地
經(jīng)過(guò)BVR攻擊或再次攻擊/WVR攻擊之后,有人機(jī)分別向無(wú)人機(jī)下達(dá)返航指令,指揮剩余無(wú)人機(jī)集結(jié)編隊(duì)并按照預(yù)定航路返回基地。
1.2 協(xié)同作戰(zhàn)特點(diǎn)
根據(jù)典型的有人機(jī)/無(wú)人機(jī)混合編隊(duì)協(xié)同空戰(zhàn)模式可知,與有人機(jī)或者無(wú)人機(jī)單機(jī)空戰(zhàn)效能評(píng)估相比,有人機(jī)和無(wú)人機(jī)協(xié)同的機(jī)群效能具有以下特點(diǎn):
(1)有人機(jī)指揮控制能力的重要性突出;
(2)無(wú)人機(jī)自主智能有重要影響;
(3)對(duì)數(shù)據(jù)鏈系統(tǒng)抗干擾和穩(wěn)定性有較高要求;
(4)機(jī)群中飛機(jī)數(shù)量與整體作戰(zhàn)能力正相關(guān);
(5)多機(jī)協(xié)同會(huì)降低單機(jī)能力優(yōu)勢(shì)。
基于以上特點(diǎn),混合機(jī)群效能評(píng)估可以考慮構(gòu)建基于各能力之間相關(guān)性的加權(quán)和模型。模型中的有人機(jī)能力除了常規(guī)戰(zhàn)斗機(jī)的評(píng)估方法外,注重指揮和控制能力相關(guān)參數(shù)在模型中的突出體現(xiàn)。無(wú)人機(jī)能力中的智能化程度需要重點(diǎn)考慮,要特別重視數(shù)據(jù)鏈的能力。
2 空戰(zhàn)效能評(píng)估指數(shù)模型
根據(jù)有人機(jī)/無(wú)人機(jī)協(xié)同空戰(zhàn)典型作戰(zhàn)模式知,有人機(jī)的指揮控制能力與無(wú)人機(jī)的自主智能(智能化水平)相關(guān),數(shù)據(jù)鏈能力與有人機(jī)的指揮控制能力相關(guān),而起輔助攻擊作用的有人機(jī)單機(jī)空戰(zhàn)能力與以上能力無(wú)相關(guān)性。由此,建立有人機(jī)/無(wú)人機(jī)混合編隊(duì)協(xié)同空戰(zhàn)能力數(shù)學(xué)模型為:
2016年和2017年水稻季各處理平均滲漏量分別為220.3 mm和169.7 mm,2016年水稻季比2017年多50.6 mm。一是因?yàn)榻涤贻^多,田面水層長(zhǎng)時(shí)間維持在較高水平,下滲速率較大;二是經(jīng)過(guò)2016年水稻季的種植,2017年水稻季試驗(yàn)小區(qū)耕作層的致密性較2016年好,下滲速率減弱。從不同灌溉模式來(lái)看,W1模式的滲漏量明顯小于W0模式,特別是降雨較少的2017年水稻季。在田間沒(méi)有水層或土壤含水率較低的情況下滲漏量明顯減少。

