雙饋風機機側換流控制器快速原型設計
2015-01-15 03:08:08陳康博馮海濤余永元
現(xiàn)代機械 2015年2期
關鍵詞:風速
陳康博,譚 興,馮海濤,余永元
(貴州大學 電氣工程學院,貴州 貴陽 550001)
0 引言
xPC target技術可將simulink模型自動的轉化為工控機可以執(zhí)行的C代碼,并將代碼下載到運行實時內核的目標工控機中高速運行,工控機通過數(shù)據(jù)采集卡與控制對象交換信息。xPC target快速原型化技術相對于手動編寫程序的DSP與FPGA大大提高了實驗效率[1],與其他快速原型化設備相比,又是一種低成本解決方案。
RTDS實時數(shù)字仿真器[2]可以方便直觀的對系統(tǒng)內的任意變量進行監(jiān)控、對變量進行在線調整,模擬任意的電力系統(tǒng)環(huán)境,在各種工況下對被測試設備進行檢驗;相對于物理模型,操作簡單方便,安全可靠,并可以模擬物理模型無法實現(xiàn)的各種工況,大幅度提高了實驗效率。
1 系統(tǒng)組成
1)RTDS:RTDS以小于2 μs的小步長運行雙饋風機模型的主電路,以大步長運行風機所在的電力系統(tǒng)模型和風機的網側換流器控制及變槳控制等。本文通過GTAO模擬輸出卡輸出發(fā)電機轉速、位置量,三相定子電壓、轉子電流、轉子電流等模擬電壓信號,通過GTDI數(shù)字輸入接收DSP發(fā)出的6路數(shù)字PWM信號。
2)xPC target目標機:即安裝有多功能數(shù)據(jù)采集卡的工控機。本實驗中xPC target目標機作為“極控”,通過數(shù)據(jù)采集卡采集風機各個參數(shù),經過矢量控制輸出機側換流器的基準電壓信號。工控機通過制作好的U盤啟動盤啟動,實時運行上位機下載的C代碼,由于涉及到變頻器控制,為了最大限度的提高運行速度,目標機運行方式采用“polling”模式,而非中斷模式[3],并且選擇了采集速度較快的NI PCI 6251多功能數(shù)據(jù)采集卡,在運算不溢出的前提下最大限度降低運行步長。NI PCI 6251采集卡設置為差分采集模式,降低干擾影響,提高采集精度。NI PCI 6251為多路復用式,每通道采集時間為1 μs,本實驗中雙饋式風機的額定頻率為50 Hz,并且轉子電流頻率更低,不同步采集帶來的誤差很小。
3)DSP:由于本實驗涉及電力電子器件觸發(fā)脈沖,PWM調制對運算步長要求較高,所以需要使用DSP充當“閥控”,通過其模擬輸入采集xPC target目標機輸出的基準電壓信號,可以運行各種PWM調制代碼。
2 雙饋風機變頻器機側控制策略
2.1 電流環(huán)控制模型
雙饋風機機側控制采用矢量控制,通過改變機側換流器交流側的電壓相位、幅值,獨立控制發(fā)電機發(fā)出的有功與無功,并實現(xiàn)最大風力追蹤[4]。
雙饋電機定轉子等效電路如圖1所示。
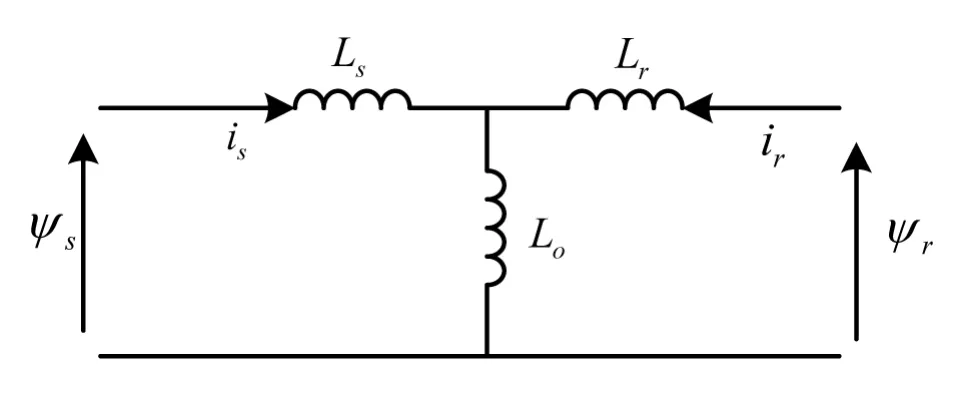
圖1 雙饋電機定轉子等效電路
定轉子磁鏈方程:

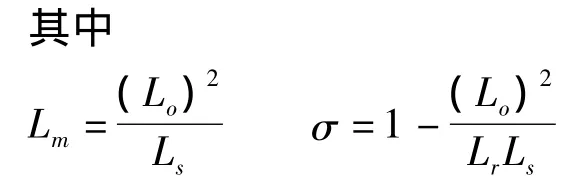
式中 ψs、ψr分別為定、轉子磁鏈;is、ir分別為定轉子電流;Lo為坐標系下同軸定、轉子繞組間的等效互感;Ls為定子繞組的自感;Lr為轉子繞組的自感。
從定子磁鏈方程中提出is:

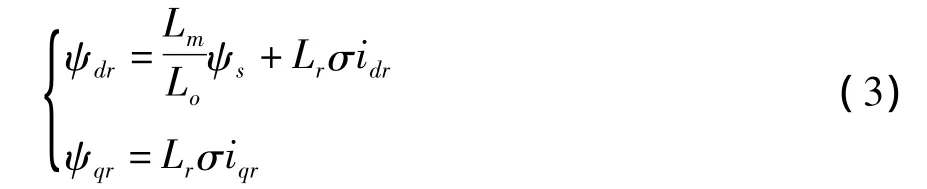
代入上式到轉子磁鏈方程得:

將方程轉化為DQ坐標系下,并在定子磁鏈定向[5]下有 ψds=ψs,ψqs=0 得:
代入轉子電壓方程:
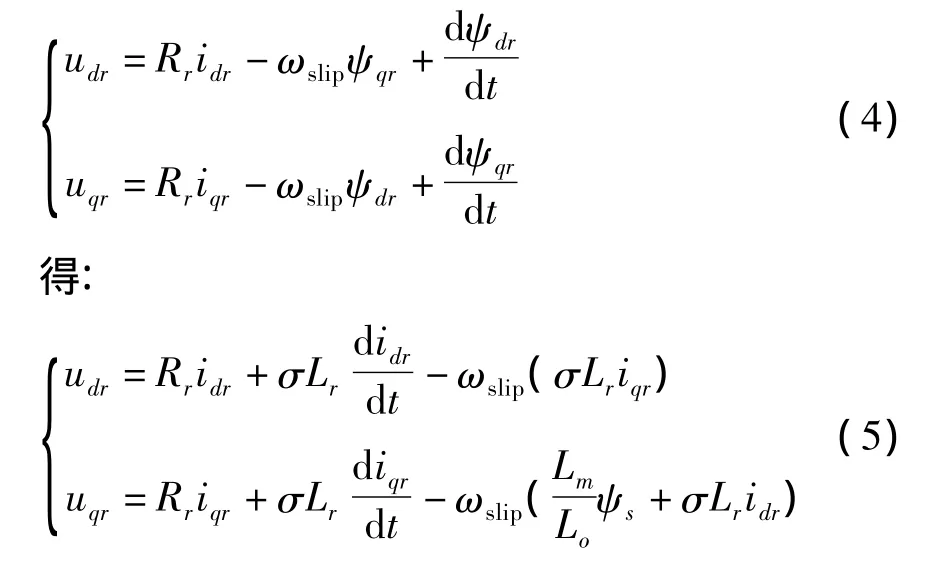
式中ωslip為滑差角頻率,Rr為轉子電阻,udr為轉子電壓D軸分量,uqr為轉子電壓Q軸分量。等式右端括號外的為解耦項。括號部分是前饋補償值,為了使DQ軸完全解耦。
對應上式(5)的控制模型[6]如圖2。
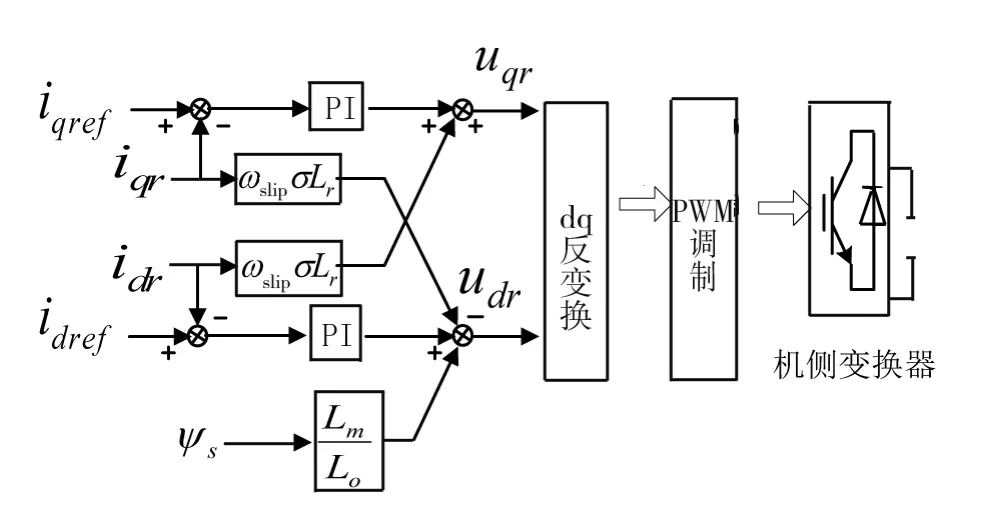
圖2 電流環(huán)控制模型
單獨調節(jié)D軸電流給定和Q軸電流給定可單獨調節(jié)風機輸出有功,定子輸出的無功。
2.2 最大功率追蹤實現(xiàn)方法
為實現(xiàn)最大功率捕捉,需要對Q軸電流給定值進行計算。反饋當前風機轉速,并假設其為最佳轉速(最佳葉尖速比下的轉速)。

