全地形排爆機器人運動機構設計研究*
2015-03-02 06:25:28李國棟
機電工程 2015年6期
李 波 ,張 瑾 ,李國棟
(1.中國兵器裝備集團上海電控研究所,上海200092;2.杭州電子科技大學機械工程學院,浙江杭州310018)
0 引 言
排爆機器人是指能代替人到不能去或不適宜去的有爆炸危險的環境中,直接在事發現場進行偵察、排除和處理爆炸物及其他危險品,也可對持槍、持械的恐怖分子實施有效攻擊的機器人。排爆機器人的研制始于20 世紀60年代,隨著國際上反恐形勢日趨嚴峻和反恐斗爭的深入,特別是“911”恐怖襲擊事件以來,國內外的一些大公司、大學及科研院所,如美國的Remotec、iRobot,英國的P.W.Allen、ABP,德國的Telerob,國內的中科院沈陽自動化研究所、北京航空航天大學、上海交通大學等[1-2],都先后從事相關系統和技術研究,并取得了卓有成效的進展。
排爆機器人在實際運行中受地形限制較大,如何實現全地形環境下的可靠運行,是國內外均在努力的方向。
本研究擬完成相關動力系統參數論證計算,并利用有限元方法分析主要傳動系統器件參數,在此基礎上設計一臺高性能排爆機器人運動機構。
1 排爆機器人運動機構設計原理
機器人要在各種復雜地形下行走,樓梯、斜坡、障礙物是一定要克服的3 種地形要素。如果機器人的運動機構能通過上述3 種地形,就能在全地形條件下暢通無阻。
本研究針對以上設計需求,分析幾種常用運動機構:
(1)輪式機構。該機構結構簡單,速度快,易控制,被廣泛應用在各種車輛上。但由于車輪與地面接觸面積小,在軟、濕路面上,易產生沉陷和打滑,且越障能力不足,不能獨立完成復雜地形的移動[3]。
(2)履帶式機構。該機構與地面接觸面積大、壓強小、轉彎半徑小,牽引附著性能、越野機動性、爬坡越溝性能均優于輪式,但具有速度慢、減振差等缺點[4]。
(3)輪履復合機構。兼具以上兩種機構特點,既能在平整路面上快速移動,也能在溝壑縱橫的道路上運行[5]。
本研究設計要求機器人最大移動速度為1.6 m/s,能上、下不超過30°的斜坡(樓梯),跨越400 mm 壕溝,越過250 mm 高的障礙物,對機器人適應地形的能力提出了較高要求。經過初步分析,筆者決定采用六履帶四輪復合式運動機構[6]。翻轉臂履帶輪的直徑小于車輪,在高速運動時,前、后翻轉臂均收起,只有車輪著地,因而可以高速行駛。
排爆機器人總裝圖如圖1 所示。機器人在上、下樓梯或越障時,前、后翻轉臂放下起輔助支撐車輪向上/向下移動作用,完成攀爬功能。兩側車輪拆除后,車體能作為履帶式機構越過部分狹窄障礙物。
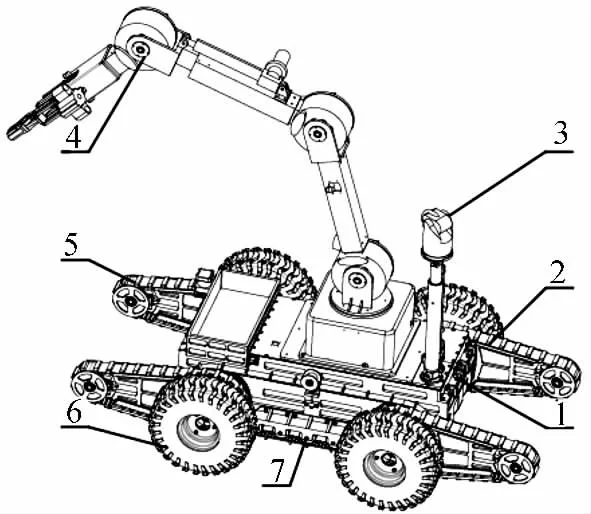
圖1 排爆機器人總裝圖
2 排爆機器人運動機構參數計算
2.1 機器人動力系統的組成
機器人主體移動機構由一對主履帶、翻轉臂所組成,主履帶通過兩臺后置伺服電機驅動,翻轉臂通過前后各一臺伺服電機驅動。
主驅動系主要由鋰電池、直流無刷電機、集成式行星減速機、錐齒輪副、主驅動輪等組成,其原理如圖2所示。
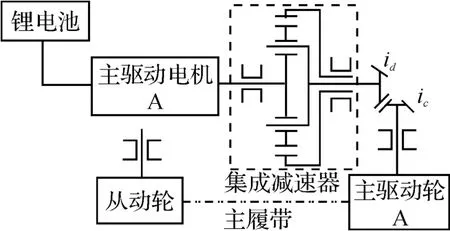
圖2 機器人主驅動系統原理圖
2.2 機器人傳動比的計算
2.2.1 傳動系最小減速比計算
機器人的最小減速比應由機器人行駛的最大速度及電機額定轉速共同決定。機器人的行駛速度、系統的傳動比如式(1~2)所示:
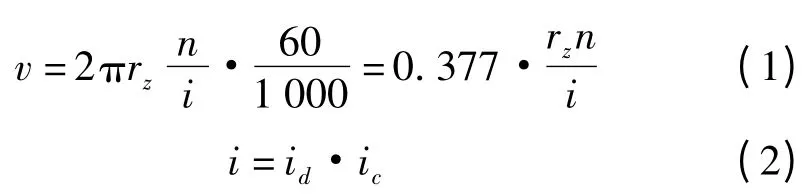
由式(1~2)得:

式中:v—機器人運動速度,km/s;n—驅動電機的轉速,r/min;ne—電機額定轉速,r/min;i—傳動比;rz—車輪外半徑,m。
設計采用BG 系列永磁無刷電機,額定轉速:ne=37 000 r/min;采用6 英寸山地車車輪作為輪系機構,外徑:rz=0.152 4 m。
由vmax=1.6 m/s(5.76 km/h),ne=3 700 r/min,rz=6(0.152 4 m)代入式(3)得:
2.2.2 傳動系最大減速比計算
機器人的最大減速比應由機器人行走時最小速度和電機額定轉速共同決定。根據電機外特性,機器人在低速爬坡時,應以峰值轉矩來計算傳動比。若將nfp=ne代入式(3)計算,則會產生較大誤差。所以,研究者應該用電機恒轉矩區間內的特性來計算其在最低速穩定爬坡時的調速比,使機器人能夠在設定的αmax=30°坡度上穩定爬坡,則其需要的牽引力為:

將式(4)代入式(3),得:
式中:Tmax—電動機峰值轉矩,N·m。
由電機外特性,選擇恒功率臨界點的速度nh=n,代入式(1),得:

將vmin=0.5 m/s,vmax=1.6 m/s,imin=43 代入式(6),得:
imax=137
2.3 機器人動力系統功率的計算
2.3.1 機器人額定功率計算
機器人在正常路面上行駛達到最大速度時,其所需功率即為最大額定功率,其計算公式如下:

式中:Pf—機器人在正常路面高速行駛時的最大功率,kW;G—機器人自重,N;CD—風阻系數;vmax—機器人最高行駛速度,km/s;fd—機器人在正常路面上行駛時的摩擦系數;η—機器人的機械效率。
由于機器人運行速度相對不高,為簡化計算而忽略風阻系數影響,即只考慮理想狀態下在正常道路上穩定行駛時的額定功率。則式(7)可簡約為:

式中:fd—摩擦系數,fd=sinα +f'cosα。若在正常路面上行駛,其坡度較小,故:cosα≈1,sin≈γ,則:

式中:f'—滾動摩擦系數,f' =0.03~0.04;γ—道路坡度,坡高與坡水平的距離之比,γ-0.025;fd=0.055~0.065。
機器人的機械效率由3 部分組成,如公式(10)所示:

式中:ηd—動力裝置機械效率,ηd=0.80~0.95;ηch—傳動裝置機械效率,ηch=0.80~0.90;ηx—行駛裝置的機械效率,ηx=0.85~0.90。
由于高速時,η 損失有所增加,η 應取較低值,即:η=0.578。
由設計任務要求機器人的標準配置:重量G =1 800 N,vmax=1.6 m/s(5.76 km/h)代入式(8)得:
Pf≈0.274 kW
為保障機器人完全具有帶G=600 N 負載能力,防止過載而損壞,取安全系數K =2,機器人需要的額定總功率為:
Pe=2 ×0.274≈0.548 kW
2.3.2 機器人電機最大轉矩計算
機器人主驅動電機最大轉矩的選取,應滿足爬坡和驍原地中心轉向為目標的需要,計算公式如下式所示:

式中:Tmax—電機最大轉矩,N·m;imax—最大傳動速比;imin—最小傳動速比;φ—履帶與地面附著系數;rz—車輪半徑,m。
由設計任務要求取:G =1 800 N,rz=0.152 4 m,vmax=1.8 km/h,μmax=1,imax=137,imin=43,fd=0.55~0.65,L=0.6 m,B=0.8 m,η =0.578,φ =0.4,代入式(11),得:
0.867 5 N·m≤Tmax≤5.14 N·m
3 排爆機器人運動機構仿真
通過機器人運動機構參數計算可知,最大轉矩靠錐齒傳動軸傳遞到車輪,是關鍵主零件。下面以錐齒傳動軸為例,論述有限元分析技術的應用。
該部件主要用于傳遞主驅動電機轉矩到外行駛輪,分析件在組裝圖中的位置如圖3 所示,是運動系統的關鍵部件。為了保證平臺在運行過程中的可靠性,需要知道分析件工作中的最大變形量和最大應力值,再與其所用材料的許用值進行比較,得出分析部件的安全系數和安全度結論[7]。所以,這里借助有限元分析技術對該傳動軸進行數值仿真模擬的建立和計算。
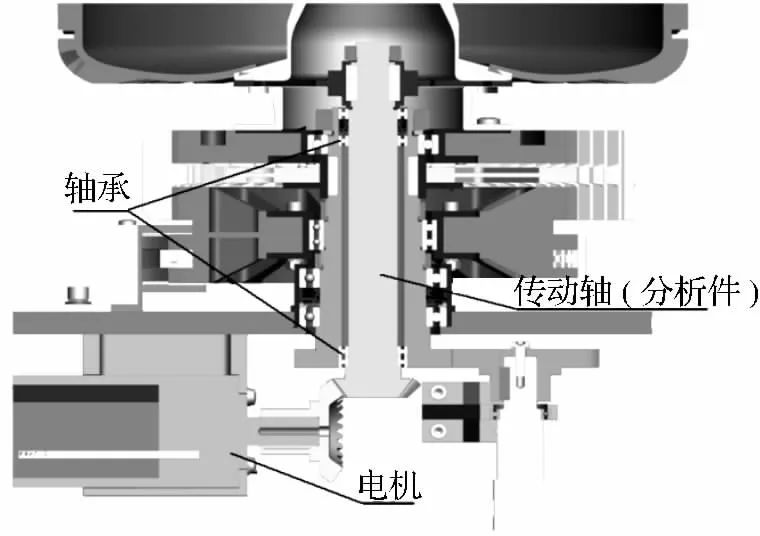
圖3 分析件在組裝圖中的位置
不同的分析目的對于CAD 模型的要求不同。在建立有限元模型時,如果只關注結構整體,則可以將結構的細小特征壓縮。例如,要分析結構整體模態,則可去除小的圓角、倒角和螺栓孔等。這就需要在簡化模型時本著抓住主要矛盾、忽略次要矛盾的理念,對不影響整個模型受力的細小結構和影響生成高質量網格的結構進行簡化和去除,保留主要結構,忽略次要結構[8]。
該零件選用45 號鋼,其材料特性如表1 所示。
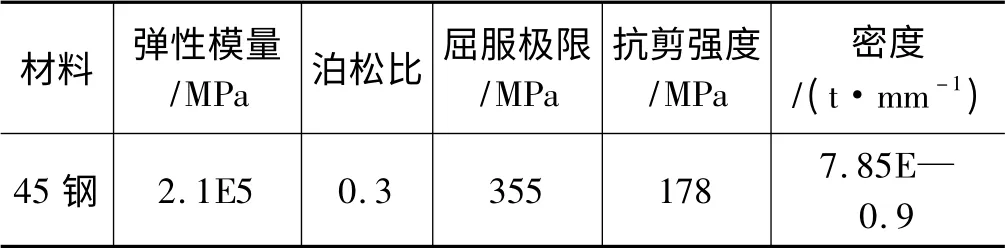