式中:DL為編隊(duì)系統(tǒng)數(shù)據(jù)鏈能力;ACC為有人機(jī)指揮決策能力;IUAV為無(wú)人機(jī)自主智能;CM為有人機(jī)空戰(zhàn)能力;CUAV為無(wú)人機(jī)空戰(zhàn)能力;n和m分別為混合編隊(duì)中無(wú)人機(jī)和有人機(jī)的數(shù)量;η為飛機(jī)數(shù)量對(duì)單機(jī)效能的影響因素(當(dāng)我方飛機(jī)總數(shù)為2時(shí),η=1;當(dāng)我方飛機(jī)總數(shù)為3時(shí),η=0.9;當(dāng)我方飛機(jī)總數(shù)為4時(shí),η=0.8)。式(1)中各分項(xiàng)能力指數(shù)上邊的“_”號(hào)表示進(jìn)行標(biāo)準(zhǔn)化處理(以下同),并以此值作為該項(xiàng)指標(biāo)的指數(shù)值。基于對(duì)武器裝備性能參數(shù)物理意義上的考慮[8-11],標(biāo)準(zhǔn)化可以采用非線性S型可導(dǎo)函數(shù)歸一法。
有人機(jī)單機(jī)空戰(zhàn)能力包括:火力、態(tài)勢(shì)感知能力、機(jī)動(dòng)能力、操縱性、生存力(含電子對(duì)抗能力)和作戰(zhàn)半徑。如果把“火力×態(tài)勢(shì)感知能力”看作一個(gè)單項(xiàng)Att(衡量攻擊能力),把“機(jī)動(dòng)能力×操縱能力”作為一個(gè)單項(xiàng)Mane(衡量機(jī)動(dòng)性),Sur表示生存能力,Radius表示續(xù)航能力,則有人機(jī)和無(wú)人機(jī)的單機(jī)空戰(zhàn)能力都可以表示為[9]:

有人機(jī)和無(wú)人機(jī)單機(jī)作戰(zhàn)能力中武器系統(tǒng)能力、作戰(zhàn)飛機(jī)生存力、電子對(duì)抗能力系數(shù)εe、機(jī)動(dòng)性以及其他未說(shuō)明的參數(shù)計(jì)算與取值方法均可參見(jiàn)文獻(xiàn)[8-13],并根據(jù)現(xiàn)代作戰(zhàn)實(shí)際和空戰(zhàn)攻擊武器形態(tài)的發(fā)展合理修正。
數(shù)據(jù)鏈的性能是對(duì)平時(shí)和戰(zhàn)時(shí)運(yùn)用環(huán)境條件下數(shù)據(jù)鏈發(fā)揮的戰(zhàn)術(shù)信息采集、數(shù)據(jù)處理能力的度量;或者說(shuō)是衡量數(shù)據(jù)鏈將規(guī)定的戰(zhàn)術(shù)信息,在規(guī)定的時(shí)間按照規(guī)定的收發(fā)規(guī)則,以規(guī)定的信息格式發(fā)送到規(guī)定的地方,并采用規(guī)定的算法在規(guī)定的時(shí)間內(nèi)完成對(duì)戰(zhàn)術(shù)數(shù)據(jù)處理的能力。數(shù)據(jù)鏈性能指數(shù)DL可以由節(jié)點(diǎn)連通性、有效網(wǎng)絡(luò)容量、時(shí)效指標(biāo)最終體現(xiàn)。

式中:nr為接收節(jié)點(diǎn)數(shù)目;nt為發(fā)送節(jié)點(diǎn)數(shù)目;Mt為節(jié)點(diǎn)發(fā)送的消息;Mr為節(jié)點(diǎn)接收的消息;Qeff為有效數(shù)據(jù)傳輸速率;tp為單位傳播時(shí)間;pi為第i條信息傳遞的時(shí)效性的度量。
