基于脈沖優(yōu)化控制的軌道轉(zhuǎn)移修正
2014-12-25 09:21:24黃遠(yuǎn)燦陳冬方
飛行力學(xué) 2014年5期
黃遠(yuǎn)燦,陳冬方
(北京理工大學(xué)機(jī)電學(xué)院,北京100081)
0 引言
在空間飛行器軌道轉(zhuǎn)移任務(wù)中,飛行器受到導(dǎo)航誤差、軌道攝動(dòng)、推力誤差、入軌狀態(tài)誤差等各種誤差因素的影響,將會(huì)偏離設(shè)計(jì)軌道,無(wú)法準(zhǔn)確地按照設(shè)定的軌道達(dá)到目標(biāo)位置。尤其在遠(yuǎn)距離轉(zhuǎn)移時(shí),必須在軌道轉(zhuǎn)移機(jī)動(dòng)過(guò)程中進(jìn)行中途多次修正,從而使飛行器準(zhǔn)確到達(dá)目標(biāo)范圍。為了防止飛行器最終軌跡偏離目標(biāo)點(diǎn)太大,在飛行過(guò)程中要求實(shí)際軌跡逼近目標(biāo)軌跡,但因飛行器攜帶燃料質(zhì)量有限(即軌道機(jī)動(dòng)能力有限),所以軌道修正需要結(jié)合燃料和狀態(tài)誤差問(wèn)題,進(jìn)行綜合優(yōu)化控制。
針對(duì)軌道轉(zhuǎn)移或攔截的優(yōu)化控制問(wèn)題,一些國(guó)內(nèi)外學(xué)者已進(jìn)行了相關(guān)研究[1-7]。所應(yīng)用的優(yōu)化方法一般根據(jù)飛行器推進(jìn)方式進(jìn)行設(shè)計(jì)。一種為大推力脈沖控制,另一種為有限推力或小推力的連續(xù)型推進(jìn)方式。文獻(xiàn)[1]中設(shè)計(jì)了一種受限的二次型優(yōu)化脈沖控制,其方法主要以最小能量的指標(biāo)優(yōu)化控制軌道交會(huì)。文獻(xiàn)[2]將優(yōu)化能量的脈沖控制用于軌道攔截中。針對(duì)固定時(shí)間的軌道中段攔截問(wèn)題,文獻(xiàn)[3]設(shè)計(jì)了一種連續(xù)的二次型調(diào)節(jié)器優(yōu)化控制。針對(duì)深空軌道小推力優(yōu)化設(shè)計(jì),文獻(xiàn)[6]給出了基于偽光譜方法的有限推力軌道轉(zhuǎn)移優(yōu)化設(shè)計(jì)。上述文獻(xiàn)優(yōu)化控制指標(biāo)主要是針對(duì)能量最小化,但未對(duì)軌跡誤差指標(biāo)進(jìn)行優(yōu)化。如果在飛行任務(wù)中,對(duì)飛行軌道進(jìn)行適當(dāng)?shù)男拚罱K能減小飛行器與終端目標(biāo)的偏差。故對(duì)軌跡誤差的優(yōu)化控制,是值得繼續(xù)探討的問(wèn)題,本文主要考慮以大推力脈沖推進(jìn)系統(tǒng)進(jìn)行優(yōu)化控制。文獻(xiàn)[8]提出了一種固定時(shí)間間隔的二次型脈沖控制策略,其發(fā)展了離散二次型優(yōu)化方法設(shè)計(jì)調(diào)節(jié)器,簡(jiǎn)化控制器計(jì)算,使得工程應(yīng)用化加強(qiáng)。因此本文利用該方法進(jìn)行了軌道轉(zhuǎn)移優(yōu)化策略設(shè)計(jì)。
對(duì)于空間飛行器控制模型選擇,主要有用于近圓軌道交會(huì)控制的CW(Clohessy-Wiltshire)模型[9];用于橢圓軌道交會(huì)攔截控制的TH(Tschauner-Hempel)模型[10]。本文考慮地球非球形攝動(dòng)因素的影響,基于攝動(dòng)方法建立線性控制模型,通過(guò)控制使得跟蹤軌跡更接近于目標(biāo)軌跡。為方便計(jì)算,同時(shí)對(duì)控制模型進(jìn)行了簡(jiǎn)化。
為此,本文通過(guò)分析軌道轉(zhuǎn)移中各種誤差因素,利用攝動(dòng)法建立控制模型,考慮地球非球形攝動(dòng)因素建立目標(biāo)軌跡。然后綜合控制輸入和最小化狀態(tài)誤差的優(yōu)化指標(biāo),采用固定時(shí)間間隔的線性二次型離散脈沖優(yōu)化控制方法。最后,針對(duì)空間兩點(diǎn)位置的軌道轉(zhuǎn)移任務(wù),仿真驗(yàn)證了方法的有效性。
1 軌道轉(zhuǎn)移控制模型
1.1 問(wèn)題的數(shù)學(xué)描述
在空間飛行器軌道轉(zhuǎn)移運(yùn)行中,如果考慮轉(zhuǎn)移時(shí)間固定,則空間兩點(diǎn)之間存在一條飛行軌道。僅考慮空間飛行器與地球之間的運(yùn)動(dòng),那么可以簡(jiǎn)化為二體問(wèn)題模型,但實(shí)際運(yùn)行中飛行器受外部多種攝動(dòng)因素的影響,其中主要有地球非球形攝動(dòng)、日月引力、大氣阻力、太陽(yáng)光壓的影響。根據(jù)Cowell的攝動(dòng)力公式[11],系統(tǒng)方程如下:
式中:anon為地球非球形攝動(dòng);a3SL為日月引力攝動(dòng);aAD為大氣阻力;aSR為太陽(yáng)光壓;aoth為其他影響因素。
與此同時(shí),從現(xiàn)有的工程經(jīng)驗(yàn)可知,為了達(dá)到較好的控制目標(biāo),空間飛行器在實(shí)際飛行中還需要考慮飛行器自身的一些影響因素。如自身導(dǎo)航測(cè)量誤差、姿態(tài)控制發(fā)動(dòng)機(jī)、軌道控制發(fā)動(dòng)機(jī)的攝動(dòng)、入軌狀態(tài)誤差等各種誤差。通常將這類(lèi)誤差分為兩種:一種為常值偏差或量測(cè)值偏差,如慣導(dǎo)量測(cè)偏差;另一種為基于白噪聲的隨機(jī)干擾,如飛行器工作時(shí)發(fā)動(dòng)機(jī)的開(kāi)關(guān)機(jī)擾動(dòng)等。所以實(shí)際計(jì)算模型如下:

式中:athr為發(fā)動(dòng)機(jī)干擾;ab為量測(cè)偏差;aON為其他噪聲干擾。
對(duì)于部分已知的攝動(dòng)(如地球非球形攝動(dòng)等),在計(jì)算目標(biāo)軌道時(shí),可考慮列入目標(biāo)實(shí)際軌道求解,得出一條較為精確的目標(biāo)軌道。
對(duì)于控制方式,本文采用脈沖控制方式,即大推力脈沖式機(jī)動(dòng)轉(zhuǎn)移。發(fā)動(dòng)機(jī)在非常短暫的時(shí)間內(nèi)產(chǎn)生大推力,使空間飛行器獲得脈沖速度。

式中:r(t),r(t+τ)分別為脈沖控制前、后的位置;v(t),v(t+τ)分別為控制前、后的速度;Δv為速度變化量的大小。
1.2 控制系統(tǒng)模型
為方便控制策略的應(yīng)用,本文采用了線性控制模型。考慮軌道轉(zhuǎn)移的一般性,參照文獻(xiàn)[12]的攝動(dòng)制導(dǎo)方法,建立控制模型方程。
依據(jù)二體問(wèn)題模型,建立慣性地心坐標(biāo)系[13],系統(tǒng)模型方程如下:
假定以實(shí)際軌跡與目標(biāo)軌跡的狀態(tài)之差作為控制狀態(tài)變量,有:

其中:
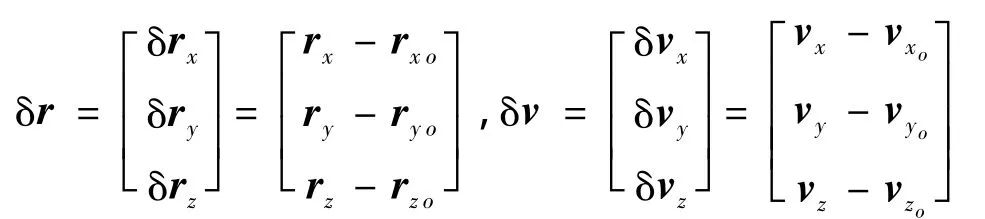
式中:r,v為實(shí)際位置和實(shí)際速度;ro,vo為目標(biāo)位置和目標(biāo)速度。
從上式線性化可得,系統(tǒng)方程可寫(xiě)為如下形式:

其中:
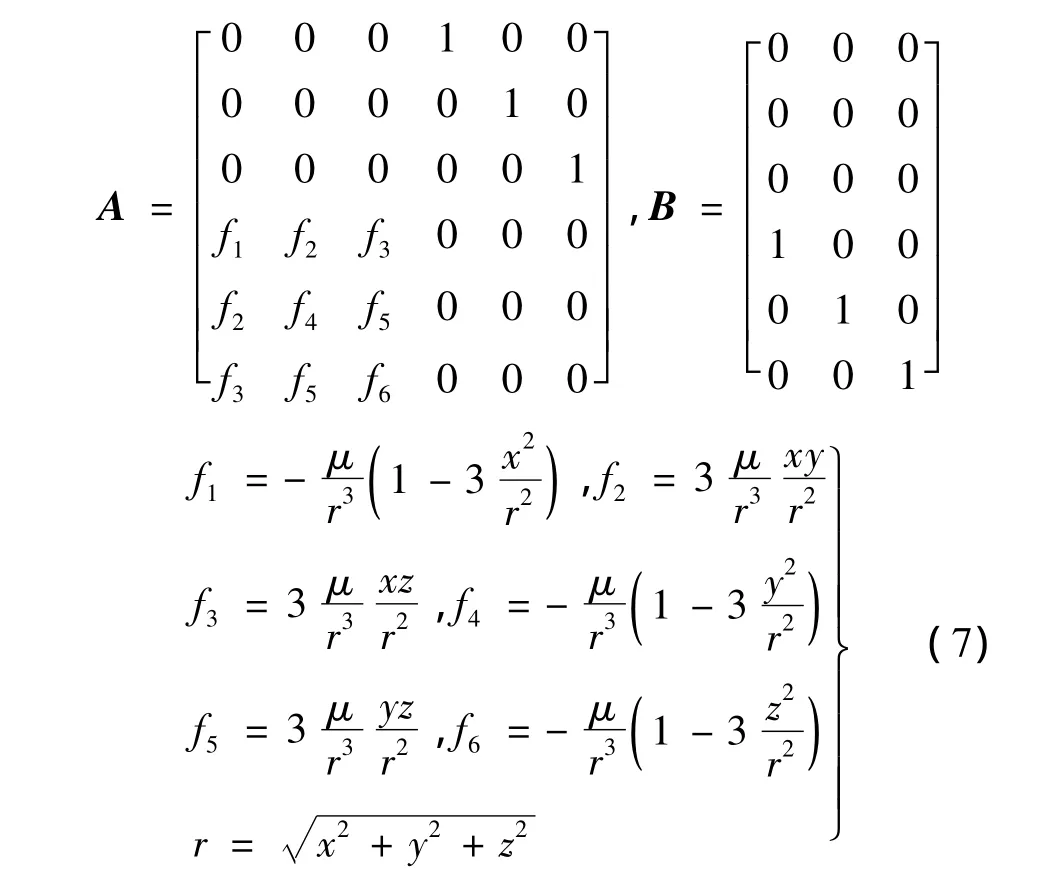
考慮到f1~f6<2×10-6,隨距離地心越遠(yuǎn)系數(shù)變得越小。將A陣簡(jiǎn)化為:
控制輸入u(t)為:

從而得到本文中的線性控制系統(tǒng)方程式(6)。
2 脈沖優(yōu)化控制方法
根據(jù)線性脈沖控制系統(tǒng)理論[14]可知,本文考慮如下類(lèi)型的脈沖線性系統(tǒng):

式中:k=1,…,N;A為n×n陣;Bδ為n×m陣;σ為脈沖時(shí)間間隔。
在本系統(tǒng)中,假定采樣間隔時(shí)間為σ,因此將式(9)離散化可得:

根據(jù)優(yōu)化性能指標(biāo),該優(yōu)化問(wèn)題可以看作線性調(diào)節(jié)器問(wèn)題。考慮狀態(tài)參數(shù)和控制參數(shù)的最優(yōu)值函數(shù)定義如下:

簡(jiǎn)化得:

假設(shè)(A,Bδ)穩(wěn)定,且(A,Q)可測(cè),則離散時(shí)間的調(diào)節(jié)器為:

其中:

根據(jù)終端條件可得:


故求得最優(yōu)反饋控制率為:

3 目標(biāo)轉(zhuǎn)移軌道確定
如果基于二體理論假設(shè),忽略攝動(dòng)影響,在固定時(shí)間內(nèi)的轉(zhuǎn)移,則可以用Lambert方法求解目標(biāo)軌道。而實(shí)際上因?yàn)閿z動(dòng)因素的存在,會(huì)造成與目標(biāo)軌道的偏移。為了減少實(shí)際轉(zhuǎn)移軌道與目標(biāo)軌道的偏差控制,減少飛行中控制燃料的消耗,需要對(duì)目標(biāo)軌道進(jìn)行較為精確的定軌。
分析各項(xiàng)攝動(dòng)力的影響,在空間中高空軌道上攝動(dòng)影響因素最大的為地球非球形攝動(dòng)力。目標(biāo)軌道定軌則可以根據(jù)軌道的攝動(dòng)因素精確分析軌道的受力情況,進(jìn)而求得軌道的飛行軌跡。
求解方法為:已知空間兩點(diǎn)的位置和軌道轉(zhuǎn)移時(shí)間,則該問(wèn)題為非線性方程兩點(diǎn)邊值問(wèn)題求解。考慮地球非球形攝動(dòng)J2項(xiàng)的影響,使用打靶法,設(shè)置給定誤差限制|r*-ro|<ε,ε>0,通過(guò) Lambert算法解出初值和末端值。以該初值作為飛行軌道的初值進(jìn)行數(shù)值迭代求解,從而獲得較為精確的目標(biāo)參考軌跡。如要求更高的目標(biāo)軌跡的精度,可根據(jù)實(shí)際工程需求,考慮多種攝動(dòng)的影響因素,進(jìn)行精確定軌。
4 數(shù)值仿真
本仿真以式(2)為模型,考慮系統(tǒng)中各種誤差、攝動(dòng)因素的影響,驗(yàn)證脈沖控制策略的正確和有效性。首先通過(guò)建立地心直角坐標(biāo)系,假定空間中轉(zhuǎn)移位置兩點(diǎn)為:x0[3.201×106m,6.073×106m,3.402 ×106m],xf[-2.185 ×107m,3.616 ×107m,2.442×104m],以及固定轉(zhuǎn)移時(shí)間t=15 000 s。
根據(jù)給定的位置和時(shí)間,求解目標(biāo)軌跡的位置和速度。首先利用Lambert方法求出初速度和末速度,根據(jù)打靶法,加入地球攝動(dòng)J2項(xiàng),反求出目標(biāo)軌跡。仿真中加入日月引力、大氣阻力攝動(dòng)的影響。發(fā)動(dòng)機(jī)的影響為執(zhí)行控制時(shí),加入的干擾為athr=1×10-3m/s2;加入隨機(jī)噪聲干擾為 aON=1 ×10-4m/s2;慣導(dǎo)測(cè)量誤差為ab=1×10-4m/s2;位置測(cè)量誤差為±300 m;速度測(cè)量誤差為±2 m/s。
控制策略為每2 000 s執(zhí)行一次控制,控制中系數(shù)矩陣 R,Q 分別為:R=10I(3×3),Q=I(6×6)。
根據(jù)文獻(xiàn)[14]可知,線性脈沖系統(tǒng)控制可達(dá)的最小脈沖控制次數(shù)為p=[m/n]。在本系統(tǒng)中m=6,n=3,通過(guò)計(jì)算可得p=2,所以在仿真計(jì)算中,每次脈沖間隔執(zhí)行兩次控制。相比文獻(xiàn)[5]中的方法,本文提出的周期脈沖控制方法在控制器的計(jì)算上不需每步均進(jìn)行計(jì)算,從而減少了計(jì)算時(shí)間,簡(jiǎn)化了工程計(jì)算量。仿真結(jié)果如圖1~圖3所示。