表1 選用材料屬性
綜合考慮模型最小幾何特征和網格數目等因素,本研究將平均網格尺寸設置為1 mm,選用8 節點六面體單元SOLID185,總共得到161 358 個節點和153 812 個單元。
根據已知約束和載荷條件,本研究在有限元模型上添加對應位置的約束和載荷如圖4 所示。
考慮該傳動軸在電機啟動的瞬間的應力值和變形量會是最大,此時的模型邊界條件包含:
(1)約束條件。階梯軸與固定軸承連接部分約束徑向和軸向移動,以及繞徑向和切向的轉動,鍵槽部分約束切向移動和軸向的轉動;
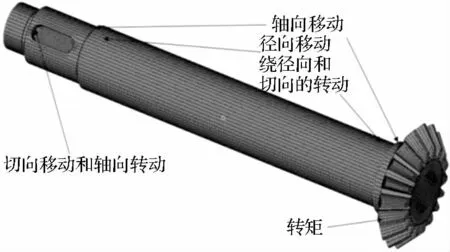
圖4 邊界條件施加位置
(2)載荷。考慮到齒輪傳動中兩對齒嚙合和一對齒嚙合兩種情況,選用電機啟動的瞬間只有一對齒嚙合的特殊情況,施加轉矩(考慮將轉矩轉化為力施加在單齒的切向方向上)為:
Tc=T×i×n=1 160 N·mm×42×18/22×0.81=32 288 N·mm
本研究將建立好得到的有限元模型導入大型有限元分析軟件ANSYS 中,可得到模型的變形量和應力計算結果,其變形云圖和應力值如圖5 所示。
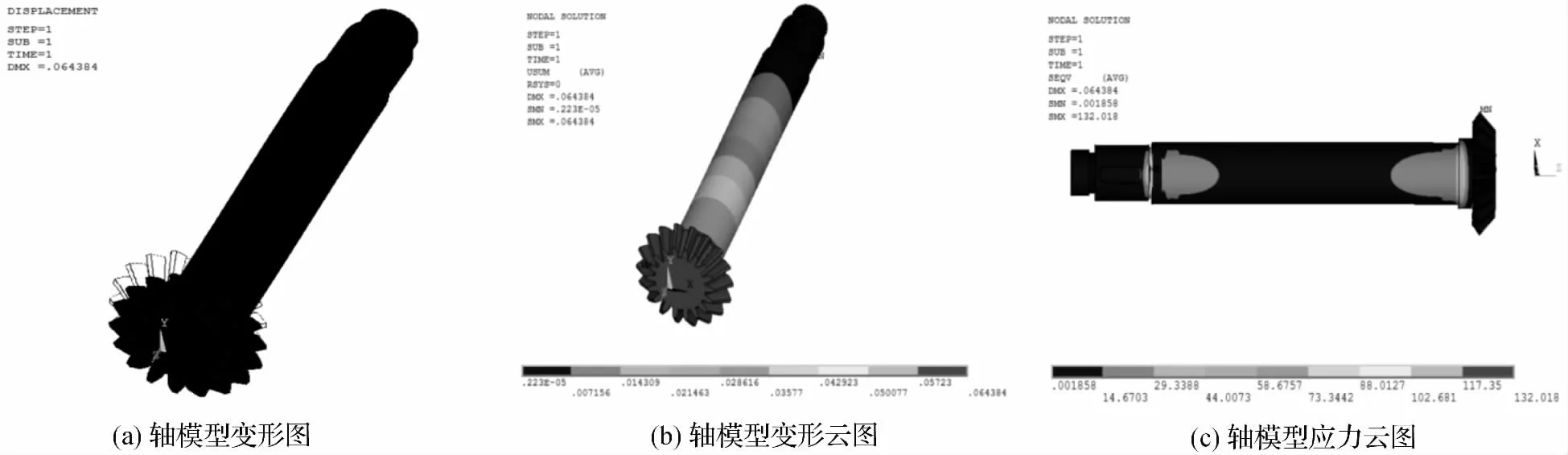
圖5 軸模型有限元分析計算的變形、應力云圖
由圖5 可以看出,該部件最大變形量為0.064 mm,主要分布在錐齒輪部位;該部件最大應力為132 MPa,分布在模型的軸向固定槽處。
由上述計算結果可知,該模型的最大應力為132 MPa,小于該零件材料的屈服強度355 MPa。其安全系數為n=355/128 =2.7。通過應力云圖可以看出分析件在軸向固定槽出現應力較大,其他大部分區域的應力值都很小,所以該零件在該種工況下足以滿足其強度要求。
4 機器人運動機構的測試
歷時近一年時間,目前本研究已完成排爆機器人運動機構的組裝調試工作,并對機構進行以下測試:
(1)正常路面行駛速度的測試。在混凝土路面,負重60 kg,全速運行;激光測速儀測得速度v=1.61 m/s。
(2)爬樓梯測試。樓梯臺階高150 mm、間距300 mm,每層有14 個臺階,中間有轉彎平臺分隔,共用時t=11.8 s,測試現場如圖6 所示。
(3)爬斜坡測試。斜坡傾角35°,從底部爬到頂部共用時約t =8 s。在斜坡任意位置可以暫停后重新啟動。
(4)跨越障礙物測試。用大石塊堆砌一道高250 mm、寬250 mm 的石檻,機構用時約t =5 s,順利跨越。
以上測試表明機器人運動機構完全符合設計要求。