有人機(jī)的指揮控制能力可表示為:

式中:α為接收信息中正確發(fā)現(xiàn)的目標(biāo)數(shù)量;α0為客觀態(tài)勢(shì)中實(shí)際的目標(biāo)數(shù)量,則α/α0可表征為信息完備性指標(biāo);Vi為接收信息中的單個(gè)目標(biāo)特征與客觀態(tài)勢(shì)中相應(yīng)目標(biāo)特征的偏離程度,即(1-Vi)為單個(gè)目標(biāo)感知態(tài)勢(shì)的準(zhǔn)確性指標(biāo);qi為作戰(zhàn)需求時(shí)限內(nèi)信息處理融合的時(shí)效性;εj為第j個(gè)從決策作戰(zhàn)行動(dòng)采取后實(shí)際完成任務(wù)的程度;tj為單個(gè)任務(wù)決策周期;tmax為決策允許時(shí)間。
3 算例與分析
設(shè)有10種型號(hào)的有人機(jī)(M1,…,M10)和7種型號(hào)的無(wú)人機(jī)(U1,…,U7)均可以混合編隊(duì)。混合編隊(duì)由1架有人機(jī)指揮控制3架無(wú)人機(jī)實(shí)施空戰(zhàn)任務(wù)。
首先分別計(jì)算出有人機(jī)和無(wú)人機(jī)單機(jī)作戰(zhàn)效能;然后,計(jì)算出各有人機(jī)指揮控制能力和數(shù)據(jù)鏈能力,以及無(wú)人機(jī)自主智能水平;最后評(píng)估混合編隊(duì)協(xié)同空戰(zhàn)效能。計(jì)算結(jié)果分別如表1~表3所示。

表1 有人機(jī)單機(jī)空戰(zhàn)效能評(píng)估結(jié)果Table 1 Results of air combat effectiveness for manned vehicles

表2 無(wú)人機(jī)單機(jī)空戰(zhàn)效能評(píng)估結(jié)果Table 2 Results of air combat effectiveness for UCAVs
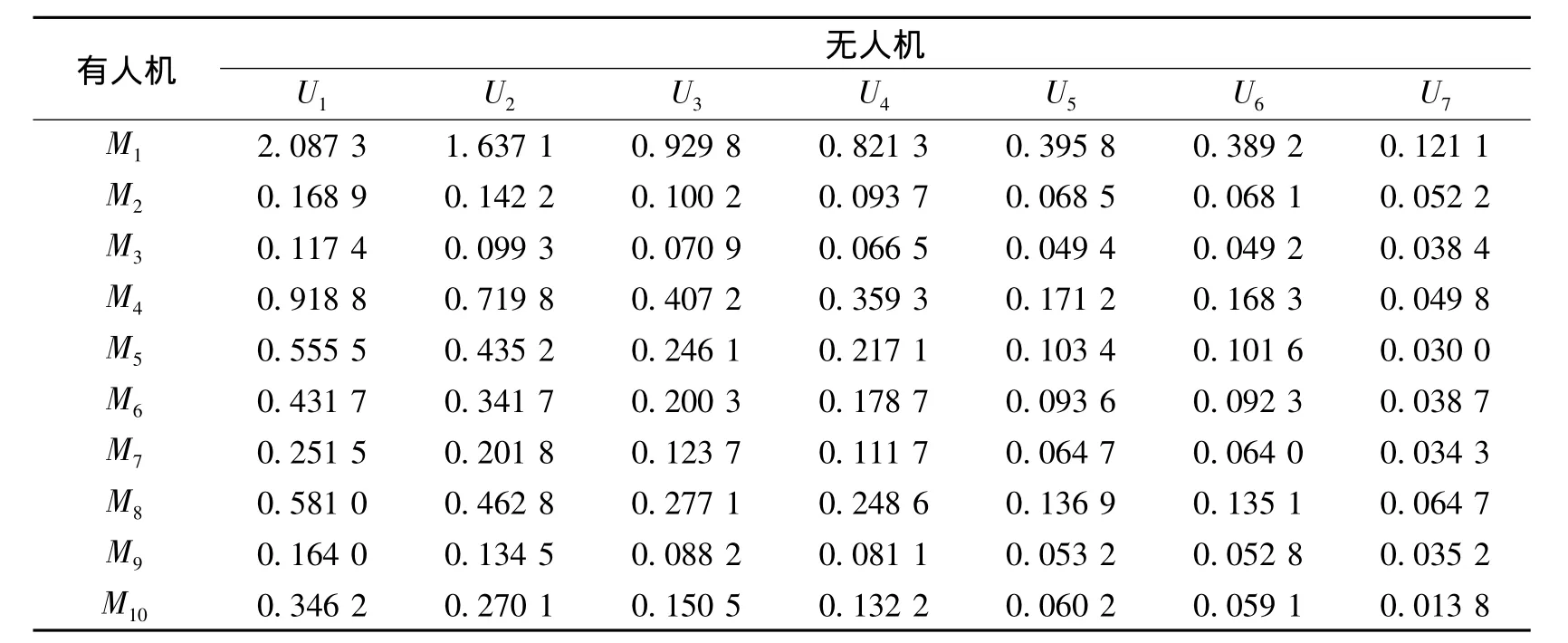
表3 不同混合編隊(duì)方案綜合空戰(zhàn)效能評(píng)估結(jié)果Table 3 Assessment results of air combat effectiveness for different mixed formations
表3中數(shù)值為1架有人機(jī)指揮控制3架無(wú)人機(jī)的空戰(zhàn)效能評(píng)估結(jié)果(如M1,U1對(duì)應(yīng)的2.087 3即為1架M1指揮控制3架U1的空戰(zhàn)效能值)。根據(jù)計(jì)算結(jié)果可知:
(1)M1的單機(jī)綜合作戰(zhàn)能力、指揮控制能力、數(shù)據(jù)鏈效能都是最大的,與7架無(wú)人機(jī)中的任意一架配對(duì),都取得了較高的編隊(duì)協(xié)同空戰(zhàn)效能。