圖1 轉(zhuǎn)移參考軌跡與實(shí)際軌跡Fig.1 Trajectory of actual and target orbit
圖1 顯示實(shí)際軌跡和目標(biāo)參考軌跡的運(yùn)行圖。可以看出,飛行過(guò)程中受到各種干擾的影響,控制器能有效地修正運(yùn)行軌跡。圖2中顯示實(shí)際運(yùn)行軌跡和目標(biāo)軌跡的位置和速度狀態(tài)差值,在末位置較好地跟蹤了目標(biāo)軌跡。在末端時(shí)刻與終點(diǎn)的狀態(tài)位置和速度三個(gè)方向的偏差為:[585.9 m,-17.9 m,-447.4 m,0.463 m/s,0.243 m/s,- 0.643 m/s],距離終點(diǎn)位置為732 m,飛行器達(dá)到了預(yù)定目標(biāo)區(qū)域。圖3顯示飛行中速度控制改變量的大小。
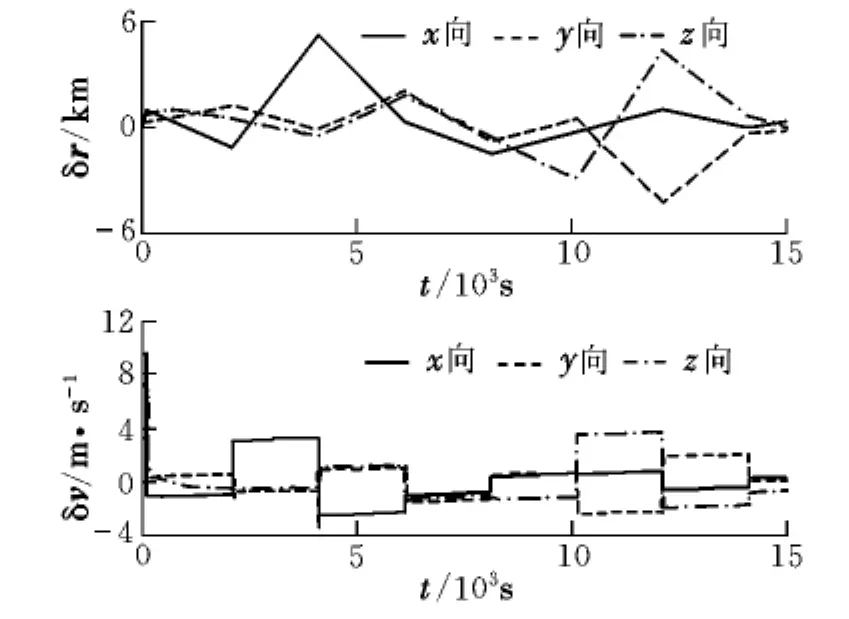
圖2 位置和速度的變化Fig.2 Change graph with position and velocity