圖6 爬樓梯試驗圖
5 結束語
本研究從運動學角度出發,在輪履復合機構越障機理的基礎上,推導出了動力系統的傳動比、額定功率、最大轉矩等參數的實用數值,并運用有限元分析技術優化了傳動系統主要部件的參數設計,提高了部件與整體系統的可靠性與安全性。最后對運動機構的運動性能進行了實地驗證,為今后進一步改進設計提供了寶貴經驗。
該排爆機器人運動機構尚未在復雜環境下進行嚴格測試,實際環境比本研究的試驗環境要更復雜,對運動機構的性能將提出更高要求,這是下一步將要繼續研究的方向。
[1]陳 波,李曉楠,王 進. 警用機器人一覽[J]. 輕兵器,2005(6):28-29.
[2]王越超.我國危險作業機器人研究開發取得新進展[J].機器人技術與應用,2005(6):11-18.
[3]曹其新,張 蕾.輪式自主移動機器人[M].上海:上海交通大學出版社,2012.
[4]陳淑艷,陳文家.履帶式移動機器人研究綜述[J].機電工程,2007,24(12):109-112.
[5]KIM J H,LEE C G. Variable transformation shapes of single-tracked mechanism for a rescue robot[C]//Proceedings of the 2007 IEEE International Conference on Control,Automation and Systems. Seoul:IEEE,2007:1057-1061.
[6]ROHMER E,YOSHIDA T,OHNO K,et al. Quince:A Collaborative Mobile Robotic Platform for Rescue Robots Research and Development[C]// The 5thInternational Conference on the Advanced Mechatronics. Tokyo:Japan Society of Mechanical Engineers,2010:225-230.
[7]張志文,等.機械結構有限元分析[M].哈爾濱:哈爾濱工業大學出版社,2002.
[8]趙汝嘉,曹 巖.機械結構有限元分析及應用軟件[M].北京:高等教育出版社,2012.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
光學精密工程(2016年6期)2016-11-07 09:07:19
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18