(2)M4有良好的指揮控制能力和數(shù)據(jù)鏈能力,使得M4與其他無(wú)人機(jī)相配能取得較好的作戰(zhàn)效能。
(3)M3與M4作戰(zhàn)能力、數(shù)據(jù)鏈效能接近,但M3的指揮控制能力很弱,使得M3與其他無(wú)人機(jī)相配的作戰(zhàn)效能很低。
(4)M6與M7的空戰(zhàn)能力、指揮控制能力接近,但M7的數(shù)據(jù)鏈效能比較低,使得M7與其他無(wú)人機(jī)相配的作戰(zhàn)效能都低于M6與其他無(wú)人機(jī)相配的作戰(zhàn)效能。
(5)U1和U2性能優(yōu)良,與多數(shù)有人機(jī)進(jìn)行編隊(duì)空戰(zhàn)都能達(dá)到理想的攻擊效果;U7的單機(jī)綜合作戰(zhàn)能力和自主控制能力都是最低的,因而它與有人機(jī)中任意一架配對(duì)的空戰(zhàn)效能都是最低的。
(6)有人機(jī)的作用主要為飛機(jī)編隊(duì)提供指揮控制作用,其單機(jī)作戰(zhàn)能力對(duì)混合編隊(duì)效能影響不如指揮控制能力的影響。有人機(jī)/無(wú)人機(jī)混合編隊(duì)空戰(zhàn)能力的大小主要取決于無(wú)人機(jī)的單機(jī)作戰(zhàn)效能和自主智能。
4 結(jié)論
(1)有人機(jī)/無(wú)人機(jī)混合編隊(duì)協(xié)同空戰(zhàn)效能評(píng)估的綜合指數(shù)模型較好地處理了有人機(jī)/無(wú)人機(jī)協(xié)同作戰(zhàn)各子系統(tǒng)、分系統(tǒng)能力之間的關(guān)系,經(jīng)計(jì)算驗(yàn)證,模型合理、可行,符合協(xié)同作戰(zhàn)的規(guī)律和數(shù)學(xué)原理。
(2)有人機(jī)/無(wú)人機(jī)協(xié)同空戰(zhàn)效能評(píng)估的綜合指數(shù)模型提供了合理的構(gòu)建混合編隊(duì)空戰(zhàn)效能評(píng)估的思想和基礎(chǔ)模型。在實(shí)際應(yīng)用中,應(yīng)在該建模思想指導(dǎo)下,綜合考慮具體可獲得的各項(xiàng)數(shù)據(jù)情況,并結(jié)合參數(shù)敏感性分析以及課題任務(wù)等因素合理調(diào)整具體的計(jì)算模型。
(3)給出的有人機(jī)/無(wú)人機(jī)協(xié)同空戰(zhàn)效能評(píng)估數(shù)據(jù)和計(jì)算結(jié)果只用于計(jì)算模型的驗(yàn)證,僅供參考。具體使用時(shí)可以根據(jù)研究目的不同選擇不同機(jī)型的集合,從不同角度運(yùn)用該指數(shù)模型。
[1] 龍濤.多無(wú)人機(jī)協(xié)同任務(wù)控制中分布式任務(wù)分配與任務(wù)協(xié)調(diào)技術(shù)研究[D].長(zhǎng)沙:國(guó)防科學(xué)技術(shù)大學(xué),2006.