通過公式求出以此轉速為最佳轉速時對應的最大功率,并求出相應的最佳電磁轉矩。

通過公式求出最佳電磁轉矩對應的Q軸電流。并以此電流作為Q軸電流給定[7]。
若當前轉速低于最佳轉速,那么通過當前轉速計算的最大功率popt會小于風輪機的機械功率,風機的電磁轉矩也會小于機械轉矩,風機加速直到達到最佳葉尖速比。同理,若當前轉速高于最佳轉速,風機會減速直到達到最佳葉尖速比,實現(xiàn)最大功率捕捉。
3 試驗裝置與RTDS的聯(lián)機試驗
風速從8 m/s突變?yōu)?2 m/s雙饋風機的運行狀態(tài)。
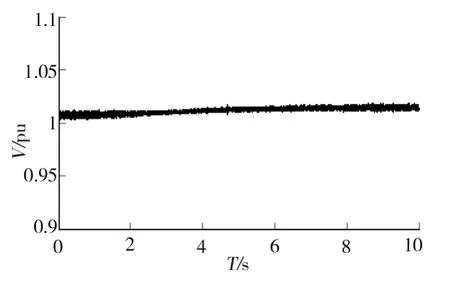
圖3 風速突變時風機出口電壓(標幺值)
風機出口電壓如圖(3),本實驗雙饋風機是經過10 kV電路并網,由于線路阻性參數(shù)不能忽略,并控制風機輸出無功不變,風機有功增加會略微提升風機端電壓。
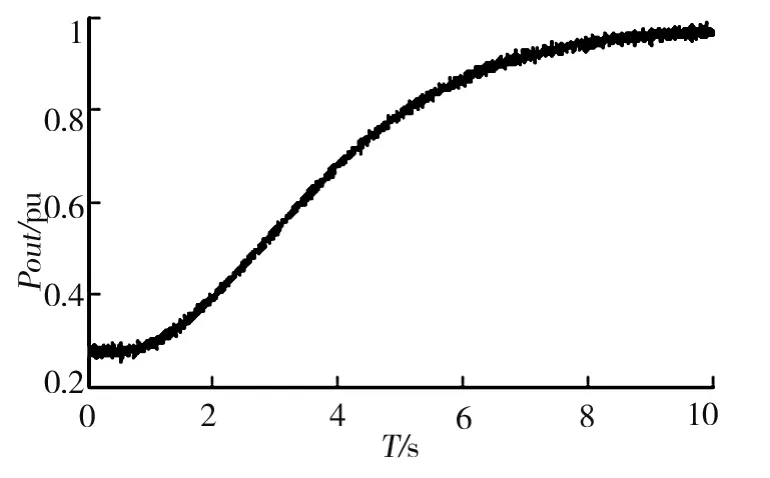
圖4 風速突變時風機功率(標幺值)
0.6 s時風速突變,風機功率變化如圖4,功率在10 s內從0.27 pu上升到額定值。