圖3 脈沖速度控制變化Fig.3 Control of impulsive velocity
5 結(jié)束語(yǔ)
對(duì)于空間軌道轉(zhuǎn)移的修正問(wèn)題,本文提出了一種簡(jiǎn)化的二次型脈沖優(yōu)化控制方法。在考慮攝動(dòng)和測(cè)量誤差等因素條件下,利用攝動(dòng)制導(dǎo)的方法建立系統(tǒng)控制模型,同時(shí)對(duì)系統(tǒng)進(jìn)行線性簡(jiǎn)化。文中給出的仿真驗(yàn)證測(cè)試說(shuō)明,最終誤差達(dá)到遠(yuǎn)程軌道轉(zhuǎn)移中段要求的控制范圍。控制策略簡(jiǎn)化了計(jì)算量,提高了飛行器控制實(shí)時(shí)計(jì)算性能,可用于軌道轉(zhuǎn)移任務(wù)中間段的修正控制。
[1] Lantoine G,Epenoy R.Quadratically constrained linearquadratic regulator approach for finite-thrust orbital rendezvous[J].Journal of Guidance,Control,and Dynamics,2012,35(6):1787-1797.
[2] Prussing JE,Wellnitz L J,Heckathorn W G.Optimal impulsive time-fixed direct-ascent interception[J].Journal of Guidance,Control,and Dynamics,1989,12(4):487-494.
[3] Massoumnia M A.Optimal midcourse guidance law for fixed-interval propulsive maneuvers[J].Journal of Guid-ance,Control,and Dynamics,1995,18(3):465-470.
[4] Tarzi Z,Speyer J,Wirz R.Fuel optimum low-thrust elliptic transfer using numerical averaging[J].Acta Astronautica,2013,86:95-118.
[5] 湯一華,陳士櫓,萬(wàn)自明.基于零控脫靶量的大氣層外攔截中制導(dǎo)研究[J].飛行力學(xué),2007,25(3):34-37.
[6] 涂良輝,袁建平,羅建軍.基于偽光譜方法的有限推力軌道轉(zhuǎn)移優(yōu)化設(shè)計(jì)[J].宇航學(xué)報(bào),2008,29(4):1189-1193.
[7] 陳統(tǒng),徐世杰.基于遺傳算法的最優(yōu)Lambert雙脈沖轉(zhuǎn)移[J].北京航空航天大學(xué)學(xué)報(bào),2007,33(3):273-277.
[8] Huang Y C,Zhang Y Q,Xia H,et al.LQ-based optimization for linear impulsive control systems mixed with continuous-time controls and fixed-time impulses[C]//The 51st IEEE Conference on Decision and Control.Maui,Hawaii,USA:IEEE,2012:6144-6150.
[9] Miele A,Weeks M W,Ciarcia M.Optimal trajectories for spacecraft rendezvous[J].Journal of Optimization Theory and Applications,2007,132(3):353-376.
[10] Carter T,Humi M.Fuel-optimal rendezvous near a point in general keplerian orbit[J].Journal of Guidance,Control,and Dynamics,1987,10(6):567-573.
[11] Vallado D A.Fundamentals of astrodynamics and applications[M].2nd Ed.California:Microcosm Press,2001:462-602.
[12]徐延萬(wàn).控制系統(tǒng)[M].北京:中國(guó)宇航出版社,2009:254-263.
[13] Jesus G F,Miguel A G.Optimal guidance of low-thrust trajectories[J].Journal of Guidance,Control,and Dynamics,2010,33(6):1913-1917.
[14] Yang T.Impulsive control theory[M].Berlin Heidelberg:Springer Verlag,2001:20-33.
[15] Kwakernaak H,Sivan R.Linear optimal control systems[M].New York:Wiley-Interscience,1972:270-281.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