[2] Thomas J.Cooperative engagement:concept for a near team air-to-air unmanned combat aircraft system[R].Browning Lt.Col,USAF,2006.
[3] CC-Air-Izmir Wg Cdr J M Paige GBR AF.UAVs are set to mature[J].The Journal of the JAPCC,2006(3):1-3.
[4] 祝小平,周洲.作戰(zhàn)無(wú)人機(jī)的發(fā)展與展望[J].飛行力學(xué),2005,23(2):1-4.
[5] 閆曄.有人機(jī)/無(wú)人機(jī)協(xié)同中的交互控制技術(shù)研究[D].長(zhǎng)沙:國(guó)防科學(xué)技術(shù)大學(xué),2007.
[6] Cambone S A,Kriegr,Pace P,et al.Unmanned aircraft system roadmap 2005-2030[R].Office of the Secretary of Defense,Washington DC,2005.
[7] Wilson J R.Unmanned aerial vehicles get ready for prime time[J].Military and Aerospace Electronics,2009,20(7):35-41.
[8] 董彥非,王禮沅,張恒喜.戰(zhàn)斗機(jī)空戰(zhàn)效能評(píng)估的綜合指數(shù)模型[J].航空學(xué)報(bào),2006,27(6):1084-1087.
[9] 董彥非,王禮沅,張恒喜.空-地攻擊作戰(zhàn)效能評(píng)估的綜合指數(shù)模型[J].航空學(xué)報(bào),2007,28(6):1374-1377.
[10]董彥非,胡濤.戰(zhàn)斗機(jī)綜合作戰(zhàn)效能評(píng)估建模方法[J].火力與指揮控制,2012,37(2):9-11.
[11]董彥非,王禮沅,王卓健.基于空戰(zhàn)模式和AHP法的空戰(zhàn)效能評(píng)估模型[J].系統(tǒng)工程與電子技術(shù),2006,28(6):885-888.
[12]朱寶鎏,朱榮昌,熊笑非.作戰(zhàn)飛機(jī)效能評(píng)估[M].北京:航空工業(yè)出版社,2006:62-112.
[13]張恒喜,郭基聯(lián),董彥非,等.現(xiàn)代飛機(jī)效費(fèi)分析[M].北京:航空工業(yè)出版社,2007:18-43.
猜你喜歡
發(fā)明與創(chuàng)新(2022年30期)2022-10-03 08:40:56
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2022年6期)2022-06-05 06:50:58
意林(兒童繪本)(2020年2期)2021-01-07 02:12:04
動(dòng)漫星空(興趣百科)(2020年12期)2020-12-12 05:31:40
作文成功之路·小學(xué)版(2020年5期)2020-06-11 12:48:46
意林(兒童繪本)(2019年9期)2019-10-15 08:51:46
中國(guó)生殖健康(2019年10期)2019-01-07 01:21:14
人大建設(shè)(2018年6期)2018-08-16 07:23:10
新高考(英語(yǔ)進(jìn)階)(2018年1期)2018-04-18 14:00:11
文理導(dǎo)航·科普童話(2017年5期)2018-02-10 19:42:14