圖5 風速突變時轉子電流(kA)
風速突變時轉子電流變化如圖5電流頻率從-20 Hz變?yōu)?20 Hz,圖中3.5 s時達到同步轉速。
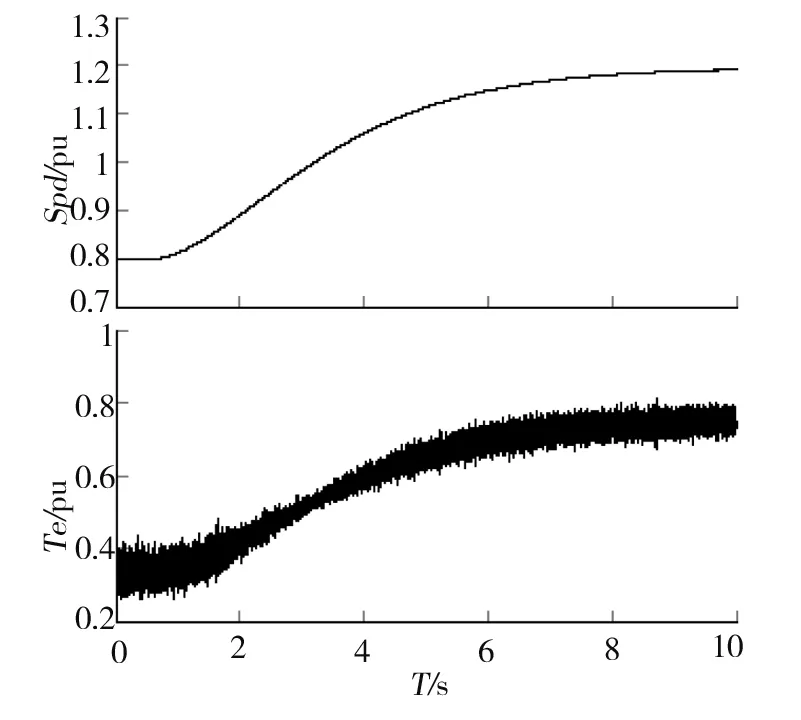
圖6 風速突變時轉速、電磁轉矩(標幺值)
風速突變時轉速、電磁轉矩的變化如圖6,0.6 s之前風速為8 m/s,轉速為0.8 pu。0.6 s風速增加到12 m/s,轉速相應的也在10 s內達到1.2 pu,維持在最佳葉尖速比,實現(xiàn)最大功率追蹤。
圖7為12 m/s風速下雙饋風機穩(wěn)定后額定運行狀態(tài),轉子電流定子電流和定子電壓的波形圖,波形正常,控制效果較為理想。
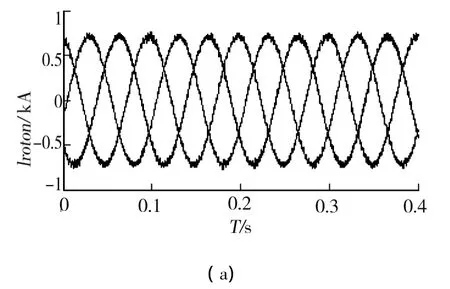

圖7 額定運行時定子電壓(kV)
4 結論
本文使用xPC-target技術與DSP相結合的辦法,完成了雙饋風機機側換流器控制器主要功能的設計。驗證了其作為一種低成本快速原型解決方案的可行性,并得出了較理想的控制效果。使用RTDS對風機控制器進行測試,可以方便的設置各種工況,并可以方便直觀的對控制效果進行評估。本文使用的方法也可以實現(xiàn)具有風機低電壓穿越,槳距控制等其他功能的原型設備的研發(fā)與測試。
[1] 李晶.基于xPC target的直線電機快速原型控制系統(tǒng)[J].中國機械工程,2011,22(20):2452-2455
[2] 郭琦.圖形化RTDS在線實時仿真系統(tǒng)[J].電力系統(tǒng)自動化,2010,39(13):38-42
[3] xPC Target User’s Guide[Z].Mathworks,2013:279-290
[4] R.Pena,J.C.Clare,G.M.Asher.Doubly fed induction generator using back-to-back PWM converters and its application to variable speed wind-energy generation[J].1996,IEE Proc.Power Appl.,(3):231-241
[5] 張世界.異步電機基于定子磁場定向的矢量控制系統(tǒng)的研究[J].信息化縱橫,2009,(17):67-69
[6] 邱生卓.雙饋風力發(fā)電場對電網暫態(tài)無功補償?shù)难芯浚跩].電測與儀表,2013,50(8):58-61
[7] Wind-turbine driven double-fed induction generator[Z].RTDS technologies,2011
猜你喜歡
氣象與環(huán)境科學(2021年4期)2021-08-27 02:26:12
電機與控制應用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
中國電業(yè)與能源(2020年5期)2020-06-16 02:20:00
陜西氣象(2020年2期)2020-06-08 00:54:38
西南交通大學學報(2016年4期)2016-06-15 20:29:37
風能(2016年11期)2016-03-04 05:24:00
電測與儀表(2015年8期)2015-04-09 11:50:06
電機與控制應用(2015年7期)2015-03-01 03:50:15
電網與清潔能源(2015年3期)2015-02-28 16:03:31
